JP7226250B2 - 駆動装置、短絡検知方法及びコンピュータプログラム - Google Patents
駆動装置、短絡検知方法及びコンピュータプログラム Download PDFInfo
- Publication number
- JP7226250B2 JP7226250B2 JP2019200125A JP2019200125A JP7226250B2 JP 7226250 B2 JP7226250 B2 JP 7226250B2 JP 2019200125 A JP2019200125 A JP 2019200125A JP 2019200125 A JP2019200125 A JP 2019200125A JP 7226250 B2 JP7226250 B2 JP 7226250B2
- Authority
- JP
- Japan
- Prior art keywords
- switch
- switches
- motor
- circuit
- input
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H3/00—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection
- H02H3/08—Emergency protective circuit arrangements for automatic disconnection directly responsive to an undesired change from normal electric working condition with or without subsequent reconnection ; integrated protection responsive to excess current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02H—EMERGENCY PROTECTIVE CIRCUIT ARRANGEMENTS
- H02H7/00—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions
- H02H7/20—Emergency protective circuit arrangements specially adapted for specific types of electric machines or apparatus or for sectionalised protection of cable or line systems, and effecting automatic switching in the event of an undesired change from normal working conditions for electronic equipment
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P29/00—Arrangements for regulating or controlling electric motors, appropriate for both AC and DC motors
- H02P29/02—Providing protection against overload without automatic interruption of supply
- H02P29/024—Detecting a fault condition, e.g. short circuit, locked rotor, open circuit or loss of load
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P5/00—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors
- H02P5/68—Arrangements specially adapted for regulating or controlling the speed or torque of two or more electric motors controlling two or more dc dynamo-electric motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/285—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only
- H02P7/29—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual dc dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only using pulse modulation
Description
上記の態様に係る短絡検知方法及びコンピュータプログラムによれば、駆動装置が備えるスイッチの短絡を検知する。
最初に本開示の実施態様を列挙して説明する。以下に記載する実施形態の少なくとも一部を任意に組み合わせてもよい。
本開示の実施形態に係る電源システムの具体例を、以下に図面を参照しつつ説明する。なお、本発明はこれらの例示に限定されるものではなく、特許請求の範囲によって示され、特許請求の範囲と均等の意味および範囲内でのすべての変更が含まれることが意図される。
<電源システムの構成>
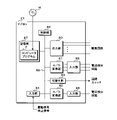
図1は、実施形態1における電源システム1の要部構成を示すブロック図である。電源システム1は、好適に車両に搭載されており、駆動装置10、第1モータ11、第2モータ12及び直流電源Uを備える。直流電源Uは例えばバッテリである。駆動装置10は、第1モータ11の一端及び他端に接続されるとともに、第2モータ12の一端及び他端に接続されている。駆動装置10は、更に、直流電源Uの正極に接続されている。駆動装置10及び直流電源Uの負極は接地されている。
停止信号が駆動装置10に入力された場合、駆動装置10は第1モータ11及び第2モータ12の動作を停止させる。
駆動装置10は、スイッチ回路20、マイクロコンピュータ(以下、マイコンという)21、直列回路22及び電圧検出回路23を有する。直列回路22は、回路スイッチ30、第1抵抗31及び第2抵抗32を有する。直列回路22では、回路スイッチ30、第1抵抗31及び第2抵抗32が直列に接続されている。回路スイッチ30の一端には、接地電位を基準とした一定電圧Vcが印加されている。回路スイッチ30の他端には、第1抵抗31の一端が接続されている。第1抵抗31の他端は第2抵抗32の一端に接続されている。第2抵抗32の他端は接地されている。
図2は、スイッチ回路20の構成を説明するための回路図である。スイッチ回路20は、入力端20a及び出力端20bを有する。入力端20aは直流電源Uの正極に接続されている。出力端20bは接地されている。電流は、直流電源Uの正極から入力端20aに入力される。電流は出力端20bから出力される。
以下では、第1入力スイッチ60及び第1出力スイッチ61間の接続ノードを第1接続ノードと記載する。更に、第2入力スイッチ70及び第2出力スイッチ71間の接続ノードを第2接続ノードと記載する。
駆動回路50,Dそれぞれは、駆動回路40と同様に、第2入力スイッチ70及び第3入力スイッチK1をオン又はオフに切替える。
図3は第1モータ11及び第2モータ12の駆動方法を示す図表である。第1モータ11及び第2モータ12の欄に記載されている「-」は動作の停止を示す。第1入力スイッチ60、第1出力スイッチ61、第2入力スイッチ70、第2出力スイッチ71、第3入力スイッチK1、第3中間スイッチM1及び第3出力スイッチN1の欄に記載されている「-」はオフを示す。
第1モータ11及び第2モータ12それぞれの回転速度は、第1モータ11及び第2モータ12に供給される電流の平均値に比例する。このため、スイッチ回路20が有する少なくとも1つのスイッチについて、PWM(Pulse Width Modulation)制御を行うことによって、第1モータ11及び第2モータ12の回転速度を調整することができる。以下では、PWM制御の対象であるスイッチをPWMスイッチと記載する。
図5はマイコン21の要部構成を示すブロック図である。マイコン21は、出力部80、A/D変換部81,82、切替え部83、入力部84,85,86、記憶部87及び制御部88を有する。出力部80、A/D変換部81,82、切替え部83、入力部84、記憶部87及び制御部88は内部バス89に接続されている。出力部80は、更に、スイッチ回路20の駆動回路40,41,50,51,D,E,Fに各別に接続されている。
電圧検出回路23は、ノード電圧を示すアナログの電圧情報を入力部86に出力する。入力部86は、アナログの電圧情報が入力された場合、入力されたアナログの電流情報をA/D変換部82に出力する。A/D変換部82は、入力部86から入力されたアナログの電圧情報をデジタルの電圧情報に変換する。制御部88は、A/D変換部82からデジタルの電圧情報を取得する。制御部88が取得した電圧情報が示すノード電圧は、取得時点において電圧検出回路23が検出したノード電圧と実質的に一致する。
図6は短絡検知処理の手順を示す図表である。制御部88は、第1モータ11及び第2モータ12が動作を停止している場合に短絡検知処理を実行する。短絡検知条件は、短絡が発生したとみなす条件である。短絡スイッチは、両端が短絡したスイッチである。禁止モータは、駆動が禁止されているモータである。
第1出力スイッチ61又は第3出力スイッチN1の両端が短絡している場合、第1モータ11に第1方向又は第2方向の電流を供給することができないので、第1モータ11の駆動を禁止する。
なお、回路スイッチ30は、第1抵抗31及び第2抵抗32間に接続されていてもよい。この場合、第1抵抗31の一端に一定電圧Vcが印加され、抵抗接続ノードは、回路スイッチ30及び第2抵抗32間の接続ノードである。
第2入力スイッチ70又は第3入力スイッチK1の両端が短絡している場合、第2方向又は第1方向の電流を第2モータ12に供給することができないので、第2モータ12の駆動を禁止する。
第2出力スイッチ71の両端が短絡している場合、第2モータ12に第2方向の電流を供給することができないため、第2モータ12の駆動を禁止する。
なお、手順5では、制御部88は、出力部80に第3入力スイッチK1のみのオンへの切替えを指示する代わりに、出力部80に第2入力スイッチ70のみのオンへの切替えを指示するか、又は、第3入力スイッチK1及び第2入力スイッチ70の両方のオンへの切替えを指示してもよい。
図7は通常駆動処理の手順を示すフローチャートである。制御部88は、スイッチ回路20が有する全てのスイッチが正常である場合において、入力部84に駆動信号が入力されたとき、通常駆動処理を実行する。通常駆動処理では、制御部88は、まず、入力部84に入力された駆動信号の内容に従って、第1モータ11及び第2モータ12の一方又は両方をスイッチ回路20に駆動させる(ステップS1)。
制御部88は、ステップS7を実行した後、出力部80に指示して、スイッチ回路20が有する全てのスイッチをオフに切替えさせ(ステップS8)、通常駆動処理を終了する。
図8は第1部分駆動処理の手順を示すフローチャートである。制御部88は、禁止モータが第2モータ12である場合において、入力部84に駆動信号が入力されたとき、第1部分駆動処理を実行する。第1部分駆動処理では、制御部88は、まず、入力部84に入力された駆動信号に基づいて、第1モータ11を駆動するか否かを判定する(ステップS11)。ステップS11では、制御部88は、駆動信号が示す駆動モータに第1モータ11が含まれている場合、第1モータ11を駆動すると判定する。制御部88は、駆動信号が駆動モータとして第2モータ12のみが示されている場合、第1モータ11を駆動しないと判定する。
図9は第2部分駆動処理の手順を示すフローチャートである。制御部88は、禁止モータが第1モータ11である場合において、入力部84に駆動信号が入力されたとき、第2部分駆動処理を実行する。第2部分駆動処理では、制御部88は、まず、入力部84に入力された駆動信号に基づいて、第2モータ12を駆動するか否かを判定する(ステップS21)。ステップS21では、制御部88は、駆動信号が示す駆動モータに第2モータ12が含まれている場合、第2モータ12を駆動すると判定する。制御部88は、駆動信号が駆動モータとして第1モータ11のみが示されている場合、第2モータ12を駆動しないと判定する。
図10は第3部分駆動処理の手順を示すフローチャートである。制御部88は、禁止モータが第1モータ11又は第2モータ12である場合、即ち、第3中間スイッチM1の短絡を検知した場合において、入力部84に駆動信号が入力されたとき、第3部分駆動処理を実行する。第3部分駆動処理では、制御部88は、まず、第1部分駆動処理のステップS11と同様に、入力部84に入力された駆動信号に基づいて、第1モータ11を駆動するか否かを判定する(ステップS31)。
第1モータ11の一端及び他端それぞれが、正常な2つのスイッチ間の接続ノードに接続されている場合、駆動装置10は第1モータ11を正方向及び逆方向に回転させることができる。同様に、第2モータ12の一端及び他端それぞれが、正常な2つのスイッチ間の接続ノードに接続されている場合、駆動装置10は第2モータ12を正方向及び逆方向に回転させることができる。第3接続回路C1が有する3つのスイッチ中の1つの両端が短絡した場合であっても、第1モータ11又は第2モータ12の一端は、第3接続回路C1が有する残りの2つのスイッチ間の接続ノードに接続されている。このため、第3接続回路C1が有する1つのスイッチの両端が短絡した場合であっても、第1モータ11又は第2モータ12を正方向及び逆方向に回転させることができる。
制御部88は、第1モータ11又は第2モータ12を駆動している間、第1入力スイッチ60、第2入力スイッチ70及び第3入力スイッチK1を介して流れる電流に基づいて、スイッチ回路20の故障又は異常を検知してもよい。
実施形態1において、第3中間スイッチM1の両端が短絡している場合において、制御部88は第1モータ11の駆動を優先する。しかしながら、駆動が優先されるモータは第1モータ11に限定されない。
以下では、実施形態2について、実施形態1と異なる点を説明する。後述する構成を除く他の構成は、実施形態1と共通している。このため、実施形態1と共通する構成部には実施形態1と同一の参照符号を付してその説明を省略する。
図11は実施形態2における第3部分駆動処理の手順を示すフローチャートである。制御部88は、禁止モータが第1モータ11又は第2モータ12である場合、即ち、第3中間スイッチM1の短絡を検知した場合において、入力部84に駆動信号が入力されたとき、第3部分駆動処理を実行する。実施形態2における第3部分駆動処理の大部分は実施形態1における第3部分駆動処理と同様である。このため、実施形態2における第3部分駆動処理において、第3部分駆動処理と同様である部分、即ち、ステップS32~S40の詳細な説明を省略する。
実施形態2における駆動装置10は、実施形態1における駆動装置10が奏する効果の中で、第3部分駆動処理において第1モータ11の駆動を優先することによって得られる効果を除く他の効果を同様に奏する。
実施形態1では、駆動装置10が駆動するモータの数は2である。しかしながら、駆動装置10が駆動するモータの数は3以上であってもよい。
以下では、実施形態3について、実施形態1と異なる点を説明する。後述する構成を除く他の構成は、実施形態1と共通している。このため、実施形態1と共通する構成部には実施形態1と同一の参照符号を付してその説明を省略する。
図12は、実施形態3におけるスイッチ回路20の構成を説明するための回路図である。実施形態3における電源システム1は、駆動装置10、第1モータ11、第2モータ12、第3モータ13及び直流電源Uを備える。実施形態3における駆動装置10は、第1モータ11、第2モータ12及び第3モータ13を駆動する。実施形態3におけるスイッチ回路20は、第1モータ11及び第2モータ12に加えて、第3モータ13の一端及び他端に接続されている。第3モータ13は第1モータ11又は第2モータ12と同様に構成されている。第3モータ13を第1方向(図12の右方向)の電流が流れた場合、第1モータ11又は第2モータ12と同様に、第3モータ13は正方向に回転する。第3モータ13を第2方向(図12の左方向)の電流が流れた場合、第1モータ11又は第2モータ12と同様に逆方向に回転する。第3モータ13への電流の供給が停止した場合、第3モータ13は回転を停止する。正方向は、時計回り及び反時計回りのいずれであってもよい。
図13は短絡検知処理の手順を示す図表である。制御部88は、第1モータ11、第2モータ12及び第3モータ13が動作を停止している場合に、実施形態1と同様に、短絡検知処理を実行する。
制御部88は、まず、手順1を実行する。手順1では、制御部88は、出力部80に、スイッチ回路20が有する全てのスイッチのオフへの切替えを指示しており、かつ、回路スイッチ30がオフである状態で抵抗接続ノードのノード電圧を示す電圧情報を取得する。制御部88は、取得した電圧情報が示すノード電圧が電圧閾値以上である場合、第1入力スイッチ60の短絡を検知する。制御部88は、第1入力スイッチ60の短絡を検知した場合、第1モータ11及び第3モータ13の駆動を禁止し、短絡検知処理を終了する。
実施形態3においても、制御部88は、コンピュータプログラムPを実行することによって、種々の駆動処理を実行する。これらの駆動処理では、実施形態1又は実施形態2と同様に、制御部88は、禁止モータを駆動することなく、駆動信号が示す内容が可能な限り満たされるように、第1モータ11、第2モータ12及び第3モータ13中の少なくとも1つを駆動する。禁止モータが第1モータ11若しくは第3モータ13である場合、又は、禁止モータが第2モータ12若しくは第3モータ13である場合、実施形態1又は実施形態2の第3部分駆動処理と同様に一方のモータの駆動を優先させる。
第3接続回路C1,C2が有する6つのスイッチ中の1つの両端が短絡した場合であっても、第1モータ11又は第2モータ12の一端は、正常な2つのスイッチ間の接続ノードに接続されている。このため、第3接続回路C1,C2が有する6つのスイッチ中の1つの両端が短絡した場合であっても、第1モータ11又は第2モータ12を正方向及び逆方向に回転させることができる。実施形態3における駆動装置10は、実施形態1又は実施形態2における駆動装置10が奏する効果を同様に奏する。
実施形態3では、駆動装置10が駆動するモータの数は3である。しかしながら、駆動装置10が駆動するモータの数は4以上であってもよい。
以下では、実施形態4について、実施形態3と異なる点を説明する。後述する構成を除く他の構成は、実施形態3と共通している。このため、実施形態3と共通する構成部には実施形態3と同一の参照符号を付してその説明を省略する。
図14は、実施形態4におけるスイッチ回路20の構成を説明するための回路図である。実施形態4における電源システム1は、駆動装置10、第1モータ11、第2モータ12、複数の第3モータ13及び直流電源Uを備える。実施形態4における駆動装置10は、第1モータ11及び第2モータ12に加えて、複数の第3モータ13を駆動する。実施形態3におけるスイッチ回路20は、第1モータ11及び第2モータ12に加えて、複数の第3モータ13それぞれの一端及び他端に接続されている。
以上のように構成された駆動装置10であっても、実施形態3と同様に、マイコン21の制御部88は、第3接続回路C1,C2,・・・,Ciの第3中間スイッチを順次オンに切替えることによって、スイッチ回路20が有する全てのスイッチの短絡を検知することができる。
実施形態4においても、制御部88は、コンピュータプログラムPを実行することによって、種々の駆動処理を実行する。これらの駆動処理では、実施形態3と同様に、制御部88は、禁止モータを駆動することなく、駆動信号が示す内容が可能な限り満たされるように、第1モータ11、第2モータ12及び複数の第3モータ13中の少なくとも1つを駆動する。禁止モータが2つのモータの一方である場合、例えば、第1モータ11又は第3モータ13である場合、実施形態1又は実施形態2の第3部分駆動処理と同様に一方のモータの駆動を優先させる。
第3接続回路C1,C2,・・・,Ciが有するスイッチ中の1つの両端が短絡した場合であっても、第1モータ11又は第2モータ12の一端は、正常な2つのスイッチ間の接続ノードに接続されている。このため、第3接続回路C1,C2,・・・,Ciが有するスイッチの1つの両端が短絡した場合であっても、第1モータ11又は第2モータ12を正方向及び逆方向に回転させることができる。実施形態4における駆動装置10は、実施形態3における駆動装置10が奏する効果を同様に奏する。
実施形態1では、直列回路22において抵抗接続ノードは回路スイッチ30の下流側に位置する。しかしながら、抵抗接続ノードは回路スイッチ30の上流側であってもよい。
以下では、実施形態5について、実施形態1と異なる点を説明する。後述する構成を除く他の構成は、実施形態1と共通している。このため、実施形態1と共通する構成部には実施形態1と同一の参照符号を付してその説明を省略する。
図15は実施形態5における直列回路22の回路図である。図15に示すように、第1抵抗31の一端に一定電圧Vcが印加されている。第1抵抗31の他端は第2抵抗32の一端に接続されている。第2抵抗32の他端は回路スイッチ30の一端に接続され、回路スイッチ30の他端は接地されている。
なお、回路スイッチ30は第1抵抗31及び第2抵抗32間に接続されていてもよい。この場合、抵抗接続ノードは回路スイッチ30及び第1抵抗31間の接続ノードである。
図16は短絡検知処理の手順を示す図表である。マイコン21の制御部88は、実施形態1と同様に短絡検知処理を実行する。実施形態5においては、電圧閾値は、第1抵抗31及び第2抵抗32が一定電圧Vcを分圧することによって得られる分圧電圧を超えており、かつ、一定電圧Vc以下である。実施形態1の説明で述べたように、一定電圧Vcは直流電源Uの電源電圧未満である。
実施形態5における駆動装置10は、実施形態1における駆動装置10が奏する効果を同様に奏する。
実施形態5において、制御部88は、実施形態2と同様に第3部分駆動処理を実行してもよい。実施形態3,4における直列回路22は、実施形態5における直列回路22と同様に構成されていてもよい。実施形態3,4における短絡検知処理は、実施形態5と同様に実行される。
実施形態1~5において、第1モータ11、第2モータ12又は第3モータ13の抵抗成分値が第1抵抗31及び第2抵抗32の抵抗値よりも十分に小さくない場合、抵抗値が小さい抵抗を第1モータ11、第2モータ12又は第3モータ13に並列に接続してもよい。これにより、制御部88は、短絡検知処理を適切に実行することができる。
10 駆動装置
11 第1モータ
12 第2モータ
13 第3モータ
20 スイッチ回路
20a 入力端
20b 出力端
21 マイコン
22 直列回路
23 電圧検出回路
30 回路スイッチ
31 第1抵抗
32 第2抵抗
40,41,50,51,D,E,F 駆動回路
42,52,G 電流検出回路
60 第1入力スイッチ(第1スイッチ)
61 第1出力スイッチ(第1スイッチ)
70 第2入力スイッチ(第2スイッチ)
71 第2出力スイッチ(第2スイッチ)
80 出力部
81,82 A/D変換部
83 切替え部
84,85,86 入力部
87 記憶部
88 制御部(処理部)
89 内部バス
A 第1接続回路
B 第2接続回路
C1,C2,・・・,Ci 第3接続回路
H 記憶媒体
K1,K2 第3入力スイッチ(第3スイッチ)
M1,M2 第3中間スイッチ(第3スイッチ)
N1,N2 第3出力スイッチ(第3スイッチ)
P コンピュータプログラム
U 直流電源
Claims (14)
- 回転方向が自身を流れる電流の方向に応じて異なる第1モータ及び第2モータを駆動する駆動装置であって、
電流が入力される入力端、及び、電流が出力される出力端間に各別に接続される第1接続回路、第2接続回路及び第3接続回路を備え、
前記第1接続回路では、2つの第1スイッチが直列に接続され、
前記第2接続回路では、2つの第2スイッチが直列に接続され、
前記第3接続回路では、3つの第3スイッチが直列に接続され、
前記第1モータは、前記2つの第1スイッチ間の第1接続ノードと、前記出力端側の2つの第3スイッチ間の接続ノードとの間に接続され、
前記第2モータは、前記2つの第2スイッチ間の第2接続ノードと、前記入力端側の2つの第3スイッチ間の接続ノードとの間に接続される
駆動装置。 - 第1抵抗、第2抵抗及び回路スイッチが直列に接続され、前記第1抵抗及び第2抵抗間の抵抗接続ノードが前記第1接続ノードに接続され、一定電圧が印加されている直列回路と、
処理を実行する処理部と
を備え、
前記処理部は、
前記回路スイッチをオン又はオフに切替え、
前記抵抗接続ノードのノード電圧を示す電圧情報を取得し、
取得した電圧情報に基づいて、前記2つの第1スイッチ、前記2つの第2スイッチ及び前記3つの第3スイッチ中の1つの短絡を検知する
処理を実行する請求項1に記載の駆動装置。 - 前記抵抗接続ノードは前記回路スイッチの下流側の接続ノードであり、
前記処理部は、
前記2つの第1スイッチ、前記2つの第2スイッチ及び前記3つの第3スイッチのオフへの切替えを指示しており、かつ、前記回路スイッチがオフである場合における前記電圧情報を取得し、
取得した前記電圧情報に基づいて、前記入力端側の第1スイッチの短絡を検知する
処理を実行する請求項2に記載の駆動装置。 - 前記抵抗接続ノードは前記回路スイッチの下流側の接続ノードであり、
前記処理部は、
前記2つの第1スイッチ、前記2つの第2スイッチ及び前記3つの第3スイッチのオフへの切替えを指示しており、かつ、前記回路スイッチがオンである場合における前記電圧情報を取得し、
取得した前記電圧情報に基づいて、前記出力端側の第1スイッチ又は前記出力端側の第3スイッチの短絡を検知する
処理を実行する請求項2又は請求項3のいずれか1つに記載の駆動装置。 - 前記抵抗接続ノードは前記回路スイッチの下流側の接続ノードであり、
前記処理部は、
前記2つの第1スイッチ、前記2つの第2スイッチ、前記入力端側の第3スイッチ及び前記出力端側の第3スイッチのオフへの切替えを指示しており、前記入力端側の第3スイッチ及び前記出力端側の第3スイッチ間に接続されている第3スイッチのオンへの切替えを指示しており、かつ、前記回路スイッチがオフである場合における前記電圧情報を取得し、
取得した前記電圧情報に基づいて、前記入力端側の第2スイッチ又は前記入力端側の第3スイッチの短絡を検知する
処理を実行する請求項2から請求項4のいずれか1つに記載の駆動装置。 - 前記抵抗接続ノードは前記回路スイッチの下流側の接続ノードであり、
前記処理部は、
前記2つの第1スイッチ、前記2つの第2スイッチ、前記入力端側の第3スイッチ及び前記出力端側の第3スイッチのオフへの切替えを指示しており、前記入力端側の第3スイッチ及び前記出力端側の第3スイッチ間に接続されている第3スイッチのオンへの切替えを指示しており、かつ、前記回路スイッチがオンである場合における前記電圧情報を取得し、
取得した前記電圧情報に基づいて、前記出力端側の第2スイッチの短絡を検知する
処理を実行する請求項2から請求項5のいずれか1つに記載の駆動装置。 - 前記抵抗接続ノードは前記回路スイッチの下流側の接続ノードであり、
前記処理部は、
前記入力端側の第2スイッチ及び前記入力端側の第3スイッチの一方又は両方のオンへの切替えを指示しており、前記2つの第1スイッチ、前記2つの第2スイッチ及び前記3つの第3スイッチの中で残りのスイッチのオフへの切替えを指示しており、かつ、前記回路スイッチがオフである場合における前記電圧情報を取得し、
取得した前記電圧情報に基づいて、前記入力端側の第3スイッチ及び前記出力端側の第3スイッチ間に接続されている第3スイッチの短絡を検知する
処理を実行する請求項2から請求項6のいずれか1つに記載の駆動装置。 - 前記処理部は、前記出力端側の第1スイッチ又は前記出力端側の第3スイッチの短絡を検知した場合、前記2つの第2スイッチ及び前記3つの第3スイッチのオン又はオフへの切替えを各別に指示することによって前記第2モータのみを駆動する処理を実行する
請求項2から請求項7のいずれか1つに記載の駆動装置。 - 前記処理部は、前記2つの第2スイッチ及び前記入力端側の第3スイッチ中の1つの短絡を検知した場合、前記2つの第1スイッチ及び前記3つの第3スイッチのオン又はオフへの切替えを各別に指示することによって前記第1モータのみを駆動する処理を実行する
請求項2から請求項8のいずれか1つに記載の駆動装置。 - 前記処理部は、
前記入力端側の第3スイッチ及び前記出力端側の第3スイッチ間に接続されている第3スイッチの短絡を検知した場合、前記第1モータを駆動するか否かを判定し、
前記第1モータを駆動しないと判定した場合に前記第2モータを駆動する
処理を実行する請求項2から請求項9のいずれか1つに記載の駆動装置。 - 前記処理部は、
前記入力端側の第3スイッチ及び前記出力端側の第3スイッチ間に接続されている第3スイッチの短絡を検知した場合、前記第2モータを駆動するか否かを判定し、
前記第2モータを駆動しないと判定した場合に前記第1モータを駆動する
処理を実行する請求項2から請求項9のいずれか1つに記載も駆動装置。 - 前記第3接続回路の数は2以上であり、
前記第1モータは、前記2つの第1スイッチ間の接続ノードと、複数の第3接続回路の1つに係る前記出力端側の2つの第3スイッチ間の出力側接続ノードとの間に接続され、
前記第2モータは、前記2つの第2スイッチ間の接続ノードと、前記複数の第3接続回路の中で前記第1モータが接続されている第3接続回路とは異なる第3接続回路に係る前記入力端側の2つの第3スイッチ間の入力側接続ノードとの間に接続され、
2つの第3接続回路の一方の入力側接続ノードと、前記2つの第3接続回路の他方の出力側接続ノード間に、回転方向が自身を流れる電流の方向に応じて異なる第3モータが接続され、
各第3接続回路の入力側接続ノード及び出力側接続ノードそれぞれに接続されるモータの数は1である
請求項1に記載の駆動装置。 - 2つの第1スイッチと、2つの第2スイッチと、3つの第3スイッチと、第1抵抗、第2抵抗及び回路スイッチが直列に接続され、一定電圧が印加されている直列回路とを備え、回転方向が自身を流れる電流の方向に応じて異なる第1モータ及び第2モータを駆動する駆動装置の前記回路スイッチをオン又はオフに切替えるステップと、
前記第1抵抗及び第2抵抗間の抵抗接続ノードのノード電圧を示す電圧情報を取得するステップと、
取得した電圧情報に基づいて、前記2つの第1スイッチ、前記2つの第2スイッチ及び前記3つの第3スイッチ中の1つの短絡を検知するステップと
をコンピュータが実行し、
前記駆動装置は、電流が入力される入力端、及び、電流が出力される出力端間に各別に接続される第1接続回路、第2接続回路及び第3接続回路を更に備え、
前記第1接続回路では、前記2つの第1スイッチが直列に接続され、
前記第2接続回路では、前記2つの第2スイッチが直列に接続され、
前記第3接続回路では、前記3つの第3スイッチが直列に接続され、
前記第1モータは、前記2つの第1スイッチ間の第1接続ノードと、前記出力端側の2つの第3スイッチ間の接続ノードとの間に接続され、
前記第2モータは、前記2つの第2スイッチ間の第2接続ノードと、前記入力端側の2つの第3スイッチ間の接続ノードとの間に接続され、
前記抵抗接続ノードが前記第1接続ノードに接続される
短絡検知方法。 - 2つの第1スイッチと、2つの第2スイッチと、3つの第3スイッチと、第1抵抗、第2抵抗及び回路スイッチが直列に接続され、一定電圧が印加されている直列回路とを備え、回転方向が自身を流れる電流の方向に応じて異なる第1モータ及び第2モータを駆動する駆動装置の前記回路スイッチをオン又はオフに切替えるステップと、
前記第1抵抗及び第2抵抗間の抵抗接続ノードのノード電圧を示す電圧情報を取得するステップと、
取得した電圧情報に基づいて、前記2つの第1スイッチ、前記2つの第2スイッチ及び前記3つの第3スイッチ中の1つの短絡を検知するステップと
をコンピュータに実行させるために用いられ、
前記駆動装置は、電流が入力される入力端、及び、電流が出力される出力端間に各別に接続される第1接続回路、第2接続回路及び第3接続回路を更に備え、
前記第1接続回路では、前記2つの第1スイッチが直列に接続され、
前記第2接続回路では、前記2つの第2スイッチが直列に接続され、
前記第3接続回路では、前記3つの第3スイッチが直列に接続され、
前記第1モータは、前記2つの第1スイッチ間の第1接続ノードと、前記出力端側の2つの第3スイッチ間の接続ノードとの間に接続され、
前記第2モータは、前記2つの第2スイッチ間の第2接続ノードと、前記入力端側の2つの第3スイッチ間の接続ノードとの間に接続され、
前記抵抗接続ノードが前記第1接続ノードに接続される
コンピュータプログラム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019200125A JP7226250B2 (ja) | 2019-11-01 | 2019-11-01 | 駆動装置、短絡検知方法及びコンピュータプログラム |
| DE112020005396.2T DE112020005396T5 (de) | 2019-11-01 | 2020-10-13 | Treibervorrichtung, Kurzschlusserfassungsverfahren und Computerprogramm |
| US17/755,522 US11799402B2 (en) | 2019-11-01 | 2020-10-13 | Drive device, short circuit detection method, and computer program |
| PCT/JP2020/038613 WO2021085118A1 (ja) | 2019-11-01 | 2020-10-13 | 駆動装置、短絡検知方法及びコンピュータプログラム |
| CN202080071271.XA CN114556769A (zh) | 2019-11-01 | 2020-10-13 | 驱动装置、短路探测方法和计算机程序 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2019200125A JP7226250B2 (ja) | 2019-11-01 | 2019-11-01 | 駆動装置、短絡検知方法及びコンピュータプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2021072756A JP2021072756A (ja) | 2021-05-06 |
| JP2021072756A5 JP2021072756A5 (ja) | 2022-02-24 |
| JP7226250B2 true JP7226250B2 (ja) | 2023-02-21 |
Family
ID=75713869
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2019200125A Active JP7226250B2 (ja) | 2019-11-01 | 2019-11-01 | 駆動装置、短絡検知方法及びコンピュータプログラム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US11799402B2 (ja) |
| JP (1) | JP7226250B2 (ja) |
| CN (1) | CN114556769A (ja) |
| DE (1) | DE112020005396T5 (ja) |
| WO (1) | WO2021085118A1 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2023090440A (ja) * | 2021-12-17 | 2023-06-29 | 株式会社オートネットワーク技術研究所 | 給電制御装置及び故障検知方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006506262A (ja) | 2002-11-14 | 2006-02-23 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | デュアルモータワイパ装置のための制御装置 |
| CN102801353A (zh) | 2012-08-10 | 2012-11-28 | 北京海斯德电机技术有限公司 | 一种基于空间矢量的纯电磁磁轴承系统开关功率放大器 |
| JP2018518135A (ja) | 2015-06-01 | 2018-07-05 | アロス、エレクトロニクス、アクチボラグAros Electronics Ab | Dcバスのリップルの低減 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH1014285A (ja) * | 1996-06-25 | 1998-01-16 | Toshiba Corp | 直流モータ駆動回路およびその制御方式 |
| JP2001061288A (ja) * | 1999-08-19 | 2001-03-06 | Shibaura Densan Kk | インバータ装置 |
| JP3957177B2 (ja) * | 2002-07-30 | 2007-08-15 | 本田技研工業株式会社 | モータ駆動装置 |
| KR100774763B1 (ko) | 2006-07-24 | 2007-11-08 | 현대자동차주식회사 | Agcs 모터 드라이버 |
| JP2009033835A (ja) * | 2007-07-25 | 2009-02-12 | Tokai Rika Co Ltd | 負荷駆動制御回路 |
| JP2015051718A (ja) | 2013-09-06 | 2015-03-19 | 日立オートモティブシステムズ株式会社 | モータ制御装置 |
| JP2019200125A (ja) | 2018-05-16 | 2019-11-21 | 三菱電機株式会社 | 経路案内制御装置および経路案内制御方法 |
-
2019
- 2019-11-01 JP JP2019200125A patent/JP7226250B2/ja active Active
-
2020
- 2020-10-13 CN CN202080071271.XA patent/CN114556769A/zh active Pending
- 2020-10-13 WO PCT/JP2020/038613 patent/WO2021085118A1/ja active Application Filing
- 2020-10-13 US US17/755,522 patent/US11799402B2/en active Active
- 2020-10-13 DE DE112020005396.2T patent/DE112020005396T5/de active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006506262A (ja) | 2002-11-14 | 2006-02-23 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | デュアルモータワイパ装置のための制御装置 |
| CN102801353A (zh) | 2012-08-10 | 2012-11-28 | 北京海斯德电机技术有限公司 | 一种基于空间矢量的纯电磁磁轴承系统开关功率放大器 |
| JP2018518135A (ja) | 2015-06-01 | 2018-07-05 | アロス、エレクトロニクス、アクチボラグAros Electronics Ab | Dcバスのリップルの低減 |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112020005396T5 (de) | 2022-08-18 |
| US11799402B2 (en) | 2023-10-24 |
| JP2021072756A (ja) | 2021-05-06 |
| CN114556769A (zh) | 2022-05-27 |
| US20220376637A1 (en) | 2022-11-24 |
| WO2021085118A1 (ja) | 2021-05-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5537272B2 (ja) | 負荷駆動回路装置及びこれを用いた電気機器 | |
| JP4688693B2 (ja) | 電力供給制御装置 | |
| JP4229656B2 (ja) | 電流制限回路およびそれを備えた出力回路 | |
| US11533016B2 (en) | Motor driving device and steering system | |
| JP3329541B2 (ja) | モータ制御装置とモータ制御方法 | |
| JP6708003B2 (ja) | 給電制御装置 | |
| JP7363955B2 (ja) | 給電制御装置、給電制御方法及びコンピュータプログラム | |
| JP7226250B2 (ja) | 駆動装置、短絡検知方法及びコンピュータプログラム | |
| JP5077030B2 (ja) | モータ駆動回路およびモータの異常判定方法 | |
| JP7238703B2 (ja) | 駆動装置 | |
| JP6710188B2 (ja) | モータ駆動制御装置及びモータの駆動制御方法 | |
| JP7294127B2 (ja) | 給電制御装置 | |
| JP2008118821A (ja) | 直流モータ駆動制御装置 | |
| JP7310591B2 (ja) | 駆動装置 | |
| WO2023026684A1 (ja) | 給電制御装置、給電制御方法及びコンピュータプログラム | |
| WO2021210319A1 (ja) | 給電制御装置、検査方法及びコンピュータプログラム | |
| JP4352487B2 (ja) | 電気負荷の通電制御装置 | |
| JP2019165551A (ja) | モータ装置及びモータの駆動制御方法 | |
| JP7196826B2 (ja) | スイッチ装置、電流判定方法及びコンピュータプログラム | |
| JP2018182798A (ja) | 電子制御装置 | |
| WO2023112656A1 (ja) | 給電制御装置及び故障検知方法 | |
| JP2006081363A (ja) | コイル負荷駆動回路及びそれを備えた光ディスク装置 | |
| JPH09233888A (ja) | 車両用電動モータ制御装置 | |
| JP2010035275A (ja) | モータ制御装置及びモータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20220214 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20220228 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20230110 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20230123 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 7226250 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |