JP5605127B2 - 軸トルク制御装置 - Google Patents
軸トルク制御装置 Download PDFInfo
- Publication number
- JP5605127B2 JP5605127B2 JP2010215210A JP2010215210A JP5605127B2 JP 5605127 B2 JP5605127 B2 JP 5605127B2 JP 2010215210 A JP2010215210 A JP 2010215210A JP 2010215210 A JP2010215210 A JP 2010215210A JP 5605127 B2 JP5605127 B2 JP 5605127B2
- Authority
- JP
- Japan
- Prior art keywords
- shaft torque
- dynamometer
- drive motor
- torque
- command value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images













Landscapes
- Testing Of Engines (AREA)
- Control Of Position Or Direction (AREA)
- Control Of Electric Motors In General (AREA)
Description
ただし、Ki:積分係数、T12r:軸トルク指令値、T12:軸トルク検出値、Kp:比例係数、Kd:微分係数、a1、a2:比例・微分要素のフィルタ係数
さらに、特許文献1では、エンジンと動力計の結合シャフトが非線形バネ特性をもつ場合、共振周波数が軸トルクの大きさによって変化するのを補償できるよう、軸トルク制御器のPID制御の積分、比例、微分の各要素の係数(積分係数Ki、比例係数Kp、微分係数Kd、フィルタ係数a1,a2)を軸トルク検出値T12を基に自動調整できるようにしている。
前記駆動モータに対するトルク外乱を外乱オブザーバにより推定して該駆動モータのトルク指令値にフィードバックする駆動モータの加速度制御系と、
前記駆動モータの軸トルク指令値と軸トルク検出値との偏差を比例積分演算して該駆動モータの加速度指令値を得る比例積分制御系と、
前記駆動モータの軸トルク検出値を共振比制御理論に基づいて決定したゲインで該駆動モータの加速度指令値にフィードバックする手段と、
前記駆動モータの速度検出値を所定のゲインで該駆動モータの加速度指令値にフィ−ドバックする手段と、
を備えたことを特徴とする。
前記動力計に対するトルク外乱を外乱オブザーバにより推定して該動力計のトルク指令値にフィードバックする駆動モータの加速度制御系と、
前記動力計の軸トルク指令値と軸トルク検出値との偏差を比例積分演算して該動力計の加速度指令値を得る比例積分制御系と、
前記動力計の軸トルク検出値を共振比制御理論に基づいて決定したゲインで該動力計の加速度指令値にフィードバックする手段と、
前記動力計の速度検出値を所定のゲインで該動力計の加速度指令値にフィ−ドバックする手段と、
を備えたことを特徴とする。
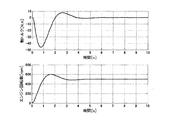
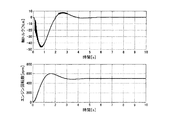
図1は動力計の軸トルク制御装置の構成を示し、エンジンベンチシステムに適用した場合である。50は、図11に示すエンジンベンチシステムの2慣性系機械モデルであり、エンジンのアイドル回転数制御要素50Aと、クラッチの非線形特性要素50Bを含めた機械モデルとし、エンジンが回転数制御され、エンジンからガタをもつクラッチを介して動力計に軸結合したシステムの軸トルク制御を可能とする。
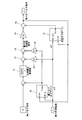
図1に示す軸トルク制御器10Aは、軸トルク指令(T12r)と軸トルク検出値(T12)と動力計回転数検出値(ω2)を基に動力計トルク指令を求める。ここで、軸トルク制御器10Aは、図2に示すブロック構成とする。図2において、外乱オブザーバ21は、動力計の慣性モーメントJmに回転数ω2を疑似微分した加速度(dω2/dt)を乗じてトルクJm(dω2/dt)を求め、このトルクJm(dω2/dt)と動力計トルク指令Trefから動力計の外乱トルク(エンジンのアイドル回転により動力計に発生するトルク)を推定し、そのトルクTdismを動力計トルク指令にフィードバックすることにより動力計の加速度制御系を構成し、軸トルク振動を抑制した軸トルク制御を得る。
図6は図1における軸トルク制御器10Aのブロック構成を示す。図6のブロック構成が図2の構成と異なる部分は、軸トルク検出器が適用できないシステムに適用する場合、軸トルクメータ5による軸トルク検出に代えて、軸トルクオブザーバ30により軸トルクを推定する点にある。
2 クラッチ
5 軸トルクメータ
6 動力計
7 回転数検出器
8 エンジン制御器
10 動力計制御器
10A 軸トルク制御器
11 インバータ
21 外乱オブザーバ
22 軸トルク検出器
23 比例積分制御器
26,28 係数器
30 軸トルクオブザーバ
50 エンジンベンチシステムの機械モデル
Claims (4)
- 負荷側モータと駆動モータを軸結合した機械系と、前記負荷側モータの回転数制御と前記駆動モータの軸トルク制御を行う制御系とを備えた2慣性系または2慣性系に近似可能な動力システムの軸トルク制御装置であって、
前記駆動モータに対するトルク外乱を外乱オブザーバにより推定して該駆動モータのトルク指令値にフィードバックする駆動モータの加速度制御系と、
前記駆動モータの軸トルク指令値と軸トルク検出値との偏差を比例積分演算して該駆動モータの加速度指令値を得る比例積分制御系と、
前記駆動モータの軸トルク検出値を共振比制御理論に基づいて決定したゲインで該駆動モータの加速度指令値にフィードバックする手段と、
前記駆動モータの速度検出値を所定のゲインで該駆動モータの加速度指令値にフィ−ドバックする手段と、
を備えたことを特徴とする軸トルク制御装置。 - 前記駆動モータが軸トルク検出器をもたない場合、該駆動モータの回転数とトルク指令値とから軸トルクオブザーバで推定して前記軸トルク検出値とすることを特徴とする請求項1に記載の軸トルク制御装置。
- エンジンと動力計を軸結合した機械系と、前記エンジンの回転数制御と前記動力計の軸トルク制御を行う制御系とを備えた2慣性系または2慣性系に近似可能なエンジンベンチシステムの軸トルク制御装置であって、
前記動力計に対するトルク外乱を外乱オブザーバにより推定して該動力計のトルク指令値にフィードバックする駆動モータの加速度制御系と、
前記動力計の軸トルク指令値と軸トルク検出値との偏差を比例積分演算して該動力計の加速度指令値を得る比例積分制御系と、
前記動力計の軸トルク検出値を共振比制御理論に基づいて決定したゲインで該動力計の加速度指令値にフィードバックする手段と、
前記動力計の速度検出値を所定のゲインで該動力計の加速度指令値にフィ−ドバックする手段と、
を備えたことを特徴とする軸トルク制御装置。 - 前記動力計が軸トルク検出器をもたない場合、該動力計の回転数とトルク指令値とから軸トルクオブザーバで推定して前記軸トルク検出値とすることを特徴とする請求項3に記載の軸トルク制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010215210A JP5605127B2 (ja) | 2010-09-27 | 2010-09-27 | 軸トルク制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010215210A JP5605127B2 (ja) | 2010-09-27 | 2010-09-27 | 軸トルク制御装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012068199A JP2012068199A (ja) | 2012-04-05 |
| JP2012068199A5 JP2012068199A5 (ja) | 2013-10-24 |
| JP5605127B2 true JP5605127B2 (ja) | 2014-10-15 |
Family
ID=46165638
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010215210A Active JP5605127B2 (ja) | 2010-09-27 | 2010-09-27 | 軸トルク制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5605127B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016133377A (ja) * | 2015-01-19 | 2016-07-25 | 株式会社明電舎 | ダイナモメータシステムの制御装置 |
| WO2017082143A1 (ja) * | 2015-11-09 | 2017-05-18 | 株式会社明電舎 | ダイナモメータシステムのダイナモ制御装置及びそのエンジン始動方法 |
| WO2018190303A1 (ja) * | 2017-04-14 | 2018-10-18 | 株式会社明電舎 | 電気慣性制御装置 |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102799192A (zh) * | 2012-08-14 | 2012-11-28 | 中国科学院国家天文台南京天文光学技术研究所 | 用于天文望远镜的非线性干扰模拟与检测控制系统 |
| JP6107294B2 (ja) * | 2013-03-26 | 2017-04-05 | 株式会社明電舎 | 各輪独立駆動台車の制御装置 |
| CN103969048B (zh) * | 2014-02-18 | 2016-12-07 | 潍柴动力股份有限公司 | 一种工况点选择方法及装置 |
| JP2017034936A (ja) * | 2015-08-05 | 2017-02-09 | 国立大学法人長岡技術科学大学 | モータ制御装置、モータ装置、及びモータ制御方法 |
| KR102118184B1 (ko) * | 2018-01-10 | 2020-06-02 | 서울과학기술대학교 산학협력단 | 외란 관측기를 이용한 기계 부하의 강인한 에뮬레이션 방법 및 장치 |
| JP6962893B2 (ja) * | 2018-10-04 | 2021-11-05 | 株式会社神戸製鋼所 | 振動抑制装置、振動抑制方法及びプログラム |
| CN113624500B (zh) * | 2021-07-28 | 2024-03-01 | 广西玉柴机器股份有限公司 | 一种柴油机排放故障扭矩限制计时加速方法及系统 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2737064B2 (ja) * | 1991-10-08 | 1998-04-08 | 東洋電機製造株式会社 | 制御装置 |
| JPH06217579A (ja) * | 1993-01-12 | 1994-08-05 | Fuji Electric Co Ltd | 電動機制御装置 |
| JP3339246B2 (ja) * | 1994-04-04 | 2002-10-28 | 株式会社明電舎 | 低慣性化制御による2慣性共振系の振動抑制装置 |
| JPH09121580A (ja) * | 1995-10-26 | 1997-05-06 | Meidensha Corp | 低慣性化制御による2慣性共振系の振動抑制装置 |
| JP3687305B2 (ja) * | 1997-09-30 | 2005-08-24 | 株式会社明電舎 | ダイナモメータシステム |
| JP4151401B2 (ja) * | 2002-12-19 | 2008-09-17 | 株式会社安川電機 | サーボ制御装置 |
| JP4655677B2 (ja) * | 2005-02-28 | 2011-03-23 | シンフォニアテクノロジー株式会社 | 動力伝達系の試験装置とその制御方法 |
| JP5084232B2 (ja) * | 2006-02-03 | 2012-11-28 | Juki株式会社 | 位置決め装置の同期防振制御装置 |
| JP4784451B2 (ja) * | 2006-09-12 | 2011-10-05 | 株式会社明電舎 | エンジンベンチシステムの制御方法とその装置 |
| JP2008145354A (ja) * | 2006-12-12 | 2008-06-26 | Toyota Motor Corp | エンジン試験方法、及び、試験装置 |
| JP2008203052A (ja) * | 2007-02-20 | 2008-09-04 | Meidensha Corp | エンジンベンチシステムの制御装置 |
| JP4788656B2 (ja) * | 2007-05-16 | 2011-10-05 | 株式会社明電舎 | 動力試験システム |
| JP5141378B2 (ja) * | 2008-05-28 | 2013-02-13 | 株式会社明電舎 | 動力計の電気慣性制御方式 |
| WO2010024195A1 (ja) * | 2008-08-26 | 2010-03-04 | 株式会社明電舎 | 電動機の外乱抑圧装置および外乱抑圧方法 |
| JP5245668B2 (ja) * | 2008-09-18 | 2013-07-24 | 株式会社明電舎 | エンジンベンチシステムの制御方式 |
-
2010
- 2010-09-27 JP JP2010215210A patent/JP5605127B2/ja active Active
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016133377A (ja) * | 2015-01-19 | 2016-07-25 | 株式会社明電舎 | ダイナモメータシステムの制御装置 |
| WO2016117394A1 (ja) * | 2015-01-19 | 2016-07-28 | 株式会社明電舎 | ダイナモメータシステムの制御装置 |
| US10371589B2 (en) | 2015-01-19 | 2019-08-06 | Meidensha Corporation | Control device for dynamometer system |
| WO2017082143A1 (ja) * | 2015-11-09 | 2017-05-18 | 株式会社明電舎 | ダイナモメータシステムのダイナモ制御装置及びそのエンジン始動方法 |
| JP2017090195A (ja) * | 2015-11-09 | 2017-05-25 | 株式会社明電舎 | ダイナモメータシステムのダイナモ制御装置及びそのエンジン始動方法 |
| US10190944B2 (en) | 2015-11-09 | 2019-01-29 | Meidensha Corporation | Dynamometer-system dynamo control device and engine starting method therefor |
| WO2018190303A1 (ja) * | 2017-04-14 | 2018-10-18 | 株式会社明電舎 | 電気慣性制御装置 |
| JP2018179802A (ja) * | 2017-04-14 | 2018-11-15 | 株式会社明電舎 | 電気慣性制御装置 |
| US10895511B2 (en) | 2017-04-14 | 2021-01-19 | Meidensha Corporation | Dynamometer system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2012068199A (ja) | 2012-04-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5605127B2 (ja) | 軸トルク制御装置 | |
| JP5214578B2 (ja) | 動力装置の制御装置 | |
| US10414287B2 (en) | Control apparatus for rotary electric machines | |
| JP5326429B2 (ja) | 電動機の脈動抑制装置 | |
| WO2016117394A1 (ja) | ダイナモメータシステムの制御装置 | |
| WO2002038332A1 (en) | Servocontrol device | |
| JP2009042985A (ja) | モータ制御装置及びモータ制御方法 | |
| JP2011257205A (ja) | ダイナモメータシステムの軸トルク制御装置 | |
| JP4645231B2 (ja) | 動力伝達系の試験装置とその制御方法 | |
| CN104993766A (zh) | 一种二质量系统谐振抑制方法 | |
| JP2017090195A (ja) | ダイナモメータシステムのダイナモ制御装置及びそのエンジン始動方法 | |
| JP4914979B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP6007831B2 (ja) | 動力系の試験装置 | |
| WO2018190303A1 (ja) | 電気慣性制御装置 | |
| WO2017188271A1 (ja) | 試験システムのダイナモメータ制御装置 | |
| JP4591177B2 (ja) | エンジン試験装置 | |
| WO2020100268A1 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP7317597B2 (ja) | 制御装置 | |
| JP2013053978A (ja) | エンジンベンチシステムの制御装置 | |
| WO2020194637A1 (ja) | 電動車両の制御方法、及び、制御装置 | |
| JP2008145354A (ja) | エンジン試験方法、及び、試験装置 | |
| JP2013257857A (ja) | 機械装置の制御装置、機械システム、及び機械装置の制御方法 | |
| JP5895405B2 (ja) | エンジンベンチシステムの制御装置 | |
| JP5850179B2 (ja) | モータ制御装置およびモータ制御方法 | |
| WO2015186616A1 (ja) | シャシーダイナモメータの制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130906 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130906 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20130906 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140718 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140729 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140811 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5605127 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |