JP5131318B2 - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP5131318B2 JP5131318B2 JP2010135862A JP2010135862A JP5131318B2 JP 5131318 B2 JP5131318 B2 JP 5131318B2 JP 2010135862 A JP2010135862 A JP 2010135862A JP 2010135862 A JP2010135862 A JP 2010135862A JP 5131318 B2 JP5131318 B2 JP 5131318B2
- Authority
- JP
- Japan
- Prior art keywords
- angle
- phase
- count value
- value
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000001514 detection method Methods 0.000 claims description 98
- 238000012937 correction Methods 0.000 claims description 72
- 230000002159 abnormal effect Effects 0.000 claims description 17
- 238000000034 method Methods 0.000 description 59
- 230000005856 abnormality Effects 0.000 description 39
- 238000010586 diagram Methods 0.000 description 22
- 238000012545 processing Methods 0.000 description 16
- 238000004804 winding Methods 0.000 description 16
- 239000003550 marker Substances 0.000 description 8
- 230000007423 decrease Effects 0.000 description 4
- 230000005284 excitation Effects 0.000 description 4
- 230000003247 decreasing effect Effects 0.000 description 3
- 238000005259 measurement Methods 0.000 description 3
- 230000003321 amplification Effects 0.000 description 2
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 230000007257 malfunction Effects 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 230000003287 optical effect Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 238000004891 communication Methods 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 1
- 238000003754 machining Methods 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000010349 pulsation Effects 0.000 description 1
- 230000000630 rising effect Effects 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01P—MEASURING LINEAR OR ANGULAR SPEED, ACCELERATION, DECELERATION, OR SHOCK; INDICATING PRESENCE, ABSENCE, OR DIRECTION, OF MOVEMENT
- G01P3/00—Measuring linear or angular speed; Measuring differences of linear or angular speeds
- G01P3/42—Devices characterised by the use of electric or magnetic means
- G01P3/44—Devices characterised by the use of electric or magnetic means for measuring angular speed
- G01P3/48—Devices characterised by the use of electric or magnetic means for measuring angular speed by measuring frequency of generated current or voltage
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Transmission And Conversion Of Sensor Element Output (AREA)
- Control Of Electric Motors In General (AREA)
Description
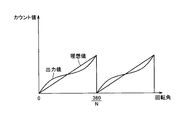
図20を参照して、横軸にはレゾルバの回転角を示し、縦軸には、回転角に対応するカウント値が示されている。レゾルバの特性をそのままデジタル値に変換した場合は理想値に対して出力値のずれが生じている。出力値を理想値に一致させる補正を行なうことにより、回転速度などが正確に算出できるようになる。
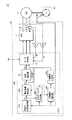
図1は、実施の形態1のモータ制御装置が適用される車両1の構成を示すブロック図である。
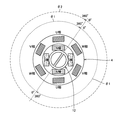
図2を参照して、軸倍角が2Xの場合のレゾルバについて例示して説明する。図2には、三相2極対のモータジェネレータ4に対して、軸倍角が2Xのレゾルバ12が取り付けられた状態が示されている。モータジェネレータ4は、ステータに各々2極のU相、V相、W相コイルを含み、ロータにN極、S極2対の永久磁石を含む。レゾルバ12はモータジェネレータ4の極数2に合わせて、軸倍角が2Xのものが選択されている。このように選択することにより、モータ制御の際に電気角θeのみを考えればよく、制御を簡単にすることができる。
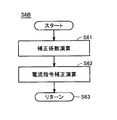
ステップS3の電気角判定の処理が終了すると、ステップS4においてトルク指令値を取得する処理が実行される。トルク指令値TRは、上位のECU(たとえば、ハイブリッド車両では、ハイブリッドECU)でアクセル開度等に基づいて決定され、通信で送られてくる。図1のモータ制御部44は、このトルク指令値TRを受信する。続いて、ステップS5において電流指令値を演算する処理が実行される。図1のIPMの直流電源電圧が可変制御されている場合には、直流電源電圧を取得するとともにθ3の変化に基づいてモータジェネレータ4の回転速度が計算される。そしてトルク指令値、直流電源電圧および回転速度に基づいて電流指令値が演算される。
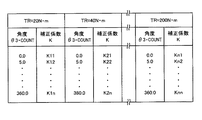
たとえば軸倍角2Xのレゾルバの場合は機械角で0°〜360°の1回転する間に電気角0°〜360°の変化が2度現れる。実施の形態1では、回転中に精度を学習補正していく場合など、1度目の電気角か2度目の電気角かを見分け、各々に対応する補正を行なえばよい場合に用いることができる。したがって、機械角の絶対位置を把握する必要は無かった。
図14を参照して、車両1Aは、レゾルバ12、CPU40に代えてレゾルバ12A、CPU40Aを含む点が、図1の車両1と異なる。他の部分については、車両1Aの構成は既に説明した車両1と同様であるので説明は繰返さない。
本実施の形態のモータ制御装置は、電気角の360°が機械角の360°よりも小さく設定され、モータの回転子の電気角に対応する二相エンコーダ信号を出力する電気角検出部(レゾルバ12およびR/Dコンバータ14)と、二相エンコーダ信号をカウントし、電気角に対応するデジタル値を出力する二相エンコーダカウンタ41と、二相エンコーダカウンタ41のカウント値の変化に基づいて、電気角検出部の出力する信号が示す電気角が機械角のいずれの位置に相当するかを検出する電気角数検出部42と、トルク指令値TRに基づいて電流指令値を決定し、電気角数検出部42の出力に応じて電流指令値を補正するモータ制御部44とを備える。
実施の形態1で説明したモータ制御装置では、位置検出器(レゾルバ+R/Dコンバータやエンコーダなど)が出力するZ相信号、A相信号およびB相信号を受けて電気角数の判定を行なう。しかし、何らかの影響で期待しないタイミングでZ相信号が入力された場合、電気角数の判定が正確に行なえない。たとえば、レゾルバ角0度付近でないタイミングにZ相信号が入力されると二相エンコーダカウンタがクリアされ、次の電気角になったと誤判定する可能性がある。
図16を参照して、車両1Bは、図1に示した車両1Bの構成においてインバータ装置2は、CPU40に代えてCPU40Bを含む。他の部分については、車両1Bの構成は既に説明した車両1と同様であるので説明は繰返さない。
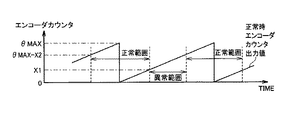
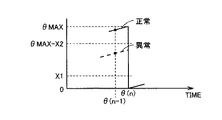
図18を参照して、カウント値θ1(n)の値がXmin以上、θmax以下である期間をTA、カウント値θ1(n)の値がθmin以上、Xmax以下である期間をTBとし、それ以外の期間をTCとする。Xmaxは、+0度付近のZ相入力正常判定しきい値を示し、Xminは、−0度付近のZ相入力正常判定しきい値を示す。
実施の形態1〜3では、回転子位置検出装置としてレゾルバを用いる例を示した。これに代えて回転子位置検出装置としてホール素子を用いる場合を説明する。
Claims (5)
- 出力信号の1周期分に相当する角度が機械角の360°よりも小さく設定された角度検出部と、
前記角度検出部の出力信号に対応するデジタル値を出力するカウンタと、
前記カウンタのカウント値の変化に基づいて、前記角度検出部の出力する信号が示す角度が機械角のいずれの位置に相当するかを検出する位置検出部と、
トルク指令値に基づいて電流指令値を決定し、前記位置検出部の出力に応じて前記電流指令値を補正するモータ制御部とを備え、
前記角度検出部は、電気角の360°が機械角の360°よりも小さく設定され、モータの回転子の電気角に対応する二相エンコーダ信号を出力する電気角検出部であり、
前記カウンタは、前記二相エンコーダ信号をカウントし、前記電気角に対応するデジタル値を出力する二相エンコーダカウンタであり、
前記位置検出部は、前記二相エンコーダカウンタのカウント値の変化に基づいて、前記電気角検出部の出力する信号が示す電気角が機械角のいずれの位置に相当するかを検出する電気角数検出部であり、
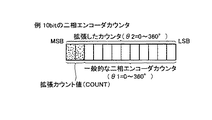
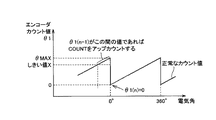
前記電気角数検出部は、前記二相エンコーダカウンタの上位ビットを機械角の360°に相当する値までさらに拡張したカウント値を、前記二相エンコーダカウンタのカウント値がカウントアップ中にゼロにクリアされたことに応じてカウントアップし、前記二相エンコーダカウンタのカウント値がゼロになった後にカウントダウンされて電気角の最大値に相当する値となったことに応じてカウントダウンすることによって、前記拡張したカウント値を生成し、
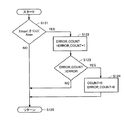
前記電気角数検出部は、前記二相エンコーダカウンタのカウント値が増加中において前記二相エンコーダカウンタのカウント値がクリアされた場合に、クリアされる直前の前記二相エンコーダカウンタのカウント値が異常タイミングに対応する所定範囲内であったことが発生した回数に応じて、前記拡張したカウント値をクリアする、モータ制御装置。 - 前記電気角検出部は、
電気角の360°が機械角の360°よりも小さく設定されたレゾルバと、
前記レゾルバの信号をデジタル値に変換するレゾルバ/デジタルコンバータとを含み、
前記レゾルバ/デジタルコンバータは、A相信号、B相信号およびZ相信号を含む前記二相エンコーダ信号を出力し、
前記二相エンコーダカウンタは、前記A相信号および前記B相信号に応じてカウントアップまたはカウントダウンを行ない、前記Z相信号が入力されるとカウント値をクリアする、請求項1に記載のモータ制御装置。 - 前記モータ制御部は、前記モータのロータの回転角が前記機械角のいずれの位置であるのかを前記電気角数検出部の出力に基づいて判断し、前記ロータの回転角に対応する補正を前記電流指令値に対して行なう、請求項1に記載のモータ制御装置。
- 前記モータ制御部は、トルク指令値と前記ロータの回転角に対応する補正係数とを保持するマップを有し、前記電流指令値に前記補正係数を掛けることにより補正を行なう、請求項3に記載のモータ制御装置。
- 前記位置検出部の出力に基づいて、機械角の正しい位置に対応する補正を前記カウンタが出力するデジタル値に対して行なう角度補正部をさらに備える、請求項1に記載のモータ制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010135862A JP5131318B2 (ja) | 2009-10-29 | 2010-06-15 | モータ制御装置 |
| CN201010532179.7A CN102055388B (zh) | 2009-10-29 | 2010-10-29 | 电动机控制设备 |
| US12/915,429 US8471506B2 (en) | 2009-10-29 | 2010-10-29 | Motor control apparatus |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009248876 | 2009-10-29 | ||
| JP2009248876 | 2009-10-29 | ||
| JP2010135862A JP5131318B2 (ja) | 2009-10-29 | 2010-06-15 | モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011120444A JP2011120444A (ja) | 2011-06-16 |
| JP5131318B2 true JP5131318B2 (ja) | 2013-01-30 |
Family
ID=43924670
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010135862A Expired - Fee Related JP5131318B2 (ja) | 2009-10-29 | 2010-06-15 | モータ制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8471506B2 (ja) |
| JP (1) | JP5131318B2 (ja) |
| CN (1) | CN102055388B (ja) |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8872511B2 (en) * | 2009-07-24 | 2014-10-28 | Toyota Jidosha Kabushiki Kaisha | Angle of rotation detection device |
| US8301324B2 (en) * | 2011-01-11 | 2012-10-30 | GM Global Technology Operations LLC | Wobble compensation of an encoder speed signal for an electric motor |
| JP5737123B2 (ja) * | 2011-10-12 | 2015-06-17 | 株式会社デンソー | 回転機の制御装置及び回転角算出装置 |
| JP5454962B2 (ja) * | 2011-12-05 | 2014-03-26 | 株式会社デンソー | モータ制御装置 |
| US8669728B2 (en) * | 2012-01-17 | 2014-03-11 | System General Corp. | Angle detection apparatus and method for rotor of motor |
| US9641107B2 (en) | 2012-10-15 | 2017-05-02 | Mitsubishi Electric Corporation | Motor controller for electric vehicle |
| JP5980095B2 (ja) * | 2012-11-06 | 2016-08-31 | 株式会社ミツバ | スイッチトリラクタンスモータの制御装置 |
| US9778071B2 (en) | 2014-06-12 | 2017-10-03 | Lear Corporation | Excitation signal generator for resolver |
| KR101551099B1 (ko) * | 2014-06-13 | 2015-09-08 | 현대자동차주식회사 | 모터 시스템의 고장 판정 방법 |
| JP6455111B2 (ja) * | 2014-12-05 | 2019-01-23 | 株式会社ジェイテクト | 回転角検出装置 |
| KR102419489B1 (ko) * | 2015-07-13 | 2022-07-12 | 현대모비스 주식회사 | 모터 속도 측정 장치 및 방법 |
| JP6598563B2 (ja) * | 2015-08-05 | 2019-10-30 | ルネサスエレクトロニクス株式会社 | 信号変換器及び制御装置 |
| JP6292208B2 (ja) * | 2015-11-05 | 2018-03-14 | トヨタ自動車株式会社 | ハイブリッド車両 |
| JP6667320B2 (ja) * | 2016-02-26 | 2020-03-18 | ルネサスエレクトロニクス株式会社 | 信号処理器及び制御装置 |
| US10184860B2 (en) * | 2016-04-08 | 2019-01-22 | Infineon Technologies Ag | Control system for power train control |
| JP6434445B2 (ja) | 2016-04-28 | 2018-12-05 | ファナック株式会社 | 一回転信号を検出するセンサの故障診断機能を有する工作機械の制御装置 |
| KR101836705B1 (ko) * | 2016-09-26 | 2018-03-09 | 현대자동차주식회사 | 정현파 생성 장치 및 방법 |
| JP6898079B2 (ja) * | 2016-11-16 | 2021-07-07 | 芝浦機械株式会社 | 工作機械およびその制御方法 |
| JP6589848B2 (ja) * | 2016-12-26 | 2019-10-16 | 株式会社デンソー | 診断装置 |
| US11038444B2 (en) * | 2017-08-18 | 2021-06-15 | Infineon Technologies Ag | Generation of motor drive signals with misalignment compensation |
| CN111034012B (zh) * | 2017-08-31 | 2023-09-19 | 三菱电机株式会社 | 致动器的控制装置及控制方法 |
| JP6975632B2 (ja) * | 2017-12-21 | 2021-12-01 | ルネサスエレクトロニクス株式会社 | 半導体装置及びその回転異常検出方法 |
| DE112018007527T5 (de) * | 2018-04-27 | 2021-01-14 | Mitsubishi Electric Corporation | Elektromotor-Steuervorrichtung |
| DE102019001461A1 (de) * | 2019-03-04 | 2020-09-10 | Nidec Drivexpert Gmbh | Verfahren zum schwingungs-und geräuschreduzierten Betreiben einer elektromotorischen Vorrichtung und elektromotorische Vorrichtung |
| JP7326822B2 (ja) * | 2019-04-03 | 2023-08-16 | 富士電機株式会社 | モータ制御装置 |
| JP7277295B2 (ja) * | 2019-07-10 | 2023-05-18 | ファナック株式会社 | サーボモータの制御装置 |
| WO2021144965A1 (ja) * | 2020-01-17 | 2021-07-22 | ヤマハ発動機株式会社 | アブソリュートエンコーダ及びアブソリュートエンコーダを備えるアクチュエータ |
| WO2021144966A1 (ja) | 2020-01-17 | 2021-07-22 | ヤマハ発動機株式会社 | 回転規制機構用回転体及びアクチュエータ |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5012169A (en) | 1988-07-20 | 1991-04-30 | Yokogawa Electric Corporation | Motor drive system |
| JPH0786771B2 (ja) * | 1989-04-04 | 1995-09-20 | 横河電機株式会社 | モータ・ドライブ・システム |
| JPH081388B2 (ja) * | 1990-05-15 | 1996-01-10 | シーケーディ株式会社 | レゾルバにおける補正データ作成方法及び角度検出装置 |
| JPH06288791A (ja) * | 1993-04-05 | 1994-10-18 | Sankyo Seiki Mfg Co Ltd | エンコーダ装置 |
| US5349294A (en) * | 1993-05-12 | 1994-09-20 | Picker International Inc. | Two and three-dimensionally selective RF pulses for magnetic resonance imaging |
| JP3564582B2 (ja) * | 1994-12-16 | 2004-09-15 | アイシン精機株式会社 | スイッチドレラクタンスモ−タの通電制御装置 |
| JPH11299227A (ja) | 1998-04-10 | 1999-10-29 | Sharp Corp | チャージポンプ回路 |
| JPH11337371A (ja) | 1998-05-27 | 1999-12-10 | Toyota Motor Corp | 回転機の回転角検出装置 |
| JP4239291B2 (ja) | 1999-04-28 | 2009-03-18 | 株式会社安川電機 | Acサーボモータ用エンコーダ |
| JP4019691B2 (ja) * | 2001-11-05 | 2007-12-12 | 株式会社ジェイテクト | 電動パワーステアリング装置 |
| JP2004061157A (ja) | 2002-07-25 | 2004-02-26 | Toyota Motor Corp | レゾルバの信号処理装置及び信号処理方法 |
| JP4059094B2 (ja) | 2003-02-03 | 2008-03-12 | トヨタ自動車株式会社 | 電動機制御装置および回転位置センサーのセンサー値の補正をコンピュータに実行させるためのプログラムを記録したコンピュータ読取り可能な記録媒体 |
| US6906491B2 (en) * | 2003-06-20 | 2005-06-14 | Rockwell Automation Technologies, Inc. | Motor control equipment |
| JP2005287133A (ja) * | 2004-03-29 | 2005-10-13 | Sanyo Electric Co Ltd | アクチュエータ装置、モータユニット及びコントローラユニット |
| JP4589093B2 (ja) * | 2004-12-10 | 2010-12-01 | 日立オートモティブシステムズ株式会社 | 同期モータ駆動装置及び方法 |
| JP2006238663A (ja) | 2005-02-28 | 2006-09-07 | Toshiba Corp | 電動機の制御装置 |
| JP4615333B2 (ja) * | 2005-03-03 | 2011-01-19 | 日立オートモティブシステムズ株式会社 | パワーステアリング装置 |
| JP2006262668A (ja) | 2005-03-18 | 2006-09-28 | Honda Motor Co Ltd | 電動パワーステアリング装置 |
| JP4270151B2 (ja) * | 2005-04-04 | 2009-05-27 | トヨタ自動車株式会社 | モータ制御装置及びこの装置を搭載する車両の制御装置 |
| JP2006335252A (ja) * | 2005-06-02 | 2006-12-14 | Jtekt Corp | 電動パワーステアリング装置 |
| JP2008259347A (ja) * | 2007-04-06 | 2008-10-23 | Toyota Motor Corp | モータ制御装置 |
| JP5091535B2 (ja) * | 2007-04-26 | 2012-12-05 | 三洋電機株式会社 | モータ制御装置 |
| JP5141149B2 (ja) | 2007-09-19 | 2013-02-13 | トヨタ自動車株式会社 | モータ制御装置およびそれを搭載する車両 |
| JP5167456B2 (ja) * | 2008-03-17 | 2013-03-21 | 多摩川精機株式会社 | アブソリュートセンサの多回転検出方法 |
-
2010
- 2010-06-15 JP JP2010135862A patent/JP5131318B2/ja not_active Expired - Fee Related
- 2010-10-29 US US12/915,429 patent/US8471506B2/en active Active
- 2010-10-29 CN CN201010532179.7A patent/CN102055388B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102055388B (zh) | 2014-01-08 |
| US8471506B2 (en) | 2013-06-25 |
| JP2011120444A (ja) | 2011-06-16 |
| CN102055388A (zh) | 2011-05-11 |
| US20110101899A1 (en) | 2011-05-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5131318B2 (ja) | モータ制御装置 | |
| JP5494662B2 (ja) | 回転角検出装置 | |
| JP5502605B2 (ja) | モータ制御装置 | |
| CN107592041B (zh) | 用于同步mdps电机和电机位置传感器的方法和装置 | |
| CN103098366B (zh) | 相位偏移检测装置、马达驱动装置、无刷马达以及相位偏移检测方法 | |
| JP4589093B2 (ja) | 同期モータ駆動装置及び方法 | |
| US7800336B2 (en) | Control system for synchronous electric motor | |
| US6525502B1 (en) | Closed loop control of motor position and velocity | |
| JP2010220472A (ja) | 同期モータ駆動装置 | |
| JP2016082685A (ja) | ブラシレスモータ及び電動パワーステアリング装置 | |
| US20180167003A1 (en) | Lead angle controller | |
| WO2019054475A1 (ja) | モータ駆動システムおよびモータの制御方法 | |
| KR101655297B1 (ko) | 리니어 홀 센서 위치보정장치 및 그 위치보정방법 | |
| JP7291104B2 (ja) | 3相ブラシレスモーター及び3相ブラシレスモーターの回転位置検出方法 | |
| JP5396754B2 (ja) | 出力推定装置 | |
| JP2006081230A (ja) | モータ駆動制御装置および電動パワーステアリング装置 | |
| JP7186846B1 (ja) | 角度検出装置及び交流回転機の制御システム | |
| JP2006033928A (ja) | ブラシレスモータ | |
| WO2022054232A1 (ja) | 回転機の制御装置 | |
| WO2023175935A1 (ja) | モータ制御装置、磁極位置計算方法 | |
| JP2010048774A (ja) | 位置センサ | |
| JP2020190499A (ja) | エンコーダ装置 | |
| US20120180592A1 (en) | Electrical machine apparatus and robot | |
| JPWO2004054086A1 (ja) | モータ駆動制御装置および電動パワーステアリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111108 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111215 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121009 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121022 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151116 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5131318 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151116 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |