JP5231725B2 - X線診断装置及びその制御方法 - Google Patents
X線診断装置及びその制御方法 Download PDFInfo
- Publication number
- JP5231725B2 JP5231725B2 JP2006170576A JP2006170576A JP5231725B2 JP 5231725 B2 JP5231725 B2 JP 5231725B2 JP 2006170576 A JP2006170576 A JP 2006170576A JP 2006170576 A JP2006170576 A JP 2006170576A JP 5231725 B2 JP5231725 B2 JP 5231725B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- ray
- fluoroscopic image
- irradiation field
- imaging
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims description 25
- 238000003384 imaging method Methods 0.000 claims description 160
- 238000001514 detection method Methods 0.000 claims description 99
- 238000004364 calculation method Methods 0.000 claims description 25
- 210000003371 toe Anatomy 0.000 claims description 9
- 210000001015 abdomen Anatomy 0.000 claims description 8
- 230000008859 change Effects 0.000 claims description 8
- 230000004044 response Effects 0.000 claims description 4
- 238000002594 fluoroscopy Methods 0.000 claims description 2
- 239000002872 contrast media Substances 0.000 description 29
- 230000006870 function Effects 0.000 description 12
- 230000008569 process Effects 0.000 description 11
- 230000015572 biosynthetic process Effects 0.000 description 6
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 5
- 230000007246 mechanism Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 4
- 229910052721 tungsten Inorganic materials 0.000 description 4
- 239000010937 tungsten Substances 0.000 description 4
- 238000006243 chemical reaction Methods 0.000 description 3
- 210000002683 foot Anatomy 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 238000002601 radiography Methods 0.000 description 3
- 230000017531 blood circulation Effects 0.000 description 2
- 238000004590 computer program Methods 0.000 description 2
- 238000012790 confirmation Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 230000005855 radiation Effects 0.000 description 2
- ZOKXTWBITQBERF-UHFFFAOYSA-N Molybdenum Chemical compound [Mo] ZOKXTWBITQBERF-UHFFFAOYSA-N 0.000 description 1
- 230000009471 action Effects 0.000 description 1
- 210000004204 blood vessel Anatomy 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 238000004587 chromatography analysis Methods 0.000 description 1
- 238000003745 diagnosis Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 238000010253 intravenous injection Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 229910052750 molybdenum Inorganic materials 0.000 description 1
- 239000011733 molybdenum Substances 0.000 description 1
- 238000002360 preparation method Methods 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images













Description
図1は、この発明に係るX線診断装置の構成の一例を表している。同図に示すX線診断装置1は、図11、図12に示した従来の構成と同様に、寝台2、X線管球3、X線絞り4及びX線検出器5を備えている。また、このX線診断装置1には、従来と同様に、演算制御部11、X線制御部12、絞り制御部13、駆動制御部14、DR装置15及びユーザインターフェイス16が設けられている。なお、X線診断装置1は、たとえば図11と同様の外観構成を備えている。
この実施形態に係るX線診断装置1の使用形態について、図3〜図9を更に参照しながら説明する。図3に示すフローチャートは、X線診断装置1の使用形態の一例を表している。
最初に、被検体Pに造影剤を投与する(S1)。なお、造影剤を投与するタイミングは、造影剤を投与してから撮影対象部位に到達するまでの時間などを考慮して適宜に決定され、たとえば撮影画像取得段階の後に造影剤を投与するようにしてもよい。なお、造影剤の到達時間は、造影剤の静注位置と撮影対象部位との距離、造影剤の種類、被検体Pの血流速度などの各種の条件に基づくものである。
続いて、ユーザは、ユーザインターフェイス16を用いて、撮影画像の撮影範囲、すなわち撮影開始位置と撮影終了位置とをそれぞれ設定する(S7、S9)。このとき、X線診断装置1は、撮影開始位置、撮影終了位置を含む透視画像を取得するように動作する(S8、S10)。
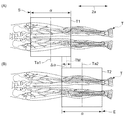
ユーザは、ユーザインターフェイス16を用いて移動部6を長手方向2aに移動させることで被検体Pの様々な透視画像(部分透視画像)を表示させて観察することにより、撮影開始位置として適当な被検体Pの位置(透視画像における位置)を特定する。そして、所定の操作を行うことにより、この特定位置を撮影開始位置として設定する。
次に、撮影終了位置の設定について、図4(B)を参照しつつ説明する。ユーザは、ユーザインターフェイス16を用いて移動部6を長手方向2aに移動させ、図4(B)に示す透視画像Tの部分透視画像T2を表示部17に表示させる。そして、所定の操作(たとえば「撮影終了位置設定スイッチ」の操作)を行うと、演算制御部11は、この部分透視画像T2の最も足先側の位置を示す情報を、撮影終了位置Eを示す情報(撮影終了位置情報;長手方向2aに定義された座標値)として求めて記憶する(S9)。
次に、演算制御部11は、ステップS8にて取得された部分透視画像T1と、ステップS10にて取得された部分透視画像T2とを貼り合わせて得られる透視画像を表示部17に表示させる(S11)。
続いて、ステップS7、S9で設定された撮影範囲(撮影開始位置Sから撮影終了位置Eまでの範囲)における長尺撮影を行うための各撮影画像の撮影領域(の撮影位置;特に、長手方向2aにおける位置)を設定し記憶する(S12)。ここで、撮影領域とは、長尺撮影において取得される複数の撮影画像のそれぞれの撮影範囲を意味する。
各撮影領域hiの撮影位置が決定されると、演算制御部11は、絞り制御部13を制御して、ステップS12で得られた各撮影領域hiの長さdに対応する照射野を形成するように、X線絞り4の絞り羽根41〜44を駆動させて開口を形成する(S13)。
以上のようなX線診断装置1の作用及び効果を説明する。このX線診断装置1は、従来と同様のハードウェア構成をそなえている。特に、寝台2、X線管球3、X線絞り4、X線検出器5、駆動制御部14、DR装置15、ユーザインターフェイス16等を備えている。演算制御部11は、所定の演算処理や装置各部の制御を行うことにより、次のような長尺撮影を実現する。
以上に詳述した構成は、この発明を好適に実施するための一具体例に過ぎないものである。したがって、この発明の要旨の範囲内における任意の変形を適宜に施すことが可能である。
2 寝台
3 X線管球
4 X線絞り
41、42、43、44 絞り羽根
5 X線検出器
6 移動部
11 演算制御部
12 X線制御部
13 絞り制御部
14 駆動制御部
15 DR(Digital Radiography)装置
16 ユーザインターフェイス
17 表示部
18 操作部
2a 長手方向(体軸方向)
2b 短手方向
P 被検体
T、T1、T2、U 透視画像
S 撮影開始位置
E 撮影終了位置
h1〜hN 撮影領域
H1〜HN 撮影画像
Claims (15)
- 寝台と、X線を発生するX線発生手段と、前記発生されたX線の照射野を形成する照射野形成手段と、前記寝台に載置された被検体を透過したX線を検出して検出データを出力するX線検出手段と、前記寝台と、前記X線発生手段、前記照射野形成手段及び前記X線検出手段とを、前記被検体の体軸方向に沿って相対的に移動させる駆動手段と、前記出力された検出データに基づいて前記被検体の内部形態を表す画像を形成する画像形成手段と、前記形成された画像を表示させる表示制御手段と、を有するX線診断装置であって、
前記照射野形成手段は、前記X線の第1の照射野と、当該第1の照射野よりも前記体軸方向の長さが短い第2の照射野とを切り換えて形成し、
前記駆動手段は、前記相対的な移動により、前記第2の照射野のX線が照射される前記被検体の部位を前記体軸方向に沿って変更し、
前記画像形成手段は、
前記第1の照射野のX線が照射されたときに前記出力された検出データに基づいて、前記被検体の所定部位の透視画像を形成するとともに、
前記透視画像に含まれる部分透視画像のうち、撮影開始に対応する部分透視画像の指定を受けて当該撮影開始に対応する部分透視画像に基づき特定された撮影開始位置から、撮影終了に対応する部分透視画像の指定を受けて当該撮影終了に対応する部分透視画像に基づき特定された撮影終了位置までの範囲で前記駆動手段により前記変更される前記被検体の部位のそれぞれについて、前記第2の照射野のX線が当該部位に照射されたときに前記出力された検出データに基づいて、当該部位の撮影画像を形成し、
前記表示制御手段は、撮影画像が取得される度毎に、各部位の撮影画像を順次貼り合わせて、透視画像に重ねて表示させる、
ことを特徴とするX線診断装置。 - 前記照射野形成手段は、前記第2の照射野として、前記体軸方向の長さが前記体軸方向に直交する方向の長さよりも短い略長方形状の照射野を形成し、
前記画像形成手段は、前記被検体の部位のそれぞれの撮影画像として、前記略長方形状の照射野に対応する略長方形状の撮影画像を形成する、
ことを特徴とする請求項1に記載のX線診断装置。 - 前記照射野形成手段により形成される照射野の前記体軸方向における長さと、前記所定部位の前記体軸方向における長さとに基づいて、前記撮影画像の撮影位置を求める演算手段を更に備え、
前記駆動手段は、前記求められた前記撮影位置に基づいて、前記第2の照射野のX線が照射される前記被検体の部位の前記変更を行う、
ことを特徴とする請求項1に記載のX線診断装置。 - 前記撮影画像の撮影枚数と、前記所定部位の前記体軸方向における長さとに基づいて、前記撮影画像の撮影位置を求める演算手段を更に備え、
前記駆動手段は、前記求められた前記撮影位置に基づいて、前記第2の照射野のX線が照射される前記被検体の部位の前記変更を行う、
ことを特徴とする請求項1に記載のX線診断装置。 - 前記演算手段は、隣接する撮影画像のそれぞれの一部が互いに重複するように、前記撮影画像の撮影位置を求める、
ことを特徴とする請求項3又は請求項4に記載のX線診断装置。 - 前記駆動手段は、前記相対的な移動により、前記第1の照射野のX線が照射される前記所定部位の部分領域を前記体軸方向に沿って変更し、
前記画像形成手段は、前記変更される前記部分領域のそれぞれについて、前記第1の照射野のX線が当該部分領域に照射されたときに前記出力された検出データに基づいて、当該部分領域の透視画像を形成し、
前記表示制御手段は、前記部分領域のそれぞれについて前記形成された透視画像を、前記部分領域の位置関係に基づいて表示させることにより、前記所定部位の透視画像の前記表示を行う、
ことを特徴とする請求項1に記載のX線診断装置。 - 操作手段を更に備え、
前記駆動手段は、前記操作手段が操作されたことに対応して、前記X線が照射される前記被検体の部位の前記変更を行う、
ことを特徴とする請求項1に記載のX線診断装置。 - 前記撮影開始位置は、前記撮影開始に対応する部分透視画像が取得された位置の位置情報と、当該部分透視画像を取得するときにX線が検出された領域とに基づき特定され、前記撮影終了位置は、前記撮影終了に対応する部分透視画像が取得された位置の位置情報と、当該部分透視画像を取得するときにX線が検出された領域とに基づき特定されることを特徴とする請求項1に記載のX線診断装置。
- 前記被検体の腹部付近から足先までの範囲における透視画像が形成された場合に、前記撮影開始に対応する部分透視画像における最も腹部側の位置が前記撮影開始位置として特定され、前記撮影終了に対応する部分透視画像における最も足先側の位置が前記撮影終了位置として特定されることを特徴とする請求項1に記載のX線診断装置。
- 寝台と、X線を発生するX線発生手段と、前記発生されたX線の照射野を形成する照射野形成手段と、前記寝台に載置された被検体を透過したX線を検出して検出データを出力するX線検出手段と、前記寝台と、前記X線発生手段、前記照射野形成手段及び前記X線検出手段とを、前記被検体の体軸方向に沿って相対的に移動させる駆動手段と、前記出力された検出データに基づいて前記被検体の内部形態を表す画像を形成する画像形成手段と、前記被検体の透視画像を取得するための透視画像取得動作と、前記被検体の撮影画像を取得するための撮影画像取得動作とを切り換えて動作制御を行う制御手段と、を有するX線診断装置であって、
前記制御手段は、
前記透視画像取得動作時に、前記照射野形成手段を制御して第1の照射野を形成させて、前記第1の照射野に対応する検出データを前記X線検出手段に出力させるとともに、当該検出データに基づいて前記画像形成手段により形成された透視画像を表示させ、
前記撮影画像取得動作時に、前記照射野形成手段を制御して前記第1の照射野よりも前記体軸方向の長さが短い第2の照射野を形成させ、前記透視画像に含まれる部分透視画像のうち、撮影開始に対応する部分透視画像の指定を受けて当該撮影開始に対応する部分透視画像に基づき特定された撮影開始位置から、撮影終了に対応する部分透視画像の指定を受けて当該撮影終了に対応する部分透視画像に基づき特定された撮影終了位置までの範囲で前記駆動手段を制御して前記第2の照射野のX線が照射される前記被検体の部位を変更させて、前記被検体の部位のそれぞれに対応する検出データを前記X線検出手段に出力させるとともに、前記被検体の部位のそれぞれに対応する検出データを基に前記画像形成手段により形成された撮影画像を、当該部位と前記透視画像との位置関係に基づいて、撮影画像が取得される度毎に、各部位の撮影画像を順次貼り合わせて、透視画像に重ねて表示させる、
ことを特徴とするX線診断装置。 - 前記撮影開始位置は、前記撮影開始に対応する部分透視画像が取得された位置の位置情報と、当該部分透視画像を取得するときにX線が検出された領域とに基づき特定され、前記撮影終了位置は、前記撮影終了に対応する部分透視画像が取得された位置の位置情報と、当該部分透視画像を取得するときにX線が検出された領域とに基づき特定されることを特徴とする請求項10に記載のX線診断装置。
- 前記被検体の腹部付近から足先までの範囲における透視画像が形成された場合に、前記撮影開始に対応する部分透視画像における最も腹部側の位置が前記撮影開始位置として特定され、前記撮影終了に対応する部分透視画像における最も足先側の位置が前記撮影終了位置として特定されることを特徴とする請求項10に記載のX線診断装置。
- 寝台と、X線を発生するX線発生手段と、前記発生されたX線の照射野を形成する照射野形成手段と、前記寝台に載置された被検体を透過したX線を検出して検出データを出力するX線検出手段と、前記寝台と、前記X線発生手段、前記照射野形成手段及び前記X線検出手段とを、前記被検体の体軸方向に沿って相対的に移動させる駆動手段と、前記出力された検出データに基づいて前記被検体の内部形態を表す画像を形成する画像形成手段と、を有し、前記被検体の透視画像を取得するための透視画像取得動作と、前記被検体の撮影画像を取得するための撮影画像取得動作とを実行するX線診断装置の制御方法であって、
前記透視画像取得動作時には、
前記照射野形成手段に第1の照射野を形成させるステップと、
前記第1の照射野に対応する検出データを前記X線検出手段に出力させるステップと、
当該検出データに基づいて前記画像形成手段に透視画像を形成させるステップと、
当該形成された透視画像を表示させるステップと、
前記透視画像に含まれる部分透視画像のうち、撮影開始に対応する部分透視画像の指定を受けて、当該撮影開始に対応する部分透視画像に基づき撮影開始位置を特定するステップと、
撮影終了に対応する部分透視画像の指定を受けて、当該撮影終了に対応する部分透視画像に基づき撮影終了位置を特定するステップと、
を実行させ、
前記撮影画像取得動作時には、
前記第1の照射野よりも前記体軸方向の長さが短い第2の照射野を前記照射野形成手段に形成させるステップと、
前記撮影開始位置から前記撮影終了位置までの範囲で当該第2の照射野のX線が照射される前記被検体の部位を前記駆動手段に変更させるステップと、
前記被検体の部位のそれぞれに対応する検出データを前記X線検出手段に出力させるステップと、
前記被検体の部位のそれぞれに対応する検出データに基づく撮影画像を前記画像形成手段に形成させるステップと、
撮影画像が取得される度毎に、各部位の撮影画像を順次貼り合わせて、透視画像に重ねて表示させるステップと、
を実行させる、
ことを特徴とするX線診断装置の制御方法。 - 前記撮影開始位置は、前記撮影開始に対応する部分透視画像が取得された位置の位置情報と、当該部分透視画像を取得するときにX線が検出された領域とに基づき特定され、前記撮影終了位置は、前記撮影終了に対応する部分透視画像が取得された位置の位置情報と、当該部分透視画像を取得するときにX線が検出された領域とに基づき特定されることを特徴とする請求項13に記載のX線診断装置の制御方法。
- 前記被検体の腹部付近から足先までの範囲における透視画像が形成された場合に、前記撮影開始に対応する部分透視画像における最も腹部側の位置が前記撮影開始位置として特定され、前記撮影終了に対応する部分透視画像における最も足先側の位置が前記撮影終了位置として特定されることを特徴とする請求項13に記載のX線診断装置の制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006170576A JP5231725B2 (ja) | 2006-06-20 | 2006-06-20 | X線診断装置及びその制御方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006170576A JP5231725B2 (ja) | 2006-06-20 | 2006-06-20 | X線診断装置及びその制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008000220A JP2008000220A (ja) | 2008-01-10 |
| JP2008000220A5 JP2008000220A5 (ja) | 2009-08-06 |
| JP5231725B2 true JP5231725B2 (ja) | 2013-07-10 |
Family
ID=39005087
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006170576A Active JP5231725B2 (ja) | 2006-06-20 | 2006-06-20 | X線診断装置及びその制御方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5231725B2 (ja) |
Families Citing this family (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009165705A (ja) * | 2008-01-17 | 2009-07-30 | Shimadzu Corp | 放射線撮像装置 |
| JP5052384B2 (ja) * | 2008-03-28 | 2012-10-17 | 富士フイルム株式会社 | 放射線画像撮影装置 |
| US8837671B2 (en) | 2008-10-30 | 2014-09-16 | Shimadzu Corporation | Radiographic apparatus |
| JP5314437B2 (ja) * | 2009-01-16 | 2013-10-16 | 株式会社日立メディコ | X線装置 |
| JP5574078B2 (ja) * | 2009-03-27 | 2014-08-20 | 株式会社島津製作所 | X線撮影装置 |
| JP5279672B2 (ja) * | 2009-09-28 | 2013-09-04 | 富士フイルム株式会社 | 放射線撮影システム及びその撮影制御方法 |
| US8526700B2 (en) * | 2010-10-06 | 2013-09-03 | Robert E. Isaacs | Imaging system and method for surgical and interventional medical procedures |
| US11231787B2 (en) | 2010-10-06 | 2022-01-25 | Nuvasive, Inc. | Imaging system and method for use in surgical and interventional medical procedures |
| CN103957798B (zh) | 2011-11-30 | 2016-05-04 | 富士胶片株式会社 | 放射线拍摄系统 |
| JP5601343B2 (ja) * | 2012-05-02 | 2014-10-08 | 株式会社島津製作所 | 放射線撮像装置 |
| JP2014068978A (ja) * | 2012-10-01 | 2014-04-21 | Toshiba Corp | X線診断装置及びx線診断装置の制御方法 |
| WO2014054417A1 (ja) * | 2012-10-02 | 2014-04-10 | 株式会社島津製作所 | X線撮影装置 |
| JP6147616B2 (ja) * | 2013-09-06 | 2017-06-14 | 東芝メディカルシステムズ株式会社 | X線診断装置、および長尺撮影用検出器移動装置 |
| JP6127936B2 (ja) * | 2013-11-27 | 2017-05-17 | 株式会社島津製作所 | X線撮影装置 |
| WO2016016979A1 (ja) * | 2014-07-30 | 2016-02-04 | 株式会社島津製作所 | X線透視撮影装置 |
| JP6591148B2 (ja) * | 2014-08-25 | 2019-10-16 | キヤノンメディカルシステムズ株式会社 | X線診断装置 |
| CN108697395A (zh) * | 2015-12-18 | 2018-10-23 | 株式会社岛津制作所 | X射线摄影装置 |
| US10888294B2 (en) | 2018-12-27 | 2021-01-12 | Medtronic Navigation, Inc. | System and method for imaging a subject |
| US10881371B2 (en) | 2018-12-27 | 2021-01-05 | Medtronic Navigation, Inc. | System and method for imaging a subject |
| US11071507B2 (en) | 2018-12-27 | 2021-07-27 | Medtronic Navigation, Inc. | System and method for imaging a subject |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003116845A (ja) * | 2001-08-08 | 2003-04-22 | Hitachi Medical Corp | 医療用x線装置 |
| JP4230731B2 (ja) * | 2002-07-29 | 2009-02-25 | 株式会社東芝 | ディジタル画像処理装置及びx線診断装置 |
| JP4495958B2 (ja) * | 2002-12-17 | 2010-07-07 | 株式会社東芝 | X線診断装置及びx線撮影方法 |
| JP4174628B2 (ja) * | 2003-02-07 | 2008-11-05 | 株式会社島津製作所 | X線撮影装置 |
| US6895076B2 (en) * | 2003-06-03 | 2005-05-17 | Ge Medical Systems Global Technology Company, Llc | Methods and apparatus for multiple image acquisition on a digital detector |
| JP4812053B2 (ja) * | 2004-07-13 | 2011-11-09 | 株式会社日立メディコ | X線画像診断装置 |
-
2006
- 2006-06-20 JP JP2006170576A patent/JP5231725B2/ja active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP2008000220A (ja) | 2008-01-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5231725B2 (ja) | X線診断装置及びその制御方法 | |
| JP5460106B2 (ja) | X線撮影装置及びその制御方法、コンピュータプログラム | |
| JP6636923B2 (ja) | X線画像装置 | |
| JP4901159B2 (ja) | X線ct装置及びx線撮影方法 | |
| JP5948275B2 (ja) | 放射線撮影装置及び放射線撮影方法、並びに放射線撮影制御プログラム | |
| WO2014054442A1 (ja) | X線診断装置及びx線診断装置の制御方法 | |
| JP7130427B2 (ja) | X線診断装置およびx線診断方法 | |
| US9619906B2 (en) | X-ray imaging apparatus and control method for the same | |
| JP5550209B2 (ja) | X線撮影装置 | |
| WO2016046895A1 (ja) | X線透視撮影装置 | |
| JP2011067509A (ja) | 放射線撮影システム及びその撮影制御方法 | |
| US10111628B2 (en) | X-ray imaging apparatus and method for marking a location of a surgical tool on a displayed image | |
| JP2010178909A (ja) | X線コンピュータ断層撮影装置および撮影制御プログラム | |
| JP2010187812A (ja) | 医用寝台装置 | |
| JP2010273931A (ja) | X線撮影装置 | |
| JP7341950B2 (ja) | 画像処理装置、放射線画像撮影システム、画像処理方法、及び画像処理プログラム | |
| JP2015195832A (ja) | 制御装置、制御方法及びプログラム | |
| WO2007007473A1 (ja) | デジタル放射線画像撮影システム | |
| US11324461B2 (en) | X-ray imaging apparatus | |
| JP5836079B2 (ja) | 医用画像診断装置 | |
| JP7392478B2 (ja) | 拡大倍率算出装置、長尺撮影システム、プログラム及び拡大倍率算出方法 | |
| JP2012070840A (ja) | 放射線撮影装置、方法およびプログラム | |
| JP7115584B2 (ja) | 動態品質管理装置、動態品質管理プログラム及び動態品質管理方法 | |
| JP5995743B2 (ja) | 画像生成装置、画像生成方法及びプログラム | |
| JP6804491B2 (ja) | X線診断装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20090213 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090622 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090622 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110518 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110524 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110722 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111129 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20121016 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130116 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20130123 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130226 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130322 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160329 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5231725 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |