JP5586312B2 - モータ駆動回路 - Google Patents
モータ駆動回路 Download PDFInfo
- Publication number
- JP5586312B2 JP5586312B2 JP2010099173A JP2010099173A JP5586312B2 JP 5586312 B2 JP5586312 B2 JP 5586312B2 JP 2010099173 A JP2010099173 A JP 2010099173A JP 2010099173 A JP2010099173 A JP 2010099173A JP 5586312 B2 JP5586312 B2 JP 5586312B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- period
- count value
- level
- circuit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 46
- 230000003247 decreasing effect Effects 0.000 claims description 6
- 101000685663 Homo sapiens Sodium/nucleoside cotransporter 1 Proteins 0.000 description 24
- 102100023116 Sodium/nucleoside cotransporter 1 Human genes 0.000 description 24
- 101000821827 Homo sapiens Sodium/nucleoside cotransporter 2 Proteins 0.000 description 13
- 102100021541 Sodium/nucleoside cotransporter 2 Human genes 0.000 description 13
- 238000010586 diagram Methods 0.000 description 12
- 230000007423 decrease Effects 0.000 description 9
- 239000003990 capacitor Substances 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 5
- 238000003708 edge detection Methods 0.000 description 5
- 101000822028 Homo sapiens Solute carrier family 28 member 3 Proteins 0.000 description 4
- 102100021470 Solute carrier family 28 member 3 Human genes 0.000 description 4
- 230000000630 rising effect Effects 0.000 description 4
- 238000001816 cooling Methods 0.000 description 2
- 230000001934 delay Effects 0.000 description 2
Images














Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P7/00—Arrangements for regulating or controlling the speed or torque of electric DC motors
- H02P7/06—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current
- H02P7/18—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power
- H02P7/24—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices
- H02P7/28—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices
- H02P7/285—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only
- H02P7/29—Arrangements for regulating or controlling the speed or torque of electric DC motors for regulating or controlling an individual DC dynamo-electric motor by varying field or armature current by master control with auxiliary power using discharge tubes or semiconductor devices using semiconductor devices controlling armature supply only using pulse modulation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Description
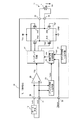
図1は、本発明の一実施形態であるモータ駆動IC(Integrated Circuit)10の構成を示す図である。モータ駆動IC10は、例えば、ノート型パーソナルコンピュータ等の電子機器において、プロセッサ等の発熱部品を冷却するためのファンモータに組み込まれている。
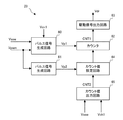
ここで、図4を参照しつつ、駆動信号生成回路23の詳細について説明する。駆動信号生成回路23は、パルス信号生成回路60,61、カウンタ62、駆動信号出力回路63、カウント値設定回路64、及びカウント値出力回路65を含んで構成される。なお、カウント値設定回路64、及びカウント値出力回路65が設定回路に相当する。
ここで、図11を参照しつつ、カウント値出力回路65の詳細について説明する。なお、カウント値出力回路65は、信号VsswがLレベルの場合、カウント値CNT2として“6”を出力し、信号VsswがHレベルの際、カウント値CNT2を例えば“0”から“7”へと増加させた後に“7”から“0”へと減少させる。
ここで、図4、図15を参照しつつ、駆動信号生成回路23の動作の一例を説明する。
まず、信号VsswがLレベルであると、カウント値出力回路65はカウント値CNT2として“6”を出力し続ける。そして、時刻t30において、PWM信号VpwmがHとなると、カウンタ62の初期値として“6”が設定される。その後、PWM信号VpwmがHレベルからLレベルとなるとパルス信号Vp1が出力されるため、カウンタ62のカウント値CNT1は“7”となる。このため、駆動信号生成回路23からは、PWM信号Vpwmのデューティ比と一致するようなデューティ比の駆動信号Vdrが出力される。なお、信号VsswがLレベルの間は、PWM信号Vpwmのデューティ比と一致するようなデューティ比の駆動信号Vdrが出力され続ける。
ここで、図1、図16を参照しつつモータ駆動IC10の動作について説明する。なお、ここでは、NMOSトランジスタ25Bのゲート電圧を電圧Vg1とし、NMOSトランジスタ25Aのゲート電圧を電圧Vg2とする。また、モータ駆動IC10には、所定のデューティ比D1のPWM信号Vpwmが入力されていることとする。さらに、デューティ比D1のPWM信号Vpwmに基づいてNMOSトランジスタ25Bがスイッチングされている際の駆動電流Idrの電流値をIxとし、NMOSトランジスタ25Aがスイッチングされている際の駆動電流Idrの電流値を−Ixとする。
11 単相モータ
12 ホール素子
20,50,51 コンパレータ
21 ソフトスイッチ期間生成回路
22 クロック信号生成回路
23 駆動信号生成回路
24 スイッチング回路
25A,25B NMOSトランジスタ
26A,26B PMOSトランジスタ
30〜34 端子
52 AND回路
60,61,80 パルス信号生成回路
62 カウンタ
63 駆動信号出力回路
64 カウント値設定回路
65 カウント値出力回路
70,101 エッジ検出回路
71,102 遅延回路
72,81,103 アップカウンタ
73,104 レジスタ
74,105 ダウンカウンタ
75,106 パルス信号出力回路
82 変換回路
83 記憶回路
84 セレクタ
100 逓倍回路
120〜122 EOR回路
Claims (3)
- PWM信号のデューティ比に基づいてモータコイルを駆動するモータ駆動回路であって、
前記PWM信号が一方の論理レベルとなる期間の1/nの期間ごとに第1パルス信号を生成する第1パルス信号生成回路と、
前記第1パルス信号に基づいてカウント値を変化させるカウンタと、
前記カウント値が所定値でない場合、一方の論理レベルの駆動信号を出力し、前記カウント値が前記所定値となると他方の論理レベルの前記駆動信号を出力する駆動信号出力回路と、
前記駆動信号のデューティ比に応じて前記モータコイルをPWM駆動する駆動回路と、
前記モータコイルに流れる電流の向きを変化させる期間のうち、前記モータコイルに流れる電流を減少させる期間において、前記モータコイルに流れる電流を減少させるようなカウント値を前記PWM信号の周期ごとに前記カウンタに設定し、前記モータコイルに流れる電流を増加させる期間において、前記モータコイルに流れる電流を増加させるようなカウント値を前記PWM信号の周期ごとに前記カウンタに設定する設定回路と、
前記モータコイルに流れる電流の向きを変化させる期間の1/mの期間ごとに第2パルス信号を生成する第2パルス信号生成回路と、
を備え、
前記設定回路は、
前記モータコイルに流れる電流を減少させる期間において、時間の経過とともに前記所定値との差が前記nを超えない範囲で小さくなるようなカウント値を生成し、前記モータコイルに流れる電流を増加させる期間において、時間の経過とともに前記所定値との差が前記nを超えない範囲で大きくなるようなカウント値を生成する生成回路と、
前記PWM信号の周期ごとに前記生成回路が生成するカウント値を前記カウンタに設定するカウント値設定回路と、
を含み、
前記生成回路は、
前記モータコイルに流れる電流の向きを変化させる期間において、前記第2パルス信号がk回入力されるまで、前記所定値との差が小さくなるようなカウント値を生成し、前記第2パルス信号がk+1回から前記m回入力されるまで、前記所定値との差が大きくなるようなカウント値を生成すること、
を特徴とするモータ駆動回路。 - 請求項1に記載のモータ駆動回路であって、
前記生成回路は、
前記第2パルス信号が前記k回、または前記k+1回入力されると、前記所定値となるカウント値を生成すること、
を特徴とするモータ駆動回路。 - 請求項1または請求項2に記載のモータ駆動回路であって、
前記第1パルス信号生成回路は、
前記モータコイルに流れる電流の向きを変化させる期間において、前記PWM信号が前記一方の論理レベルとなる期間の前記1/nの期間ごとに前記第1パルス信号を生成し、前記モータコイルに流れる電流の向きを変化させない期間において、前記PWM信号が前記一方の論理レベルから他方の論理レベルとなるごとに前記第1パルス信号を生成し、
前記設定回路は、
前記モータコイルに流れる電流の向きを変化させない期間において、前記第1パルス信号が前記カウンタに入力されると前記所定値となるカウント値を前記PWM信号の周期ごとに前記カウンタに設定すること、
を特徴とするモータ駆動回路。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010099173A JP5586312B2 (ja) | 2010-04-22 | 2010-04-22 | モータ駆動回路 |
| TW100110936A TW201212523A (en) | 2010-04-22 | 2011-03-30 | Motor driving circuit |
| US13/091,229 US8593100B2 (en) | 2010-04-22 | 2011-04-21 | Motor drive circuit |
| CN201110103962.6A CN102237847B (zh) | 2010-04-22 | 2011-04-22 | 马达驱动电路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010099173A JP5586312B2 (ja) | 2010-04-22 | 2010-04-22 | モータ駆動回路 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011229345A JP2011229345A (ja) | 2011-11-10 |
| JP5586312B2 true JP5586312B2 (ja) | 2014-09-10 |
Family
ID=44815243
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010099173A Active JP5586312B2 (ja) | 2010-04-22 | 2010-04-22 | モータ駆動回路 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8593100B2 (ja) |
| JP (1) | JP5586312B2 (ja) |
| CN (1) | CN102237847B (ja) |
| TW (1) | TW201212523A (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011151997A (ja) * | 2010-01-22 | 2011-08-04 | Sanyo Electric Co Ltd | モータ駆動回路 |
| JP5977933B2 (ja) * | 2011-09-15 | 2016-08-24 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | Pwm信号出力回路 |
| TWI441444B (zh) * | 2011-12-26 | 2014-06-11 | Anpec Electronics Corp | 調整馬達轉速之方法及可調整轉速之馬達驅動電路 |
| TWI473415B (zh) * | 2012-04-10 | 2015-02-11 | Padauk Technology Co Ltd | 可提高馬達驅動運轉效率之控制器與方法 |
| KR101367681B1 (ko) * | 2012-05-30 | 2014-02-26 | 삼성전기주식회사 | 신호 듀티 검출 장치 및 이를 갖는 모터 구동 장치 |
| KR101367678B1 (ko) | 2012-07-31 | 2014-02-26 | 삼성전기주식회사 | 모터 구동 장치 |
| JP6081734B2 (ja) * | 2012-08-13 | 2017-02-15 | ラピスセミコンダクタ株式会社 | 半導体装置、電子機器、及び制御信号生成方法 |
| JP5653976B2 (ja) * | 2012-08-27 | 2015-01-14 | 株式会社東海理化電機製作所 | モータ制御装置 |
| JP5653975B2 (ja) * | 2012-08-27 | 2015-01-14 | 株式会社東海理化電機製作所 | モータ制御装置 |
| JP2014050115A (ja) | 2012-08-29 | 2014-03-17 | Toshiba Corp | 単相モータ駆動回路、単相モータ装置、ファンを備えた装置 |
| JP6207223B2 (ja) * | 2013-05-01 | 2017-10-04 | キヤノン株式会社 | モータ駆動装置およびその制御方法 |
| US8907607B1 (en) * | 2013-07-30 | 2014-12-09 | Adda Corp. | Soft start circuit for a forward/reverse rotation fan |
| CN103633963B (zh) * | 2013-11-11 | 2016-01-27 | 电子科技大学 | 基于单线协议的占空比比较电路及方法 |
| US9479090B2 (en) * | 2013-12-20 | 2016-10-25 | Semiconductor Components Industries, Llc | Motor control circuit and method |
| JP6620316B2 (ja) * | 2014-09-12 | 2019-12-18 | パナソニックIpマネジメント株式会社 | Pwmモータ駆動装置 |
| CN104868802B (zh) * | 2015-05-11 | 2017-08-25 | 上海晶丰明源半导体股份有限公司 | 软开关控制模块以及直流无刷电机驱动系统 |
| US10003297B2 (en) | 2016-02-19 | 2018-06-19 | Kabushiki Kaisha Toshiba | Drive circuit and semiconductor apparatus for a high output motor |
| US10243490B2 (en) * | 2016-06-17 | 2019-03-26 | Semiconductor Components Industries, Llc | Controlling multiple facets of duty cycle response using a single motor integrated circuit pin |
| JP7050519B2 (ja) * | 2018-02-16 | 2022-04-08 | ローム株式会社 | ファンモータ駆動回路ならびにそれを用いた冷却装置および電子機器 |
| US11469701B2 (en) | 2020-03-18 | 2022-10-11 | Ebm-Papst Inc. | Technologies for adaptive multi-pulse commutation for brushless direct current motors |
| CN111614345A (zh) * | 2020-07-16 | 2020-09-01 | 杭州瑞盟科技有限公司 | 一种测量pwm占空比的集成电路及方法 |
| CN112968633A (zh) * | 2021-03-11 | 2021-06-15 | 肇庆晟辉电子科技有限公司 | 直流无刷电机的软切换相位控制电路 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7315151B2 (en) * | 1995-01-11 | 2008-01-01 | Microplanet Inc. | Method and apparatus for electronic power control |
| US5747972A (en) * | 1995-01-11 | 1998-05-05 | Microplanet Ltd. | Method and apparatus for electronic power control |
| US6961015B2 (en) * | 2002-11-14 | 2005-11-01 | Fyre Storm, Inc. | Touch screen display circuit and voltage measurement circuit |
| JP2005287196A (ja) | 2004-03-30 | 2005-10-13 | Nippon Densan Corp | ブラシレスdcモータ駆動装置 |
| JP2005295769A (ja) * | 2004-04-05 | 2005-10-20 | Toshiba Microelectronics Corp | モータ制御装置及びモータ制御方法 |
| JP4020100B2 (ja) * | 2004-06-14 | 2007-12-12 | ソニー株式会社 | ディスク駆動装置及びモータドライバ回路 |
| JP4614727B2 (ja) * | 2004-10-13 | 2011-01-19 | 三洋電機株式会社 | モータ駆動装置 |
| JP4677265B2 (ja) * | 2005-03-31 | 2011-04-27 | 三洋電機株式会社 | モータ駆動用集積回路 |
| JP2007174778A (ja) * | 2005-12-21 | 2007-07-05 | Japan Servo Co Ltd | 単相ブラシレスdcモータ |
| ITVA20070008A1 (it) * | 2007-01-17 | 2008-07-18 | St Microelectronics Srl | Metodo e relativo dispositivo per stimare valori assunti in un certo istante da una corrente circolante in un avvolgimento di un carico elettrico polifase |
| CN101232266A (zh) * | 2007-01-22 | 2008-07-30 | 陞达科技股份有限公司 | 直流无刷马达的控制方法及装置 |
| JP4445978B2 (ja) * | 2007-04-12 | 2010-04-07 | ローム株式会社 | モータ駆動装置、モータの制御方法およびそれを用いた冷却装置 |
| JP5297634B2 (ja) * | 2007-11-21 | 2013-09-25 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | モータ駆動回路、ファンモータ、電子機器、及びノート型パーソナルコンピュータ |
-
2010
- 2010-04-22 JP JP2010099173A patent/JP5586312B2/ja active Active
-
2011
- 2011-03-30 TW TW100110936A patent/TW201212523A/zh unknown
- 2011-04-21 US US13/091,229 patent/US8593100B2/en active Active
- 2011-04-22 CN CN201110103962.6A patent/CN102237847B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2011229345A (ja) | 2011-11-10 |
| US8593100B2 (en) | 2013-11-26 |
| CN102237847A (zh) | 2011-11-09 |
| US20110260669A1 (en) | 2011-10-27 |
| CN102237847B (zh) | 2015-11-25 |
| TW201212523A (en) | 2012-03-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5586312B2 (ja) | モータ駆動回路 | |
| TWI407681B (zh) | 馬達驅動電路 | |
| US20100237813A1 (en) | Brushless motor driving apparatus | |
| US9503011B2 (en) | Motor driving method, motor driving device, and hard disk device | |
| TW201240324A (en) | Motor driving circuit and method, and cooling device and electronic apparatus using the same | |
| KR20130029736A (ko) | Pwm 신호 출력 회로 | |
| JP2004187454A (ja) | モータ駆動回路 | |
| JP2014050115A (ja) | 単相モータ駆動回路、単相モータ装置、ファンを備えた装置 | |
| US9035710B2 (en) | PWM signal generating circuit, printer, and PWM signal generating method | |
| US9602030B2 (en) | Motor drive circuit and motor thereof | |
| TW201320580A (zh) | Pwm信號輸出電路 | |
| US9030146B2 (en) | Driving apparatus and motor | |
| JP2015216711A (ja) | モータ駆動回路およびそれを用いた冷却装置、電子機器 | |
| TWI558090B (zh) | 用於消除直流馬達內轉子之充磁誤差的控制裝置及其方法 | |
| JP2011205792A (ja) | タイミング検出回路、それを用いたモータ駆動回路、冷却装置、電子機器 | |
| JP2000049595A (ja) | Dll回路 | |
| JP5570326B2 (ja) | モータ駆動装置およびそれを用いた冷却装置、回転数信号の生成方法 | |
| JP2010104115A (ja) | モータ制御回路及びこれを備えたモータ装置ならびにモータ制御方法 | |
| JP4677265B2 (ja) | モータ駆動用集積回路 | |
| JP5212012B2 (ja) | モータ回転制御回路 | |
| US8917048B2 (en) | Motor control device and motor control method | |
| JP2007006563A (ja) | 単相モータ駆動回路 | |
| JP2011055629A (ja) | ステッピングモータ駆動装置および方法 | |
| JP2007037388A (ja) | モータ駆動装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20130213 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130405 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140304 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140530 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20140624 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20140722 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5586312 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |