JP5201545B2 - エレベータのドア制御装置 - Google Patents
エレベータのドア制御装置 Download PDFInfo
- Publication number
- JP5201545B2 JP5201545B2 JP2007176498A JP2007176498A JP5201545B2 JP 5201545 B2 JP5201545 B2 JP 5201545B2 JP 2007176498 A JP2007176498 A JP 2007176498A JP 2007176498 A JP2007176498 A JP 2007176498A JP 5201545 B2 JP5201545 B2 JP 5201545B2
- Authority
- JP
- Japan
- Prior art keywords
- door
- current phase
- torque command
- value
- torque
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









Landscapes
- Elevator Door Apparatuses (AREA)
Description
図1は本発明の第1の実施形態に係るエレベータのドア制御装置の構成を示すブロック図である。なお、図中の1は減算器、2は減算器、3は加算器を示している。
通常は、保持用のトルク指令値Trefとして、一定のトルクT0が用いられている。このため、悪戯や地震等の大きな揺れによってトルクT0以上の大きな力が戸開方向に加わると、かごドア10が開いてしまう可能性がある。
図4は第1の実施形態における電流位相θと保持トルク指令値Trefとの関係を示す図である。
次に、本発明の第2の実施形態について説明する。
図6は第2の実施形態における電流位相θと保持トルク指令値Trefとの関係を示す図である。
次に、本発明の第3の実施形態について説明する。
図8および図9は第3の実施形態における電流位相θと基準値θrefとの関係を示す図である。図8は基準値θrefを上げた状態、図9は基準値θrefを下げた状態を示している。
次に、本発明の第4の実施形態について説明する。
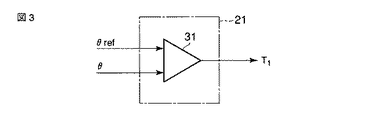
上記(1)式において、T1は増加トルク値、Irefは電流指令値である。
図11は異常発熱保護部37の動作を説明するための図である。悪戯等によりかごドア10の戸閉作が繰り返された場合、あるいは、電流位相基準値θrefが適正値に設定されず、保持トルク指令Trefが過剰に増加されるなどした場合、電力変換器18には通常よりも過大な電流が流れるため、温度が異常に上昇して内部の半導体素子等が破損する可能性がある。これを回避するため、二乗積分部36と異常発熱保護部37が設けられる。
上記(2)式において、J1は算出開始時の値、T1は増加トルクの値である。
Claims (3)
- かごドアを開閉動作させるためのドア駆動用モータと、
このドア駆動用モータの電流位相を検出する電流位相検出手段と、
上記かごドアが定位置で保持されている状態で、上記電流位相検出手段によって検出された電流位相と予め設定された基準値とを比較し、上記電流位相が上記基準値を超えた場合に上記かごドアが変位したものとみなして、上記ドア駆動用モータに対するトルク指令を通常時よりも増加させるトルク指令変更手段と、
エレベータの走行中における上記電流位相の変化に基づいて上記基準値を最適な値に設定する電流位相基準変更手段と
を具備したことを特徴とするエレベータのドア制御装置。 - 上記トルク指令変更手段は、上記電流位相と上記基準値との偏差量に応じて、上記ドア駆動用モータに対するトルク指令の増加量を制御することを特徴とする請求項1記載のエレベータのドア制御装置。
- 上記ドア駆動用モータに電力を供給する電力変換器の温度上昇を推定し、所定の値に達した場合に上記トルク指令変更手段によるトルク指令の増加動作を一時的に停止させる異常発熱保護手段をさらに具備したことを特徴とする請求項1記載のエレベータのドア制御装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007176498A JP5201545B2 (ja) | 2007-07-04 | 2007-07-04 | エレベータのドア制御装置 |
| CN200810128257XA CN101337637B (zh) | 2007-07-04 | 2008-07-04 | 电梯的门控制装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007176498A JP5201545B2 (ja) | 2007-07-04 | 2007-07-04 | エレベータのドア制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009012928A JP2009012928A (ja) | 2009-01-22 |
| JP5201545B2 true JP5201545B2 (ja) | 2013-06-05 |
Family
ID=40211832
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007176498A Active JP5201545B2 (ja) | 2007-07-04 | 2007-07-04 | エレベータのドア制御装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP5201545B2 (ja) |
| CN (1) | CN101337637B (ja) |
Families Citing this family (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4834747B2 (ja) * | 2009-03-03 | 2011-12-14 | 株式会社日立製作所 | エレベータのドア制御装置 |
| JP2011063404A (ja) * | 2009-09-18 | 2011-03-31 | Toshiba Elevator Co Ltd | エレベータのドア制御装置 |
| CN102070064A (zh) * | 2009-11-20 | 2011-05-25 | 苏州默纳克控制技术有限公司 | 电梯门机控制系统及方法 |
| JP2012056704A (ja) * | 2010-09-08 | 2012-03-22 | Toshiba Elevator Co Ltd | エレベータ装置 |
| CN102431870B (zh) * | 2011-09-16 | 2013-12-25 | 深圳市海浦蒙特科技有限公司 | 电梯门机开门关门到位转矩自适应方法和装置及控制系统 |
| JP5511029B2 (ja) * | 2012-03-30 | 2014-06-04 | 東芝エレベータ株式会社 | エレベータのドア制御装置 |
| JP5714655B2 (ja) * | 2013-06-21 | 2015-05-07 | 東芝エレベータ株式会社 | エレベータ制御装置 |
| CN106573759B (zh) * | 2014-08-25 | 2019-01-29 | 三菱电机株式会社 | 电梯门开闭装置及电梯门开闭装置的改装方法 |
| JP6927049B2 (ja) * | 2016-07-05 | 2021-08-25 | ソニーグループ株式会社 | モータ及びモータの製造方法 |
| JP6835256B2 (ja) * | 2017-12-08 | 2021-02-24 | 三菱電機株式会社 | エレベータの制御装置 |
| EP3853164B1 (de) * | 2018-09-21 | 2023-12-20 | Inventio Ag | Aufzugskabine, aufzugsanlage und verfahren zum betreiben einer aufzugsanlage |
| JP7537645B2 (ja) | 2022-03-29 | 2024-08-21 | 三菱電機株式会社 | エレベータードアの制御装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1006543B (zh) * | 1985-04-01 | 1990-01-24 | 三菱电机株式会社 | 升降机速度控制装置 |
| JPS62201784A (ja) * | 1986-02-28 | 1987-09-05 | 株式会社日立製作所 | エレベ−タの戸の制御装置 |
| JPH07106859B2 (ja) * | 1989-06-06 | 1995-11-15 | 三菱電機株式会社 | エレベータのドア制御装置 |
| JPH04299096A (ja) * | 1991-03-27 | 1992-10-22 | Mitsubishi Electric Corp | エレベータドア制御装置 |
| JPH10210790A (ja) * | 1997-01-27 | 1998-08-07 | Toyota Motor Corp | 電力変換器の過熱保護装置、その機能を有する電気自動車のインバータ制御装置およびインバータ冷却装置 |
| JPH11292437A (ja) * | 1998-04-10 | 1999-10-26 | Hitachi Ltd | エレベータのドア制御装置 |
| JP2005104667A (ja) * | 2003-09-30 | 2005-04-21 | Mitsubishi Electric Corp | エレベータ扉の制御装置 |
| JP4411101B2 (ja) * | 2004-02-19 | 2010-02-10 | 三菱電機ビルテクノサービス株式会社 | 車椅子兼用エレベータの運転制御装置 |
| JP4432718B2 (ja) * | 2004-10-14 | 2010-03-17 | 富士電機システムズ株式会社 | 鉄道車両用ドア駆動装置 |
| JP2006256849A (ja) * | 2005-03-18 | 2006-09-28 | Toshiba Elevator Co Ltd | エレベータのドア制御装置 |
| JP4715373B2 (ja) * | 2005-08-01 | 2011-07-06 | 富士電機システムズ株式会社 | インバータ装置 |
-
2007
- 2007-07-04 JP JP2007176498A patent/JP5201545B2/ja active Active
-
2008
- 2008-07-04 CN CN200810128257XA patent/CN101337637B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN101337637B (zh) | 2011-04-06 |
| CN101337637A (zh) | 2009-01-07 |
| JP2009012928A (ja) | 2009-01-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5201545B2 (ja) | エレベータのドア制御装置 | |
| JP4864373B2 (ja) | モータ制御装置 | |
| JP4817084B2 (ja) | モータ駆動システム及びモータ制御装置 | |
| JP6483039B2 (ja) | 電力変換装置 | |
| JP5658785B2 (ja) | モータ制御装置 | |
| JP2012039847A (ja) | モータ制御装置およびモータ制御方法 | |
| EP3050772B1 (en) | Vehicle door opening and closing control device | |
| JP6193000B2 (ja) | エンコーダ異常検出装置及びエンコーダ異常検出装置を用いたエレベータ装置 | |
| EP2808454B1 (en) | Motor Controller and Construction Machine Provided Therewith | |
| JP2009155086A (ja) | エレベータのドア制御装置 | |
| JP5476681B2 (ja) | 昇降システムのモータ制御装置 | |
| JP2012240789A (ja) | エレベーターのドア制御装置 | |
| JP5473491B2 (ja) | エレベータの制御装置 | |
| JP4356761B2 (ja) | ファンモータ制御装置及びファンモータ制御方法 | |
| JP5764839B2 (ja) | エレベータのドア制御装置 | |
| JP5585218B2 (ja) | エレベータのドア制御装置 | |
| JP2006211831A (ja) | モータ駆動制御装置 | |
| WO2016174867A1 (ja) | モータの過負荷保護方法 | |
| JP2012082060A (ja) | エレベータ制御装置 | |
| JP2013132179A (ja) | インバータ制御エレベータの安全装置 | |
| JP6623112B2 (ja) | 巻上機および巻上機の制御方法 | |
| US20230155530A1 (en) | Motor control unit and motor device | |
| WO2018154621A1 (ja) | エレベーター | |
| JP5034914B2 (ja) | エレベータの制御装置 | |
| JP2006136064A (ja) | 同期モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100317 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120529 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120529 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120725 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130115 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130204 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5201545 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160222 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |