JP6301899B2 - モータのステータ及びそのステータを備えるインナーロータ型モータ - Google Patents
モータのステータ及びそのステータを備えるインナーロータ型モータ Download PDFInfo
- Publication number
- JP6301899B2 JP6301899B2 JP2015235409A JP2015235409A JP6301899B2 JP 6301899 B2 JP6301899 B2 JP 6301899B2 JP 2015235409 A JP2015235409 A JP 2015235409A JP 2015235409 A JP2015235409 A JP 2015235409A JP 6301899 B2 JP6301899 B2 JP 6301899B2
- Authority
- JP
- Japan
- Prior art keywords
- core
- hook
- terminal
- leg
- base end
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000012212 insulator Substances 0.000 claims description 42
- 230000002093 peripheral effect Effects 0.000 claims description 34
- 238000004804 winding Methods 0.000 description 12
- 238000000034 method Methods 0.000 description 5
- 238000005452 bending Methods 0.000 description 3
- 239000011248 coating agent Substances 0.000 description 3
- 238000000576 coating method Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000000465 moulding Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000000414 obstructive effect Effects 0.000 description 1
- 229910000679 solder Inorganic materials 0.000 description 1
- 238000005476 soldering Methods 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
- H02K3/522—Fastening salient pole windings or connections thereto applicable to stators only for generally annular cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/46—Fastening of windings on the stator or rotor structure
- H02K3/52—Fastening salient pole windings or connections thereto
- H02K3/521—Fastening salient pole windings or connections thereto applicable to stators only
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/12—Stationary parts of the magnetic circuit
- H02K1/14—Stator cores with salient poles
- H02K1/146—Stator cores with salient poles consisting of a generally annular yoke with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K1/00—Details of the magnetic circuit
- H02K1/06—Details of the magnetic circuit characterised by the shape, form or construction
- H02K1/22—Rotating parts of the magnetic circuit
- H02K1/27—Rotor cores with permanent magnets
- H02K1/2706—Inner rotors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K21/00—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets
- H02K21/12—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets
- H02K21/14—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures
- H02K21/16—Synchronous motors having permanent magnets; Synchronous generators having permanent magnets with stationary armatures and rotating magnets with magnets rotating within the armatures having annular armature cores with salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/04—Windings characterised by the conductor shape, form or construction, e.g. with bar conductors
- H02K3/18—Windings for salient poles
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K3/00—Details of windings
- H02K3/30—Windings characterised by the insulating material
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02K—DYNAMO-ELECTRIC MACHINES
- H02K5/00—Casings; Enclosures; Supports
- H02K5/04—Casings or enclosures characterised by the shape, form or construction thereof
- H02K5/22—Auxiliary parts of casings not covered by groups H02K5/06-H02K5/20, e.g. shaped to form connection boxes or terminal boxes
- H02K5/225—Terminal boxes or connection arrangements
Description
(1)本発明のモータのステータは、円環状を成すコア外周部と前記コア外周部から径方向内側に突出する複数のコアティース部を含むコア部と、少なくとも前記コアティース部の外周及び前記コア外周部の軸方向の端面を覆うインシュレータと、前記インシュレータを介して前記コアティース部に巻回されるコイルと、前記インシュレータを介して前記コア外周部に取付けられ、前記コイルの端部が接続される端子と、を備え、前記端子は、前記軸方向に延出する脚部と、軸方向に開放した開放端を有し、周方向で前記コアティース部に対応する位置の前記コア外周部上に配置され、前記コイルの端部が接合されるフック部と、前記脚部から前記コア外周部に沿った周方向に延出し、前記フック部に繋がる連結部と、を備え、前記インシュレータは、周方向で前記コアティース部に対応しない位置の前記コア外周部の前記端面の位置であって、前記端子の前記脚部に対応する位置に前記脚部を取付ける端子保持部を有し、前記フック部は、径方向外側に位置する基端部と、前記基端部と並ぶように径方向内側に位置する側片部と、前記開放端側と反対側に位置する前記基端部の端部及び前記側片部の端部の間を繋ぎ、閉塞端を形成する接続部と、を備え、前記フック部が前記コアティース部よりも径方向外側に位置するように、前記端子の前記連結部が曲折している。
なお、実施形態の説明の全体を通して同じ要素には同じ番号を付している。
なお、本実施形態のモータ1は、ブラシレスモータであるが、ブラシレスモータに限定される必要はない。
ロータ10は、回転軸となるシャフト11と、シャフト11に固定され、シャフト11とともに回転するロータヨーク12と、ロータヨーク12の外周面に設けられるロータマグネット13と、を備えている。
本実施形態のステータ20は、後ほど説明するコアピース21を複数用い、その複数のコアピース21を円環状に束ねた構成を有している。
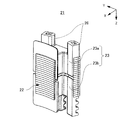
そして、各々のコアピース21は、コアピース本体22と、そのコアピース本体22の外周を覆うインシュレータ23と、を備えている。
なお、ステータ20の固定に関しては、圧入に限られるものではなく、接着固定など適宜所望の固定方法を選択すればよい。
筐体30は、ステータ20及びロータ10を収容するフレーム31と、フレーム31の開口側を塞ぐように設けられる蓋部32と、を備えている。
フレーム31は、有底カップ状であり、底部31aの中央に軸受33が収容される凹部31bが形成され、その凹部31bの底部中央には、シャフト11を外部に導出する孔が設けられている。
さらに、蓋部32には、後ほど説明する給電端子40を外部に取り出すための孔も設けられている。
本実施形態では、複数のコアピース21を用いてステータ20が構成されており、以下では、コアピース21の説明を行うとともに併せてステータ20についてのより詳細な説明を行う。
図2はステータ20のコアピース21を示す斜視図であり、図3はコアピース本体22を示す斜視図であり、図4はステータ20の斜視図であり、図5はステータ20におけるコア部27の平面図である。
なお、図2及び図4は、後ほど説明する給電端子40やコモン端子41に関連する部分が見やすいように、図1における下側を上側に位置させるように図示している。
それぞれのコアピース21は、図2に示すように、コアピース本体22と、コアピース本体22を覆うインシュレータ23と、を備えている。
したがって、そのコアピース本体22の円弧状部22aの軸方向の端面及びコアティース部22bの外周を覆うインシュレータ23は、コア部27のコアティース部22bの外周及びコア外周部27aの軸方向の端面を覆うものになっている。
つまり、インシュレータが、コア部27のコア外周部27aに沿った周方向で見て、コアティース部22bに重ならない位置のコア部27の端面上であって、給電端子40の脚部40aやコモン端子41の脚部41aに対応する位置に脚部を取付ける端子保持部26を有するものとすればよい。
図4に示すように、本実施形態のステータ20は、12個のコアピース21を円環状に結束部25で結束した10極12スロットの3相型ブラシレスモータ用のステータである。
このため、ステータ20には、各相に対応するように3つの給電端子40が取付けられるとともに、1つのコモン端子41が取り付けられている。
但し、これは一例であって、極数、スロット数及び相数などは、求められるモータに応じて変更すればよく、給電端子40やコモン端子41の数も相数に応じて変更してよい。
図6は、給電端子40を示す図であり、図6(a)は給電端子40の斜視図であり、図6(b)は図6(a)において上側から給電端子40を見た平面図である。
また、図7は、給電端子40が見える側のステータ20の一部を拡大した拡大平面図である。
なお、脚部40aは、給電端子40をステータ20に取付けるときに端子保持部26に挿入される部分であり、そのため脚部40aは、フック部40bよりも軸方向(図1のシャフト11の軸方向)の一方側に延出するように給電端子40に設けられている。
そして、コアティース部22bの径方向外側は、円弧状部22aで構成されるコア部27の円環状を成すコア外周部27aであるので、フック部40bは、コア外周部27aに沿った周方向でコアティース部22bに重なるコアティース部22bに対応する位置のコア外周部27a上に配置されている。
例えば、フック部40bの基端部40ba及び側片部40bbが、軸方向(図1のシャフト11の軸方向)の他方側に開放した開放端側から開放端の反対側の閉塞端に向かって、基端部40baと側片部40bbの間の離間距離が短くなるように傾斜させたほぼV字状であって、基端部40baの閉塞端側及び側片部40bbの閉塞端側を直接接続したような接続部40bcで構成されるようなフック部40bであってもよい。
さらに、給電端子40は、フック部40bの基端部40baの開放端から軸方向(図1のシャフト11の軸方向)に延伸する給電部40d(図6(a)参照)を有している。
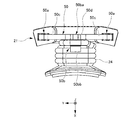
比較用の給電端子50も基本的な構成要素は、本実施形態の給電端子40と同様であるので付与する番号を50に変更して同様の構成部分について番号50に続くアルファベットを給電端子40に合わせるようにしている。
これを回避するためにフック部50bを巻線ノズルの軌道から外れる位置まで軸方向の上空に移動させるとモータサイズの肥大化につながってしまう。
また、上述のように連結部40cが基端部40baの手前で基端部40baとほぼ平行になることでフック部40bの横側にスペースを確保することができるのでコイル24の端部24aをフック部40bに引っ掛ける作業を行い易くすることができる。
そうすると、給電端子40には、図6(b)の矢印Aで示す方向に傾けようとする力(曲げ応力)がかかることになる。
したがって、本実施形態の脚部40aは、フック部40bに平行になるように脚部40aが設けられている場合よりも、格段に脚部40aが傾き難くなっている。
このように、連結部40cの部分を湾曲するようにしても、フック部40bがコイル24の巻回時に邪魔にならない位置に位置するようにすることが可能であるとともに、脚部40aを傾き難くすることが可能である。
また、フック部40bの横側にスペースを確保することができるのでコイル24の端部24aをフック部40bに引っ掛ける作業を行い易くすることができる。
つまり、フック部40b、脚部40a及び連結部40cの部分が、1つのフック部40bと、フック部40bに対応する1つの脚部40aと、脚部40aからフック部40bの基端部baに繋がる1つの連結部40cと、からなる。
そして、脚部40aと連結部40cが1つ分減るため、材料費を抑制することができる。
次に、コモン端子41を示す斜視図である図11を参照しながら、コモン端子41について説明する。
コモン端子41は、モータ1の相数に対応する数のフック部41bを有しており、上述した給電端子40に接合されるのとは反対側になるコイル24の端部が、このフック部41bに接合される。
図12に示すように、コモン端子41においてもフック部41bが設けられる部分については、給電端子40と同様の構造をしている。
このため、ステータ20の中央側とステータ20の外側とからヒュージングカシメを行うための電極をアクセスさせ、適切に給電端子40のフック部40bやコモン端子41のフック部41bに挟まれているコイル24の端部を圧縮するようにしながら電流を流し、ヒュージングカシメを行うことができる。
また、本実施形態では、インシュレータ23として図2に示したものと同じものが、全てのコアピース21に用いられており、図4を見るとわかるように、本来、給電端子40の脚部40aやコモン端子41の脚部41a及び脚部41daを取付ける必要のないところにも、端子保持部26が設けられたものになっているが、このような端子保持部26は不要であることから、省略してもよい。
つまり、本発明に係るモータ1は、本発明に係るステータ20の内側に回転可能に配置するロータを備えさせたインナーロータ型モータである。
Claims (8)
- 円環状を成すコア外周部と前記コア外周部から径方向内側に突出する複数のコアティース部を含むコア部と、
少なくとも前記コアティース部の外周及び前記コア外周部の軸方向の端面を覆うインシュレータと、
前記インシュレータを介して前記コアティース部に巻回されるコイルと、
前記インシュレータを介して前記コア外周部に取付けられ、前記コイルの端部が接続される端子と、を備え、
前記端子は、
前記軸方向に延出する脚部と、
軸方向に開放した開放端を有し、周方向で前記コアティース部に対応する位置の前記コア外周部上に配置され、前記コイルの端部が接合されるフック部と、
前記脚部から前記コア外周部に沿った周方向に延出し、前記フック部に繋がる連結部と、を備え、
前記インシュレータは、周方向で前記コアティース部に対応しない位置の前記コア外周部の前記端面の位置であって、前記端子の前記脚部に対応する位置に前記脚部を取付ける端子保持部を有し、
前記フック部は、
径方向外側に位置する基端部と、
前記基端部と並ぶように径方向内側に位置する側片部と、
前記開放端側と反対側に位置する前記基端部の端部及び前記側片部の端部の間を繋ぎ、閉塞端を形成する接続部と、を備え、
前記フック部が前記コアティース部よりも径方向外側に位置するように、前記端子の前記連結部が曲折しているモータのステータ。 - 前記コア部は複数のコアピース本体を有し、
前記コアピース本体は、
円環状を成す前記コア外周部の一部となるように円状に配置される円弧状部と、
前記円弧状部の周方向のほぼ中央に位置し、前記円弧状部から径方向内側に突出する前記コアティース部と、を備え、
前記インシュレータは、前記コアピース本体の前記コアティース部の外周及び前記コア外周部の前記端面を成す前記円弧状部の端面を覆うように、それぞれの前記コアピース本体に設けられ、
前記端子保持部は、前記円弧状部の前記端面を覆う前記インシュレータの前記円弧状部に沿った周方向外側に位置している請求項1に記載のモータのステータ。 - 前記端子は、前記フック部の前記基端部から軸方向に延伸する給電部を有する給電端子であり、
前記端子は、
前記フック部が間に位置するように設けられる一対の前記脚部と、
一対の前記脚部のそれぞれから前記フック部の前記基端部に繋がる一対の前記連結部と、を備え、
一対の前記連結部は、それぞれの前記脚部から前記基端部に近づく方向に傾斜して径方向外側に伸びた後、前記基端部の手前で前記基端部とほぼ平行になることで前記フック部が前記コアティース部よりも径方向外側に位置するように曲折している請求項1又は請求項2に記載のモータのステータ。 - 前記端子は、前記フック部の前記基端部から軸方向に延伸する給電部を有する給電端子であり、
前記端子は、
前記フック部が間に位置するように設けられる一対の前記脚部と、
一対の前記脚部のそれぞれから前記フック部の前記基端部に繋がる一対の前記連結部と、を備え、
一対の前記連結部は、それぞれの前記脚部から前記基端部に向かって径方向外側に湾曲して前記フック部が前記コアティース部よりも径方向外側に位置するように曲折している請求項1又は請求項2に記載のモータのステータ。 - 前記端子は、前記フック部の前記基端部から軸方向に延伸する給電部を有する給電端子であり、
前記端子は、
前記フック部に対応する1つの前記脚部と、
前記脚部から前記フック部の前記基端部に繋がる前記連結部と、を備え、
前記連結部は、前記脚部から前記基端部に近づく方向に傾斜して径方向外側に伸びた後、前記基端部の手前で前記基端部とほぼ平行になることで前記フック部が前記コアティース部よりも径方向外側に位置するように曲折している請求項1又は請求項2に記載のモータのステータ。 - 前記端子は、モータの相数に対応する数の前記フック部を有するコモン端子であり、
前記端子は、
前記フック部が間に位置するように前記各フック部ごとに設けられる一対の前記脚部と、
一対の前記脚部から対応する前記フック部の前記基端部に繋がる一対の前記連結部と、
前記フック部間に位置する前記脚部同士を繋げる架橋部と、を備え、
前記架橋部は、前記コアティース部上に位置しないように配置され、
一対の前記連結部は、それぞれの前記脚部から対応する前記フック部の前記基端部に近づく方向に傾斜して径方向外側に伸びた後、対応する前記フック部の前記基端部の手前で対応する前記フック部の前記基端部とほぼ平行になることで前記フック部が前記コアティース部よりも径方向外側に位置するように曲折している請求項1又は請求項2に記載のモータのステータ。 - 前記端子は、さらに、前記架橋部で繋げられている前記各脚部の隣に位置するように、前記架橋部に設けられる脚部を備えている請求項6に記載のモータのステータ。
- 請求項1から請求項7のいずれか1項に記載のモータのステータと、
前記ステータの径方向内側に回転可能に配置されるロータと、を備えるインナーロータ型モータ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015235409A JP6301899B2 (ja) | 2015-12-02 | 2015-12-02 | モータのステータ及びそのステータを備えるインナーロータ型モータ |
| US15/354,318 US10236740B2 (en) | 2015-12-02 | 2016-11-17 | Stator of motor and inner rotor-type motor including stator |
| DE102016122534.7A DE102016122534A1 (de) | 2015-12-02 | 2016-11-22 | Stator für einen Motor sowie ein Innenläufermotor mit dem Stator |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015235409A JP6301899B2 (ja) | 2015-12-02 | 2015-12-02 | モータのステータ及びそのステータを備えるインナーロータ型モータ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017103913A JP2017103913A (ja) | 2017-06-08 |
| JP6301899B2 true JP6301899B2 (ja) | 2018-03-28 |
Family
ID=58722828
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015235409A Active JP6301899B2 (ja) | 2015-12-02 | 2015-12-02 | モータのステータ及びそのステータを備えるインナーロータ型モータ |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10236740B2 (ja) |
| JP (1) | JP6301899B2 (ja) |
| DE (1) | DE102016122534A1 (ja) |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6710180B2 (ja) * | 2017-05-31 | 2020-06-17 | ミネベアミツミ株式会社 | モータ |
| KR102300149B1 (ko) * | 2017-08-03 | 2021-09-10 | 미쓰비시덴키 가부시키가이샤 | 고정자, 전동기, 밀폐형 압축기 및 고정자의 제조 방법 |
| FR3074376B1 (fr) * | 2017-11-29 | 2020-12-18 | Valeo Equip Electr Moteur | Connecteur de phase electrique pour stator de machine electrique tournante |
| DE102018202624A1 (de) | 2018-02-21 | 2019-08-22 | Bayerische Motoren Werke Aktiengesellschaft | Rotor sowie Verfahren zum Herstellen eines Rotors |
| KR102022005B1 (ko) * | 2018-07-20 | 2019-09-18 | 디와이오토 주식회사 | 절연 홀더와 전기 터미널의 조립 구조가 개선된 브러시리스 모터 장치 |
| KR102608163B1 (ko) * | 2018-08-21 | 2023-11-30 | 엘지이노텍 주식회사 | 스테이터 및 이를 포함하는 모터 |
| CN109245376A (zh) * | 2018-10-31 | 2019-01-18 | 东莞市安域实业有限公司 | 具有一体镶嵌成型五金塑胶件的马达 |
| KR102642285B1 (ko) | 2018-11-29 | 2024-02-28 | 밀워키 일렉트릭 툴 코포레이션 | 전기모터를 위한 모터 권선 구성 |
| KR102080033B1 (ko) * | 2018-12-21 | 2020-02-24 | 삼성전자주식회사 | 모터와 그 제조 방법 및 이를 포함하는 청소기 |
| US11616411B2 (en) * | 2019-12-16 | 2023-03-28 | Nidec Motor Corporation | Overlapped end caps for stator core |
| CN113014013B (zh) * | 2019-12-20 | 2023-06-09 | 新疆金风科技股份有限公司 | 转子支架、转子、电机及风力发电机组 |
| JP2022102075A (ja) * | 2020-12-25 | 2022-07-07 | 日本電産サンキョー株式会社 | モータ、およびポンプ装置 |
| JP2022102076A (ja) | 2020-12-25 | 2022-07-07 | 日本電産サンキョー株式会社 | モータ、およびポンプ装置 |
| US11855521B2 (en) | 2021-02-02 | 2023-12-26 | Black & Decker, Inc. | Brushless DC motor for a body-grip power tool |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2888142B2 (ja) * | 1993-11-08 | 1999-05-10 | 三菱電機株式会社 | 回転電動機並びにその製造方法 |
| US6121711A (en) * | 1993-11-08 | 2000-09-19 | Mitsubishi Denki Kabushiki Kaisha | Rotary motor and production method thereof, and laminated core and production method thereof |
| JP3568364B2 (ja) * | 1996-09-30 | 2004-09-22 | 松下電器産業株式会社 | 回転電機のコア |
| JP2002010552A (ja) * | 2000-06-26 | 2002-01-11 | Asmo Co Ltd | 回転磁界型電動機 |
| WO2002019498A1 (fr) * | 2000-08-29 | 2002-03-07 | Mitsubishi Denki Kabushiki Kaisha | Noyau de stator a empilement, moteur rotatif et procedes de production correspondants |
| JP2003047215A (ja) * | 2001-08-03 | 2003-02-14 | Moric Co Ltd | 回転界磁型電気機器の電機子巻線方法および装置 |
| JP2008118792A (ja) * | 2006-11-06 | 2008-05-22 | Jtekt Corp | 電動モータ及びバスバー端子構造 |
| KR100911832B1 (ko) * | 2007-05-31 | 2009-08-13 | 주식회사 아모텍 | 고효율 슬림형 진공흡입장치 및 이를 이용한 로봇 청소기 |
| JP2009033786A (ja) * | 2007-07-24 | 2009-02-12 | Mabuchi Motor Co Ltd | バスバーを内蔵したインナーロータブラシレスモータ |
| WO2009031204A1 (ja) * | 2007-09-04 | 2009-03-12 | Mitsui High-Tec, Inc. | 積層鉄心及びその製造方法 |
| CN102549881B (zh) * | 2009-11-19 | 2014-03-05 | 三菱电机株式会社 | 旋转电机的模制定子的制造方法 |
| KR101243468B1 (ko) * | 2011-08-17 | 2013-03-13 | 뉴모텍(주) | 매그메이트 홀더를 갖는 스테이터 어셈블리 |
| JP6006937B2 (ja) * | 2011-12-27 | 2016-10-12 | 株式会社ミツバ | ブラシレスモータ及びブラシレスモータ製造方法 |
| JP5801216B2 (ja) * | 2012-02-06 | 2015-10-28 | 愛三工業株式会社 | モータ及び電動ポンプ |
| JP5960541B2 (ja) * | 2012-08-03 | 2016-08-02 | アスモ株式会社 | 巻線の溶接構造、端子及びステータ |
| JP5952701B2 (ja) | 2012-10-04 | 2016-07-13 | ミネベア株式会社 | モータのステータ構造、ブラシレスモータ、およびモータのステータ構造の製造方法 |
| JP6126859B2 (ja) * | 2013-02-14 | 2017-05-10 | 本田技研工業株式会社 | 回転電機のロータ |
| JP6058164B2 (ja) * | 2013-12-24 | 2017-01-11 | 三菱電機株式会社 | 回転電機 |
| KR102233276B1 (ko) * | 2014-01-06 | 2021-03-29 | 엘지이노텍 주식회사 | 모터의 정류자 및 이를 포함하는 모터 |
-
2015
- 2015-12-02 JP JP2015235409A patent/JP6301899B2/ja active Active
-
2016
- 2016-11-17 US US15/354,318 patent/US10236740B2/en active Active
- 2016-11-22 DE DE102016122534.7A patent/DE102016122534A1/de active Pending
Also Published As
| Publication number | Publication date |
|---|---|
| US20170163118A1 (en) | 2017-06-08 |
| JP2017103913A (ja) | 2017-06-08 |
| US10236740B2 (en) | 2019-03-19 |
| DE102016122534A1 (de) | 2017-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6301899B2 (ja) | モータのステータ及びそのステータを備えるインナーロータ型モータ | |
| JP5847543B2 (ja) | バスバーユニットおよびブラシレスモータ | |
| JP4868147B2 (ja) | アキシャルエアギャップ型電動機 | |
| TWI431902B (zh) | A stator and a rotating motor using it | |
| JP5016969B2 (ja) | 回転電機の配電部品 | |
| KR101741658B1 (ko) | 회전 전기 기기용 스테이터 | |
| JP6058164B2 (ja) | 回転電機 | |
| JP2008125278A (ja) | アキシャルエアギャップ型電動機 | |
| WO2018151133A1 (ja) | ブラシレスモータ | |
| JP2017188981A (ja) | ステータ、その製造方法、およびブラシレスモータ | |
| WO2015107791A1 (ja) | ステータコイル、アキシャルギャップ型回転電機及びその製造方法 | |
| JP2014207785A (ja) | モータ | |
| JP2012105372A (ja) | 外転型の電動機 | |
| JP2005328654A (ja) | ターミナル及びブラシレスモータ | |
| US11025106B2 (en) | Stator winding for motor | |
| JP2016046867A (ja) | 回転電機ステータ | |
| JP2018125898A (ja) | 回転電機 | |
| JP2012253978A (ja) | 回転電機の固定子及びその製造方法 | |
| JP6926893B2 (ja) | 回転電機 | |
| JP5952571B2 (ja) | インシュレータ、及び回転電機 | |
| JP2006136089A (ja) | ブラシレスモータ及びブラシレスモータの製造方法 | |
| JP4676919B2 (ja) | クローポール型ブラシレスモータのステータ及びクローポール型ブラシレスモータ | |
| JP6276148B2 (ja) | 回転電機ステータ | |
| JP2003348782A (ja) | 固定子、固定子の製造方法およびモータ | |
| JP4971417B2 (ja) | ステータ及びブラシレスモータ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170406 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180220 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180301 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6301899 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |