JP5716680B2 - 先行車両選択装置および車間制御装置 - Google Patents
先行車両選択装置および車間制御装置 Download PDFInfo
- Publication number
- JP5716680B2 JP5716680B2 JP2012002344A JP2012002344A JP5716680B2 JP 5716680 B2 JP5716680 B2 JP 5716680B2 JP 2012002344 A JP2012002344 A JP 2012002344A JP 2012002344 A JP2012002344 A JP 2012002344A JP 5716680 B2 JP5716680 B2 JP 5716680B2
- Authority
- JP
- Japan
- Prior art keywords
- probability
- vehicle
- preceding vehicle
- host vehicle
- inter
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/10—Path keeping
- B60W30/12—Lane keeping
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N5/00—Computing arrangements using knowledge-based models
- G06N5/02—Knowledge representation; Symbolic representation
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18145—Cornering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/02—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to ambient conditions
- B60W40/06—Road conditions
- B60W40/072—Curvature of the road
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/02—Systems using reflection of radio waves, e.g. primary radar systems; Analogous systems
- G01S13/06—Systems determining position data of a target
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0257—Control of position or course in two dimensions specially adapted to land vehicles using a radar
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
- G05D1/021—Control of position or course in two dimensions specially adapted to land vehicles
- G05D1/0287—Control of position or course in two dimensions specially adapted to land vehicles involving a plurality of land vehicles, e.g. fleet or convoy travelling
- G05D1/0291—Fleet control
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N7/00—Computing arrangements based on specific mathematical models
- G06N7/01—Probabilistic graphical models, e.g. probabilistic networks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/30—Road curve radius
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Theoretical Computer Science (AREA)
- Mathematical Physics (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Computing Systems (AREA)
- Software Systems (AREA)
- Evolutionary Computation (AREA)
- Data Mining & Analysis (AREA)
- Aviation & Aerospace Engineering (AREA)
- Computational Mathematics (AREA)
- Mathematical Analysis (AREA)
- Mathematical Optimization (AREA)
- Pure & Applied Mathematics (AREA)
- Algebra (AREA)
- Probability & Statistics with Applications (AREA)
- Computer Networks & Wireless Communication (AREA)
- Computational Linguistics (AREA)
- Electromagnetism (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Description
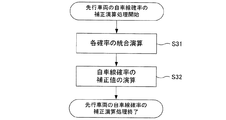
本発明の先行車両選択装置は、自車両の前方を走行する前方車両が前記自車両と同一の車線である自車線上を走行する確率である自車線確率に基づいて、前記前方車両から前記自車線上を走行する先行車両を選択する先行車両選択装置であって、前記自車両の前方に存在する道路に設けられた物体の検出信号であり、前記自車両の前方に存在する曲率を有する前記道路であるカーブ路の存在確率の算出に用いられる第1検出信号を出力する走査型センサである第1検出部、出力されてから経過した時間の異なる前記先行車両の位置に関する検出信号であり、前記先行車両の軌跡を求める演算処理に用いられる第2検出信号を出力する走査型センサである第2検出部、および、前記自車両のヨーレートの検出信号であり、前記カーブ路の存在確率の算出に用いられる第3検出信号を出力するヨーレートセンサである第3検出部のうち少なくとも前記第2検出部を含む2つから出力される検出信号を取得する取得部と、前記自車両の前方に前記カーブ路が存在する確率であって、前記第1検出信号に基づく第1確率、前記第2検出信号に基づく第2確率、および、前記第3検出信号に基づく第3確率のうち少なくとも前記第2確率を含む2つを算出するとともに、算出された前記第1確率、前記第2確率、および、前記第3確率のうち少なくとも前記第2確率を含む2つを統合した統合確率を算出することにより前記自車両の前方に前記カーブ路が存在する確率を求める第1演算部と、前記自車両の予想される走行ラインと所定の期間内の複数の異なる時点における前記先行車両の位置である軌跡との距離に基づいて前記自車線確率を算出すると共に、前記統合確率を用いて前記自車線確率の補正処理を行う第2演算部と、が設けられていることを特徴とする。
走査型センサによって自車両の前方道路の状況を検出したり、前方車両の軌跡を検出したりすることにより、例えば自車両前方の映像を解析して自車両の前方道路の状況等を検出する方法と比較して、自車両の前方道路の状況等を検出する際の演算処理量を抑制することができる。さらに、映像解析を用いる方法と比較して、自車両の周囲の環境による影響、例えば太陽光が検出部に直接入射することにより上述の検出が困難になる等の影響を受けにくく、安定して自車両の前方道路の状況等を検出することができる。
第3検出部としてヨーレートセンサを用いて自車両がカーブ路に進入したことを検出すること、言い換えると、カーブ路に進入したことによる自車両の旋回(ヨーレート)をヨーレートセンサで検出することにより、自車両がカーブ路に進入したことを確実に検出することができる。さらに、ステアリングの舵角および自車両の車速に基づいて自車両のヨーレートを検出する方法と比較して、直接にヨーレートを検出するため第3検出部の構成を小型化することができる。
このようにすることで、自車両が先行車両を追従している場合にのみ、言い換えると先行車両を選択する必要がある場合にのみ自車線確率の補正処理が行われる。そのため、第2演算部における不必要な演算処理が行われることを抑制することができる。
I/Oインターフェース15には、自車両の前方を走行する先行車両などの位置を検出する走査型センサであるレーダーセンサ(第1検出部、第2検出部)31、自車両における旋回方向への回転角の変化する速度を検出するヨーレートセンサ(第3検出部)32、自車両の車輪の回転速度を検出することにより自車両の走行速度を検出する車輪速度センサ33、車間制御コントローラ1による制御の許可または不許可を入力する許可スイッチ34、車間制御コントローラ1における制御モードの選択を行う選択スイッチ35からそれぞれの信号が入力されるように構成されている。
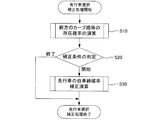
車間制御コントローラ1の制御対象物選択部10は、自車両の運転者がACCシステムを利用して先行車両の後方を所定の車両間隔をあけて、所定の走行速度で自動追従を行う制御を開始させると、図2に示すように、自車両の前方のカーブ路等の存在確率を求める演算処理を開始する(S10)。
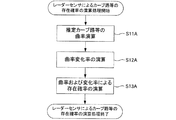
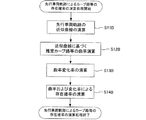
制御対象物選択部10のカーブ確率演算部11は、レーダーセンサ31から出力された検出信号から、自車両の前方に存在するカーブ路等に関する検出信号(例えば道路標識やガードレール等からの反射電波に係る検出信号)を抽出し、抽出した検出信号に基づいて自車両の前方に存在するカーブ路等を推定する演算処理を実行し、演算により求められた推定カーブ路等の曲率を演算処理によって求める(S11A)。
カーブ確率演算部11は、レーダーセンサ31の検出信号のうち、先行車両の位置に関する検出信号に基づいて、先行車両の軌跡の近似曲線を演算処理によって求める(S11B)。具体的には、レーダーセンサ31から出力されてから経過した時間の異なる先行車両の位置に関する検出信号、言い換えると、記憶部14に記憶されている検出信号、に基づいて所定期間内の複数の異なる時点における先行車両の位置である軌跡が演算により求められ、求められた軌跡から近似曲線が演算処理により求められる。なお、近似曲線は、先行車両の軌跡との距離が最小になる曲線であればよく、その求め方を限定するものではない。
カーブ確率演算部11は、自車両のヨーレートを検出したヨーレートセンサ32から出力された検出信号に対して、不要な信号などであるノイズを除去するフィルタ補正処理を行う(S11C)。ヨーレートの検出信号に対するフィルタ補正が終わると、カーブ確率演算部11は、自車両の位置における推定カーブ路等の曲率を求める演算処理を行う(S12C)。具体的には、ヨーレートの検出信号に基づいて、自車両前方のカーブ路等を推定する演算処理が行われ、求められた推定カーブ路等の曲率を求める演算処理が行われる。
(Y1)自車両の走行速度が所定の閾値以上であること。
(Y2)先行車両が存在すること。
(Y3)先行車両に追従している時間が所定の閾値以上であること。
(Y4)先行車両との間の車間距離がある閾値以上に設定されていること。
(N1)自車両の走行速度が所定の閾値未満であること。
(N2)先行車両が存在しないこと。
(N3)先行車両に追従している時間が所定の閾値未満であること。
(N4)先行車両との間の車間距離がある閾値未満に設定されていること。
本実施形態では、式(1)に示すように、存在確率PSns、PTraj、PYawに対する重み付けが等しい例に適用して説明しているが、存在確率PSnsに対する重み付け<存在確率PTrajに対する重み付け<存在確率PYawに対する重み付け、の順位に重み付けに差を設けてもよく、特に限定するものではない。
ここで、補正前の自車線確率PProbは、自車両の予想走行ラインと先行車両の走行軌跡との間のオフセット量、および、記憶部14に予め記憶された確率マップに基づいて求められる確率である。なお、自車両の予想走行ラインは、自車両がこれから走行すると推定される走行ラインであり、オフセット量は、自車両と先行車両との間の所定位置における、予想走行ラインと先行車両の走行軌跡の近似曲線との間の最短距離、言い換えると車両進行方向に対する横方向のズレ量のことである。
Claims (4)
- 自車両の前方を走行する前方車両が前記自車両と同一の車線である自車線上を走行する確率である自車線確率に基づいて、前記前方車両から前記自車線上を走行する先行車両を選択する先行車両選択装置であって、
前記自車両の前方に存在する道路に設けられた物体の検出信号であり、前記自車両の前方に存在する曲率を有する前記道路であるカーブ路の存在確率の算出に用いられる第1検出信号を出力する走査型センサである第1検出部、出力されてから経過した時間の異なる前記先行車両の位置に関する検出信号であり、前記先行車両の軌跡を求める演算処理に用いられる第2検出信号を出力する走査型センサである第2検出部、および、前記自車両のヨーレートの検出信号であり、前記カーブ路の存在確率の算出に用いられる第3検出信号を出力するヨーレートセンサである第3検出部のうち少なくとも前記第2検出部を含む2つから出力される検出信号を取得する取得部と、
前記自車両の前方に前記カーブ路が存在する確率であって、前記第1検出信号に基づく第1確率、前記第2検出信号に基づく第2確率、および、前記第3検出信号に基づく第3確率のうち少なくとも前記第2確率を含む2つを算出するとともに、
算出された前記第1確率、前記第2確率、および、前記第3確率のうち少なくとも前記第2確率を含む2つを統合した統合確率を算出することにより前記自車両の前方に前記カーブ路が存在する確率を求める第1演算部と、
前記自車両の予想される走行ラインである予想走行ラインと所定の期間内の複数の異なる時点における前記先行車両の位置である軌跡との距離に基づいて前記自車線確率を算出すると共に、前記統合確率を用いて前記自車線確率の補正処理を行う第2演算部と、
が設けられていることを特徴とする先行車両選択装置。 - 前記第2演算部は、前記自車両が前記先行車両を追従していると判定された場合に、前記自車線確率の補正処理を行うことを特徴とする請求項1記載の先行車両選択装置。
- 前記第1演算部は、前記第1確率、前記第2確率および前記第3確率のうち少なくとも前記第2確率を含む2つに対して重み付けをした統合演算を行い、
前記第1確率、前記第2確率および前記第3確率に対する重み付けの軽重は、第1確率の重み付け<第2確率の重み付け<第3確率の重み付け、であることを特徴とする請求項1または2に記載の先行車両選択装置。 - 車両に搭載され、自車両の前方を走行する前方車両のうち、前記自車両と同一の車線上を走行する先行車両に対して前記自車両が追従している場合に、前記自車両と前記先行車両との間の車間距離を制御する車間制御装置であって、
請求項1から3のいずれかに記載の先行車両選択装置と、
該先行車両選択装置により選択された前記先行車両から、前記自車両までの前記車間距離に基づいて、前記自車両の走行速度を制御することにより、前記車間距離を所定の範囲内に制御する制御部と、
が設けられていることを特徴とする車間制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012002344A JP5716680B2 (ja) | 2012-01-10 | 2012-01-10 | 先行車両選択装置および車間制御装置 |
| US13/676,402 US9015100B2 (en) | 2012-01-10 | 2012-11-14 | Preceding-vehicle identifying apparatus and following-distance control apparatus |
| KR1020120129285A KR101428674B1 (ko) | 2012-01-10 | 2012-11-15 | 선행 차량 식별 장치 및 추종 거리 제어 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2012002344A JP5716680B2 (ja) | 2012-01-10 | 2012-01-10 | 先行車両選択装置および車間制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013142975A JP2013142975A (ja) | 2013-07-22 |
| JP5716680B2 true JP5716680B2 (ja) | 2015-05-13 |
Family
ID=48744648
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012002344A Expired - Fee Related JP5716680B2 (ja) | 2012-01-10 | 2012-01-10 | 先行車両選択装置および車間制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9015100B2 (ja) |
| JP (1) | JP5716680B2 (ja) |
| KR (1) | KR101428674B1 (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5605381B2 (ja) * | 2012-02-13 | 2014-10-15 | 株式会社デンソー | クルーズ制御装置 |
| JP5962193B2 (ja) * | 2012-05-09 | 2016-08-03 | 株式会社デンソー | 車両光源検出装置および車両光源検出プログラム |
| DE102013216994B4 (de) * | 2013-08-27 | 2025-11-06 | Robert Bosch Gmbh | Geschwindigkeitsassistent für ein Kraftfahrzeug |
| JP6131813B2 (ja) * | 2013-10-03 | 2017-05-24 | 株式会社デンソー | 先行車選択装置 |
| JP5949721B2 (ja) * | 2013-10-10 | 2016-07-13 | 株式会社デンソー | 先行車選択装置 |
| HK1231516A1 (zh) | 2014-01-14 | 2017-12-22 | 崔元哲 | Luterial和用於其分离及培养的方法 |
| JP6040945B2 (ja) * | 2014-02-14 | 2016-12-07 | 株式会社デンソー | 先行車選択装置 |
| JP2016018256A (ja) * | 2014-07-04 | 2016-02-01 | 株式会社デンソー | 分岐合流判定装置 |
| JP6413479B2 (ja) * | 2014-08-22 | 2018-10-31 | 株式会社アドヴィックス | 車両制御装置 |
| JP6363519B2 (ja) * | 2015-01-21 | 2018-07-25 | 株式会社デンソー | 車両制御装置 |
| JP6536064B2 (ja) * | 2015-02-10 | 2019-07-03 | 株式会社デンソー | 走行軌跡選定装置、走行軌跡選定方法 |
| CN112923936B (zh) * | 2015-02-10 | 2023-04-18 | 御眼视觉技术有限公司 | 用于车辆的导航系统、方法及计算机可读介质 |
| JP6396850B2 (ja) * | 2015-05-29 | 2018-09-26 | 株式会社デンソー | 運転支援装置及び運転支援方法 |
| US11066070B2 (en) | 2015-10-15 | 2021-07-20 | Hyundai Motor Company | Apparatus and method for controlling speed in cooperative adaptive cruise control system |
| KR101728323B1 (ko) * | 2015-10-15 | 2017-05-02 | 현대자동차주식회사 | 차량, 및 그 제어방법 |
| JP6706196B2 (ja) * | 2016-12-26 | 2020-06-03 | 株式会社デンソー | 走行制御装置 |
| WO2019092656A1 (en) * | 2017-11-10 | 2019-05-16 | C.R.F. Societa' Consortile Per Azioni | Adjusting the longitudinal motion control of a host motor vehicle based on the estimation of the travel trajectory of a leading motor vehicle |
| KR102055156B1 (ko) | 2018-02-05 | 2019-12-12 | 주식회사 만도 | 적응형 순항 제어 시스템의 제어 장치 및 제어 방법 |
| CN109263653B (zh) * | 2018-11-14 | 2020-08-11 | 江铃汽车股份有限公司 | 一种汽车驾驶员前视野角度确认方法 |
| US11807259B2 (en) * | 2020-11-30 | 2023-11-07 | Nuro, Inc. | Hardware systems for an autonomous vehicle |
| CN113916242B (zh) * | 2021-12-14 | 2022-03-25 | 腾讯科技(深圳)有限公司 | 车道定位方法和装置、存储介质及电子设备 |
| CN114419758B (zh) * | 2022-01-24 | 2023-04-07 | 广州小鹏自动驾驶科技有限公司 | 跟车距离的计算方法、装置、车辆及存储介质 |
| WO2024122485A1 (ja) * | 2022-12-07 | 2024-06-13 | 日立Astemo株式会社 | 車両制御装置、車両制御方法、及び車両制御システム |
| KR20240145189A (ko) | 2023-03-27 | 2024-10-07 | 현대자동차주식회사 | 차량용 객체 인지 방법 및 객체 인지 장치 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6662642B2 (en) * | 2000-09-08 | 2003-12-16 | Automotive Technologies International, Inc. | Vehicle wireless sensing and communication system |
| JP3232724B2 (ja) * | 1992-12-08 | 2001-11-26 | 株式会社デンソー | 車間距離制御装置 |
| JP3569926B2 (ja) * | 1993-03-03 | 2004-09-29 | 株式会社デンソー | 車両走行制御装置 |
| US7103460B1 (en) * | 1994-05-09 | 2006-09-05 | Automotive Technologies International, Inc. | System and method for vehicle diagnostics |
| US7426437B2 (en) * | 1997-10-22 | 2008-09-16 | Intelligent Technologies International, Inc. | Accident avoidance systems and methods |
| US7672756B2 (en) * | 1995-06-07 | 2010-03-02 | Automotive Technologies International, Inc. | Vehicle communications using the internet |
| US5652705A (en) * | 1995-09-25 | 1997-07-29 | Spiess; Newton E. | Highway traffic accident avoidance system |
| JP3516841B2 (ja) | 1997-07-25 | 2004-04-05 | トヨタ自動車株式会社 | 自車線物体検出装置及びこれを備えた車両走行制御装置 |
| JP3427815B2 (ja) * | 2000-03-30 | 2003-07-22 | 株式会社デンソー | 先行車選択方法及び装置、記録媒体 |
| JP2001319299A (ja) * | 2000-05-12 | 2001-11-16 | Denso Corp | 車両用道路曲率推定装置、先行車選択装置 |
| JP2001328451A (ja) * | 2000-05-18 | 2001-11-27 | Denso Corp | 進行路推定装置、先行車認識装置、及び記録媒体 |
| US6662108B2 (en) * | 2002-01-07 | 2003-12-09 | Ford Global Technologies, Llc | Method and apparatus for improving a vehicle safety system using a transponder and GPS |
| JP3975922B2 (ja) | 2003-01-17 | 2007-09-12 | トヨタ自動車株式会社 | カーブ半径推定装置 |
| JP4561507B2 (ja) * | 2005-07-08 | 2010-10-13 | 株式会社デンソー | 道路形状認識装置 |
| TW201100280A (en) * | 2009-06-19 | 2011-01-01 | Automotive Res & Testing Ct | Collision warning system for vehicle |
-
2012
- 2012-01-10 JP JP2012002344A patent/JP5716680B2/ja not_active Expired - Fee Related
- 2012-11-14 US US13/676,402 patent/US9015100B2/en not_active Expired - Fee Related
- 2012-11-15 KR KR1020120129285A patent/KR101428674B1/ko not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2013142975A (ja) | 2013-07-22 |
| KR20130082060A (ko) | 2013-07-18 |
| KR101428674B1 (ko) | 2014-08-08 |
| US20130179379A1 (en) | 2013-07-11 |
| US9015100B2 (en) | 2015-04-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5716680B2 (ja) | 先行車両選択装置および車間制御装置 | |
| JP5522157B2 (ja) | 先行車判定装置および車間制御装置 | |
| CN103702883B (zh) | 用于运行机动车的进行纵向引导的驾驶员辅助系统的方法和机动车 | |
| CN107004367B (zh) | 车辆的行驶控制装置以及行驶控制方法 | |
| JP5949721B2 (ja) | 先行車選択装置 | |
| CN104517465B (zh) | 前方车辆选择设备 | |
| JP6363519B2 (ja) | 車両制御装置 | |
| JP6540465B2 (ja) | 運転支援装置 | |
| JP6040945B2 (ja) | 先行車選択装置 | |
| JP6131813B2 (ja) | 先行車選択装置 | |
| JP2019096177A (ja) | 車群制御装置 | |
| WO2014064831A1 (ja) | 運転支援装置及び運転支援方法 | |
| JP6307853B2 (ja) | 車線変更支援装置 | |
| KR20140083723A (ko) | Scc 장치 및 이에 적용되는 타겟 차량 차선 판별 방법 | |
| CN107850444A (zh) | 行驶控制装置的控制方法及行驶控制装置 | |
| JP2017136897A (ja) | 車両走行制御装置 | |
| JP6481627B2 (ja) | 車両用走行制御装置 | |
| JP6497329B2 (ja) | 車両用走行制御装置 | |
| JP2010091317A (ja) | レーダ装置 | |
| JP2012153296A (ja) | 走行制御装置 | |
| JP6379510B2 (ja) | 運転診断装置および保険料算定方法 | |
| JP7175344B1 (ja) | 車両制御装置、車両制御システム、車両制御方法及び車両制御プログラム | |
| JP4919849B2 (ja) | 車載用レーダ装置 | |
| KR102044192B1 (ko) | 차선폭 보정 장치 및 방법과 이를 이용한 차량 스마트 크루즈 컨트롤 시스템 | |
| JP5682302B2 (ja) | 走行道路推定装置、方法およびプログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20131119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140311 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150217 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150302 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5716680 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |