JP2005295769A - モータ制御装置及びモータ制御方法 - Google Patents
モータ制御装置及びモータ制御方法 Download PDFInfo
- Publication number
- JP2005295769A JP2005295769A JP2004111276A JP2004111276A JP2005295769A JP 2005295769 A JP2005295769 A JP 2005295769A JP 2004111276 A JP2004111276 A JP 2004111276A JP 2004111276 A JP2004111276 A JP 2004111276A JP 2005295769 A JP2005295769 A JP 2005295769A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- rotation
- pwm drive
- value
- switching transistor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Control Of Direct Current Motors (AREA)
Abstract
【解決手段】 モータ2の回転位置の現在値PVを検出する位置検出センサ12、及び外部から指示された指示値COMと現在値PVに基づき、モータ2の回転開始から一定期間においてPWM駆動によりモータ2を駆動するPWM駆動回路11とを備える。
【選択図】 図1
Description
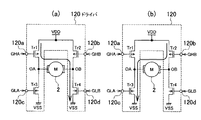
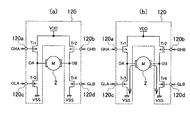
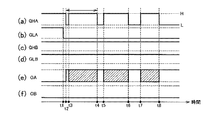
本発明の実施の形態の第1の変形例に係るPWM駆動回路として、図11に示すように、ドライブ状態、ストップ状態、及びブレーキ状態の組み合わせにより回転開始時におけるPWM駆動を行っても良い。具体的には、ドライブ状態、ストップ状態、及びブレーキ状態の切り換え制御は、図1に示すドライバ制御回路119により実行される。即ち、ドライバ制御回路119は、図1に示すモータ2に駆動電流を供給する状態、モータ2に駆動電流を供給せずにモータ2からの誘起電力を回収しない状態、及びモータ2に駆動電流を供給せずにモータ2からの誘起電力を回収する状態を制御する。
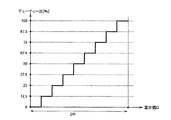
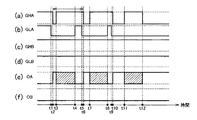
本発明の実施の形態の第2の変形例に係るPWM駆動回路は、図13に示すように、モータ2の回転開始時に実行されるPWM駆動において、モータ2の回転開始の直後にデューティー比を増加させても良い。具体的には、回転開始時におけるデューティー比の制御は、図1に示す第1デコーダ116により実行される。図13に示す例において第1デコーダ116は、モータ2の回転開始の直後にデューティー比を100%に設定し、その後デューティー比を段階的に増加させている。本発明の実施の形態の第2の変形例によれば、モータ2の回転開始の直後にデューティー比を増加させることにより、モータ2の起動を確実に行うことができる。
上記のように、本発明は実施の形態によって記載したが、この開示の一部をなす論述及び図面はこの発明を限定するものであると理解すべきではない。この開示から当業者には様々な代替実施の形態、実施例及び運用技術が明らかとなろう。
2…モータ
11…PWM駆動回路
12…位置検出センサ
Claims (5)
- モータの回転位置の現在値を検出する位置検出センサと、
外部から指示された指示値と前記現在値に基づき、前記モータの回転開始から一定期間においてPWM駆動により前記モータを駆動するPWM駆動回路
とを備えることを特徴とするモータ制御装置。 - 前記PWM駆動回路は、前記現在値と前記指示値との差分が一定値以下になった場合、前記モータをPWM駆動することを特徴とする請求項1に記載のモータ制御装置。
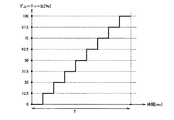
- 前記PWM駆動回路は、前記一定期間において前記PWM駆動のデューティー比を段階的に増加させることを特徴とする請求項1に記載のモータ制御装置。
- 前記PWM駆動回路は、前記PWM駆動の際、前記モータに駆動電流を供給する状態、前記駆動電流を供給せずに前記モータからの誘起電力を回収しない状態、及び前記駆動電流を供給せずに前記誘起電力を回収する状態を制御することを特徴とする請求項1又は2に記載のモータ制御装置。
- モータの回転位置の現在値を検出するステップと、
外部から指示された指示値と前記現在値に基づき、前記モータの回転開始から一定期間においてPWM駆動により前記モータを駆動するステップ
とを含むことを特徴とするモータ制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004111276A JP2005295769A (ja) | 2004-04-05 | 2004-04-05 | モータ制御装置及びモータ制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004111276A JP2005295769A (ja) | 2004-04-05 | 2004-04-05 | モータ制御装置及びモータ制御方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2005295769A true JP2005295769A (ja) | 2005-10-20 |
Family
ID=35328081
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004111276A Pending JP2005295769A (ja) | 2004-04-05 | 2004-04-05 | モータ制御装置及びモータ制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2005295769A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011229345A (ja) * | 2010-04-22 | 2011-11-10 | On Semiconductor Trading Ltd | モータ駆動回路 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61210885A (ja) * | 1985-03-13 | 1986-09-19 | Rengo Co Ltd | 電動機駆動用電源回路 |
| JPH03241A (ja) * | 1989-05-26 | 1991-01-07 | Denki Kagaku Kogyo Kk | 積層物 |
| JPH0670496U (ja) * | 1993-03-10 | 1994-09-30 | 株式会社ニコン | 誘導性負荷の駆動電源回路 |
| JPH08182366A (ja) * | 1994-12-27 | 1996-07-12 | Alps Electric Co Ltd | サーボモータの駆動制御装置 |
| JP2002345294A (ja) * | 2001-05-17 | 2002-11-29 | Mitsuba Corp | アクチュエータの速度制御方法 |
-
2004
- 2004-04-05 JP JP2004111276A patent/JP2005295769A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61210885A (ja) * | 1985-03-13 | 1986-09-19 | Rengo Co Ltd | 電動機駆動用電源回路 |
| JPH03241A (ja) * | 1989-05-26 | 1991-01-07 | Denki Kagaku Kogyo Kk | 積層物 |
| JPH0670496U (ja) * | 1993-03-10 | 1994-09-30 | 株式会社ニコン | 誘導性負荷の駆動電源回路 |
| JPH08182366A (ja) * | 1994-12-27 | 1996-07-12 | Alps Electric Co Ltd | サーボモータの駆動制御装置 |
| JP2002345294A (ja) * | 2001-05-17 | 2002-11-29 | Mitsuba Corp | アクチュエータの速度制御方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011229345A (ja) * | 2010-04-22 | 2011-11-10 | On Semiconductor Trading Ltd | モータ駆動回路 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5202089B2 (ja) | Hブリッジ駆動回路及びhブリッジ回路の制御方法 | |
| US7609015B2 (en) | Load driving device and electrical apparatus using the same | |
| CN1316729C (zh) | 单相电动机驱动装置、单相电动机驱动方法 | |
| JP3419157B2 (ja) | モータ駆動方法及びそれを用いた電気機器 | |
| JP4882417B2 (ja) | 電動パワーステアリング装置 | |
| JP2009240151A (ja) | 駆動信号供給制御用半導体装置 | |
| US7218072B2 (en) | Motor driving device, motor to be driven by the same device, and apparatus using the same motor | |
| JP4265548B2 (ja) | 発電制御装置 | |
| JP2001016893A (ja) | 直流モータ駆動装置 | |
| JP4195048B2 (ja) | インバータ装置 | |
| JP2005295769A (ja) | モータ制御装置及びモータ制御方法 | |
| JP3802547B2 (ja) | 単相モータ駆動装置 | |
| JP4020100B2 (ja) | ディスク駆動装置及びモータドライバ回路 | |
| US20030155880A1 (en) | Motor driving device and motor driving method | |
| US7291994B2 (en) | System and method for establishing spindle motor current during cold temperature operation of HDD | |
| JP4062228B2 (ja) | 直流電動機の駆動装置 | |
| JP5374145B2 (ja) | モータ制御装置 | |
| JP2008118842A (ja) | モータ制御装置 | |
| JP3698071B2 (ja) | ディジタルディスク駆動装置 | |
| JP3818993B2 (ja) | モータ駆動装置 | |
| JP2010074923A (ja) | モータ制御装置 | |
| JP2021065074A (ja) | モータ制御装置 | |
| JP2008228474A (ja) | モータ駆動装置 | |
| JP6928156B2 (ja) | モータ制御装置およびドア開閉装置 | |
| JP2009011031A (ja) | 負荷駆動制御回路 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070222 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20091224 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100105 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100303 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100608 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100701 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101012 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101210 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110222 |