JP6901828B2 - 基板搬送ロボットおよび基板搬送装置 - Google Patents
基板搬送ロボットおよび基板搬送装置 Download PDFInfo
- Publication number
- JP6901828B2 JP6901828B2 JP2016036421A JP2016036421A JP6901828B2 JP 6901828 B2 JP6901828 B2 JP 6901828B2 JP 2016036421 A JP2016036421 A JP 2016036421A JP 2016036421 A JP2016036421 A JP 2016036421A JP 6901828 B2 JP6901828 B2 JP 6901828B2
- Authority
- JP
- Japan
- Prior art keywords
- elevating
- fixed
- substrate transfer
- transfer robot
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000003028 elevating effect Effects 0.000 claims description 66
- 239000000758 substrate Substances 0.000 claims description 44
- 238000002360 preparation method Methods 0.000 claims description 28
- 239000012636 effector Substances 0.000 claims description 5
- 235000012431 wafers Nutrition 0.000 description 33
- 239000004065 semiconductor Substances 0.000 description 7
- 238000011282 treatment Methods 0.000 description 7
- 239000000428 dust Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000009434 installation Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000004140 cleaning Methods 0.000 description 1
- 238000011109 contamination Methods 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 239000012535 impurity Substances 0.000 description 1
- 238000001459 lithography Methods 0.000 description 1
- 230000000149 penetrating effect Effects 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
Images












Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67766—Mechanical parts of transfer devices
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67742—Mechanical parts of transfer devices
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
- B25J11/0095—Manipulators transporting wafers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J18/00—Arms
- B25J18/02—Arms extensible
- B25J18/04—Arms extensible rotatable
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/02—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type
- B25J9/04—Programme-controlled manipulators characterised by movement of the arms, e.g. cartesian coordinate type by rotating at least one arm, excluding the head movement itself, e.g. cylindrical coordinate type or polar coordinate type
- B25J9/041—Cylindrical coordinate type
- B25J9/042—Cylindrical coordinate type comprising an articulated arm
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G47/00—Article or material-handling devices associated with conveyors; Methods employing such devices
- B65G47/74—Feeding, transfer, or discharging devices of particular kinds or types
- B65G47/90—Devices for picking-up and depositing articles or materials
- B65G47/902—Devices for picking-up and depositing articles or materials provided with drive systems incorporating rotary and rectilinear movements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65G—TRANSPORT OR STORAGE DEVICES, e.g. CONVEYORS FOR LOADING OR TIPPING, SHOP CONVEYOR SYSTEMS OR PNEUMATIC TUBE CONVEYORS
- B65G49/00—Conveying systems characterised by their application for specified purposes not otherwise provided for
- B65G49/05—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles
- B65G49/07—Conveying systems characterised by their application for specified purposes not otherwise provided for for fragile or damageable materials or articles for semiconductor wafers Not used, see H01L21/677
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67706—Mechanical details, e.g. roller, belt
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67703—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations
- H01L21/67712—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations between different workstations the substrate being handled substantially vertically
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67751—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber vertical transfer of a single workpiece
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67763—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading
- H01L21/67778—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations the wafers being stored in a carrier, involving loading and unloading involving loading and unloading of wafers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/677—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations
- H01L21/67739—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber
- H01L21/67748—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for conveying, e.g. between different workstations into and out of processing chamber horizontal transfer of a single workpiece
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Manipulator (AREA)
Description
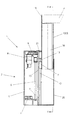
2 固定部
3 昇降部
4 基部リンク
5 固定側ケーシング(固定部用カバー)
6 ボールねじ
7 ナット部材
8 モータ
9 プーリ機構
10 ガイドレール
11 ファン
12 可動側ケーシング
13 支持部材
14 移動体
15 開口
16 ケーブル配置エリア
17 ケーブルベア
18 ケーブルベア固定端部
19 ガイドレール用カバー
20 固定側カバー
21 天井部カバー
22 側部カバー
23 ケーブルベア支持部
62A ロボットアーム
64 ロボットハンド(エンドエフェクタ)
65A 第1リンク
66A 第2リンク
101 半導体製造装置
102 フープ(FOUP)
105 フープ内空間
106 ウェハ処理装置
107 ウェハ搬送装置
111 処理空間
116 準備空間
119 アライナ
W ウェハ
Claims (5)
- 基板を保持するためのエンドエフェクタを先端部に有するロボットアームと、
前記ロボットアームを昇降させるための昇降駆動機構と、
前記昇降駆動機構を覆うためのカバー手段と、を備え、
前記昇降駆動機構は、上下方向に延在するガイドレールが設けられた固定部と、前記ガイドレールに沿って昇降駆動される昇降部と、を有し、
前記ロボットアームは、前記昇降部に旋回可能に連結された基部リンクと、前記基部リンクに旋回可能に連結され、前記先端部を含むリンク部材と、を有し、
前記カバー手段は、前記固定部に設けられ、前記昇降部がその内部を移動する固定側カバーを有し、
前記昇降部は、前記固定側カバーの開放上部を介して固定側カバーの内部に出入し、
前記固定側カバーの上端が、前記固定部の上面よりも低い位置にあり、
前記昇降部が最下点まで下降したときに、前記基部リンクの基端部の下面の高さが、前記固定部の上面の高さよりも下方であるように構成されている、ことを特徴とする基板搬送ロボット。 - 前記昇降部が最下点まで下降したときに、前記基部リンクの上面の高さが、前記固定部の上面の高さと略同一またはそれより下方であるように構成されている、請求項1記載の基板搬送ロボット。
- 前記リンク部材は、互いに旋回可能に連結された2つ以上のリンクを有する、請求項1または2に記載の基板搬送ロボット。
- 請求項1乃至3のいずれか一項に記載の基板搬送ロボットと、
前記基板搬送ロボットがその内部に設置された準備空間形成部と、を備えた基板搬送装置。 - 前記基板搬送ロボットは、前記昇降駆動機構を含む基台を有し、
前記基台は、前記準備空間形成部の内部の奥行き方向の一方に寄せて配置されている、請求項4記載の基板搬送装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016036421A JP6901828B2 (ja) | 2016-02-26 | 2016-02-26 | 基板搬送ロボットおよび基板搬送装置 |
| TW106106475A TWI643797B (zh) | 2016-02-26 | 2017-02-24 | 基板搬送機器人及基板搬送裝置 |
| CN201780013321.7A CN108698222B (zh) | 2016-02-26 | 2017-02-27 | 衬底搬送机器人及衬底搬送装置 |
| PCT/JP2017/007362 WO2017146252A1 (ja) | 2016-02-26 | 2017-02-27 | 基板搬送ロボットおよび基板搬送装置 |
| KR1020187027044A KR102205661B1 (ko) | 2016-02-26 | 2017-02-27 | 기판 반송 로봇 및 기판 반송 장치 |
| US16/079,603 US10867826B2 (en) | 2016-02-26 | 2017-02-27 | Substrate conveyance robot and substrate conveyance apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016036421A JP6901828B2 (ja) | 2016-02-26 | 2016-02-26 | 基板搬送ロボットおよび基板搬送装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017148925A JP2017148925A (ja) | 2017-08-31 |
| JP2017148925A5 JP2017148925A5 (ja) | 2019-04-11 |
| JP6901828B2 true JP6901828B2 (ja) | 2021-07-14 |
Family
ID=59686363
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016036421A Active JP6901828B2 (ja) | 2016-02-26 | 2016-02-26 | 基板搬送ロボットおよび基板搬送装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US10867826B2 (ja) |
| JP (1) | JP6901828B2 (ja) |
| KR (1) | KR102205661B1 (ja) |
| CN (1) | CN108698222B (ja) |
| TW (1) | TWI643797B (ja) |
| WO (1) | WO2017146252A1 (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017094631A1 (ja) * | 2015-11-30 | 2017-06-08 | ライフロボティクス株式会社 | 直動伸縮機構 |
| DE112017001065B4 (de) * | 2016-02-29 | 2023-04-20 | Life Robotics Inc. | Linearer aus- und einfahrmechanismus und damit ausgestatteter roboterarmmechanismus |
| JP6725640B2 (ja) * | 2016-02-29 | 2020-07-22 | ライフロボティクス株式会社 | ロボットアーム機構及び直動伸縮機構 |
| CN108883538A (zh) * | 2016-03-29 | 2018-11-23 | 生活机器人学股份有限公司 | 扭转旋转关节机构、机械臂机构及悬臂旋转机构 |
| WO2017170303A1 (ja) * | 2016-03-29 | 2017-10-05 | ライフロボティクス株式会社 | ロボットアーム機構及び回転関節装置 |
| CN111421571A (zh) * | 2019-01-09 | 2020-07-17 | 苏州吉泰兴机电设备有限公司 | 一种四轴机器人 |
| CN109703972B (zh) * | 2019-02-12 | 2024-05-14 | 合肥憬望智能科技有限公司 | 一种三站合一的自动化晶粒入料装置 |
| KR20230043223A (ko) * | 2020-09-03 | 2023-03-30 | 가와사끼 쥬고교 가부시끼 가이샤 | 기판 반송 로봇 |
| JP2022161652A (ja) * | 2021-04-09 | 2022-10-21 | 川崎重工業株式会社 | 基板搬送ロボットおよび基板搬送装置 |
| JP2022167562A (ja) * | 2021-04-23 | 2022-11-04 | 川崎重工業株式会社 | 基板搬送ロボットおよび基板搬送装置 |
| CN116352690B (zh) * | 2023-06-01 | 2023-08-22 | 沈阳芯达科技有限公司 | 一种基于大气机械手的垂直行程增程机构 |
Family Cites Families (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0650758B2 (ja) * | 1986-12-03 | 1994-06-29 | 清水建設株式会社 | 半導体ウエハカセット用移送ロボット |
| GB2198413B (en) * | 1986-11-20 | 1990-01-17 | Shimizu Construction Co Ltd | Transporting robot for semiconductor wafers |
| JP2597492Y2 (ja) * | 1993-12-24 | 1999-07-05 | 株式会社安川電機 | ロボット用ジャバラ |
| US6921467B2 (en) * | 1996-07-15 | 2005-07-26 | Semitool, Inc. | Processing tools, components of processing tools, and method of making and using same for electrochemical processing of microelectronic workpieces |
| JPH11129184A (ja) * | 1997-09-01 | 1999-05-18 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板搬入搬出装置 |
| JP2000117667A (ja) * | 1998-10-19 | 2000-04-25 | Komatsu Ltd | 円筒座標型ロボット |
| KR100594390B1 (ko) | 2000-01-28 | 2006-07-03 | 삼성전자주식회사 | 텔레스코픽 시스템을 구비한 로봇 |
| JP2002338042A (ja) * | 2001-05-15 | 2002-11-27 | Dainippon Screen Mfg Co Ltd | 基板処理装置および基板搬入搬出装置 |
| KR100630955B1 (ko) * | 2004-06-18 | 2006-10-02 | 삼성전자주식회사 | 기판 반송장치 |
| US20070020080A1 (en) * | 2004-07-09 | 2007-01-25 | Paul Wirth | Transfer devices and methods for handling microfeature workpieces within an environment of a processing machine |
| JP4579605B2 (ja) * | 2004-07-20 | 2010-11-10 | 川崎重工業株式会社 | 搬送ロボットのアーム構造 |
| US7798764B2 (en) * | 2005-12-22 | 2010-09-21 | Applied Materials, Inc. | Substrate processing sequence in a cartesian robot cluster tool |
| KR101198179B1 (ko) * | 2005-01-17 | 2012-11-16 | 삼성전자주식회사 | 핸들링 로봇의 정적 처짐 보정방법 및 장치 |
| US8573919B2 (en) * | 2005-07-11 | 2013-11-05 | Brooks Automation, Inc. | Substrate transport apparatus |
| US7896602B2 (en) * | 2006-06-09 | 2011-03-01 | Lutz Rebstock | Workpiece stocker with circular configuration |
| JP4849969B2 (ja) * | 2006-06-15 | 2012-01-11 | 東京エレクトロン株式会社 | 基板処理システムおよび基板搬送方法 |
| JP4980127B2 (ja) * | 2007-04-24 | 2012-07-18 | 川崎重工業株式会社 | 基板搬送ロボット |
| JP4753092B2 (ja) * | 2007-07-18 | 2011-08-17 | 株式会社安川電機 | 防塵機構を備えた基板搬送ロボット及びそれを備えた半導体製造装置 |
| JP5387412B2 (ja) * | 2007-11-21 | 2014-01-15 | 株式会社安川電機 | 搬送ロボット、筐体、半導体製造装置およびソータ装置 |
| CN100532026C (zh) * | 2007-12-25 | 2009-08-26 | 大连理工大学 | 一种玻璃基片传输机器人 |
| US7975568B2 (en) * | 2008-04-24 | 2011-07-12 | Asm Technology Singapore Pte Ltd | Robotic arm driving mechanism |
| US9254566B2 (en) * | 2009-03-13 | 2016-02-09 | Kawasaki Jukogyo Kabushiki Kaisha | Robot having end effector and method of operating the same |
| JP5304601B2 (ja) * | 2009-11-10 | 2013-10-02 | 株式会社安川電機 | アーム機構およびそれを備えた真空ロボット |
| JP5755842B2 (ja) * | 2010-04-22 | 2015-07-29 | 株式会社ダイヘン | ワーク搬送システム |
| US20120171002A1 (en) * | 2011-01-05 | 2012-07-05 | Electro Scientific Industries, Inc | Apparatus and method for transferring a substrate |
| JP5885528B2 (ja) * | 2012-02-14 | 2016-03-15 | 株式会社安川電機 | 搬送装置 |
| US11317971B2 (en) * | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US10224232B2 (en) * | 2013-01-18 | 2019-03-05 | Persimmon Technologies Corporation | Robot having two arms with unequal link lengths |
| JP6509487B2 (ja) * | 2013-08-09 | 2019-05-08 | 日本電産サンキョー株式会社 | 産業用ロボット |
-
2016
- 2016-02-26 JP JP2016036421A patent/JP6901828B2/ja active Active
-
2017
- 2017-02-24 TW TW106106475A patent/TWI643797B/zh active
- 2017-02-27 CN CN201780013321.7A patent/CN108698222B/zh active Active
- 2017-02-27 KR KR1020187027044A patent/KR102205661B1/ko active IP Right Grant
- 2017-02-27 WO PCT/JP2017/007362 patent/WO2017146252A1/ja active Application Filing
- 2017-02-27 US US16/079,603 patent/US10867826B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| TWI643797B (zh) | 2018-12-11 |
| WO2017146252A1 (ja) | 2017-08-31 |
| KR102205661B1 (ko) | 2021-01-21 |
| CN108698222B (zh) | 2021-11-09 |
| CN108698222A (zh) | 2018-10-23 |
| US20190054613A1 (en) | 2019-02-21 |
| US10867826B2 (en) | 2020-12-15 |
| TW201736233A (zh) | 2017-10-16 |
| KR20180116338A (ko) | 2018-10-24 |
| JP2017148925A (ja) | 2017-08-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6901828B2 (ja) | 基板搬送ロボットおよび基板搬送装置 | |
| TWI491484B (zh) | 傳送機械手 | |
| JP4283559B2 (ja) | 搬送装置及び真空処理装置並びに常圧搬送装置 | |
| JP5500206B2 (ja) | 搬送ロボットおよび搬送ロボットを備えた局所クリーン装置 | |
| WO2017154639A1 (ja) | 基板処理装置 | |
| TW200940287A (en) | Conveyance robot, locally cleaned housing with the conveyance robot, and semiconductor manufacturing device with the housing | |
| WO2016152721A1 (ja) | 基板処理装置および半導体装置の製造方法 | |
| KR102612257B1 (ko) | 수평 다관절 로봇 및 제조 시스템 | |
| JP2022074110A (ja) | キャリッジロボット及びそれを含むタワーリフト | |
| CN115066744A (zh) | 机器人以及包括机器人的基板运送系统 | |
| KR102612256B1 (ko) | 제조 시스템 | |
| JP6722459B2 (ja) | 産業用ロボット | |
| JP6296164B2 (ja) | ロボットシステムおよび搬送方法 | |
| JP5239845B2 (ja) | 基板搬送ロボット、基板搬送装置および半導体製造装置 | |
| WO2022215702A1 (ja) | 基板搬送ロボットおよび基板搬送装置 | |
| WO2022224823A1 (ja) | 基板搬送ロボットおよび基板搬送装置 | |
| JP5474328B2 (ja) | 基板搬送ロボット | |
| TW202120278A (zh) | 產業用機器人 | |
| JP5309324B2 (ja) | 基板搬送システム | |
| JP2000216214A (ja) | 基板処理装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190226 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191003 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20191128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200813 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20201011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201211 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210519 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210618 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6901828 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |