JP5286004B2 - 基板の検査装置、および、基板の検査方法 - Google Patents
基板の検査装置、および、基板の検査方法 Download PDFInfo
- Publication number
- JP5286004B2 JP5286004B2 JP2008234270A JP2008234270A JP5286004B2 JP 5286004 B2 JP5286004 B2 JP 5286004B2 JP 2008234270 A JP2008234270 A JP 2008234270A JP 2008234270 A JP2008234270 A JP 2008234270A JP 5286004 B2 JP5286004 B2 JP 5286004B2
- Authority
- JP
- Japan
- Prior art keywords
- stage
- charged particle
- particle beam
- scanning
- inspection
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images











Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/28—Electron or ion microscopes; Electron or ion diffraction tubes with scanning beams
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/02—Details
- H01J37/20—Means for supporting or positioning the object or the material; Means for adjusting diaphragms or lenses associated with the support
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J37/00—Discharge tubes with provision for introducing objects or material to be exposed to the discharge, e.g. for the purpose of examination or processing thereof
- H01J37/26—Electron or ion microscopes; Electron or ion diffraction tubes
- H01J37/261—Details
- H01J37/265—Controlling the tube; circuit arrangements adapted to a particular application not otherwise provided, e.g. bright-field-dark-field illumination
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/20—Positioning, supporting, modifying or maintaining the physical state of objects being observed or treated
- H01J2237/202—Movement
- H01J2237/20278—Motorised movement
- H01J2237/20285—Motorised movement computer-controlled
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01J—ELECTRIC DISCHARGE TUBES OR DISCHARGE LAMPS
- H01J2237/00—Discharge tubes exposing object to beam, e.g. for analysis treatment, etching, imaging
- H01J2237/26—Electron or ion microscopes
- H01J2237/28—Scanning microscopes
- H01J2237/2813—Scanning microscopes characterised by the application
- H01J2237/2817—Pattern inspection
Landscapes
- Chemical & Material Sciences (AREA)
- Analytical Chemistry (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
- Analysing Materials By The Use Of Radiation (AREA)
Description
V≦(P/L)V0 ・・・ 〔数式2〕
例えば、幅L=10μm、視野M=100μm、ピッチP=60μmと仮定すると、数1からV≦11×V0、または、V≦6×V0となり、ストライプ領域53の全ての画像を検出する場合に比べて、最大6倍も高速にステージ移動させても、ROI検出領域54の画像取得が可能である。
Claims (9)
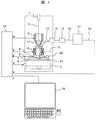
- 所定パターンが形成された領域を複数備える被検査試料に対し、荷電粒子線を当該被検査試料が載置されたステージの移動方向と交差する方向に走査し、当該走査により前記被検査試料から発生する二次電子または反射電子を検出して得られる信号をもとに検査画像を取得し、当該検査画像を用いて前記被検査試料を検査する荷電粒子線装置において、
前記走査の方向を制御する走査偏向器を備えた荷電粒子カラムと、
前記ステージの移動速度を制御するステージ制御手段とを備え、
前記ステージの移動中に、前記所定パターンが形成された領域の一部分であって該領域の端部を含む複数の検査領域を選択的にサンプリングして前記検査画像を取得し、
前記ステージ制御手段は、前記所定パターンが形成された領域の一部分を選択的にサンプリングするときは前記パターンが形成された領域の全てをサンプリングして検査するときよりも前記ステージの移動速度を速くし、
前記荷電粒子線カラムは、前記ステージの移動方向と同じ方向への荷電粒子線の偏向を行いながら前記走査を実行することにより、前記サンプリングにより選択された検査領域に前記荷電粒子線を照射することを特徴とする荷電粒子線装置。 - 所定パターンが形成された領域を複数備える被検査試料に対し、荷電粒子線を当該被検査試料が載置されたステージの移動方向と交差する方向に走査し、当該走査により前記被検査試料から発生する二次電子または反射電子を検出して得られる信号をもとに検査画像を取得し、当該検査画像を用いて前記被検査試料を検査する荷電粒子線装置において、
前記ステージの移動速度を制御するステージ制御手段を備え、
前記走査が複数回実行される走査領域と、前記走査が実行されない走査スキップ領域とが前記領域に設定され、
前記ステージ制御手段は、前記ステージの移動方向での前記走査領域の幅と、前記走査スキップ領域の幅との比に対応して、前記ステージの移動速度を設定することを特徴とする荷電粒子線装置。 - 所定パターンが形成された領域を複数備える被検査試料に対し、荷電粒子線を当該被検査試料が載置されたステージの移動方向と交差する方向に走査し、当該走査により前記被検査試料から発生する二次電子または反射電子を検出して得られる信号をもとに検査画像を取得し、当該検査画像を用いて前記被検査試料を検査する荷電粒子線装置において、
前記ステージの移動速度を制御するステージ制御手段を備え、
前記走査が複数回実行される第1の走査領域と第2の走査領域とが、前記走査が実行されない走査スキップ領域を挟んで、前記領域上に設定され、
前記ステージ制御手段は、前記第1の走査領域の終端と前記第2の走査領域の開始端とが、前記ステージ移動方向への前記荷電粒子線走査範囲内で収差、歪が同一とみなせる視野内に収まるように、前記ステージの移動速度を設定することを特徴とする荷電粒子線装置。 - 請求項1に記載の荷電粒子線装置において、
前記ステージ制御手段は、前記サンプリングにより画像が取得される第1の領域の走査終端と、当該第1の領域よりも後に画像が取得される第2の領域の走査開始端とが、前記ステージ移動方向への前記荷電粒子線走査範囲内で収差、歪が同一とみなせる視野内に収まるように前記ステージの移動速度を設定することを特徴とする荷電粒子線装置。 - 請求項1に記載の荷電粒子線装置において、
前記複数の検査領域は、前記走査が実行されない走査スキップ領域を含むことを特徴とする荷電粒子線装置。 - 請求項1に記載の荷電粒子線装置において、
前記ステージの移動方向に対する前記検査領域の幅が前記視野内に収まるようにステージ移動速度を制御する前記ステージ制御手段を備えたことを特徴とする荷電粒子線装置。 - 請求項1に記載の荷電粒子線装置において、
前記サンプリングの領域設定画面が表示される画面表示手段を備えたことを特徴とする荷電粒子線装置。 - 請求項1に記載の荷電粒子線装置において、
前記試料ステージは、複数のメモリセルにより構成される複数のメモリマットが形成された半導体ウェーハを載置することが可能なステージであることを特徴とする荷電粒子線装置。 - 請求項8に記載の荷電粒子線装置において、
前記複数のメモリマットのうち、1のメモリマットが表示される表示ウィンドウを備えた前記サンプリングの領域設定画面の表示手段を有し、
当該表示されたメモリマット上で設定された前記サンプリングの領域を、前記メモリセルの配置の規則性に基づき他のメモリマットに展開することにより、前記複数の検査領域に対するサンプリングを実行することを特徴とする荷電粒子線装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008234270A JP5286004B2 (ja) | 2008-09-12 | 2008-09-12 | 基板の検査装置、および、基板の検査方法 |
| PCT/JP2009/004205 WO2010029700A1 (ja) | 2008-09-12 | 2009-08-28 | 荷電粒子線装置 |
| US13/061,031 US8421010B2 (en) | 2008-09-12 | 2009-08-28 | Charged particle beam device for scanning a sample using a charged particle beam to inspect the sample |
| KR1020117003654A KR101242319B1 (ko) | 2008-09-12 | 2009-08-28 | 하전 입자선 장치 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008234270A JP5286004B2 (ja) | 2008-09-12 | 2008-09-12 | 基板の検査装置、および、基板の検査方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010067533A JP2010067533A (ja) | 2010-03-25 |
| JP2010067533A5 JP2010067533A5 (ja) | 2012-02-02 |
| JP5286004B2 true JP5286004B2 (ja) | 2013-09-11 |
Family
ID=42004966
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008234270A Active JP5286004B2 (ja) | 2008-09-12 | 2008-09-12 | 基板の検査装置、および、基板の検査方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US8421010B2 (ja) |
| JP (1) | JP5286004B2 (ja) |
| KR (1) | KR101242319B1 (ja) |
| WO (1) | WO2010029700A1 (ja) |
Families Citing this family (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011154918A (ja) * | 2010-01-28 | 2011-08-11 | Hitachi High-Technologies Corp | 荷電粒子線装置 |
| JP2011158439A (ja) * | 2010-02-04 | 2011-08-18 | Hitachi High-Technologies Corp | 電子線を用いた外観検査装置 |
| JP5722551B2 (ja) * | 2010-05-13 | 2015-05-20 | 株式会社日立ハイテクノロジーズ | 欠陥検査方法及びその装置 |
| KR20120045774A (ko) * | 2010-11-01 | 2012-05-09 | 삼성전자주식회사 | 웨이퍼 검사 방법 |
| JP5537448B2 (ja) * | 2011-01-21 | 2014-07-02 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置、及び画像解析装置 |
| JP5684612B2 (ja) * | 2011-03-09 | 2015-03-18 | 株式会社日立ハイテクサイエンス | X線分析装置 |
| US9208552B2 (en) * | 2011-04-26 | 2015-12-08 | Kla-Tencor Corporation | Method and system for hybrid reticle inspection |
| EP3528276A3 (en) * | 2011-05-13 | 2019-09-04 | Fibics Incorporated | Microscopy imaging method |
| JP5460662B2 (ja) | 2011-09-07 | 2014-04-02 | 株式会社日立ハイテクノロジーズ | 領域決定装置、観察装置または検査装置、領域決定方法および領域決定方法を用いた観察方法または検査方法 |
| JP6078234B2 (ja) * | 2012-04-13 | 2017-02-08 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP5948262B2 (ja) * | 2013-01-30 | 2016-07-06 | 株式会社日立ハイテクノロジーズ | 欠陥観察方法および欠陥観察装置 |
| KR101709433B1 (ko) * | 2013-04-22 | 2017-02-22 | 가부시키가이샤 히다치 하이테크놀로지즈 | 시료 관찰 장치 |
| JP6147079B2 (ja) * | 2013-05-14 | 2017-06-14 | オリンパス株式会社 | 顕微鏡システム、貼り合わせ領域の決定方法、及び、プログラム |
| CN105453242B (zh) * | 2013-08-14 | 2017-09-22 | 株式会社日立制作所 | 半导体检查方法、半导体检查装置以及半导体元件的制造方法 |
| US9697987B2 (en) | 2013-09-26 | 2017-07-04 | Hitachi High-Technologies Corporation | Charged particle beam device |
| JP6266360B2 (ja) * | 2014-01-27 | 2018-01-24 | 株式会社日立ハイテクノロジーズ | 画像処理装置および荷電粒子線装置 |
| CN106199746A (zh) * | 2015-05-07 | 2016-12-07 | 上海高晶影像科技有限公司 | 一种使现有安检机成倍提高检测速度的方法 |
| WO2017187548A1 (ja) * | 2016-04-27 | 2017-11-02 | 株式会社日立ハイテクノロジーズ | 荷電粒子線装置 |
| JP6897042B2 (ja) * | 2016-09-27 | 2021-06-30 | 日本電気株式会社 | 画像検査装置、画像検査方法および画像検査プログラム |
| JP2020181629A (ja) * | 2017-07-27 | 2020-11-05 | 株式会社日立ハイテク | 電子線観察装置、電子線観察システム及び電子線観察装置の制御方法 |
| US11776859B2 (en) * | 2018-12-19 | 2023-10-03 | Kla Corporation | Care area based swath speed for throughput and sensitivity improvement |
| JP2021197257A (ja) * | 2020-06-12 | 2021-12-27 | 株式会社日立ハイテク | 荷電粒子ビーム装置 |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6172363B1 (en) * | 1996-03-05 | 2001-01-09 | Hitachi, Ltd. | Method and apparatus for inspecting integrated circuit pattern |
| US6107637A (en) * | 1997-08-11 | 2000-08-22 | Hitachi, Ltd. | Electron beam exposure or system inspection or measurement apparatus and its method and height detection apparatus |
| JP4002655B2 (ja) * | 1998-01-06 | 2007-11-07 | 株式会社日立製作所 | パターン検査方法およびその装置 |
| US6476913B1 (en) * | 1998-11-30 | 2002-11-05 | Hitachi, Ltd. | Inspection method, apparatus and system for circuit pattern |
| JP4035242B2 (ja) * | 1998-11-30 | 2008-01-16 | 株式会社日立製作所 | 回路パターンの検査方法及び検査装置 |
| US6252412B1 (en) * | 1999-01-08 | 2001-06-26 | Schlumberger Technologies, Inc. | Method of detecting defects in patterned substrates |
| US6538249B1 (en) * | 1999-07-09 | 2003-03-25 | Hitachi, Ltd. | Image-formation apparatus using charged particle beams under various focus conditions |
| JP2001148016A (ja) * | 1999-11-22 | 2001-05-29 | Hitachi Ltd | 試料検査装置,試料表示装置、および試料表示方法 |
| JP2001147114A (ja) * | 1999-11-24 | 2001-05-29 | Hitachi Ltd | 回路パターンの検査装置、および検査方法 |
| US20070131877A9 (en) * | 1999-11-29 | 2007-06-14 | Takashi Hiroi | Pattern inspection method and system therefor |
| JP2002026093A (ja) * | 2000-07-10 | 2002-01-25 | Hitachi Ltd | 半導体装置の製造方法 |
| JP3951590B2 (ja) * | 2000-10-27 | 2007-08-01 | 株式会社日立製作所 | 荷電粒子線装置 |
| EP1273907A4 (en) * | 2000-11-17 | 2006-08-30 | Ebara Corp | METHOD AND INSTRUMENT FOR WAFER INSPECTION AND ELECTRON BEAM |
| JP3973372B2 (ja) * | 2001-03-23 | 2007-09-12 | 株式会社日立製作所 | 荷電粒子線を用いた基板検査装置および基板検査方法 |
| US7361894B2 (en) * | 2002-10-22 | 2008-04-22 | Hitachi High-Technologies Corporation | Method of forming a sample image and charged particle beam apparatus |
| EP1455378B1 (en) * | 2001-11-21 | 2013-08-14 | Hitachi High-Technologies Corporation | Sample imaging method and charged particle beam system |
| WO2003044821A1 (en) * | 2001-11-21 | 2003-05-30 | Hitachi High-Technologies Corporation | Sample imaging method and charged particle beam system |
| US7138629B2 (en) * | 2003-04-22 | 2006-11-21 | Ebara Corporation | Testing apparatus using charged particles and device manufacturing method using the testing apparatus |
| JP4154282B2 (ja) * | 2003-05-14 | 2008-09-24 | 株式会社日立ハイテクノロジーズ | 回路パターンの検査装置 |
| JP4564728B2 (ja) * | 2003-07-25 | 2010-10-20 | 株式会社日立ハイテクノロジーズ | 回路パターンの検査装置 |
| JP4564768B2 (ja) | 2004-03-23 | 2010-10-20 | 株式会社日立ハイテクノロジーズ | パターン検査方法及びその装置 |
| US20060171593A1 (en) * | 2005-02-01 | 2006-08-03 | Hitachi High-Technologies Corporation | Inspection apparatus for inspecting patterns of a substrate |
| JP5403852B2 (ja) * | 2005-08-12 | 2014-01-29 | 株式会社荏原製作所 | 検出装置及び検査装置 |
| JP4606969B2 (ja) * | 2005-08-17 | 2011-01-05 | 株式会社日立ハイテクノロジーズ | 写像投影型電子線式検査装置及びその方法 |
| JP4685599B2 (ja) * | 2005-11-11 | 2011-05-18 | 株式会社日立ハイテクノロジーズ | 回路パターンの検査装置 |
| JP2007180090A (ja) * | 2005-12-27 | 2007-07-12 | Ebara Corp | スループットを向上させる評価方法及び電子線装置 |
| JP4797140B2 (ja) | 2007-01-18 | 2011-10-19 | 独立行政法人国立がん研究センター | 荷電粒子線照射装置 |
| JP4972472B2 (ja) * | 2007-06-13 | 2012-07-11 | 株式会社日立ハイテクノロジーズ | 半導体検査装置 |
| JP4922962B2 (ja) * | 2008-02-14 | 2012-04-25 | 株式会社日立ハイテクノロジーズ | 回路パターンの検査方法及び検査装置 |
| JP4728361B2 (ja) | 2008-03-06 | 2011-07-20 | 株式会社日立製作所 | 荷電粒子線を用いた基板検査装置および基板検査方法 |
-
2008
- 2008-09-12 JP JP2008234270A patent/JP5286004B2/ja active Active
-
2009
- 2009-08-28 US US13/061,031 patent/US8421010B2/en active Active
- 2009-08-28 KR KR1020117003654A patent/KR101242319B1/ko active Active
- 2009-08-28 WO PCT/JP2009/004205 patent/WO2010029700A1/ja not_active Ceased
Also Published As
| Publication number | Publication date |
|---|---|
| KR20110036619A (ko) | 2011-04-07 |
| US8421010B2 (en) | 2013-04-16 |
| KR101242319B1 (ko) | 2013-03-11 |
| WO2010029700A1 (ja) | 2010-03-18 |
| JP2010067533A (ja) | 2010-03-25 |
| US20110163230A1 (en) | 2011-07-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5286004B2 (ja) | 基板の検査装置、および、基板の検査方法 | |
| JP3534582B2 (ja) | パターン欠陥検査方法および検査装置 | |
| JP5202071B2 (ja) | 荷電粒子顕微鏡装置及びそれを用いた画像処理方法 | |
| US10840060B2 (en) | Scanning electron microscope and sample observation method | |
| JP5164317B2 (ja) | 電子線による検査・計測方法および検査・計測装置 | |
| US7932493B2 (en) | Method and system for observing a specimen using a scanning electron microscope | |
| JP5414215B2 (ja) | 回路パターン検査装置、および回路パターンの検査方法 | |
| JPH09320505A (ja) | 電子線式検査方法及びその装置並びに半導体の製造方法及びその製造ライン | |
| US7351968B1 (en) | Multi-pixel electron emission die-to-die inspection | |
| JPWO2011155122A1 (ja) | 回路パターン検査装置およびその検査方法 | |
| US8754664B2 (en) | Inspection method and device | |
| JP2008251766A (ja) | 半導体デバイスの欠陥観察方法及びその装置 | |
| US6828571B1 (en) | Apparatus and methods of controlling surface charge and focus | |
| JP2019145511A (ja) | 電子ビーム装置 | |
| KR20130026503A (ko) | 하전 입자 빔 현미경 | |
| US20070047800A1 (en) | Method and apparatus for inspecting defects of circuit patterns | |
| WO2011092770A1 (ja) | 荷電粒子線装置 | |
| KR20230142591A (ko) | 고해상도 x-선 분광법 표면 물질 분석 | |
| US20110291009A1 (en) | Semiconductor inspection method and device that consider the effects of electron beams | |
| JP2000286310A (ja) | パターン欠陥検査方法および検査装置 | |
| JP4028864B2 (ja) | パターン欠陥検査方法および検査装置 | |
| US12237145B2 (en) | Charged particle beam device and inspection device | |
| TWI862021B (zh) | 檢查方法及帶電粒子線裝置 | |
| JP3608451B2 (ja) | 走査電子顕微鏡を用いた検査装置および検査方法 | |
| JP2004151119A (ja) | パターン欠陥検査方法および検査装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110214 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111213 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120703 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120830 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130315 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130603 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5286004 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |