JP4914979B2 - モータ制御装置およびモータ制御方法 - Google Patents
モータ制御装置およびモータ制御方法 Download PDFInfo
- Publication number
- JP4914979B2 JP4914979B2 JP2007065062A JP2007065062A JP4914979B2 JP 4914979 B2 JP4914979 B2 JP 4914979B2 JP 2007065062 A JP2007065062 A JP 2007065062A JP 2007065062 A JP2007065062 A JP 2007065062A JP 4914979 B2 JP4914979 B2 JP 4914979B2
- Authority
- JP
- Japan
- Prior art keywords
- motor
- load
- value
- torque
- disturbance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images




Description

11 負荷
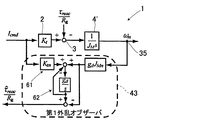
35 モータ速度検出手段
36 負荷速度検出手段
42 状態フィードバック制御部(状態フィードバック制御手段)
43 第1外乱オブザーバ(モータ側外乱オブザーバ)
44 ギア比変換手段(モータ側外乱オブザーバ)
45 第2外乱オブザーバ(負荷側外乱オブザーバ)
46 補償電流算出手段(外乱抑制制御手段)
47 演算器(外乱抑制制御手段)
Claims (2)
- モータの駆動力を負荷に機械的に伝達してなるモータ制御装置において、
前記モータに取付けられ、このモータの外乱トルクであるねじりトルクの推定値を出力するモータ側外乱オブザーバと、
前記負荷に取付けられ、前記モータ側外乱オブザーバからの推定値を入力することにより、前記ねじりトルクと分離して前記負荷の外乱トルクの推定値を出力する負荷側外乱オブザーバと、
前記負荷側外乱オブザーバからの推定値を入力することにより、外乱抑制のための補償電流を算出し、この補償電流を加えた電流指令値を前記モータに出力する外乱抑制制御手段と、
前記モータの速度応答値を検出するモータ速度検出手段と、
前記負荷の速度応答値を検出する負荷速度検出手段と、
前記モータの速度応答値と、前記負荷の速度応答値と、これらの各速度応答値から得られる前記モータのねじり角とを入力して、前記モータおよび前記負荷の状態フィードバック制御を行なう状態フィードバック制御手段と、を備え、
前記モータ側外乱オブザーバは、前記モータの速度応答値と、前記モータへの電流指令値とを入力して、前記ねじりトルクの推定値を算出するものであり、
前記負荷側外乱オブザーバは、前記負荷の速度応答値と、前記ねじりトルクの推定値とを入力して、前記負荷の外乱トルクの推定値を算出するものであり、
前記モータのトルク定数をK t とし、前記モータと前記負荷との間の機械共振振動によるばね定数をK s とし、前記モータの慣性モーメントJ M とし、前記モータの粘性摩擦をD M とし、前記状態フィードバック制御手段において前記モータの速度応答値に乗算されるゲインをF M とし、前記状態フィードバック制御手段において前記負荷の速度応答値に乗算されるゲインをF l とし、前記モータのねじり角に乗算されるゲインをF θ とし、前記負荷と前記モータとのギア比をR g とし、ラプラス演算子をsとしたときに、
前記外乱抑制制御手段は、負荷側外乱オブザーバからの推定値に、次の式で示す逆システムT m (s)を乗算し、
- モータの駆動力を負荷に機械的に伝達してなるモータ制御方法において、
前記モータに取付けられたモータ側外乱オブザーバにより、このモータの外乱トルクであるねじりトルクの推定値を出力し、
前記負荷に取付けられた負荷側外乱オブザーバが、前記モータ側外乱オブザーバからの推定値を入力することにより、前記ねじりトルクと分離して前記負荷の外乱トルクの推定値を出力し、
前記負荷側外乱オブザーバからの推定値を外乱抑制制御手段が入力することにより、外乱抑制のための補償電流を算出し、この補償電流を加えた電流指令値を前記モータに出力し、
前記モータの速度応答値をモータ速度検出手段で検出し、
このモータの速度応答値と、前記モータへの電流指令値とを入力して、前記モータ側外乱オブザーバが前記ねじりトルクの推定値を算出し、
前記負荷の速度応答値を負荷速度検出手段で検出し、
この負荷の速度応答値と、前記ねじりトルクの推定値とを入力して、前記負荷側外乱オブザーバが前記負荷の外乱トルクの推定値を算出し、
前記モータの速度応答値と、前記負荷の速度応答値と、これらの各速度応答値から得られる前記モータのねじり角とを入力して、状態フィードバック制御手段が前記モータおよび前記負荷の状態フィードバック制御を行ない、
前記モータのトルク定数をK t とし、前記モータと前記負荷との間の機械共振振動によるばね定数をK s とし、前記モータの慣性モーメントJ M とし、前記モータの粘性摩擦をD M とし、前記状態フィードバック制御手段において前記モータの速度応答値に乗算されるゲインをF M とし、前記状態フィードバック制御手段において前記負荷の速度応答値に乗算されるゲインをF l とし、前記モータのねじり角に乗算されるゲインをF θ とし、前記負荷と前記モータとのギア比をR g とし、ラプラス演算子をsとしたときに、
負荷側外乱オブザーバからの推定値に、次の式で示す逆システムT m (s)を乗算して、
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007065062A JP4914979B2 (ja) | 2007-03-14 | 2007-03-14 | モータ制御装置およびモータ制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007065062A JP4914979B2 (ja) | 2007-03-14 | 2007-03-14 | モータ制御装置およびモータ制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008228484A JP2008228484A (ja) | 2008-09-25 |
| JP4914979B2 true JP4914979B2 (ja) | 2012-04-11 |
Family
ID=39846437
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007065062A Expired - Fee Related JP4914979B2 (ja) | 2007-03-14 | 2007-03-14 | モータ制御装置およびモータ制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4914979B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110677079A (zh) * | 2019-09-04 | 2020-01-10 | 深圳市百盛传动有限公司 | 一种新型永磁同步电机速度控制模式扰动观测器 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102010003094A1 (de) * | 2010-03-22 | 2011-09-22 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Ermittlung eines Abgabemoments eines elektrischen Antriebs |
| JP5273575B2 (ja) * | 2011-09-01 | 2013-08-28 | 株式会社安川電機 | 電動機制御装置 |
| JP6962893B2 (ja) * | 2018-10-04 | 2021-11-05 | 株式会社神戸製鋼所 | 振動抑制装置、振動抑制方法及びプログラム |
| JP7068133B2 (ja) * | 2018-10-19 | 2022-05-16 | 国立大学法人 東京大学 | 制御システム、制御方法、及び制御プログラム |
| WO2020240846A1 (ja) * | 2019-05-31 | 2020-12-03 | 株式会社安川電機 | 制御装置、制御方法及びロボットシステム |
| WO2023053212A1 (ja) * | 2021-09-28 | 2023-04-06 | 株式会社ジェイテクト | モータ制御装置 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3220589B2 (ja) * | 1994-03-17 | 2001-10-22 | 三菱電機株式会社 | メカニカルシステムの制御装置 |
| JPH09121580A (ja) * | 1995-10-26 | 1997-05-06 | Meidensha Corp | 低慣性化制御による2慣性共振系の振動抑制装置 |
| JPH11231942A (ja) * | 1998-02-13 | 1999-08-27 | Toyo Electric Mfg Co Ltd | ねじり軸系トルク制御方法 |
| JP2002335686A (ja) * | 2001-05-09 | 2002-11-22 | Yaskawa Electric Corp | モータ制御装置 |
| JP3971959B2 (ja) * | 2002-05-28 | 2007-09-05 | 住友重機械工業株式会社 | 位置制御装置及び制御器設計方法 |
| JP4860277B2 (ja) * | 2005-06-30 | 2012-01-25 | Juki株式会社 | 多慣性共振系の振動抑制制御方法及び装置 |
-
2007
- 2007-03-14 JP JP2007065062A patent/JP4914979B2/ja not_active Expired - Fee Related
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110677079A (zh) * | 2019-09-04 | 2020-01-10 | 深圳市百盛传动有限公司 | 一种新型永磁同步电机速度控制模式扰动观测器 |
| CN110677079B (zh) * | 2019-09-04 | 2021-02-26 | 深圳市百盛传动有限公司 | 一种永磁同步电机速度控制模式扰动观测器 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008228484A (ja) | 2008-09-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4914979B2 (ja) | モータ制御装置およびモータ制御方法 | |
| JP5214578B2 (ja) | 動力装置の制御装置 | |
| KR100961606B1 (ko) | 전동 파워 스티어링 제어 장치 | |
| JP5409916B2 (ja) | 電動パワーステアリング装置 | |
| JP4685071B2 (ja) | モータ制御装置及びモータ制御方法 | |
| JP5605127B2 (ja) | 軸トルク制御装置 | |
| JP4367058B2 (ja) | モータ制御装置 | |
| JP5644409B2 (ja) | 電動機の位置制御装置 | |
| JP5644330B2 (ja) | モータ制御装置及びモータ制御方法 | |
| JP4645231B2 (ja) | 動力伝達系の試験装置とその制御方法 | |
| JP4419625B2 (ja) | 車両用制振制御装置および車両用制振制御方法 | |
| JP5200715B2 (ja) | 動力計システムの電気慣性制御装置 | |
| JP2007060767A (ja) | 機械定数同定装置を備えたモータ制御装置 | |
| JP2008048539A (ja) | モータ制御装置及び制御方法 | |
| JP2013257857A (ja) | 機械装置の制御装置、機械システム、及び機械装置の制御方法 | |
| JP6064694B2 (ja) | 動力系の試験装置 | |
| JP2005269833A (ja) | 車両用制振制御装置および車両用制振制御方法 | |
| JP7317597B2 (ja) | 制御装置 | |
| JP3856215B2 (ja) | 速度制御装置 | |
| US11791751B2 (en) | Motor control system, motor control method, and program | |
| JP2019170054A (ja) | 電動車両の制御方法、及び、電動車両の制御装置 | |
| CN113875145B (zh) | 马达驱动装置以及马达驱动装置的控制方法 | |
| JP5444929B2 (ja) | シャシーダイナモメータシステム | |
| JP5200714B2 (ja) | 電気慣性制御装置 | |
| JP4565426B2 (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090202 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090728 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110704 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110826 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111121 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111220 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150203 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |