JP5407952B2 - 車両運転支援装置及び車両運転支援方法 - Google Patents
車両運転支援装置及び車両運転支援方法 Download PDFInfo
- Publication number
- JP5407952B2 JP5407952B2 JP2010057213A JP2010057213A JP5407952B2 JP 5407952 B2 JP5407952 B2 JP 5407952B2 JP 2010057213 A JP2010057213 A JP 2010057213A JP 2010057213 A JP2010057213 A JP 2010057213A JP 5407952 B2 JP5407952 B2 JP 5407952B2
- Authority
- JP
- Japan
- Prior art keywords
- obstacle
- control
- intention
- vehicle
- driver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images








Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
- B60T7/22—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger initiated by contact of vehicle, e.g. bumper, with an external object, e.g. another vehicle, or by means of contactless obstacle detectors mounted on the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/167—Driving aids for lane monitoring, lane changing, e.g. blind spot detection
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/28—Wheel speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/18—Steering angle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/20—Direction indicator values
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2556/00—Input parameters relating to data
- B60W2556/45—External transmission of data to or from the vehicle
- B60W2556/50—External transmission of data to or from the vehicle of positioning data, e.g. GPS [Global Positioning System] data
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/9315—Monitoring blind spots
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S13/00—Systems using the reflection or reradiation of radio waves, e.g. radar systems; Analogous systems using reflection or reradiation of waves whose nature or wavelength is irrelevant or unspecified
- G01S13/88—Radar or analogous systems specially adapted for specific applications
- G01S13/93—Radar or analogous systems specially adapted for specific applications for anti-collision purposes
- G01S13/931—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles
- G01S2013/932—Radar or analogous systems specially adapted for specific applications for anti-collision purposes of land vehicles using own vehicle data, e.g. ground speed, steering wheel direction
Landscapes
- Engineering & Computer Science (AREA)
- Remote Sensing (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Traffic Control Systems (AREA)
- Regulating Braking Force (AREA)
Description
そこで、本発明は、運転者に与える違和感を低減しつつ、側方障害物に対する支援制御を適切に行うことができる車両運転支援装置及び車両運転支援方法を提供することを課題としている。
本実施形態では、後輪駆動車両に対し、車両運転支援装置を搭載する場合について説明する。なお、対象とする車両として、前輪駆動車両や四輪駆動車両を適用することもできる。
(第1の実施の形態)
(構成)
図1は、本実施形態に係る装置の概要構成図である。
ブレーキペダル1は、ブースタ2を介してマスタシリンダ3に連結する。また、図中符号4はリザーバである。
マスタシリンダ3は、流体圧回路30を介して各輪の各ホイールシリンダ6FL〜6RRに連結する。これにより、制動制御が作動しない状態では、運転者によるブレーキペダル1の踏込み量に応じて、マスタシリンダ3で制動流体圧を昇圧する。その昇圧した制動流体圧を、流体圧回路30を通じて、各車輪5FL〜5RRの各ホイールシリンダ6FL〜6RRに供給する。
ここで、制動流体圧制御部7及び流体圧回路30は、例えばアンチスキッド制御(ABS)、トラクション制御(TCS)又はビークルダイナミックスコントロール装置(VDC)で使用する制動流体圧制御部を利用すればよい。制動流体圧制御部7は、単独で各ホイールシリンダ6FL〜6RRの制動流体圧を制御する構成とすることもできる。そして、後述する制駆動力コントロールユニット8から制動流体圧指令値を入力した場合には、その制動流体圧指令値に応じて各制動流体圧を制御する。
駆動トルクコントロールユニット12は、駆動輪である後輪5RL、5RRへの駆動トルクを制御する。この制御は、エンジン9の運転状態、自動変速機10の選択変速比、及びスロットルバルブ11のスロットル開度を制御することで実現する。すなわち、駆動トルクコントロールユニット12は、燃料噴射量や点火時期を制御する。また同時に、スロットル開度を制御する。これにより、エンジン9の運転状態を制御する。
なお、この駆動トルクコントロールユニット12は、単独で後輪5RL、5RRの駆動トルクを制御することも可能である。ただし、制駆動力コントロールユニット8から駆動トルク指令値を入力したときには、その駆動トルク指令値に応じて駆動輪トルクを制御する。
撮像部13は、自車両前方を撮像する。そして、撮像部13は、撮像した自車両前方の撮像画像について画像処理を行い、白線(レーンマーカ)等の車線区分線を検出し、検出した白線に基づいて、走行車線を検出する。
ここで、撮像部13は、走行車線をなす白線を検出して、その検出した白線に基づき、ヨーφfrontを算出している。このため、ヨー角φfrontは、撮像部13の白線の検出精度に大きく影響する。
なお、走行車線曲率βfrontを、後述のステアリングホイール21の操舵角δに基づいて算出することもできる。
マスタシリンダ圧センサ17は、マスタシリンダ3の出力圧、すなわちマスタシリンダ液圧Pmを検出する。アクセル開度センサ18は、アクセルペダルの踏込み量、すなわちアクセル開度θtを検出する。操舵角センサ19は、ステアリングホイール21の操舵角(ステアリング舵角)δを検出する。方向指示スイッチ20は、方向指示器による方向指示操作を検出する。車輪速度センサ22FL〜22RRは、各車輪5FL〜5RRの回転速度、所謂車輪速度Vwi(i=fl、fr、rl、rr)を検出する。そして、これらセンサ等は、検出した検出信号を、制駆動力コントロールユニット8に出力する。
さらに、この車両は、画像処理機能付きの撮像装置50を備える。撮像装置50は、運転者の視線方向を検出するために使用する。この撮像装置50は、例えばCCD(Charge Coupled Device)カメラからなる単眼カメラで構成する。
図2に示すように、制駆動力コントロールユニット8は、将来位置予測手段8A、制御開始判定手段8Bを備える。また、制御開始判定手段8Bは、開始タイミング調整手段(開始タイミング変更手段)8Ba及び車線変更意図検出手段(意図検出手段)8Bbを備える。
将来位置予測手段8Aは、操舵入力検出手段で検出した運転者の操舵入力に基づいて、予め設定された前方注視時間Tt(=車頭時間)経過後の自車両の将来位置を予測する。
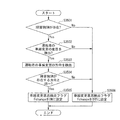
この回避制御処理は、所定サンプリング時間ΔT毎(例えば、10msec毎)にタイマ割込によって実行する。なお、この図3に示す処理内には通信処理を設けていないが、演算処理によって取得した情報は、随時記憶装置に更新記憶すると共に、必要な情報を随時記憶装置から読み出す。
先ずステップS10で、制駆動力コントロールユニット8は、上記各センサやコントローラ、コントロールユニットから各種データを読み込む。具体的には、各センサが検出した、各車輪速度Vwi、操舵角δ、マスタシリンダ液圧Pm及び方向スイッチ信号を取得する。
V=(Vwrl+Vwrr)/2 (:前輪駆動の場合),
V=(Vwfl+Vwfr)/2 (:後輪駆動の場合) ………(1)
ここで、Vwfl、Vwfrは左右前輪それぞれの車輪速度である。Vwrl、Vwrrは左右後輪それぞれの車輪速度である。すなわち、上記(1)式では、車速Vを、従動輪の車輪速の平均値として算出している。なお、本実施形態では、後輪駆動の車両であるので、後者の式、すなわち前輪の車輪速度により車速Vを算出する。
ステップS30では、制駆動力コントロールユニット8は、左右の各レーダー装置24L/Rからの信号に基づき、自車両MMの左右側方について、障害物SMの存在Lobst・Robstの有無を取得する。なお、より検出精度の高いセンサを使用する場合には、自車両MMに対する側方障害物SMの相対位置および相対速度も取得する。ここで、図4に示すように、自車両MM側方とは、自車両MMに対して斜め後方位置も含む。
図5は、ステップS35で実行する車線変更意図検出処理手順を示すフローチャートである。
先ず、ステップS3501で、制駆動力コントロールユニット8は、障害物SMの存在Lobst・Robstの有無を判定する。そして、障害物SMが左右共に存在しないと判定した場合には、後述するステップS3506に移行する。一方、左右の少なくとも一方に障害物SMが存在する場合には、ステップS3502に移行する。
一方、方向指示器による方向指示操作がある場合には、運転者に車線変更の意図があると判定し、ステップS3503に移行する。
ステップS3503では、制駆動力コントロールユニット8は、方向指示スイッチ20からの信号に基づき、運転者の車線変更の方向を検出してステップS3504に移行する。
一方、運転者の車線変更の方向が、障害物SMが存在する方向と同一である場合にはステップS3505に移行し、車線変更意図検出フラグFchangeをONに設定してから車線変更意図検出処理を終了する。
なお、本実施形態においては、方向指示スイッチ20からの信号に基づき、運転者の車線変更の意図及びその方向を検出している。これは、障害物が走行している車線を障害物の進路として定義し、運転者に障害物の走行している車線へ侵入する意図が有る場合に、運転者に障害物の進路へ侵入する意図が有ると判定しているものである。なお、運転者に障害物の進路へ侵入する意図が有ることを判定する方法は上記に限定されない。
ただし、走行車線の曲率βfrontの取得は、撮像部13に限定しない。例えば、ナビゲーションシステムの自車位置において記録している曲率情報などによって取得してもよい。
また、現在走行している走行路に対する自車両MMのヨー角φfrontを算出する。このヨー角φfrontは、レーン内の走行状況を検出するために使用する。
本実施形態では、このヨー角φfrontは、撮像部13による実測値を使用する。
φfront=tan-1(dX′/V(=dX/dY)) ………(2)
ここで、dXは横変位Xfrontの単位時間当たりの変化量、dYは単位時間当たりの進行方向の変化量、dX´は上記変化量dXの微分値である。
なお、近傍の白線に基づいてヨー角φfrontを算出する場合、上記(2)式のように、横変位Xfrontを用いてヨー角φfrontを算出することに限定しない。例えば、近傍で検出した白線を遠方に延長し、その延長した白線に基づいて、ヨー角φfrontを算出してもよい。
φ’path=βfront・V ………(3)
ステップS60では、制駆動力コントロールユニット8は、前方注視時間Tt(=車頭距離)を設定する。
前方注視時間Ttは、運転者の将来の障害物SMとの接近状況を予測するための閾値を決定づけるための予め設定された所定の時間である。例えば、前方注視時間Ttを1秒に設定しておく。
目標ヨーレートΨdriverは、下記式のように、操舵角δと車速度Vから算出する。この目標ヨーレートΨdriverは、操舵に応じて発生させる目標のヨーレートである。
Ψdriver = Kv・δ・V ………(4)
ここで、Kvはゲインである。
さらに、目標ヨーレートΨdriverhoseiを、下記式によって算出する。この目標ヨーレートΨdriverhoseiは、目標ヨーレートΨdriverから、走行路を走行するために必要となる中立ヨーレートφ’pathを除いた値である。これによって、カーブ路を走行するために行う操舵による影響を除去する。
Ψdriverhosei= Ψdriver − φ’path ………(5)
ここでは、前方注視時間Ttの調整処理を、前記ステップS35で設定した車線変更意図検出フラグFchangeに応じて区分する。
[車線変更意図検出フラグFchange=OFFの場合]
車線変更意図検出フラグFchangeに基づき、運転者の障害物SM側の隣接車線への車線変更の意図が無いと判定した場合には、警報用調整ゲインαWL,αWR、及び制御用調整ゲインαCL,αCRをそれぞれ“1”に設定し、そのまま後述するステップS70に移行する。この場合には、前方注視時間Ttの補正は行わない。
[車線変更意図検出フラグFchange=ONの場合]
車線変更意図検出フラグFchangeに基づき、運転者の障害物SM側の隣接車線への車線変更の意図が有ると判定した場合には、以下に示す方法により、警報用調整ゲインαWL,αWR、及び制御用調整ゲインαCL,αCRを設定する。
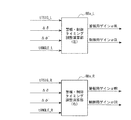
この図6に示すように、警報・制御タイミング調整演算部(左)8Ba_Lは、tTSIG_L、Δδ、Δφ’及びtANGLE_Lを入力し、警報用調整ゲインαWL及び制御用調整ゲインαCLを出力する。
ここで、tTSIG_Lは、方向指示器による左方向への方向指示操作を検出してからの時間である。ここでは、時間tTSIG_Lが大きいほど運転者による車線変更意図の確度(検出した運転者の車線変更意図の確からしさ)が大きいと判断する。
さらに、Δφ’はヨーレート変化量(φ’−φ’0)であり、右方向を正値とする。なお、φ’0は基準ヨーレートであり、時定数が大きなフィルタ処理を行った後の値、若しくは走行路の曲率、自車両の速度から演算した舵角としてもよい。そして、ヨーレート変化量|Δφ’|が大きいほど運転者による車線変更意図の確度が大きいと判断する。
また、tANGLE_Lは、運転者の視線方向が所定の車線変更判定角度(<0:左方向)を下回ってからの時間である。ここでは、時間tANGLE_Lが大きいほど運転者による車線変更意図の確度が大きいと判断する。
第1ゲイン算出部8Ba_L1は、方向指示操作を検出してからの時間tTSIG_Lに基づいて、第1の調整ゲイン算出マップを参照して第1の調整ゲインαWL1及びαCL1を算出する。
ここで、第1の調整ゲイン算出マップは、縦軸に第1の調整ゲインαWL1又はαCL1、横軸に時間tTSIG_Lをとる。そして、時間tTSIG_Lが所定時間t1まではαWL1(又はαCL1)=1となり、所定時間t1を超える領域では、tTSIG_Lが大きいほど第1の調整ゲインαWL1及びαCL1が大きくなるように設定する。
ここで、第2の調整ゲイン算出マップは、縦軸に第2の調整ゲインαWL2又はαCL2、横軸に舵角操作変化量Δδをとる。そして、左方向の舵角操作変化量Δδが所定量Δδ1までαWL2(又はαCL2)=1となり、所定量Δδ1より小さい領域では、Δδが小さいほど(|Δδ|が大きいほど)第2の調整ゲインαWL2及びαCL2が大きくなるように設定する。また、右方向の舵角変化が生じている場合(Δδ>0)は、αWL2(又はαCL2)=1とする。
ここで、第3の調整ゲイン算出マップは、縦軸に第3の調整ゲインαWL3又はαCL3、横軸にヨーレート変化量Δφ’をとる。そして、左方向のヨーレート変化量Δφ’が所定量Δφ’1までαWL3(又はαCL3)=1となり、所定量Δφ’1より小さい領域では、Δφ’が小さいほど(|Δφ’|が大きいほど)第3の調整ゲインαWL3及びαCL3が大きくなるように設定する。また、右方向のヨーレート変化が生じている場合(Δφ’>0)は、αWL3(又はαCL3)=1とする。
ここで、第4の調整ゲイン算出マップは、縦軸に第4の調整ゲインαWL4又はαCL4、横軸に時間tANGLE_Lをとる。そして、時間tANGLE_Lが所定時間t2まではαWL4(又はαCL4)=1となり、所定時間t2を超える領域では、tANGLE_Lが大きいほど第4の調整ゲインαWL4及びαCL4が大きくなるように設定する。
なお、第1〜第4の調整ゲインαWL1〜αWL4及びαCL1〜αCL4には、それぞれ上限値を設ける。
また、同様に、警報用調整ゲインαWR及び制御用調整ゲインαCRは、時間tTSIG_Rが大きいほど、右方向の舵角操作変化量Δδが大きいほど、右方向のヨーレート変化量Δφ’が大きいほど、時間tANGLE_Rが大きいほど、大きくなるように設定する。ここで、時間tANGLE_Rは、運転者の視線方向が所定の車線変更判定角度(>0:右方向)を上回ってからの時間である。
TtL ← Tt・αCL,
TtR ← Tt・αCR ………(6)
このように、運転者に障害物側の隣接車線への車線変更意図がある場合には、車線変更意図がない場合と比較して警報用調整ゲインαWL,αWR及び制御用調整ゲインαCL,αCRを大きく算出することで、前方注視時間TtL,TtRを長くする。また、このとき、車線変更意図の確度が大きいほど各調整ゲインを大きく算出する。
ΔXb =(K1φ+K2φm+K3φm’) ………(7)
ここで、
φ :ヨー角,
φm :目標ヨー角速度,
φm’:目標ヨー角加速度
である。
φm = Ψdriverhosei・Tt ………(8)
さらに、目標ヨー角加速度φm’は、下記式となる。
φm’= φm・Tt2 ………(9)
ここで、自車両予測位置ΔXbを、ヨー角の次元とするために、前方注視距離Lを用いると、下式で表すことができる。
ΔXb = L・(K1φ+K2φm・T+K3φm’・Tt2) ………(10)
前方注視距離L=前方注視時間Tt・車速V ………(11)
こうした特性をふまえると、設定ゲインK1は車速を関数とした値となる。また、設定ゲインK2は、車速と前方注視時間を関数とした値となる。設定ゲインK3は、車速と、前方注視時間の2乗を関数とした値となる。
なお、自車両MMの予測位置を、下記式のように、操舵角成分と操舵速度成分を個別に求めてセレクトハイをして算出しても良い。
ΔXb = max(K2φm,K3∫φm’) ………(12)
次に、ステップS80では、制駆動力コントロールユニット8は、制御開始のための判定閾値を設定する。この判定閾値は、側方障害物SMに対する回避制御を開始するかどうかの判定閾値となる。
また、自車両MMと障害物SMとの横方向相対距離ΔOを正確に求めることができない場合には、障害物距離X2obstを上記判定閾値として設定する。障害物距離X2obstは、仮想的に障害物SMが存在するものとして設定するものであり、白線の位置を基準として、横方向所定距離に設定する。
さらに、既定の閾値Xthreshを上記判定閾値として設定してもよい。この閾値Xthreshは、自車両の将来位置が現在の自車両位置からどのくらい離れているかを予め設定した値である。
なお、障害物SMを検出するかどうかとして設定する障害物検出範囲は、自車両MMの側方における、所定の縦・横位置となるように設定する。また、縦位置については、障害物SMが自車両MMに対して接近する相対速度が大きいほど、障害物検出範囲が大きくなるように設定してもよい。
ここでは、下記式を満足する場合に制御開始と判定する。
ΔXb ≧ ΔO ………(13)
また、制御開始のための判定閾値として、障害物距離X2obstを用いる場合には、下記式を満足する場合に制御開始と判定する。
ΔX2=ΔXb−X0 ≧ X2obst ………(14)
さらに、制御開始のための判定閾値として、既定の閾値Xthreshを用いる場合には、下記式を満足する場合に制御開始と判定する。
ΔXb ≧ Xthresh ………(15)
また、制御対象とする障害物SMは、自車両MMの後側方向の車両だけでなく、隣接車線前方の対向車両も含めるようにしてもよい。
ここで、将来予測位置ΔXbが判定閾値未満か判定する場合に、ΔX2<ΔO−FのようにしてF分のヒスをもたせてもよい。すなわち、不感帯を設定してもよい。すなわち、制御介入閾値と制御終了閾値との間に不感帯を設けても良い。
ここで、アンチスキッド制御(ABS)、トラクション制御(TCS)又はビークルダイナミックスコントロール装置(VDC)が作動している場合には、障害物回避制御判断フラグFout_obstをOFFに設定する。これは、自動制動制御の作動中は、障害物回避制御を作動させないようにするためである。
先ず、前記ステップS90での検出に用いている制御用の前方注視時間Ttよりも長くなるように所定のゲインKbuzz(>1)を乗算すると共に、前記ステップS65で設定した警報用調整ゲインαWL,αWRを乗算する。こうして左警報用の前方注視時間TtL=Tt・Kbuzz・αWLと、右警報用の前方注視時間TtR=Tt・Kbuzz・αWRとを算出する。
次に、ステップS110にて、制駆動力コントロールユニット8は、目標ヨーモーメントMsを設定する。
障害物回避制御判断フラグFout_obstがOFFの場合には、目標ヨーモーメントMsを0に設定して、ステップS120に移行する。
一方、障害物回避制御判断フラグFout_obstがONの場合には、目標ヨーモーメントMsを次式により算出し、ステップS120に移行する。
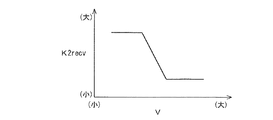
Ms=K1recv・K2recv・ΔXs ………(16)
ΔXs=(K1mon・φ+K2mon・φm)
あるいは、目標ヨーモーメントMsを、下記(17)式から算出してもよい。この(17)式は、上記(16)式に対して、ゲインK3(=1/Tt2)を掛けることと同義である。このゲインK3は、前方注視時間Ttが大きくなるほど減少するゲインとなる。
Ms=K1recv・ΔXb/(L・Tt2) ………(17)
ここで、本制御とは別に、自車両の車線からの逸脱傾向が検出された場合に自車両に車線内へ向かうヨーモーメントを発生させて車線からの逸脱を防止する車線逸脱防止制御を備える場合にあっては、本制御が作動開始するときと車線逸脱防止制御が作動開始する(Fout_LDP=1)ときとで、いずれかが先に制御を開始するかによって、先に制御開始した制御を優先し、その制御が終了するまで他方の制御を実施しないようにしてもよい。
ここで、本実施形態では、障害物回避のためのヨーモーメントMsを発生するための手段として、制駆動力を用いてヨーモーメントを発生する場合の例を、以下に説明する。
なお、ヨーモーメントを発生させる手段としてステアリング反力制御装置を用いる場合には、ステアリング反力FrstrはFrstr=Ka・Msとして反力を発生すればよい。ここで、KaはヨーモーメントMsをステアリング反力に変換するための係数であり、予め実験等により求める。
またヨーモーメントを発生させる手段としてはステアリング制御装置を用い、その操舵力(操舵トルク)をSTRtrg=Kc・Msとして求めて発生してもよい。ここで、KcはヨーモーメントMsを操舵力に変換するための係数であり、予め実験等により求める。
Psfl=Psfr=Pmf ………(18)
Psrl=Psrr=Pmr ………(19)
ここで、Pmfは前輪用の制動液圧である。また、Pmrは後輪用の制動液圧であり、前後配分を考慮して前輪用の制動液圧Pmfに基づいて算出した値になる。例えば、運転者がブレーキ操作をしていれば、制動液圧Pmf、Pmrはそのブレーキ操作の操作量(マスタシリンダ液圧Pm)に応じた値になる。
すなわち、目標ヨーモーメントMsに基づいて、前輪目標制動液圧差ΔPsf及び後輪目標制動液圧差ΔPsrを算出する。具体的には、下記(20)式及び(21)式により目標制動液圧差ΔPsf、ΔPsrを算出する。
ΔPsf=2・Kbf・(Ms・FRratio)/T ………(20)
ΔPsr=2・Kbr・(Ms×(1−FRratio))/T ………(21)
ここで、FRratioは設定用しきい値、Tはトレッド、Kbf及びKbrは制動力を制動液圧に換算する場合の前輪及び後輪についての換算係数である。
なお、上記トレッドTは、ここでは便宜上、前後同じ値として扱う。また、Kbf、Kbrは、ブレーキ諸元により定まる。
具体的には、制御の実施方向Dout_obstがLEFTの場合、すなわち左側の障害物SMに対する障害物回避制御を実施する場合には、下記(22)式により各車輪の目標制動液圧Psi(i=fl、fr、rl、rr)を算出する。
Psfl=Pmf,
Psfr=Pmf+ΔPsf,
Psrl=Pmr,
Psrr=Pmr+ΔPsr ………(22)
Psfl=Pmf+ΔPsf,
Psfr=Pmf,
Psrl=Pmr+ΔPsr,
Psrr=Pmr ………(23)
また、ここでは、(22)式及び(23)式が示すように、運転者によるブレーキ操作、すなわち制動液圧Pmf、Pmrを考慮して各車輪の目標制動液圧Psi(i=fl、fr、rl、rr)を算出している。
そして、制駆動力コントロールユニット8は、このようにして算出した各車輪の目標制動液圧Psi(i=fl、fr、rl、rr)を制動流体圧指令値として、制動流体圧制御部7に出力する。
次に、第1の実施形態の動作について説明する。
先ず、運転者の障害物側の隣接車線への車線変更の意図を検出する(図3のステップS35)。このとき、運転者に車線変更の意図が無いものとすると、車線変更意図検出フラグFchangeをOFFに設定するため、警報用調整ゲインαWL,αWR及び制御用調整ゲインαCL,αCRがそれぞれ"1"となる。また、前方注視時間Ttは、予め設定した基準値(ステップS60で設定した前方注視時間Tt)のままとなる(ステップS65)。
一方、運転者に障害物側の隣接車線への車線変更意図がある場合には、車線変更意図検出フラグFchangeをONに設定するため、警報用調整ゲインαWL,αWR及び制御用調整ゲインαCL,αCRはそれぞれ1より大きい値となる。このとき、運転者の車線変更意図の確度が高いほど、警報用調整ゲインαWL,αWR及び制御用調整ゲインαCL,αCRは大きい値となる。
このように、制御開始タイミングを早めることで、運転者への違和感を低減することができる。
また、運転者の車線変更意図の確度が高いほど、制御開始タイミングを早める量を大きくするので、より運転者に違和感を与えることなく支援制御の開始判定を行うことができる。
なお、図1において、レーダー装置24L/Rが側方障害物検出手段を構成している。また、図3のステップS35が車線変更意図検出手段を構成し、ステップS70が将来位置予測手段を構成し、ステップS65及びS100が開始タイミング変更手段を構成し、ステップS90、S110及びS120が障害物回避制御手段を構成する。
(1)側方障害物検出手段は、自車両の側方に存在する障害物を検出する。将来位置予測手段は、予め設定した所定時間後の自車両の将来位置を予測する。障害物回避制御手段は、側方障害物検出手段で障害物を検出している状態で、将来位置予測手段で予測した自車両の将来位置に基づいて、自車両が障害物の進路へ侵入する可能性が有ると判定すると、制御開始タイミングと判定して、側方障害物検出手段で検出した障害物への接近を防止する障害物回避制御を開始する。車線変更意図検出手段は、運転者の車線変更の意図を検出する。
このように、運転者の障害物の進路へ侵入する意図を検出した場合、障害物への接近を防止するための制御の制御開始タイミングを早くする。そのため、意図的に障害物へ接近した場合に、制御開始タイミングが遅いと感じるのを抑制することができる。
したがって、運転者への違和感のある制御開始を抑制しつつ、適切に障害物への接近を防止することができる。
(3)開始タイミング変更手段は、将来位置予測手段が自車両の将来位置を予測する際の前記所定時間を長くすることで、制御開始タイミングを早める。
これにより、比較的簡易に制御開始のタイミングを早くすることができる。
(5)車両運動制御は、自車両に対して前記障害物への接近を防止するようにヨーレートを付与する制御である。したがって、適切に障害物への接近を防止する障害物回避制御を行うことができる。
これにより、より確実に運転者の違和感を低減することができる。
(7)意図検出手段は、方向指示スイッチが検出する方向指示操作に基づいて、運転者の障害物の進路へ侵入する意図を検出する。
これにより、確実に運転者の車線変更の意図(運転者の障害物の進路へ侵入する意図)を検出することができる。
したがって、運転者への違和感のある制御開始を抑制しつつ、適切に障害物への接近を防止することができる。
次に、本発明の第2の実施形態について説明する。
この第2の実施形態は、前述した第1の実施形態において、前方注視時間Ttを調整することで制御開始タイミングを変更しているのに対し、自車両予測位置ΔXbを調整することで制御開始タイミングを変更するようにしたものである。
(構成)
第2の実施形態の基本構成は、前述した第1の実施形態と同様である。
図9は、第2の実施形態における制駆動力コントロールユニット8で実行する回避制御処理手順を示すフローチャートである。
ステップS70では、制駆動力コントロールユニット8は、自車両予測位置ΔXbを算出する。
ここでは、自車両予測位置ΔXbの算出処理を、前記ステップS35で設定した車線変更意図検出フラグFchangeに応じて区分する。
車線変更意図検出フラグFchangeに基づき、運転者の障害物SM側の隣接車線への車線変更の意図を検出しないと判定した場合には、前述した第1の実施形態と同様に、自車両予測位置ΔXbを算出し、ステップS80に移行する。つまり、上記(7)式、(10)式および(12)式の何れかを用いて自車両予測位置ΔXbを算出する。
車線変更意図検出フラグFchangeに基づき、運転者の障害物SM側の隣接車線への車線変更の意図を検出したと判定した場合には、以下に示す方法により、警報用調整ゲインαWL1〜αWL3,αWR1〜αWR3、及び制御用調整ゲインαCL1〜αCL3,αCR1〜αCR3を設定する。
そして、制御用調整ゲインαCL1〜αCL3,αCR1〜αCR3を掛けた設定ゲインK1,K2,K3を用いて、上記(7)式(10)式および(12)式の何れかをもとに、左用の自車両予測位置ΔXbLと右用の自車両予測位置ΔXbRとを算出する。
すなわち、ΔXbLの算出には、下記式で求めた設定ゲインK1〜K3を用いる。
K1=K1・αCL1,
K2=K2・αCL2,
K3=K3・αCL3 ………(24)
K1=K1・αCR1,
K2=K2・αCR2,
K3=K3・αCR3 ………(25)
ステップS100では、制駆動力コントロールユニット8は、警報発生の処理を行う。
先ず、前記ステップS90での検出に用いている前方注視時間Ttよりも長くなるように所定のゲインKbuzz(>1)を掛ける。
すなわち、ΔXbLの算出には、下記式で求めた設定ゲインK1〜K3を用いる。
K1=K1・αWL1,
K2=K2・αWL2,
K3=K3・αWL3 ………(26)
K1=K1・αWR1,
K2=K2・αWR2,
K3=K3・αWR3 ………(27)
このようにして算出した前方注視点が、前記ステップS90での制御開始の位置に到達したと判断すると警報を発生する。
次に、第2の実施形態の動作について説明する。
今、運転者に障害物SM側の隣接車線への車線変更の意図があるものとする。この場合には、警報用調整ゲイン及び制御用調整ゲインが1より大きい値となる。そして、この調整ゲインを用いて自車両予測位置ΔXbを算出する(ステップS70,S100)。このとき、前方注視点は、運転者に車線変更の意図がない場合と比較して、障害物側へ変更される。したがって、警報及び制御開始タイミングを早くして、運転者への違和感を低減することができる。
なお、図9のステップS70及びS100が開始タイミング変更手段を構成している。
(効果)
(9)開始タイミング変更手段は、将来位置予測手段で予測した自車両の将来位置を、車線幅方向で障害物側に補正することで、制御開始タイミングを早める。
これにより、比較的簡易に制御開始タイミングを早めることができる。
次に、本発明の第3の実施形態について説明する。
この第3の実施形態は、前述した第1及び第2の実施形態において、前方注視時間Ttや自車両予測位置ΔXbを調整することで制御開始タイミングを変更しているのに対し、制御判定閾値を調整することで制御開始タイミングを変更するようにしたものである。
(構成)
第3の実施形態の基本構成は、前述した第1及び第2の実施形態と同様である。
第3の実施形態における制駆動力コントロールユニット8では、図9に示す回避制御処理を実行する。
ステップS80では、制駆動力コントロールユニット8は、制御開始のための判定閾値を設定する。
ここでは、判定閾値である自車両MMと障害物SMとの横方向相対距離ΔOの設定処理を、前記ステップS35で設定した車線変更意図検出フラグFchangeに応じて区分する。
車線変更意図検出フラグFchangeに基づき、運転者の障害物SM側の隣接車線への車線変更の意図を検出しないと判定した場合には、前述した第1の実施形態と同様に、距離ΔOを設定し、ステップS90に移行する。つまり、距離ΔOは、レーダー装置24L/Rの検出値となる。
[車線変更意図検出フラグFchange=ONの場合]
車線変更意図検出フラグFchangeに基づき、運転者の障害物SM側の隣接車線への車線変更の意図を検出したと判定した場合には、以下に示す方法により、警報用調整ゲインαWL,αWR及び制御用調整ゲインαCL,αCRを設定する。
そして、制御用調整ゲインαCL,αCRを用いて距離ΔOを調整し、ステップS90に移行する。ここでは、左用の判定閾値である距離ΔOLと、右用の判定閾値である距離ΔORとを、下記式により算出する。
ΔOL ← ΔOL・αCL,
ΔOR ← ΔOR・αCR ………(28)
先ず、前記ステップS90での検出に用いている前方注視時間Ttよりも長くなるように所定のゲインKbuzz(>1)を掛ける。
そして、(Tt・Kbuzz)を用いて、左用の自車両予測位置ΔXbLと右用の自車両予測位置ΔXbRとを算出する。このようにして算出した前方注視点が、下記式によって算出した制御開始の位置に到達したと判断すると警報を発生する。
ΔOL ← ΔOL・αWL,
ΔOR ← ΔOR・αWR ………(29)
また、既定の閾値Xthreshを判定閾値として設定する場合には、このXthreshに警報用調整ゲインαWL,αWR及び制御用調整ゲインαCL,αCRを掛けて、警報及び制御の開始タイミングを早めることもできる。
次に、第3の実施形態の動作について説明する。
今、運転者に障害物側の隣接車線への車線変更の意図があるものとする。この場合には、警報用調整ゲイン及び制御用調整ゲインが1より小さい値となる。そして、この調整ゲインを用いて、制御開始のための判定閾値である自車両と障害物との横方向相対距離ΔOを算出する(ステップS80,S100)。このとき、制御開始のための判定閾値は、運転者に車線変更の意図がない場合と比較して、障害物とは反対側に変更される。したがって、警報及び制御開始のタイミングを早め、運転者への違和感を低減することができる。
なお、図9のステップS80及びS100が開始タイミング変更手段を構成している。
(10)開始タイミング変更手段は、所定の車線幅方向横位置を車線幅方向で障害物とは反対側に補正することで、制御開始タイミングを早める。
これにより、比較的簡易に制御開始タイミングを早めることができる。
(変形例)
(1)上記各実施形態においては、運転者に障害物側への車線変更意図がある場合に、車両運動制御及び警報発生制御の制御開始タイミングを早くする場合について説明したが、警報発生制御の開始判定のみを早めることもできる。この場合には、αCL=1,αCR=1とし、αWL及びαWRを車線変更意図の確度に応じて設定すればよい。これにより、運転者に障害物側への車線変更意図がある場合には、車線変更意図がない場合と比較して、警報の発生を早めることができるので、運転者の違和感を低減することができる。
車両運動制御及び警報発生制御の両方の開始タイミングを早くすると、車両運動制御が早めに開始されるため、例えば車線変更を途中でやめた場合であっても車両運動制御が介入することにより運転者が違和感を覚える可能性があるが、警報の発生のみを早めることで、このような違和感を低減することができる。
なお、車両運動制御の制御開始の判定のみを早めることで、警報発生制御を作動してから車両運動制御を作動するまでの時間を短くすることもできる。この場合には、αWL=1,αWR=1とし、αCL及びαCRを車線変更意図の確度に応じて設定すればよい。
図10は、制御禁止時間Tmask_Lの算出方法を説明するためのブロック図である。
第1制御禁止時間算出部8Bb_L1は、方向指示操作を検出してからの時間tTSIG_Lに基づいて、第1の制御禁止時間算出マップを参照して第1の制御禁止時間Tmask_L1を算出する。
第2制御禁止時間算出部8Bb_L2は、舵角操作変化量Δδに基づいて、第2の制御禁止時間算出マップを参照して第2の制御禁止時間Tmask_L2を算出する。
ここで、第3の制御禁止時間算出マップは、縦軸に第3の制御禁止時間Tmask_L3、横軸にヨーレート変化量Δφ’をとる。そして、左方向のヨーレート変化量Δφ’が所定量Δφ’1まではTmask_L3が最大値となり、所定量Δφ’1より小さい領域では、Δφ’が小さいほど(|Δφ’|が大きいほど)Tmask_L3が小さくなるように設定する。また、右方向のヨーレート変化が生じている場合(Δφ’>0)は、Tmask_L3を最大値とする。
ここで、第4の制御禁止時間算出マップは、縦軸に第4の制御禁止時間Tmask_L4、横軸に時間tANGLE_Lをとる。そして、時間tANGLE_Lが所定時間t2まではTmask_L4が最大値となり、所定時間t2を超える領域では、tANGLE_Lが大きいほどTmask_L4が小さくなるように設定する。
なお、第1〜第4の制御禁止時間Tmask_L1〜Tmask_L4には、それぞれ下限値を設ける。
また、同様に、制御禁止時間Tmask_Rは、時間tTSIG_Rが大きいほど、右方向の舵角操作変化量Δδが大きいほど、右方向のヨーレート変化量Δφ’が大きいほど、時間tANGLE_Rが大きいほど、小さくなるように設定する。
このように、運転者による車線変更意図の確度が大きいほど、制御禁止時間Tmask_L,Tmask_Rを短く算出する。
これにより、運転者に違和感を与えるような警報及び制御の早期作動を抑制することができる。
(8)上記各実施形態においては、制御開始判定手段8Bは自車両の将来位置(将来の横位置)が予め設定された所定の制御開始位置(車線幅方向横位置)に到達、若しくは制御開始位置よりも障害物側に位置することを検出したことで、障害物回避制御の制御開始を判定している。すなわち、障害物が走行している車線を障害物の進路として定義し、自車両の将来位置が予め設定された所定の制御開始位置に到達、若しくは制御開始位置よりも障害物側に位置することを検出した場合に、自車両が障害物の進路に侵入する可能性が有ると判定して、障害物回避制御の制御開始を判定しているものである。したがって、制御開始判定手段8Bは、自車両が障害物の進路へ侵入する可能性が有るか否かを判定し、自車両が障害物の進路へ侵入する可能性が有ると判定した場合に障害物回避制御の制御開始を判定するものであり、自車両が障害物の進路へ侵入する可能性が有ると判定するための方法は上記に限定されない。
このように、自車両が障害物の進路へ侵入する可能性が有ると判定するための方法は、適宜変更可能である。
3 マスタシリンダ
6FL〜6RR ホイールシリンダ
7 制動流体圧制御部
8 制駆動力コントロールユニット(障害物回避制御手段)
8A 将来位置予測手段
8B 制御開始判定手段
8Ba 開始タイミング調整手段(開始タイミング変更手段)
8Bb 車線変更意図検出手段(意図検出手段)
13 撮像部
21 ステアリングホイール
24L/R レーダー装置
30 流体圧回路
50 撮像装置
Claims (12)
- 自車両の側方に存在する障害物を検出する側方障害物検出手段と、
予め設定した所定時間後の自車両の将来位置を予測する将来位置予測手段と、
前記側方障害物検出手段で障害物を検出している状態で、前記将来位置予測手段で予測した自車両の将来位置に基づいて、自車両が前記障害物の進路へ侵入する可能性が有るか否かを判定し、自車両が前記障害物の進路へ侵入する可能性が有ると判定すると、制御開始タイミングと判定し、前記側方障害物検出手段で検出した障害物への接近を防止する障害物回避制御を開始する障害物回避制御手段と、
運転者の前記障害物の進路へ侵入する意図を検出すると共に、運転者の前記障害物の進路へ侵入する意図を検出した場合に、運転者の前記障害物の進路へ侵入する意図の確度を判定する意図検出手段と、を備え、
前記障害物回避制御手段は、
前記意図検出手段で運転者の前記障害物の進路へ侵入する意図を検出すると、前記意図検出手段で運転者の前記障害物の進路へ侵入する意図を非検出である場合と比較して、障害物回避制御の制御開始タイミングを早める開始タイミング変更手段を備え、
前記将来位置予測手段で予測した自車両の将来位置が、前記障害物の進路から予め定められた所定の距離以下となったとき、自車両が前記障害物の進路へ侵入する可能性が有ると判定し、
前記開始タイミング変更手段は、
前記意図検出手段で判定した前記障害物の進路へ侵入する意図の確度が高いほど、前記将来位置予測手段が自車両の将来位置を予測する際の前記所定時間を長くすることで、前記制御開始タイミングを早くすることを特徴とする車両運転支援装置。 - 自車両の側方に存在する障害物を検出する側方障害物検出手段と、
予め設定した所定時間後の自車両の将来位置を予測する将来位置予測手段と、
前記側方障害物検出手段で障害物を検出している状態で、前記将来位置予測手段で予測した自車両の将来位置に基づいて、自車両が前記障害物の進路へ侵入する可能性が有るか否かを判定し、自車両が前記障害物の進路へ侵入する可能性が有ると判定すると、制御開始タイミングと判定し、前記側方障害物検出手段で検出した障害物への接近を防止する障害物回避制御を開始する障害物回避制御手段と、
運転者の前記障害物の進路へ侵入する意図を検出すると共に、運転者の前記障害物の進路へ侵入する意図を検出した場合に、運転者の前記障害物の進路へ侵入する意図の確度を判定する意図検出手段と、を備え、
前記障害物回避制御手段は、
前記意図検出手段で運転者の前記障害物の進路へ侵入する意図を検出すると、前記意図検出手段で運転者の前記障害物の進路へ侵入する意図を非検出である場合と比較して、障害物回避制御の制御開始タイミングを早める開始タイミング変更手段と、
制御開始と判定した後、運転者の前記障害物の進路へ侵入する意図の確度が高いほど短く設定した制御禁止時間が経過するまでの間、前記障害物回避制御の開始を禁止する制御開始禁止手段とを備え、
前記将来位置予測手段で予測した自車両の将来位置が、前記障害物の進路から予め定められた所定の距離以下となったとき、自車両が前記障害物の進路へ侵入する可能性が有ると判定し、
前記開始タイミング変更手段は、
前記将来位置予測手段が自車両の将来位置を予測する際の前記所定時間を長くすることで、前記制御開始タイミングを早めることを特徴とする車両運転支援装置。 - 前記開始タイミング変更手段は、前記意図検出手段で判定した前記障害物の進路へ侵入する意図の確度が高いほど、前記制御開始タイミングを早くすることを特徴とする請求項2に記載の車両運転支援装置。
- 前記意図検出手段は、自車両の運転者の前記障害物が存在する側の隣接車線への車線変更の意図を検出した場合に、前記障害物の進路へ侵入する意図を検出することを特徴とする請求項1〜3の何れか1項に記載の車両運転支援装置。
- 前記障害物回避制御手段は、前記障害物回避制御として、前記障害物への接近を防止するように自車両を制御する車両運動制御と、当該車両運動制御に先立って運転者に対して警報を発する警報発生制御とを行うものであって、
前記開始タイミング変更手段は、前記警報発生制御の制御開始タイミングのみを早めることを特徴とする請求項1〜4の何れか1項に記載の車両運転支援装置。 - 前記障害物回避制御手段は、前記障害物回避制御として、前記障害物への接近を防止するように自車両を制御する車両運動制御と、当該車両運動制御に先立って運転者に対して警報を発する警報発生制御とを行うものであって、
前記開始タイミング変更手段は、少なくとも前記車両運動制御の制御開始タイミングを早めることで、前記警報発生制御を開始と判定してから前記車両運動制御を開始と判定するまでの時間を短くすることを特徴とする請求項1〜4の何れか1項に記載の車両運転支援装置。 - 前記車両運動制御は、自車両に対して前記障害物への接近を防止するようにヨーレートを付与する制御であることを特徴とする請求項5又は6に記載の車両運転支援装置。
- 前記意図検出手段は、方向指示スイッチが検出する方向指示操作に基づいて、運転者の前記障害物の進路へ侵入する意図を検出することを特徴とする請求項1〜7の何れか1項に記載の車両運転支援装置。
- 操舵角を検出する操舵角検出手段を備え、
前記意図検出手段は、前記操舵角検出手段で検出した操舵角に基づいて、運転者の前記障害物の進路へ侵入する意図を検出することを特徴とする請求項1〜7の何れか1項に記載の車両運転支援装置。 - 自車両に発生するヨーレートを検出するヨーレート検出手段を備え、
前記意図検出手段は、前記ヨーレート検出手段で検出したヨーレートに基づいて、運転者の前記障害物の進路へ侵入する意図を検出することを特徴とする請求項1〜7の何れか1項に記載の車両運転支援装置。 - 運転者の視線方向を検出する視線方向検出手段を備え、
前記意図検出手段は、前記視線方向検出手段で検出した視線方向に基づいて、運転者の前記障害物の進路へ侵入する意図を検出することを特徴とする請求項1〜7の何れか1項に記載の車両運転支援装置。 - 自車両側方の障害物を検出すると、予め設定した所定時間後の自車両の将来位置を予測し、その予測した自車両の将来位置が、前記障害物の進路から予め定められた所定の距離以下となったとき、自車両が前記障害物の進路へ侵入する可能性が有ると判定し、制御開始タイミングと判定して前記障害物への接近を防止する障害物回避制御を開始する際に、運転者の前記障害物の進路へ侵入する意図を検出した場合には、前記障害物の進路へ侵入する意図の確度が高いほど、自車両の将来位置を予測する際の前記所定時間を長くすることで、運転者の前記障害物の進路へ侵入する意図を非検出である場合と比較して、障害物回避制御の制御開始タイミングを早めることを特徴とする車両運転支援方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010057213A JP5407952B2 (ja) | 2009-06-18 | 2010-03-15 | 車両運転支援装置及び車両運転支援方法 |
| EP10006251.2A EP2263926B1 (en) | 2009-06-18 | 2010-06-16 | Vehicle operation supporting device and vehicle operation supporting method |
| US12/817,844 US8489286B2 (en) | 2009-06-18 | 2010-06-17 | Vehicle operation supporting device and vehicle operation supporting method |
| CN2010102119642A CN101927745B (zh) | 2009-06-18 | 2010-06-18 | 车辆操作支持装置和车辆操作支持方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009145244 | 2009-06-18 | ||
| JP2009145244 | 2009-06-18 | ||
| JP2010057213A JP5407952B2 (ja) | 2009-06-18 | 2010-03-15 | 車両運転支援装置及び車両運転支援方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011022990A JP2011022990A (ja) | 2011-02-03 |
| JP5407952B2 true JP5407952B2 (ja) | 2014-02-05 |
Family
ID=42710715
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010057213A Active JP5407952B2 (ja) | 2009-06-18 | 2010-03-15 | 車両運転支援装置及び車両運転支援方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8489286B2 (ja) |
| EP (1) | EP2263926B1 (ja) |
| JP (1) | JP5407952B2 (ja) |
| CN (1) | CN101927745B (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10843729B2 (en) | 2015-06-30 | 2020-11-24 | Denso Corporation | Deviation avoidance apparatus |
Families Citing this family (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5696444B2 (ja) | 2009-12-24 | 2015-04-08 | 日産自動車株式会社 | 走行制御装置 |
| JP5277346B2 (ja) * | 2010-03-04 | 2013-08-28 | 本田技研工業株式会社 | 車両の旋回制御装置 |
| JP5768442B2 (ja) * | 2011-03-29 | 2015-08-26 | 株式会社豊田中央研究所 | 車両運動制御装置及びプログラム |
| JP5577460B2 (ja) * | 2011-05-18 | 2014-08-20 | 本田技研工業株式会社 | 走行制御装置 |
| US9493114B2 (en) * | 2011-08-22 | 2016-11-15 | Toyota Jidosha Kabushiki Kaisha | Warning device for vehicle |
| RU2566175C1 (ru) * | 2011-08-31 | 2015-10-20 | Ниссан Мотор Ко., Лтд. | Устройство помощи при вождении транспортного средства |
| US20130103305A1 (en) * | 2011-10-19 | 2013-04-25 | Robert Bosch Gmbh | System for the navigation of oversized vehicles |
| JP5757900B2 (ja) * | 2012-03-07 | 2015-08-05 | 日立オートモティブシステムズ株式会社 | 車両走行制御装置 |
| JP6040638B2 (ja) * | 2012-08-28 | 2016-12-07 | 日産自動車株式会社 | 車両走行制御装置及びその方法 |
| KR101987636B1 (ko) * | 2012-11-09 | 2019-09-30 | 현대모비스 주식회사 | 차량의 충돌회피 제어 방법 및 이를 구현하는 충돌회피 장치 |
| JP6007748B2 (ja) * | 2012-11-22 | 2016-10-12 | マツダ株式会社 | 車両の運転支援装置 |
| CN102944881A (zh) * | 2012-11-29 | 2013-02-27 | 阮于华 | 汽车防撞激光雷达系统和汽车安全制动方法 |
| CN102991504B (zh) * | 2012-12-07 | 2015-06-03 | 长安大学 | 一种对驾驶员换道安全性进行判断并预警的方法 |
| JP2014227000A (ja) * | 2013-05-21 | 2014-12-08 | 日本電産エレシス株式会社 | 車両制御装置、その方法およびそのプログラム |
| JP6131813B2 (ja) * | 2013-10-03 | 2017-05-24 | 株式会社デンソー | 先行車選択装置 |
| CN103661591B (zh) * | 2013-11-29 | 2016-03-02 | 浙江吉利控股集团有限公司 | 一种智能转向控制方法和智能转向装置 |
| SE540272C2 (sv) * | 2014-04-01 | 2018-05-22 | Scania Cv Ab | Förfarande och system för att riskbedöma körfältsbyte vid framförande av ett ledande fordon på en vägbana med åtminstonetvå angränsande körfält |
| SE540270C2 (sv) * | 2014-04-01 | 2018-05-22 | Scania Cv Ab | Förfarande och system för att riskbedöma körfältsbyte vid framförande av ett ledande fordon på en vägbana med åtminstonetvå angränsande körfält |
| DE102014105374B4 (de) * | 2014-04-15 | 2017-02-09 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Fahrerassistenzsystem |
| DE102014213422A1 (de) * | 2014-07-10 | 2016-01-14 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Vermeidung eines Tunnelblicks |
| JP5883489B1 (ja) * | 2014-09-30 | 2016-03-15 | 富士重工業株式会社 | 車両の制御装置及び車両の制御方法 |
| CN104960468A (zh) * | 2015-05-27 | 2015-10-07 | 奇瑞汽车股份有限公司 | 一种行车变道方法和装置 |
| CN107848531B (zh) * | 2015-07-15 | 2020-12-25 | 本田技研工业株式会社 | 车辆控制装置、车辆控制方法及存储车辆控制程序的介质 |
| CN105151044B (zh) * | 2015-08-24 | 2019-01-01 | 奇瑞汽车股份有限公司 | 车辆辅助驾驶方法及装置 |
| JP6549940B2 (ja) * | 2015-08-31 | 2019-07-24 | 株式会社Subaru | 車両の挙動制御装置及び車両の挙動制御方法 |
| CN106646491B (zh) * | 2015-10-30 | 2019-11-29 | 长城汽车股份有限公司 | 一种超声波防撞雷达系统及其障碍物定位方法 |
| DE102016205141A1 (de) * | 2015-11-04 | 2017-05-04 | Volkswagen Aktiengesellschaft | Verfahren und Fahrzeugkommunikationssystem zum Bestimmen einer Fahrintention für ein Fahrzeug |
| KR102480989B1 (ko) * | 2016-01-21 | 2022-12-26 | 엘지전자 주식회사 | 차량용 디스플레이 장치 및 그 동작 방법 |
| JP6731619B2 (ja) * | 2016-10-26 | 2020-07-29 | パナソニックIpマネジメント株式会社 | 情報処理システム、情報処理方法、およびプログラム |
| US10160448B2 (en) * | 2016-11-08 | 2018-12-25 | Ford Global Technologies, Llc | Object tracking using sensor fusion within a probabilistic framework |
| US10692252B2 (en) * | 2017-02-09 | 2020-06-23 | GM Global Technology Operations LLC | Integrated interface for situation awareness information alert, advise, and inform |
| US10814913B2 (en) | 2017-04-12 | 2020-10-27 | Toyota Jidosha Kabushiki Kaisha | Lane change assist apparatus for vehicle |
| JP6791021B2 (ja) * | 2017-06-06 | 2020-11-25 | トヨタ自動車株式会社 | 操舵支援装置 |
| JP6627822B2 (ja) * | 2017-06-06 | 2020-01-08 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP6642522B2 (ja) * | 2017-06-06 | 2020-02-05 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP6627821B2 (ja) | 2017-06-06 | 2020-01-08 | トヨタ自動車株式会社 | 車線変更支援装置 |
| JP2019003234A (ja) * | 2017-06-09 | 2019-01-10 | トヨタ自動車株式会社 | 運転支援装置 |
| JP6841248B2 (ja) * | 2018-02-13 | 2021-03-10 | トヨタ自動車株式会社 | 自動運転システム |
| CN108399394A (zh) * | 2018-03-12 | 2018-08-14 | 海信集团有限公司 | 障碍物预警方法、装置及终端 |
| JP2019156269A (ja) * | 2018-03-15 | 2019-09-19 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、及びプログラム |
| JP7014032B2 (ja) | 2018-04-23 | 2022-02-01 | 株式会社デンソー | 車両衝突推定装置 |
| EP3575171B8 (en) | 2018-05-28 | 2025-02-19 | Qualcomm Auto Ltd. | Vehicle collision avoidance method and system |
| JP2020052646A (ja) * | 2018-09-26 | 2020-04-02 | トヨタ自動車株式会社 | 車両制御装置 |
| WO2020062034A1 (en) * | 2018-09-28 | 2020-04-02 | Baidu.Com Times Technology (Beijing) Co., Ltd. | A tunnel-based planning system for autonomous driving vehicles |
| CN109263557B (zh) * | 2018-11-19 | 2020-10-09 | 威盛电子股份有限公司 | 车辆盲区侦测方法 |
| US12036978B2 (en) * | 2019-01-15 | 2024-07-16 | Nissan Motor Co., Ltd. | Driving assistance method and driving assistance device |
| JP2020157793A (ja) * | 2019-03-25 | 2020-10-01 | パナソニックIpマネジメント株式会社 | 障害物回避制御装置、車両、障害物回避制御方法、および障害物回避制御プログラム |
| JP7260385B2 (ja) * | 2019-04-24 | 2023-04-18 | トヨタ自動車株式会社 | 車両走行制御装置 |
| US12286105B2 (en) * | 2019-05-01 | 2025-04-29 | Steering Solutions Ip Holding Corporation | Torque based vehicle path prediction |
| CN110723140B (zh) * | 2019-09-18 | 2021-03-09 | 爱驰汽车有限公司 | 变道过程中的车辆控制方法、装置及计算设备 |
| US11718296B2 (en) | 2019-12-09 | 2023-08-08 | Bendix Commercial Vehicle Systems Llc | Using shared traffic information to support adaptive cruise control (ACC) between platooning vehicles |
| JP7484848B2 (ja) * | 2021-08-24 | 2024-05-16 | トヨタ自動車株式会社 | 遠隔運転者の支援方法、支援システム、及びプログラム |
| CN113682226B (zh) * | 2021-09-16 | 2023-05-26 | 岚图汽车科技有限公司 | 盲区监测和变道提醒方法、装置、设备以及可读存储介质 |
| JP7633605B2 (ja) * | 2021-11-24 | 2025-02-20 | トヨタ自動車株式会社 | 車線逸脱防止装置 |
| JP7601046B2 (ja) * | 2022-04-06 | 2024-12-17 | トヨタ自動車株式会社 | 車両制御装置、車両制御用コンピュータプログラム及び車両制御方法 |
| CN114906170B (zh) * | 2022-05-31 | 2026-04-10 | 上海商汤临港智能科技有限公司 | 一种运动规划的方法、装置、电子设备及存储介质 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3183966B2 (ja) * | 1992-04-20 | 2001-07-09 | マツダ株式会社 | 車両の走行制御装置 |
| JP3716905B2 (ja) * | 1999-12-14 | 2005-11-16 | 三菱自動車工業株式会社 | 車線逸脱警報装置 |
| JP2002109694A (ja) * | 2000-09-29 | 2002-04-12 | Mitsubishi Motors Corp | 運転支援システム |
| JP2002331850A (ja) * | 2001-05-07 | 2002-11-19 | Nissan Motor Co Ltd | 運転行動意図検出装置 |
| JP3571014B2 (ja) * | 2001-08-30 | 2004-09-29 | 本田技研工業株式会社 | 内燃機関の自動停止始動制御装置 |
| JP4037722B2 (ja) * | 2002-09-18 | 2008-01-23 | 富士重工業株式会社 | 車外監視装置、及び、この車外監視装置を備えた走行制御装置 |
| JP4461780B2 (ja) * | 2003-07-07 | 2010-05-12 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP3903978B2 (ja) | 2003-10-23 | 2007-04-11 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4389567B2 (ja) * | 2003-12-03 | 2009-12-24 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP3960317B2 (ja) * | 2004-03-03 | 2007-08-15 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備えた車両 |
| JP4169022B2 (ja) * | 2005-08-05 | 2008-10-22 | 日産自動車株式会社 | 車両用運転操作補助装置および車両用運転操作補助装置を備える車両 |
| ATE519647T1 (de) * | 2006-06-11 | 2011-08-15 | Volvo Technology Corp | Verfahren und vorrichtung zur verwendung eines automatisierten spurhaltesystems zur bewahrung von seitlichem fahrzeugabstand |
| JP2008059052A (ja) * | 2006-08-29 | 2008-03-13 | Renesas Technology Corp | 半導体集積回路及びマイクロコンピュータ |
| DE102007001117A1 (de) * | 2007-01-04 | 2008-07-10 | Robert Bosch Gmbh | Verfahren für die Steuerung eines Fahrerassistenzsystems |
| JP2009012493A (ja) * | 2007-06-29 | 2009-01-22 | Hitachi Ltd | 車両運転補助装置 |
| JP4946807B2 (ja) * | 2007-11-07 | 2012-06-06 | トヨタ自動車株式会社 | 車線逸脱防止制御装置 |
| JP2009262738A (ja) * | 2008-04-24 | 2009-11-12 | Mazda Motor Corp | 車両の車線逸脱警報装置 |
| JP5177076B2 (ja) * | 2008-07-28 | 2013-04-03 | 日産自動車株式会社 | 車両運転支援装置及び車両運転支援方法 |
-
2010
- 2010-03-15 JP JP2010057213A patent/JP5407952B2/ja active Active
- 2010-06-16 EP EP10006251.2A patent/EP2263926B1/en active Active
- 2010-06-17 US US12/817,844 patent/US8489286B2/en active Active
- 2010-06-18 CN CN2010102119642A patent/CN101927745B/zh active Active
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10843729B2 (en) | 2015-06-30 | 2020-11-24 | Denso Corporation | Deviation avoidance apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| US8489286B2 (en) | 2013-07-16 |
| JP2011022990A (ja) | 2011-02-03 |
| EP2263926B1 (en) | 2013-08-14 |
| EP2263926A3 (en) | 2012-05-16 |
| US20100324823A1 (en) | 2010-12-23 |
| EP2263926A2 (en) | 2010-12-22 |
| CN101927745B (zh) | 2012-11-14 |
| CN101927745A (zh) | 2010-12-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5407952B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP5088350B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP5177076B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP5278378B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP5359516B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP5375752B2 (ja) | 車両運転支援装置 | |
| JP5630583B2 (ja) | 車両運転支援装置 | |
| US8812192B2 (en) | Lane departure prevention system | |
| US20080172153A1 (en) | Lane departure prevention apparatus | |
| JP5359092B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP5287007B2 (ja) | 車線逸脱防止装置及びその方法 | |
| JP5256907B2 (ja) | 車線逸脱防止装置及びその方法 | |
| JP5309764B2 (ja) | 側方障害物回避装置及び側方障害物回避方法 | |
| JP2006182129A (ja) | 車線逸脱防止装置 | |
| JP5387204B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP2007030696A (ja) | 運転者車線変更意思判定方法及び車線逸脱防止装置 | |
| JP4601946B2 (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120328 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130611 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130612 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130801 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20131008 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20131021 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5407952 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |