JP5281126B2 - レゾルバによる角度検出方法 - Google Patents
レゾルバによる角度検出方法 Download PDFInfo
- Publication number
- JP5281126B2 JP5281126B2 JP2011156428A JP2011156428A JP5281126B2 JP 5281126 B2 JP5281126 B2 JP 5281126B2 JP 2011156428 A JP2011156428 A JP 2011156428A JP 2011156428 A JP2011156428 A JP 2011156428A JP 5281126 B2 JP5281126 B2 JP 5281126B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- time
- resolver
- detection process
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 title claims description 137
- 238000000034 method Methods 0.000 claims description 84
- 230000005284 excitation Effects 0.000 claims description 62
- 230000000694 effects Effects 0.000 description 15
- 238000005070 sampling Methods 0.000 description 13
- 230000014509 gene expression Effects 0.000 description 11
- 238000004519 manufacturing process Methods 0.000 description 8
- 230000001360 synchronised effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 5
- 238000006243 chemical reaction Methods 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 230000000737 periodic effect Effects 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 238000003672 processing method Methods 0.000 description 1
Images







Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01D—MEASURING NOT SPECIALLY ADAPTED FOR A SPECIFIC VARIABLE; ARRANGEMENTS FOR MEASURING TWO OR MORE VARIABLES NOT COVERED IN A SINGLE OTHER SUBCLASS; TARIFF METERING APPARATUS; MEASURING OR TESTING NOT OTHERWISE PROVIDED FOR
- G01D5/00—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable
- G01D5/12—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means
- G01D5/14—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage
- G01D5/20—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature
- G01D5/204—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils
- G01D5/2073—Mechanical means for transferring the output of a sensing member; Means for converting the output of a sensing member to another variable where the form or nature of the sensing member does not constrain the means for converting; Transducers not specially adapted for a specific variable using electric or magnetic means influencing the magnitude of a current or voltage by varying inductance, e.g. by a movable armature by influencing the mutual induction between two or more coils by movement of a single coil with respect to two or more coils
Description
1相励磁2相出力のレゾルバによる角度検出は、第1の信号及び第2の信号を符号付で検出し、この第1の信号と第2の信号を入力とする4象限逆正接(atan2)を利用し、レゾル
バ・デジタル変換(以下RD変換という。)をしている。
例えば、第1の信号がcos信号、第2の信号がsin信号であった場合、4象限逆正接では、cos信号とsin信号のいずれもが正であれば第1象限、cos信号が負でsin信号が正であれば第2象限、cos信号が負でsin信号が負であれば第3象限、cos信号が正でsin信号が負であれば第4象限、と場合分けすることによって、-180〜+180度の範囲で回転角度が得られる。この4象限逆正接を用いたRD変換によって回転角度を得ることができる。
信号の振幅ピーク発生時刻を挟んだ所定のタイミングで、2相信号の各相の信号をそれぞれサンプリングする工程と、各相の信号間のサンプリング・タイミングのずれによる誤差補正を行いつつ、サンプリングされた前記それぞれの信号に基づいて角度を演算する工程とを備えるようにしている。
このような従来の角度検出方法では、それぞれ連続して行った2度のサンプリングのタイミングが、ピークを挟んで、それぞれピークから等しい時間だけずれるようにしているので、2相出力の第1の信号と第2の信号を同時に検出することなく、第1の信号と第2の信号の振幅比を正確に検出できるようになり、その結果、複数信号を同時検出できる機能を有するマイクロコンピュータや、サンプルホールド回路等のハードウェアを用いることなく、正確な回転角度を得ることができるとされている。
このような従来の角度検出方法では、角度検出の精度を保つために、サンプリングのタイミングを調整したり、励磁信号の位相を調整する必要があった。
また、通常、レゾルバの2相信号の振幅ピーク発生時刻は励磁信号と一定の位相差を保っているが、この位相差は製造ばらつきなどによって個々に異なったり、レゾルバの温度変化によって変化したりするため、固体毎に微調整したり、サンプリングのタイミングをオンラインで調整したりしなければ、所望の検出精度を得ることができなかった。
図1は本発明の実施の形態1におけるレゾルバによる角度検出方法を説明するための構成図である。図1において、マイクロコンピュータ1は矩形波電圧出力部2を具備する。矩形波電圧出力部2が出力する矩形波電圧は、アナログローパスフィルタ3によって矩形波から正弦波状の信号に変換され、レゾルバ4に励磁信号として出力される。
矩形波電圧出力部2が出力する矩形波電圧の周波数は、本実施の形態1では10kHzとする
が、これ以外の周波数であっても良い。
レゾルバ4は1相励磁2相出力のレゾルバであり、励磁信号が入力されるとともに第1の信号(cos信号)及び第2の信号(sin信号)の2相を出力する。
レゾルバ4が出力する第1の信号及び第2の信号の周波数は、レゾルバ4に入力された励磁信号と同じ周波数である。
マルチプレクサ5が選択した信号はAD変換器6へ出力される。AD変換器6はマルチプレクサ5から得たアナログ信号をアナログ/デジタル変換し、デジタル信号を演算部7へ出力する。演算部7は、マルチプレクサ5が選択すべき信号をマルチプレクサ5へ出力するとともに、AD変換器6が信号を検出すべきタイミングに検出トリガ信号をAD変換器6へ出力する。
図2は実施の形態1の動作を示す図であり、回転角度は45度となっている。
また、横軸は時刻、縦軸は各信号の振幅である。図2の上段は励磁信号、中段は第1の信号、下段は第2の信号の波形である。
本実施の形態1では、図2に示すように、「第1の所定時間(ΔT)」+「第2の所定時間
」=「励磁信号2周期(2T)」の関係を保ち、第1の信号検出過程と第2の信号検出過程をそれぞれ励磁信号に同期させている。
図2において、時刻t1で第1の信号を検出し、時刻t1から第1の所定時間が経過した時刻t2で第2の信号を検出する。この励磁信号に同期し、時刻t1にて第1の信号を検出し
、第1の所定時間後となる時刻t2に第2の信号を検出する検出過程を第1の信号検出過程と定義する。
時刻t2から第2の所定時間後の時刻t3で第2の信号を検出し、時刻t3から第1の所定時間後となる時刻t4に第1の信号を検出する。この第1の信号検出過程から第2の所定時間後となる時刻t3に、第2の信号を検出し、さらに第1の所定時間後となる時刻t4に第1の信号を検出する過程を第2の信号検出過程と定義する。
おけるレゾルバが出力する第1の信号と第2の信号は、夫々以下のy1(t), y2(t)と記述できる。

におけるTは100μsecになる。(3)式は、時刻tにおけるf(t)は1/2周期前のf(t-T/2)と振幅が同じで符号が異なっていることを意味する。換言すると、T/2周期毎に反転した同一形状の波形であると言っても良い。励磁信号が正弦波状であればf(t)は周波数10kHzの
三角関数なので(3)式が成り立つが、励磁信号に歪があったとしても、時刻tにおけるf(t)は、1/2周期前のf(t-T/2)と振幅が同じで符号が異なっていれば成立する。
時刻t1における第1の信号y1(t1)は(5)式、時刻t4における第1の信号y1(t4)は(6
)式となる。
t4=t1+2T+ΔT1 ・・・・・(8)
上記(4)式と(8)式の関係から(9)式を得る。
t3=t2+2T-ΔT1 ・・・・・・・・(14)
上記(4)式と(14)式の関係から(15)式を得る。
磁信号2周期(2T)」の関係が成り立っているので、t1とt3の間には(17)式の関係が成立する。
t3-t1=2T ・・・・・・(17)
前記(3)式と(17)式の関係から(16)式は(18)式に置き換えてよい。
得ることができる。
このような検出方法とすることで第1の信号検出過程と第2の信号検出過程に時間差を確保することが可能であり、励磁信号に同期して第1の信号と第2の信号を同時に検出する必要がなく、複数信号を同時検出できる機能を有するマイクロコンピュータや、サンプルホールド回路等のハードウェアを用いることなく、正確な回転角度を得ることができるといった効果を得る。
若しくは第2の信号を検出しており、第1の信号と第2の信号を同時に検出していないにも関わらず、回転位置を得ることができる。
従来のレゾルバによる角度検出方法は、それぞれ連続して行った2度のサンプリングのタイミングがピークを挟んで、それぞれピークから等しい時間だけずれるようにしなければ、角度検出の精度が低下してしまう問題があった。本実施の形態1に記載のレゾルバによる角度検出方法では、(20)式を見て判るように、2度のサンプリングのタイミングがピークを挟んで、それぞれピークから等しい時間だけずれるようにしていなくても良く、レゾルバの2相信号の振幅ピーク発生時刻と励磁信号のピーク発生時刻の時間差が、製造ばらつきなどによって個々に異なったり、レゾルバの温度変化によって変化しても、固体毎に微調整したり、サンプリングのタイミングをオンラインで調整する必要がなく、所望の検出精度を得ることができるといった効果を得る。
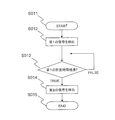
ステップS002で第1の信号検出過程を実行する。この第1の検出過程では、前記y1(t1), y2(t2)の値を取得する。ステップS003では第1の信号検出過程(ステップS002)の実行完了から第2の所定時間が経過したか否かを確認し、第2の所定時間が経過していなければS003でFALSE、第2の所定時間が経過していればS003でTRUEの処理を施す。
図3のフローチャートに従った処理によりレゾルバの回転角度を逐次検出することができる。
ステップS013では第1の信号を検出(ステップS012)完了から第1の所定時間ΔTが経過し
たか否かを確認し、第1の所定時間が経過していなければS013でFALSE、第1の所定時間
が経過していればS013でTRUEの処理を施す。
ステップS014では第2の信号を検出する。このときの時刻はt2であり、検出した第2の信号はy2(t2)として記憶しておく。ステップS015で第1の信号検出過程を完了する。
ステップS023では第2の信号を検出(ステップS022)完了から第1の所定時間ΔTが経過し
たか否かを確認し、第1の所定時間が経過していなければS023でFALSE、第1の所定時間
が経過していればS023でTRUEの処理を施す。
ステップS024では第1の信号を検出する。このときの時刻はt4であり、検出した第1の信号はy1(t4)として記憶しておく。ステップS025で第2の信号検出過程を完了する。
励磁2相出力のレゾルバ4から得られる2相の正弦波変調信号である第1の信号及び第2の信号を、同期検波して角度を検出する方法であって、励磁信号に同期して第1の信号を検出し、第1の所定時間後に第2の信号を検出する第1の信号検出過程と、第1の信号検出過程から第2の所定時間後に、第2の信号を検出し、さらに第1の所定時間後に第1の信号を検出する第2の信号検出過程と、を含むようにしたので、2相出力の第1の信号と第2の信号を同時に検出することなく、第1の信号と第2の信号の振幅比を正確に検出できる。その上、図2及び(20)式から判るように、それぞれ連続して行った2度のサンプリングのタイミングがピークを挟んで、それぞれピークから等しい時間だけずれるようにしてなくても、精度良く角度検出が可能である。従って、レゾルバの2相信号の振幅ピーク発生時刻と励磁信号との位相差が、製造ばらつきなどによって個々に異なったり、レゾルバの温度変化によって変化しても、所望の検出精度を保つ効果が得られる。
程に時間差を確保することが可能であり、励磁信号に同期して第1の信号と第2の信号を同時に検出する必要がなく、複数信号を同時検出できる機能を有するマイクロコンピュータや、サンプルホールド回路等のハードウェアを用いることなく、正確な回転角度を得ることができるといった効果が得られる。
実施の形態1では、第1の所定時間は励磁信号の半周期より大きかったが、実施の形態2では、第1の所定時間を励磁信号の半周期以内にするようにしたものである。
図6は実施の形態2の動作を示す図であり、回転角度は実施の形態1の図2と同様に45度となっている。また、横軸は時刻、縦軸は各信号の振幅である。
図6の上段は励磁信号、中段は第1の信号、下段は第2の信号の波形である。
本実施の形態2では、図6に示すように、「第1の所定時間(ΔT)」+「第2の所定時間
」=「励磁信号1.5周期(1.5T)」の関係を保ち、第1の信号検出過程と第2の信号検出過
程をそれぞれ励磁信号に同期させている。
本実施の形態2においても、時刻tにおけるレゾルバが出力する第1の信号と第2の信
号は、前記(1)、(2)、(3)、(4)式の関係が成立している。
t4=t1+1.5T+ΔT1 ・・・・・・(24)
上記(4)式と(24)式の関係から(25)式を得る。
t3=t2+1.5T-ΔT1 ・・・・・・(30)
上記(4)式と(30)式の関係から(31)式を得る。
磁信号1.5周期(1.5T)」の関係が成り立っているので、t1とt3の間には(33)式の関係
が成立する。
t3-t1=1.5T ・・・・・・(33)
前記(4)式と(33)式の関係から(32)式は(34)式に置き換えてよい。
度θを得ることができる。
これについては時刻t3における第2の信号y2(t3)、時刻t4における第1の信号y1(t4)についても同様である。そこで、本実施の形態2では、第1の所定時間は前記励磁信号の半周期以内とすることにより、時刻t1とt2の間隔、及び時刻t3とt4の間隔を充分短くするようにしたので、前記実施の形態1の効果に加えて、回転角度が変化する場合でも正確に回転角度が検出できるといった効果を得る。
しかしながら、検出した第1の信号及び第2の信号の振幅が小さいことは自明であり、信号とノイズの比(S/N比)が小さくなり、ノイズの影響を受けやすくなってしまう。
このS/N比を大きくするには、第1の信号検出過程及び第2の信号検出過程を第1の信号及び第2の信号のピーク近傍で行うようにすれば良く、これによりS/N比を高めてノイズに対する誤差を更に抑制するといった効果を得ることができる。
前記実施の形態2におけるレゾルバによる角度検出方法では、第1の信号検出過程は、第1の信号を検出してから該第1の信号及び第2の信号がピークに到達する前に第2の信号を検出すると共に、第2の信号検出過程は、前記第2の信号を検出してから前記第1の信号及び第2の信号がピークに到達する前に前記第1の信号を検出するようにしていた。
これに対し、本実施の形態3におけるレゾルバによる角度検出方法は、第1の信号検出過程は、第1の信号を検出してから該第1の信号及び第2の信号のピークを挟んで前記第2の信号を検出するとともに、前記第2の信号検出過程は、前記第2の信号を検出してから前記第1の信号及び第2の信号のピークを挟んで前記第1の信号を検出するようにしたものである。
図7の上段は励磁信号、中段は第1の信号、下段は第2の信号の波形である。
本実施の形態3では、図7に示すように、「第1の所定時間(ΔT)」+「第2の所定時間
」=「励磁信号0.5周期(0.5T)」の関係を保ち、第1の信号検出過程と第2の信号検出過
程をそれぞれ励磁信号に同期させている。
本実施の形態3においても、時刻tにおけるレゾルバが出力する第1の信号と第2の信
号は前記(1)、(2)、(3)、(4)式の関係が成立している。
t4=t1+0.5T+ΔT1 ・・・・・・(40)
上記(4)式と(40)式の関係から(41)式を得る。
t3=t2+0.5T-ΔT1 ・・・・・・(46)
前記(4)式と(46)式の関係から(47)式を得る。
磁信号0.5周期(0.5T)」の関係が成り立っているので、t1とt3の間には(49)式の関係
が成立する。
t3-t1=0.5T ・・・・・・(49)
前記(4)式と(49)式の関係から(48)式は(50)式に置き換えてよい。
度θを得ることができる。
従って、 本実施の形態3におけるレゾルバによる角度検出方法の処理ステップを示すフローチャートは、図3、図4と同様であり、第1の所定時間及び第2の所定時間の値が異なる点以外は前記実施の形態2と同様となる。
図8は、本実施の形態3において、第一の所定時間ΔTと励磁信号周期Tの比「ΔT÷T」と、第1の信号及び第2の信号の振幅の関係についてプロットしたものである。
SN比を勘案すれば、検出する第1の信号及び第2の信号の振幅は大きいほど良い。
振幅低下が5%以下であれば、工学的な影響は充分小さいと見なして良い。
図8の関係から「ΔT÷T≦0.1」であれば振幅低下が5%以下にすることが可能であり、
第1の所定時間(ΔT)は、励磁信号周期Tの1/10倍以下、即ちΔT≦0.1Tにすると良いこと
が判る。
4 レゾルバ、5 マルチプレクサ、6 AD変換器、7 演算部。
Claims (7)
- 1相励磁2相出力のレゾルバから得られる2相の正弦波変調信号である第1の信号及び第2の信号を同期検波し、前記第1の信号と前記第2の信号の振幅比に基づいて回転体の回転角度を検出する方法であって、
時刻t1で前記第1の信号y1(t1)を検出し、時刻t1から第1の所定時間ΔTが経過した時刻t2で、前記第2の信号y2(t2)の順に信号を検出する第1の信号検出過程と、
時刻t2から第2の所定時間後の時刻t3で前記第2の信号y2(t3)を検出し、時刻t3から前記第1の所定時間ΔTが経過した時刻t4で、前記第1の信号y1(t4)の順に信号を検出する第2の信号検出過程と、を含み、{y1(t1)−y1(t4)}と{y2(t2)−y2(t3)}の比を前記第1の信号と前記第2の信号の振幅比として検出し、該振幅比に基づいて回転体の角度を検出することを特徴とするレゾルバによる角度検出方法。 - 前記第1の信号検出過程と、前記第2の信号検出過程は、前第1の信号及び第2の信号のゼロクロス点を挟んで行うことを特徴とする請求項1に記載のレゾルバによる角度検出方法。
- 前記第1の信号検出過程は、レゾルバの励磁信号の半周期以内に実行とすることを特徴とする請求項1または請求項2に記載のレゾルバの角度検出方法。
- 前記第1の信号検出過程及び前記第2の信号検出過程は、前記第1の信号及び第2の信号のゼロクロス点付近を除いて行うことを特徴とする請求項1〜請求項3のいずれか1項に記載のレゾルバによる角度検出方法。
- 前記第1の信号検出過程及び前記第2の信号検出過程は、前記励磁信号のピーク近傍で行うことを特徴とする請求項1〜請求項4のいずれか1項に記載のレゾルバによる角度検出方法。
- 前記第1の信号検出過程は、前記第1の信号を検出してから前記第1の信号及び第2の信号のピークを挟んで前記第2の信号を検出するとともに、
前記第2の信号検出過程は、前記第2の信号を検出してから前記第1の信号及び第2の信号のピークを挟んで前記第1の信号を検出することを特徴とする請求項1〜請求項5のいずれか1項に記載のレゾルバによる角度検出方法。 - 前記第1の信号検出過程を実行してから前記励磁信号の半周期以内に前記第2の信号検出過程を実行することを特徴とする請求項1〜請求項6のいずれか1項に記載のレゾルバによる角度検出方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011156428A JP5281126B2 (ja) | 2011-07-15 | 2011-07-15 | レゾルバによる角度検出方法 |
| EP12153802.9A EP2546610B1 (en) | 2011-07-15 | 2012-02-03 | Angle detection method with resolver |
| US13/372,108 US9016123B2 (en) | 2011-07-15 | 2012-02-13 | Angle detection method with resolver |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011156428A JP5281126B2 (ja) | 2011-07-15 | 2011-07-15 | レゾルバによる角度検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013024577A JP2013024577A (ja) | 2013-02-04 |
| JP5281126B2 true JP5281126B2 (ja) | 2013-09-04 |
Family
ID=45606974
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011156428A Expired - Fee Related JP5281126B2 (ja) | 2011-07-15 | 2011-07-15 | レゾルバによる角度検出方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US9016123B2 (ja) |
| EP (1) | EP2546610B1 (ja) |
| JP (1) | JP5281126B2 (ja) |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6527704B2 (ja) * | 2015-01-29 | 2019-06-05 | ルネサスエレクトロニクス株式会社 | 半導体装置 |
| CN107276323B (zh) * | 2017-08-01 | 2024-04-19 | 苏州昱泽智能科技有限公司 | 一种角度检测设备、旋转体及电动机系统 |
| JP7251751B2 (ja) * | 2017-11-07 | 2023-04-04 | 株式会社松尾製作所 | 電気角取得システム、電気角取得方法、電気角取得プログラム、電気角取得特性測定システム、電気角取得特性測定方法および電気角取得特性測定プログラム |
| CN108204830B (zh) * | 2017-11-28 | 2019-08-06 | 珠海格力电器股份有限公司 | 相位偏差的补偿方法和装置 |
| KR102051820B1 (ko) | 2018-07-17 | 2019-12-04 | 국방과학연구소 | 비동기 리졸버 회전각 검출기 및 이의 방법 |
| JP7186846B1 (ja) * | 2021-10-27 | 2022-12-09 | 三菱電機株式会社 | 角度検出装置及び交流回転機の制御システム |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3182493B2 (ja) * | 1994-12-27 | 2001-07-03 | 多摩川精機株式会社 | バリアブルリラクタンス型角度検出器 |
| US6304832B1 (en) * | 1999-03-16 | 2001-10-16 | Mitutoyo Corporation | Symmetric sampling |
| JP3574356B2 (ja) * | 1999-07-19 | 2004-10-06 | オークマ株式会社 | 位置検出装置 |
| JP2004061157A (ja) | 2002-07-25 | 2004-02-26 | Toyota Motor Corp | レゾルバの信号処理装置及び信号処理方法 |
| JP3794690B2 (ja) * | 2003-03-31 | 2006-07-05 | 川崎重工業株式会社 | レゾルバデジタル変換装置およびレゾルバデジタル変換方法 |
| JP4515120B2 (ja) * | 2004-03-12 | 2010-07-28 | ルネサスエレクトロニクス株式会社 | レゾルバディジタル角度変換装置および方法ならびにプログラム |
| JP5082642B2 (ja) * | 2007-07-18 | 2012-11-28 | パナソニック株式会社 | レゾルバ/デジタル変換方法およびレゾルバ/デジタル変換回路 |
| JP4422757B2 (ja) * | 2007-12-25 | 2010-02-24 | 日本航空電子工業株式会社 | リファレンス信号生成回路、角度変換器及び角度検出装置 |
| JP4381450B2 (ja) * | 2008-01-11 | 2009-12-09 | 日本航空電子工業株式会社 | 同期クロック生成回路及び同期クロック生成回路を備えたアナログ/ディジタル角度変換器と角度検出装置 |
| JP4885245B2 (ja) * | 2009-01-15 | 2012-02-29 | 日本航空電子工業株式会社 | Rdコンバータ及び角度検出装置 |
| JP5173962B2 (ja) * | 2009-08-06 | 2013-04-03 | 三菱電機株式会社 | レゾルバ/デジタル変換装置およびレゾルバ/デジタル変換方法 |
-
2011
- 2011-07-15 JP JP2011156428A patent/JP5281126B2/ja not_active Expired - Fee Related
-
2012
- 2012-02-03 EP EP12153802.9A patent/EP2546610B1/en active Active
- 2012-02-13 US US13/372,108 patent/US9016123B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP2546610A2 (en) | 2013-01-16 |
| US9016123B2 (en) | 2015-04-28 |
| EP2546610B1 (en) | 2020-09-02 |
| EP2546610A3 (en) | 2017-08-30 |
| US20130014583A1 (en) | 2013-01-17 |
| JP2013024577A (ja) | 2013-02-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5281126B2 (ja) | レゾルバによる角度検出方法 | |
| JP5802588B2 (ja) | 角度検出装置およびモータ駆動制御装置 | |
| JP5173962B2 (ja) | レゾルバ/デジタル変換装置およびレゾルバ/デジタル変換方法 | |
| WO2016139849A1 (ja) | レゾルバ装置 | |
| US9068861B2 (en) | Resolver interface | |
| CN111464107B (zh) | 电机、电机数据解析方法、装置及系统 | |
| KR101834526B1 (ko) | 마그네틱 엔코더의 출력 신호를 보상하는 장치 | |
| JP2017151032A (ja) | 信号処理器及び制御装置 | |
| JP2014157069A (ja) | 位置検出装置 | |
| US10989568B2 (en) | Position detection device and position detection method | |
| JP5733250B2 (ja) | 位置検出装置 | |
| JP2014238331A (ja) | 角度検出装置および角度検出方法 | |
| JP2013224865A (ja) | 信号処理装置 | |
| JP5895680B2 (ja) | 信号処理装置 | |
| JP5821764B2 (ja) | 位置検出装置 | |
| JP6583738B2 (ja) | 位相計測装置およびこの位相計測装置を適用した機器 | |
| CN110869710B (zh) | 使用感应式位移传感器的测量方法 | |
| CN102692540A (zh) | 一种频率跟踪交流采样方法 | |
| JP5361658B2 (ja) | レゾルバデジタルコンバータ | |
| JP2008196888A (ja) | 位相差検出装置及び回転位置検出装置 | |
| JP2016020819A (ja) | 角度検出装置及びモータ駆動回路 | |
| JP6430274B2 (ja) | 位相差検出方法 | |
| JP2003344106A (ja) | 回転角度検出装置 | |
| JP2013083500A (ja) | 角度検出装置 | |
| JP2020091229A (ja) | 回転角度検出装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121211 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130124 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130507 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130523 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5281126 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |