JP5825519B2 - 操舵装置 - Google Patents
操舵装置 Download PDFInfo
- Publication number
- JP5825519B2 JP5825519B2 JP2011283514A JP2011283514A JP5825519B2 JP 5825519 B2 JP5825519 B2 JP 5825519B2 JP 2011283514 A JP2011283514 A JP 2011283514A JP 2011283514 A JP2011283514 A JP 2011283514A JP 5825519 B2 JP5825519 B2 JP 5825519B2
- Authority
- JP
- Japan
- Prior art keywords
- steering
- nut
- stopper
- operation member
- screw shaft
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 55
- 230000002093 peripheral effect Effects 0.000 description 26
- 238000003780 insertion Methods 0.000 description 16
- 230000037431 insertion Effects 0.000 description 16
- 230000002159 abnormal effect Effects 0.000 description 11
- 230000005856 abnormality Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 238000005452 bending Methods 0.000 description 1
- 230000013011 mating Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/008—Changing the transfer ratio between the steering wheel and the steering gear by variable supply of energy, e.g. by using a superposition gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D15/00—Steering not otherwise provided for
- B62D15/02—Steering position indicators ; Steering position determination; Steering aids
- B62D15/021—Determination of steering angle
- B62D15/0215—Determination of steering angle by measuring on the steering column
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D5/00—Power-assisted or power-driven steering
- B62D5/001—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup
- B62D5/005—Mechanical components or aspects of steer-by-wire systems, not otherwise provided for in this maingroup means for generating torque on steering wheel or input member, e.g. feedback
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Power Steering Mechanism (AREA)
- Steering Control In Accordance With Driving Conditions (AREA)
- Steering Controls (AREA)
Description
このようなステアバイワイヤ式の操舵装置では、回転操作部材の回転を検出する構成が重要であり、この構成に異常が生じてしまうと、操舵用アクチュエータが正常であっても、操舵不能になってしまう。回転操作部材の回転を検出する構成として、特許文献1では角度センサが1つしか設けられていないのだが、特許文献2の舵取装置では、当該構成の冗長化を図るために、メインの操舵角センサとバックアップ用の操舵角センサとが設けられている。そのため、特許文献2の舵取装置では、メインの操舵角センサの異常時においても、バックアップ用の操舵角センサによって操舵を継続できる。
この発明は、かかる背景のもとでなされたもので、操舵角センサの異常時においても操舵を継続できる構成を、部品点数増加やコスト上昇を回避しつつ実現できるステアバイワイヤ式の操舵装置を提供することを目的とする。
請求項3記載の発明は、前記ナットから突設され、前記ストッパに当接する当接凸部(71)を含むことを特徴とする、請求項2記載の操舵装置である。
請求項5記載の発明は、前記ストッパに設けられ、前記歪センサが取り付けられており、弾性変形可能な取付部(72)を含むことを特徴とする、請求項2〜4のいずれかに記載の操舵装置である。
つまり、操舵角センサの異常時においても操舵を継続できる構成を、部品点数増加やコスト上昇を回避しつつ実現できる。
請求項3記載の発明によれば、ナットの当接凸部がストッパに当接することによってストッパが相対的に大きく撓むことから、歪センサ(当接検出手段)は、ストッパとナットとの当接を高精度に検出できる。
請求項5記載の発明によれば、ナットがストッパに当接すると、ストッパでは取付部が相対的に大きく撓むことから、取付部に取り付けられた歪センサ(当接検出手段)は、取付部の撓みに基づいて、ストッパとナットとの当接を高精度に検出できる。
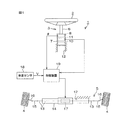
図1は、本発明の一実施形態における操舵装置1の概略構成を示す模式図である。図1を参照して、操舵装置1は、車両に適用される。操舵装置1は、ステアリングホイール等の回転可能な操作部材2を含む操作機構3と、操作部材2の操舵に基づいて車輪4を転舵させる転舵機構5とを有している。操舵装置1は、いわゆるステアバイワイヤ式の操舵装置であって、操作機構3と転舵機構5とが機械的に非連結となっている。
回転軸6は、操作部材2に固定されている。これにより、操作部材2および回転軸6は、回転軸6の軸中心周りに一体回転可能である。そのため、操作部材2を回転操作したときの角度(「操舵角度」ということにする)は、回転軸6の回転角度と等しい。
操舵角センサ8は、たとえばレゾルバやロータリーエンコーダー等であって、回転軸6の回転角度(つまり、操作部材2の操舵角度θ)を検出する。ここでの回転角度(操舵角度)は、回転軸6および操作部材2の回転量(操作部材2の操舵量)と、回転方向(操作部材2の操舵方向)とを含むベクトルである。操舵角センサ8は、ハウジング7に収容されている。
操舵方向検出ユニット11は、操作部材2の操舵方向のみを検出するものであり、以降で詳説する。
転舵軸13は、車体12の幅方向(車幅方向であり、図1では左右方向)に延びる軸状体である。
ハウジング14は、車幅方向に延びる中空体であり、その中空部分に転舵軸13が挿通されている。この状態で、転舵軸13の軸方向(車幅方向と同じ)における両端部は、ハウジング14からはみ出している。そして、転舵軸13は、車幅方向にスライド可能である。
ナックルアーム16は、各タイロッド15において転舵軸13に連結された側とは反対側の端部に連結されている。ナックルアーム16に対して車輪4が連結されている。
転舵アクチュエータ17は、一例として、電動モータ(図示せず)と、この電動モータの駆動力(電動モータの出力軸の回転力)を転舵軸13の軸方向のスライドに変換するボールねじ装置(図示せず)とを含む。転舵アクチュエータ17の電動モータ(図示せず)が駆動力を発生すると、転舵軸13が車幅方向にスライドし、このスライドが転舵軸13の軸方向両端部のタイロッド15に伝達されることで、ナックルアーム16が回動し、車輪4の転舵が達成される。
また、操舵装置1は、車速Vを検出する車速センサ18と、操舵角センサ8や操舵方向検出ユニット11や車速センサ18の検出信号が入力される制御装置19とをさらに含んでいる。制御装置19は、ECU(Electronic Control Unit)とも呼ばれ、マイクロコンピュータで構成されている。
図2は、操舵装置1から操作機構3を抜き出して示した模式的な断面図である。図3は、操作機構3の要部の分解斜視図である。
ねじシャフト40は、軸状体であって、回転軸6に対して同軸状で連結されている。ねじシャフト40と回転軸6とは一体形成されていてもよいし、分離可能であってもよい。ねじシャフト40は、回転軸6に近い側から順に、第1ねじ形成部45、第1支持部46、第2ねじ形成部47および第2支持部48を一体的に有している。
第1支持部46の外周面は、凹凸のない円周面である。第1支持部46は、第1ねじ形成部45とほぼ同径である。
第2ねじ形成部47は、第1支持部46よりも少し大径である。そのため、第2ねじ形成部47において第1支持部46に隣接する端部には、段付き51が形成されている。第2ねじ形成部47の外周面には、ねじ部52が形成されている。なお、ねじ部52は、第2ねじ形成部47の外周面の全域に形成されていなくてもよい。図2では、第2ねじ形成部47の外周面において段付き51周辺の領域には、ねじ部52が形成されていない。
ねじシャフト40は、ハウジング7の一端開口20および他端開口21に挿通された状態でハウジング7に部分的に収容されている。また、ねじシャフト40は、ハウジング7内のホルダ27の開口30および軸挿通孔32に挿通された状態でホルダ27に部分的に収容されている。このとき、ねじシャフト40は、ハウジング7およびホルダ27のそれぞれに対して同軸状になっている。そのため、ねじシャフト40(回転軸6)の軸方向は、前述した軸方向Jと同じである。
ここで、第1ねじ形成部45のねじ部49に対して、環状の位置決めナット54が径方向外側から螺合しており、位置決めナット54は、軸受26に対してハウジング7の外側から当接している。位置決めナット54は、ねじシャフト40の一部とみなすことができる。軸受26は、位置決めナット54および段付き51によって軸方向Jにおける両側から挟持されることで、ねじシャフト40に対して位置決めされている。
第2支持部48は、ホルダ27の中空部分に配置されている。第2支持部48において第2ねじ形成部47側の端部は、前述した軸受34に対して内嵌されている。ここで、軸受34は、第2ねじ形成部47において第2支持部48側の段付き53とホルダ27の端壁29における位置決め凸部33とによって軸方向Jにおける両側から挟持されることで、ねじシャフト40に対して位置決めされている。
なお、図2では、説明の便宜上、ストッパ43の断面に相当する部分に、右下に延びるハッチングを付している。また、図3では、説明の便宜上、ナットガイド42を実際よりも長くなるように誇張して示している。
そして、図2を参照して、ナット41の各挿通孔56に挿通されたナットガイド42は、軸方向Jにおける挿通孔56の両側に位置する各ストッパ43に固定されている。そのため、ストッパ43は、ナットガイド42の長手方向(軸方向Jでもある)の両端に1つずつ設けられていて、ナットガイド42の長手方向における一端側および他端側を保持している。これにより、ナットガイド42がナット41の挿通孔56に挿通された状態が維持されている。
当接検出センサ70は、歪センサ(歪ゲージ)74を含んでいる。歪センサ74は、各ストッパ43に1つずつ設けられており、詳しくは、ストッパ43における取付部72の凹部75の底(取付部72において薄くて歪みやすい部分)に1つずつ取り付けられている。
図4を参照して、当接検出センサ70は、抵抗R1、R2、R3およびR4を含むブリッジ回路76を含む。このブリッジ回路76では、抵抗R1および抵抗R3が直列接続されていて、抵抗R2および抵抗R4が直列接続されていて、抵抗R1および抵抗R3の直列接続部分と抵抗R2および抵抗R4の直列接続部分とが並列接続されている。このようなブリッジ回路76を含む当接検出センサ70は、制御装置19に対して電気的に接続されている。
E=(R1・R3−R2・R4)/(R1+R2)・(R3+R4)
この実施形態では、1対のストッパ43のうち、一方(図2における右側)のストッパ43の歪センサ74が、抵抗R1であり、他方(図2における左側)のストッパ43の歪センサ74が、抵抗R2である。いずれかの歪センサ74が圧縮または引張された場合にのみ、出力電力Eが発生する。
つまり、操舵角センサ8の異常時においても操舵を継続できる構成を、部品点数増加やコスト上昇を回避しつつ実現し、操舵装置1の冗長性を確保できる。
この発明は、以上に説明した実施形態に限定されるものではなく、請求項記載の範囲内において種々の変更が可能である。
Claims (5)
- 操舵するための操作部材を含む操作機構と、前記操作機構とは機械的に非連結であって、前記操作部材の操舵に基づいて車輪を転舵させる転舵機構とを有する操舵装置であって、
前記操作機構は、
前記操作部材の操舵角度を検出する操舵角センサと、
前記操作部材の操舵方向のみを検出する操舵方向検出手段とを含み、
前記操舵方向検出手段は、
前記操作部材の操舵方向に回転可能なねじシャフトと、
前記ねじシャフトに螺合するナットと、
前記ねじシャフトと平行に配置され、前記ねじシャフトの回転に伴って前記ナットをねじシャフトの軸方向に沿って移動させるナットガイドと、
前記ナットガイドの長手方向の少なくとも一端側に設けられ、前記ナットが前記軸方向に所定位置以上移動することを規制するストッパと、
前記ストッパと前記ナットとの当接を検出する当接検出手段とを含むことを特徴とする、操舵装置。 - 前記当接検出手段は、前記ストッパに設けられ、前記ナットの当接を検出する歪センサを含むことを特徴とする、請求項1記載の操舵装置。
- 前記ナットから突設され、前記ストッパに当接する当接凸部を含むことを特徴とする、請求項2記載の操舵装置。
- 前記歪センサは、前記ストッパにおいて前記ナットに対向する面とは反対側の面に設けられていることを特徴とする、請求項2または3記載の操舵装置。
- 前記ストッパに設けられ、前記歪センサが取り付けられており、弾性変形可能な取付部を含むことを特徴とする、請求項2〜4のいずれかに記載の操舵装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011283514A JP5825519B2 (ja) | 2011-12-26 | 2011-12-26 | 操舵装置 |
| US13/721,743 US8662240B2 (en) | 2011-12-26 | 2012-12-20 | Steering system |
| EP12198843.0A EP2610131B1 (en) | 2011-12-26 | 2012-12-21 | Steering system |
| CN201210564389.3A CN103171618B (zh) | 2011-12-26 | 2012-12-21 | 操纵转向装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011283514A JP5825519B2 (ja) | 2011-12-26 | 2011-12-26 | 操舵装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013132949A JP2013132949A (ja) | 2013-07-08 |
| JP2013132949A5 JP2013132949A5 (ja) | 2015-01-22 |
| JP5825519B2 true JP5825519B2 (ja) | 2015-12-02 |
Family
ID=47631211
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011283514A Expired - Fee Related JP5825519B2 (ja) | 2011-12-26 | 2011-12-26 | 操舵装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8662240B2 (ja) |
| EP (1) | EP2610131B1 (ja) |
| JP (1) | JP5825519B2 (ja) |
| CN (1) | CN103171618B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101944338B1 (ko) * | 2017-07-27 | 2019-01-31 | 주식회사 만도 | 조향휠 회전제한장치 |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6115757B2 (ja) * | 2012-02-17 | 2017-04-19 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP5871164B2 (ja) * | 2012-03-02 | 2016-03-01 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP6020885B2 (ja) * | 2012-06-07 | 2016-11-02 | 株式会社ジェイテクト | 車両用操舵装置 |
| JP2017004099A (ja) | 2015-06-05 | 2017-01-05 | 株式会社東海理化電機製作所 | 回転操作装置 |
| KR102637038B1 (ko) * | 2017-02-17 | 2024-02-15 | 에이치엘만도 주식회사 | 스토퍼 구조체 및 이를 구비한 스티어 바이 와이어식 조향 시스템 |
| KR102660330B1 (ko) * | 2017-02-23 | 2024-04-24 | 에이치엘만도 주식회사 | 조향휠 회전제한장치 |
| DE102018131204B3 (de) * | 2018-08-30 | 2020-01-02 | Schaeffler Technologies AG & Co. KG | Reibvorrichtung für einen Feedback-Aktuator einer Lenkeinrichtung |
| DE102019101614A1 (de) * | 2019-01-23 | 2020-07-23 | Trw Automotive Gmbh | Sensoreinheit, Lenkradbaugruppe, Zahnstangenbaugruppe sowie Lenksystem |
| US11273867B2 (en) | 2020-01-10 | 2022-03-15 | Honda Motor Co., Ltd. | Steering angle sensor assembly and steering gearbox for a vehicle including same |
| JP7375565B2 (ja) * | 2020-01-15 | 2023-11-08 | 株式会社ジェイテクト | ステアリング装置 |
| JP2022142864A (ja) * | 2021-03-17 | 2022-10-03 | トヨタ自動車株式会社 | 車両用パワーステアリング装置 |
| JP2023117733A (ja) * | 2022-02-14 | 2023-08-24 | 日立Astemo株式会社 | 操舵操作入力装置 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3639940B2 (ja) | 1997-04-08 | 2005-04-20 | 光洋精工株式会社 | 自動車の舵取装置 |
| JP2001114123A (ja) * | 1999-10-20 | 2001-04-24 | Koyo Seiko Co Ltd | 車両用操舵装置 |
| FR2813644B1 (fr) | 2000-09-06 | 2003-01-24 | Skf France | Dispositif de palier a roulement instrumente, notamment pour volant de commande |
| NL1018627C2 (nl) * | 2001-07-25 | 2003-01-28 | Skf Ab | Stuureenheid voor besturing via draad. |
| JP4581660B2 (ja) * | 2004-12-02 | 2010-11-17 | 日産自動車株式会社 | 車両用操舵装置 |
| JP4984504B2 (ja) * | 2005-11-29 | 2012-07-25 | 日産自動車株式会社 | 車両用操舵制御装置 |
| JP2010163016A (ja) * | 2009-01-15 | 2010-07-29 | Ntn Corp | ステアバイワイヤ式操舵装置 |
| US9281415B2 (en) * | 2010-09-10 | 2016-03-08 | The Board Of Trustees Of The Leland Stanford Junior University | Pressure sensing apparatuses and methods |
| JP5697966B2 (ja) | 2010-12-20 | 2015-04-08 | Ntn株式会社 | ステアバイワイヤの操舵反力制御装置 |
| CN102167077A (zh) * | 2011-03-18 | 2011-08-31 | 华南理工大学 | 一种汽车主动转向器 |
-
2011
- 2011-12-26 JP JP2011283514A patent/JP5825519B2/ja not_active Expired - Fee Related
-
2012
- 2012-12-20 US US13/721,743 patent/US8662240B2/en not_active Expired - Fee Related
- 2012-12-21 CN CN201210564389.3A patent/CN103171618B/zh not_active Expired - Fee Related
- 2012-12-21 EP EP12198843.0A patent/EP2610131B1/en not_active Not-in-force
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR101944338B1 (ko) * | 2017-07-27 | 2019-01-31 | 주식회사 만도 | 조향휠 회전제한장치 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8662240B2 (en) | 2014-03-04 |
| CN103171618A (zh) | 2013-06-26 |
| CN103171618B (zh) | 2016-12-07 |
| US20130161117A1 (en) | 2013-06-27 |
| EP2610131A1 (en) | 2013-07-03 |
| EP2610131B1 (en) | 2016-02-24 |
| JP2013132949A (ja) | 2013-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5825519B2 (ja) | 操舵装置 | |
| JP5822091B2 (ja) | 操舵装置 | |
| JP5811402B2 (ja) | 操舵装置 | |
| JP5880954B2 (ja) | 車両用操舵装置 | |
| JP6020893B2 (ja) | 電動パワーステアリング装置 | |
| US9086269B2 (en) | Steering angle sensor and electric power steering device employing the same | |
| JP5871164B2 (ja) | 車両用操舵装置 | |
| JP5861576B2 (ja) | ハンドル装置 | |
| JP5979408B2 (ja) | 車両用操舵装置 | |
| JP2008074218A (ja) | ステアリング装置 | |
| JP5062467B2 (ja) | ステアリング装置 | |
| JP2012086799A (ja) | 電動パワーステアリング装置 | |
| JP2015096408A (ja) | 車両用操舵装置 | |
| US20220281515A1 (en) | Steer by wire type steering apparatus | |
| JP2013252804A (ja) | 車両用操舵装置 | |
| JP2008222049A (ja) | ステアリング装置 | |
| JP5704055B2 (ja) | 車両操舵装置 | |
| JP2016007984A (ja) | 電動パワーステアリング装置 | |
| TWI540092B (zh) | 操縱裝置 | |
| JP5765568B2 (ja) | 車両用操舵装置 | |
| KR20230021932A (ko) | 스티어 바이 와이어식 조향장치 | |
| KR20230046437A (ko) | 스티어 바이 와이어식 조향장치 | |
| JP2011131723A (ja) | ステアリング装置 | |
| JP2007256186A (ja) | トルクセンサ | |
| JP2010047112A (ja) | 車両用操舵装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150821 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150930 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5825519 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |