JP6465055B2 - 衝突回避支援装置、衝突回避支援方法 - Google Patents
衝突回避支援装置、衝突回避支援方法 Download PDFInfo
- Publication number
- JP6465055B2 JP6465055B2 JP2016055419A JP2016055419A JP6465055B2 JP 6465055 B2 JP6465055 B2 JP 6465055B2 JP 2016055419 A JP2016055419 A JP 2016055419A JP 2016055419 A JP2016055419 A JP 2016055419A JP 6465055 B2 JP6465055 B2 JP 6465055B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- collision avoidance
- travel
- assistance device
- collision
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title description 84
- 238000004092 self-diagnosis Methods 0.000 claims description 10
- 230000007423 decrease Effects 0.000 claims description 3
- 230000007613 environmental effect Effects 0.000 claims 3
- 230000005856 abnormality Effects 0.000 description 17
- 238000012545 processing Methods 0.000 description 11
- 230000000694 effects Effects 0.000 description 6
- 238000010586 diagram Methods 0.000 description 5
- 208000019901 Anxiety disease Diseases 0.000 description 3
- 230000036506 anxiety Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000001514 detection method Methods 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 2
- 239000004973 liquid crystal related substance Substances 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000001133 acceleration Effects 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 230000003044 adaptive effect Effects 0.000 description 1
- 230000001174 ascending effect Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 239000000446 fuel Substances 0.000 description 1
- 238000002347 injection Methods 0.000 description 1
- 239000007924 injection Substances 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/20—Conjoint control of vehicle sub-units of different type or different function including control of steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/095—Predicting travel path or likelihood of collision
- B60W30/0956—Predicting travel path or likelihood of collision the prediction being responsive to traffic or environmental parameters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/161—Decentralised systems, e.g. inter-vehicle communication
- G08G1/162—Decentralised systems, e.g. inter-vehicle communication event-triggered
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/029—Adapting to failures or work around with other constraints, e.g. circumvention by avoiding use of failed parts
- B60W2050/0297—Control Giving priority to different actuators or systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/20—Static objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
- B60W2554/4029—Pedestrians
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/09—Other types of propulsion units, e.g. fluid motors, or type not specified
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/18—Braking system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/20—Steering systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Y—INDEXING SCHEME RELATING TO ASPECTS CROSS-CUTTING VEHICLE TECHNOLOGY
- B60Y2302/00—Responses or measures related to driver conditions
- B60Y2302/05—Leading to automatic stopping of the vehicle
Description
なお、この欄及び特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本発明の技術的範囲を限定するものではない。
[1.第1実施形態]
[1−1.構成]
[1−1−1.全体構成]
図1に示す運転支援システム1は、運転支援コントローラ10と、各種センサ20と、各種ユーザインターフェース30と、ナビゲーション装置35と、を備える。また、運転支援システム1は、車内ローカルエリアネットワーク(以下「車内LAN」と称す)40を介して各種ECU50に接続されている。さらに、各種ECU50は、それぞれの制御対象60に接続されている。以下、これらの構成要素が搭載ないしは設置された主体となる車両を自車両という。
操作入力器31は、例えば、自車両のステアリングスポークに設置されたスイッチやレバー、あるいはディスプレイ32の表面に積層された周知のタッチパネル等として構成されており、各種機能に関する起動や停止、設定、変更等に係る運転者の操作内容を入力する。
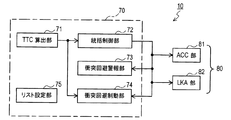
次に、運転支援コントローラ10の機能的構成について、図2のブロック図を用いて説明する。
[1−2−1.緊急制動処理]
次に、衝突回避制動部74及び統括制御部72が実行する緊急制動処理について、図3のフローチャートを用いて説明する。なお、本処理は、例えば、操作入力器31においてPCSに関する起動や停止の操作内容を入力するPCS許可スイッチ(不図示)がオンである間、所定サイクル毎に繰り返し起動される。
次に、S120において統括制御部72が実行する走行環境判定処理について、図4のフローチャートを用いて説明する。本処理は、所定サイクル毎に繰り返し実行される。
一方、S280では、統括制御部72は、S120の走行環境条件が成立していることを示す値にフラグを設定する。
次に、リスト設定部75が実行する優先順位リスト設定処理について、図5のフローチャートを用いて説明する。なお、本処理は、例えば、統括制御部72の機能に関するプログラムの実装時に起動される。
次に、S145において統括制御部72が実行する解除判定処理について、図7のフローチャートを用いて説明する。
以上詳述した第1実施形態によれば、以下の効果が得られる。
(1a)自動緊急ブレーキの作動時に衝突可能性が安全レベルまで低下した場合、自車両が停止するまで自動緊急ブレーキを継続させるパターンと、自動緊急ブレーキを解除するパターンと、のいずれか一方を、そのときの自車両の走行シーンに応じて採用するため、これら両パターンを適切に使い分けることにより、運転者に煩わしさを与えない一方、運転者に不安感も与えないようにすることができる。従って、運転者の利便性をより向上させることができる。
(8a)自動緊急ブレーキの解除後の方針に関する優先順位を規定する優先順位リストに基づいて、走行支援制御を開始させるか否かを判定する構成により、例えば走行支援機能を装備していない車両に対してもプログラムを実装することができ、システムの可用性を高めることができる。
(10a)走行支援制御を優先順位毎に示す優先順位リストに基づいて走行支援制御を選択する構成により、例えば、走行支援機能の種別にかかわらず、各種の車両にシステムを実装することができ、可用性を高めることができる。
[2−1.第1実施形態との相違点]
第2実施形態は、基本的な構成は第1実施形態と同様であるため、共通する構成については説明を省略し、相違点を中心に説明する。
[2−2−1.解除判定処理]
次に、第2実施形態の統括制御部72が、第1実施形態の解除判定処理処理(図7)に代えて実行する解除判定処理について、図8のフローチャートを用いて説明する。
次に、統括制御部72は、S520において、S510の優先順位リストに基づいて、優先順位が最も高い引継先を選択する。本実施形態の場合、優先順位リストにおいて優先順位が最も高いACCを引継先として選択し、本処理を終了する。
以上詳述した第2実施形態によれば、前述した第1実施形態の効果(1a)−(11a)に加え、以下の効果が得られる。
[3.他の実施形態]
以上、本発明の実施形態について説明したが、本発明は上記実施形態に限定されることなく、種々の形態を採り得る。
Claims (15)
- 車両の前方の対象物に前記車両が衝突する衝突可能性を判定する衝突可能性判定手段(S110)と、
前記衝突可能性判定手段による判定結果に応じて、前記対象物への衝突を回避するための緊急制動制御を開始する制動開始手段(S140)と、
前記車両が現在走行中の場所、前記車両の後方の状況、及び、前記車両の走行状態のうち、少なくとも一つに関する条件である走行環境条件が成立しているか否かを判定する走行環境判定手段(S120)と、
前記制動開始手段による前記緊急制動制御の開始から前記車両が停止するまでの間に、前記衝突可能性が所定の安全レベルまで低下した場合、前記走行環境判定手段による判定結果に応じて、前記走行環境条件が成立している場合に前記緊急制動制御を解除する制動解除手段(S170)と、
前記制動解除手段により前記緊急制動制御を解除した場合、前記車両の走行を継続するための走行支援制御を開始する走行支援開始手段(S190)と、
を備え、
前記走行環境判定手段は、前記車両の速度が所定のしきい値以上であることを、前記走行環境条件の成立要件とする、
ことを特徴とする衝突回避支援装置。 - 請求項1に記載の衝突回避支援装置であって、
前記走行支援開始手段に前記走行支援制御を開始させるか否かを判定する開始判定手段(S145)を更に備え、
前記開始判定手段は、前記車両の走行環境に応じて、前記走行支援開始手段に開始させる前記走行支援制御を選択する、
ことを特徴とする衝突回避支援装置。 - 請求項2に記載の衝突回避支援装置であって、
前記開始判定手段は、前記車両がカーブ路を走行中である場合、前記走行支援開始手段
に自動ステアリング制御を開始させる、
ことを特徴とする衝突回避支援装置。 - 車両の前方の対象物に前記車両が衝突する衝突可能性を判定する衝突可能性判定手段(S110)と、
前記衝突可能性判定手段による判定結果に応じて、前記対象物への衝突を回避するための緊急制動制御を開始する制動開始手段(S140)と、
前記車両が現在走行中の場所、前記車両の後方の状況、及び、前記車両の走行状態のうち、少なくとも一つに関する条件である走行環境条件が成立しているか否かを判定する走行環境判定手段(S120)と、
前記制動開始手段による前記緊急制動制御の開始から前記車両が停止するまでの間に、前記衝突可能性が所定の安全レベルまで低下した場合、前記走行環境判定手段による判定結果に応じて、前記走行環境条件が成立している場合に前記緊急制動制御を解除する制動解除手段(S170)と、
前記制動解除手段により前記緊急制動制御を解除した場合、前記車両の走行を継続するための走行支援制御を開始する走行支援開始手段(S190)と、
前記走行支援開始手段に前記走行支援制御を開始させるか否かを判定する開始判定手段(S145)と、
を備え、
前記開始判定手段は、前記車両の走行環境に応じて、前記走行支援開始手段に開始させる前記走行支援制御を選択するものであり、前記車両がカーブ路を走行中である場合、前記走行支援開始手段に自動ステアリング制御を開始させる、
ことを特徴とする衝突回避支援装置。 - 請求項2から請求項4までのいずれか1項に記載の衝突回避支援装置であって、
前記開始判定手段は、前記緊急制動制御の解除後の方針に関する優先順位を規定する所定の優先順位リストに基づいて、前記走行支援開始手段に前記走行支援制御を開始させるか否かを判定する、
ことを特徴とする衝突回避支援装置。 - 請求項5に記載の衝突回避支援装置であって、
前記優先順位リストは、前記走行支援制御を優先順位毎に示す情報を含み、
前記開始判定手段は、前記優先順位リストに基づいて、前記走行支援開始手段に開始させる前記走行支援制御を選択する、
ことを特徴とする衝突回避支援装置。 - 請求項5又は請求項6に記載の衝突回避支援装置であって、
前記車両のシステムに応じて、前記優先順位リストを設定する優先順位リスト設定手段(S330)、
を更に備えることを特徴とする衝突回避支援装置。 - 請求項2から請求項7までのいずれか1項に記載の衝突回避支援装置であって、
前記開始判定手段による判定結果を前記車両の運転者に報知する判定結果報知手段(S195)、
を更に備えることを特徴とする衝突回避支援装置。 - 請求項2から請求項8までのいずれか1項に記載の衝突回避支援装置であって、
前記開始判定手段は、前記車両の自己診断結果に応じて、前記走行支援開始手段に開始させる前記走行支援制御を選択する、
ことを特徴とする衝突回避支援装置。 - 請求項1から請求項9までのいずれか1項に記載の衝突回避支援装置であって、
前記走行支援制御は、自動ステアリング制御または自動パワートレイン制御である、
ことを特徴とする衝突回避支援装置。 - 請求項1から請求項10までのいずれか1項に記載の衝突回避支援装置であって、
前記走行環境判定手段は、自動車専用道路を前記車両が走行中であることを、前記走行環境条件の成立要件とする、
ことを特徴とする衝突回避支援装置。 - 請求項1から請求項11までのいずれか1項に記載の衝突回避支援装置であって、
前記走行環境判定手段は、前記車両の所定距離内に後続車両が存在することを、前記走行環境条件の成立要件とする、
ことを特徴とする衝突回避支援装置。 - 請求項1から請求項12までのいずれか1項に記載の衝突回避支援装置であって、
前記走行環境判定手段は、有料道路における自動料金収受システム対応の料金所を前記車両が通過中であることを、前記走行環境条件の成立要件とする、
ことを特徴とする衝突回避支援装置。 - 請求項1から請求項13までのいずれか1項に記載の衝突回避支援装置であって、
前記走行環境判定手段は、踏切を前記車両が横断中であることを、前記走行環境条件の成立要件とする、
ことを特徴とする衝突回避支援装置。 - 車両の前方の対象物に前記車両が衝突する衝突可能性を判定する衝突可能性判定工程(S110)と、
前記衝突可能性判定工程による判定結果に応じて、前記対象物への衝突を回避するための緊急制動制御を開始する制動開始工程(S140)と、
前記車両が現在走行中の場所、前記車両の後方の状況、及び、前記車両の走行状態のうち、少なくとも一つに関する条件である走行環境条件が成立しているか否かを判定する走行環境判定工程(S120)と、
前記制動開始工程による前記緊急制動制御の開始から前記車両が停止するまでの間に、前記衝突可能性が所定の安全レベルまで低下した場合、前記走行環境判定工程による判定結果に応じて、前記走行環境条件が成立している場合に前記緊急制動制御を解除する制動解除工程(S170)と、
前記制動解除工程により前記緊急制動制御を解除した場合、前記車両の走行を継続するための走行支援制御を開始する走行支援開始工程(S190)と、
を備え、
前記走行環境判定工程は、前記車両の速度が所定のしきい値以上であることを、前記走行環境条件の成立要件とする、
ことを特徴とする衝突回避支援装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2016/064911 WO2016186175A1 (ja) | 2015-05-19 | 2016-05-19 | 制動解除手段を備えた衝突回避支援装置および衝突回避支援方法 |
| US15/575,316 US10699578B2 (en) | 2015-05-19 | 2016-05-19 | Collision avoidance support device provided with braking release means and collision avoidance support method |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015101814 | 2015-05-19 | ||
| JP2015101814 | 2015-05-19 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016218996A JP2016218996A (ja) | 2016-12-22 |
| JP2016218996A5 JP2016218996A5 (ja) | 2017-10-19 |
| JP6465055B2 true JP6465055B2 (ja) | 2019-02-06 |
Family
ID=57578552
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016055419A Active JP6465055B2 (ja) | 2015-05-19 | 2016-03-18 | 衝突回避支援装置、衝突回避支援方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10699578B2 (ja) |
| JP (1) | JP6465055B2 (ja) |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6788977B2 (ja) * | 2016-02-23 | 2020-11-25 | 京セラ株式会社 | 車両及び車両における制御方法 |
| KR102387614B1 (ko) * | 2017-08-17 | 2022-04-15 | 엘지전자 주식회사 | 차량 운전 보조 장치 및 차량 |
| JP6962780B2 (ja) * | 2017-11-02 | 2021-11-05 | 本田技研工業株式会社 | 車両制御装置 |
| KR102485348B1 (ko) * | 2017-12-28 | 2023-01-05 | 현대자동차주식회사 | 차량 주행보조기능의 자동제어 장치 및 방법 |
| JP7008217B2 (ja) * | 2018-03-28 | 2022-01-25 | パナソニックIpマネジメント株式会社 | 異常報知装置、車両、異常報知方法、及び、プログラム |
| KR102077201B1 (ko) * | 2018-07-20 | 2020-02-13 | 현대모비스 주식회사 | 차량의 통합 제어 장치 및 방법 |
| CN113968294B (zh) * | 2018-10-11 | 2023-02-28 | 北京骑胜科技有限公司 | 控制方法、控制装置、电动车和计算机可读存储介质 |
| US11124184B2 (en) | 2018-11-09 | 2021-09-21 | Toyota Motor North America, Inc. | Real-time vehicle accident prediction, warning, and prevention |
| CN111224740B (zh) * | 2018-11-23 | 2022-03-29 | 华为技术有限公司 | 一种控制信息的发送和接收方法及终端设备 |
| DE102018130243A1 (de) * | 2018-11-29 | 2020-06-04 | Valeo Schalter Und Sensoren Gmbh | Erweitertes Szenario für Autobahnassistenten |
| JP7140077B2 (ja) | 2019-09-02 | 2022-09-21 | トヨタ自動車株式会社 | 衝突回避支援装置 |
| JP7207257B2 (ja) | 2019-10-15 | 2023-01-18 | トヨタ自動車株式会社 | 車両制御システム |
| US11364883B2 (en) * | 2020-03-27 | 2022-06-21 | Nvidia Corporation | Leveraging rear-view sensors for automatic emergency braking in autonomous machine applications |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3201094B2 (ja) * | 1993-09-16 | 2001-08-20 | 三菱自動車工業株式会社 | 車両用自動操舵装置 |
| JP4765212B2 (ja) * | 2001-07-17 | 2011-09-07 | いすゞ自動車株式会社 | 自動操舵装置 |
| JP3928512B2 (ja) * | 2002-07-26 | 2007-06-13 | 日産自動車株式会社 | 先行車追従制御装置 |
| JP2005028994A (ja) * | 2003-07-11 | 2005-02-03 | Nissan Motor Co Ltd | 車両用制動制御装置 |
| JP4738778B2 (ja) * | 2003-10-15 | 2011-08-03 | 富士通テン株式会社 | 画像処理装置、運転支援装置および運転支援システム |
| JP2006142904A (ja) * | 2004-11-17 | 2006-06-08 | Mazda Motor Corp | 車両のブレーキ制御装置 |
| DE102005046045A1 (de) * | 2005-09-27 | 2007-03-29 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Steuerung mindestens eines Objektdetektionssensors |
| JP4254821B2 (ja) | 2006-08-15 | 2009-04-15 | トヨタ自動車株式会社 | 制動制御装置 |
| JP5626578B2 (ja) | 2010-12-02 | 2014-11-19 | アイシン・エィ・ダブリュ株式会社 | 走行支援システム、走行支援プログラム、及び走行支援方法 |
| JP5715454B2 (ja) * | 2011-03-15 | 2015-05-07 | 富士重工業株式会社 | 車両の運転支援装置 |
| JP5786699B2 (ja) * | 2011-12-15 | 2015-09-30 | トヨタ自動車株式会社 | 自動ブレーキ制御装置 |
| JP5563025B2 (ja) | 2012-03-28 | 2014-07-30 | 本田技研工業株式会社 | 踏切遮断機推定装置及び車両 |
| JP6152673B2 (ja) * | 2013-03-21 | 2017-06-28 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP5842863B2 (ja) | 2013-05-14 | 2016-01-13 | 株式会社デンソー | 衝突緩和装置 |
-
2016
- 2016-03-18 JP JP2016055419A patent/JP6465055B2/ja active Active
- 2016-05-19 US US15/575,316 patent/US10699578B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20180151074A1 (en) | 2018-05-31 |
| JP2016218996A (ja) | 2016-12-22 |
| US10699578B2 (en) | 2020-06-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6465055B2 (ja) | 衝突回避支援装置、衝突回避支援方法 | |
| JP6941170B2 (ja) | 車両制御システムおよび車両制御方法 | |
| JP6677822B2 (ja) | 車両制御装置 | |
| JP6634637B2 (ja) | 車両制御システムおよび車両制御方法 | |
| JP6380766B2 (ja) | 車両制御装置、車両制御方法、および車両制御プログラム | |
| JP5888407B2 (ja) | 運転支援装置 | |
| JP2019043432A (ja) | 車両制御システム、車両制御方法、およびプログラム | |
| JP2018030479A (ja) | 車両の走行制御装置 | |
| CN110171421B (zh) | 车辆控制装置 | |
| WO2019142284A1 (ja) | 車両制御装置 | |
| JP2014041556A (ja) | 運転支援装置 | |
| JP2019160032A (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| JPWO2018230376A1 (ja) | 走行制御装置 | |
| JP7115184B2 (ja) | 自動運転システム | |
| JP6986239B2 (ja) | 車両の走行制御装置 | |
| WO2016186175A1 (ja) | 制動解除手段を備えた衝突回避支援装置および衝突回避支援方法 | |
| JP2012212271A (ja) | 運転支援装置 | |
| JP2018055321A (ja) | 運転支援方法及び運転支援装置 | |
| JP6805767B2 (ja) | 車両制御システム | |
| JP7222343B2 (ja) | 運転支援装置 | |
| JP2017073059A (ja) | 車線変更支援装置 | |
| JP6637474B2 (ja) | 走行制御装置、走行制御方法、および車両 | |
| JP7435787B2 (ja) | 経路確認装置および経路確認方法 | |
| JP2023148512A (ja) | 車両制御装置、車両制御方法、およびプログラム | |
| WO2019188218A1 (ja) | 運転支援システム、運転支援装置、運転支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170907 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170913 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180911 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181109 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20181211 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20181224 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6465055 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |