JP4881430B2 - 振動減衰式のハンドグリップを有する手持ち式工作機械 - Google Patents
振動減衰式のハンドグリップを有する手持ち式工作機械 Download PDFInfo
- Publication number
- JP4881430B2 JP4881430B2 JP2009508285A JP2009508285A JP4881430B2 JP 4881430 B2 JP4881430 B2 JP 4881430B2 JP 2009508285 A JP2009508285 A JP 2009508285A JP 2009508285 A JP2009508285 A JP 2009508285A JP 4881430 B2 JP4881430 B2 JP 4881430B2
- Authority
- JP
- Japan
- Prior art keywords
- machine tool
- casing
- hand
- lever
- held machine
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000013016 damping Methods 0.000 title claims description 8
- 230000008878 coupling Effects 0.000 claims description 23
- 238000010168 coupling process Methods 0.000 claims description 23
- 238000005859 coupling reaction Methods 0.000 claims description 23
- 230000033001 locomotion Effects 0.000 claims description 12
- 230000006835 compression Effects 0.000 claims description 8
- 238000007906 compression Methods 0.000 claims description 8
- 230000000295 complement effect Effects 0.000 claims description 4
- 238000005553 drilling Methods 0.000 claims description 4
- 238000002955 isolation Methods 0.000 description 4
- 238000005192 partition Methods 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 230000001360 synchronised effect Effects 0.000 description 3
- 230000002035 prolonged effect Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 1
- 239000000383 hazardous chemical Substances 0.000 description 1
- 231100000206 health hazard Toxicity 0.000 description 1
- 238000000926 separation method Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25D—PERCUSSIVE TOOLS
- B25D17/00—Details of, or accessories for, portable power-driven percussive tools
- B25D17/04—Handles; Handle mountings
- B25D17/043—Handles resiliently mounted relative to the hammer housing
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Percussive Tools And Related Accessories (AREA)
Description
特に、打撃式の駆動装置を有する手持ち式工作機械、たとえば穿孔ハンマ、たがねハンマおよびこれに類似するものでは、手持ち式工作機械は著しい振動を生ぜしめる。この振動が、手持ち式工作機械を工作物に対して押し当てるために働くハンドグリップに伝達されると、作業員に不快に感じられるだけでなく、長時間にわたる暴露は健康被害にもつながり得る。このことから、穿孔ハンマの直線的な振動減衰のために、これまでにはダブルシェル型のケーシングが使用されていた。ダブルシェル型のケーシングでは、ハンマ全体が、外側のシェル内に、その作業方向でばね弾性的に懸吊されている。この構造は、比較的費用のかかるものであり、従って高価でもある。
この課題は、請求項1の特徴部に記載の特徴、すなわち連結部材が、該連結部材の運動を同期化する結合エレメントによって、互いに結合されていることによって解決される。
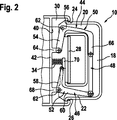
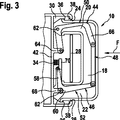
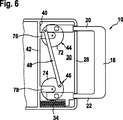
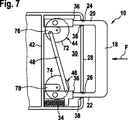
以下に本発明の実施例を図面に付き詳しく説明する。図1は、手持ち式工作機械の簡略化した概略的な側面図であり、図2は、図1に示した手持ち式工作機械の後側グリップ領域を、ハンドグリップが負荷されていない状態で部分的に断面し拡大した側面図であり、図3は、ハンドグリップに押圧力を加え、手持ち式工作機械を工作物に押し当てた後の状態を示す図2に一致する図であり、図4は、手持ち式工作機械の別の実施例の後側グリップ領域を、ハンドグリップが負荷されていない状態で部分的に断面し拡大した側面図であり、図5は、ハンドグリップに押圧力を加え、手持ち式工作機械を工作物に押し当てた後の状態を示す図4に一致する図であり、図6は、手持ち式工作機械のさらに別の実施例の後側グリップ領域を、ハンドグリップが負荷されていない状態で部分的に断面し拡大した側面図であり、図7は、ハンドグリップに押圧力を加え、手持ち式工作機械を工作物に押し当てた後の状態を示す図6に一致する図である。
図1に概略的に示した穿孔ハンマまたは打撃ハンマの形式の手持ち式工作機械2は、主にケーシング4と、工具8を収容するための工具ホルダ6と、ケーシング4に取り囲まれた駆動装置(図示せず)とを有していて、該駆動装置は、工具ホルダ6内に差し込まれた工具8の回転駆動および/または打撃駆動のために働く。
Claims (8)
- 手持ち式工作機械、殊に穿孔ハンマおよび/または打撃ハンマであって、ケーシングと、該ケーシングに対してばね弾性的に支持された振動減衰式のハンドグリップとが設けられており、該ハンドグリップが、ほぼ平行な2つの脚部を有しており、さらに各脚部とケーシングとの間にそれぞれ配置され、かつ脚部とケーシングとに枢着結合されている連結部材が設けられている形式のものにおいて、連結部材(44,46)が、該連結部材(44,46)の運動を同期化する結合エレメント(48)によって互いに結合されており、前記結合エレメント(48)が、ケーシング(4)および/またはハンドグリップ(10)に結合されておらず、結合エレメント(48)が、工作機械(2)の作業方向(A)に対して実質的に横方向に配向されており、結合エレメント(48)の、互いに反対側にある端部が、連結部材(44,46)に枢着されていることを特徴とする、手持ち式工作機械。
- 結合エレメント(48)が、中空状のハンドグリップ(10)の内側に配置されている、請求項1記載の手持ち式工作機械。
- 少なくとも1つの連結部材(44,46)が、脚部(20,22)の開かれた端部を通って、ハンドグリップ(10)の中空状の内部に突入している、請求項2記載の手持ち式工作機械。
- 少なくとも1つの連結部材(44)が、2アーム式のレバー(50)として形成されていて、該レバー(50)の一方のレバーアーム(54)が、ケーシング(4)に枢着結合されていて、他方のレバーアーム(56)が、結合エレメント(48)に枢着結合されており、レバー(50)が、両レバーアーム(54,56)の間で、ハンドグリップ(10)の脚部(20)に枢着結合されている、請求項1から3までのいずれか1項記載の手持ち式工作機械。
- 少なくとも1つの連結部材(46)が、2アーム式のレバー(52)として形成されていて、該レバー(52)の一方のレバーアーム(58)が、ハンドグリップ(10)の脚部(22)に枢着結合されていて、他方のレバーアーム(60)が、結合エレメント(48)に枢着結合されていて、レバー(52)が、両レバーアーム(58,60)の間で、ケーシング(4)に枢着結合されている、請求項1から4までのいずれか1項記載の手持ち式工作機械。
- 少なくとも1つの連結部材(44,46)が、ディスク(72,74)として形成されていて、該ディスク(72,74)が、その中心でケーシング(4)に旋回可能に結合されていて、かつ中心から間隔を保って脚部(20,22)および結合エレメント(48)に枢着結合されている、請求項1から3までのいずれか1項記載の手持ち式工作機械。
- ハンドグリップ(10)とケーシング(4)との間に配置された少なくとも1つの圧縮ばね(34)が設けられている、請求項1から6までのいずれか1項記載の手持ち式工作機械。
- 圧縮ばね(34)が、ハンドグリップ(10)を、負荷されていない状態で後方に向かって、後側終端位置へ押圧し、該後側終端位置では、ハンドグリップ(10)の脚部(20,22)に設けられた、後方に向けられたストッパ面(36)が、ケーシング(4)の、ストッパ面(36)に対して相補的かつ作業方向Aで前方に向けられたストッパ面(38)に当て付けられ、該ストッパ面(38)が、ケーシング(4)の壁部分(28)の内面に開口(24,26)の周囲に形成されている、請求項7記載の手持ち式工作機械。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102006021307A DE102006021307A1 (de) | 2006-05-08 | 2006-05-08 | Handwerkzeugmaschine mit einem vibrationsgedämpften Handgriff |
| DE102006021307.6 | 2006-05-08 | ||
| PCT/EP2007/053352 WO2007128634A1 (de) | 2006-05-08 | 2007-04-05 | Handwerkzeugmaschine mit einem vibrationsgedämpften handgriff |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009536101A JP2009536101A (ja) | 2009-10-08 |
| JP4881430B2 true JP4881430B2 (ja) | 2012-02-22 |
Family
ID=38164431
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009508285A Expired - Fee Related JP4881430B2 (ja) | 2006-05-08 | 2007-04-05 | 振動減衰式のハンドグリップを有する手持ち式工作機械 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8061438B2 (ja) |
| EP (1) | EP2018249A1 (ja) |
| JP (1) | JP4881430B2 (ja) |
| CN (1) | CN101437655B (ja) |
| DE (1) | DE102006021307A1 (ja) |
| WO (1) | WO2007128634A1 (ja) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102006016442A1 (de) * | 2006-04-07 | 2007-10-11 | Robert Bosch Gmbh | Handwerkzeugmaschine mit vibrationsgedämpftem Handgriff |
| DE102006051924A1 (de) * | 2006-11-03 | 2008-05-15 | Robert Bosch Gmbh | Handwerkzeugmaschine mit einem vibrationsgedämpften, mit einem Schalter versehenen Handgriff |
| GB2451293A (en) * | 2007-07-27 | 2009-01-28 | Black & Decker Inc | Hammer drill with slidably mounted handle |
| DE102007061715A1 (de) * | 2007-12-19 | 2009-06-25 | Robert Bosch Gmbh | Griffvorrichtung, insbesondere Handwerkzeugmaschinengriffvorrichtung |
| JP5180697B2 (ja) * | 2008-06-19 | 2013-04-10 | 株式会社マキタ | 手持式作業工具 |
| JP5361504B2 (ja) * | 2009-04-10 | 2013-12-04 | 株式会社マキタ | 打撃工具 |
| JP5395531B2 (ja) * | 2009-06-19 | 2014-01-22 | 株式会社マキタ | 作業工具 |
| CN102802876B (zh) * | 2009-06-25 | 2015-03-25 | 阿特拉斯科普柯建筑设备有限公司 | 手持式拆除工具 |
| US20120048580A1 (en) * | 2010-09-01 | 2012-03-01 | Hilti Aktiengesellschaft | Power tool |
| GB201112825D0 (en) * | 2011-07-26 | 2011-09-07 | Black & Decker Inc | A hammer drill |
| GB201112833D0 (en) * | 2011-07-26 | 2011-09-07 | Black & Decker Inc | A hammer drill |
| EP2809470B1 (en) | 2012-02-03 | 2020-01-15 | Milwaukee Electric Tool Corporation | Rotary hammer |
| US9849577B2 (en) | 2012-02-03 | 2017-12-26 | Milwaukee Electric Tool Corporation | Rotary hammer |
| DE102012103587A1 (de) * | 2012-04-24 | 2013-10-24 | C. & E. Fein Gmbh | Handführbare Werkzeugmaschine mit Außengehäuse |
| JP2015089593A (ja) * | 2013-11-05 | 2015-05-11 | 株式会社マキタ | 作業工具 |
| CN112119189A (zh) * | 2018-05-29 | 2020-12-22 | 罗贝尔铁路建筑机械有限责任公司 | 用于拧紧和松开轨道上的螺母和螺钉的冲击扳手 |
| EP3959036A4 (en) | 2019-06-12 | 2023-03-29 | Milwaukee Electric Tool Corporation | ROTARY POWER TOOL |
| JP7624319B2 (ja) * | 2021-02-04 | 2025-01-30 | 株式会社マキタ | 打撃工具 |
| JP7585085B2 (ja) * | 2021-02-22 | 2024-11-18 | 株式会社マキタ | 打撃工具 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5981027A (ja) * | 1982-10-29 | 1984-05-10 | Sony Corp | 移動テ−ブル駆動機構 |
| JPH02185378A (ja) * | 1988-11-19 | 1990-07-19 | Hilti Ag | 衝撃機構を有する携帯可能な手持ち式装置 |
| JP2004518553A (ja) * | 2001-04-11 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 振動減衰式のハンドグリップを備えた手持ち工作機械 |
| JP2004521771A (ja) * | 2001-07-24 | 2004-07-22 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 振動減衰式のハンドグリップを備えた手持ち式工作機械 |
| JP2005138281A (ja) * | 2003-11-04 | 2005-06-02 | Black & Decker Inc | 電動工具用振動低減装置及びそのような装置を組み込んだ電動工具 |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3322211A (en) * | 1964-05-06 | 1967-05-30 | Novosib Elektrotekhnichesky I | Elastic handle for vibrating-impact mechanisms |
| DE3447401A1 (de) * | 1984-12-24 | 1986-07-03 | Wacker-Werke Gmbh & Co Kg, 8077 Reichertshofen | Hammer mit schutzhaube |
| DE3716701A1 (de) * | 1987-05-19 | 1988-12-01 | Porsche Ag | Aerodynamisch ausgebildetes verkleidungsteil fuer die unterseite eines kraftfahrzeuges |
| PL153240B1 (en) * | 1988-03-29 | 1991-03-29 | Politechnika Poznanska | Vibration damping arrangement for hand tools |
| DE4104917A1 (de) * | 1991-02-18 | 1992-08-20 | Gerlach Rainer | Anordnung zur schwingungsberuhigung von griffelementen an erregten massen |
| DE10034768A1 (de) * | 2000-07-18 | 2002-02-07 | Bosch Gmbh Robert | Elektrokombihammer |
| DE10138123A1 (de) | 2001-08-03 | 2003-02-27 | Bosch Gmbh Robert | Handwerkzeugmaschine mit vibrationsgedämpftem Handgriff |
| GB2402098B (en) * | 2003-05-21 | 2007-10-17 | Black & Decker Inc | Vibration reduction apparatus for power tool and power tool incorporating such apparatus |
| GB2407791A (en) * | 2003-11-04 | 2005-05-11 | Black & Decker Inc | Vibration reduction apparatus for a power tool |
| DE102004019776A1 (de) | 2004-04-23 | 2005-11-17 | Robert Bosch Gmbh | Handwerkzeugmaschine, insbesondere Bohr- und/oder Schlaghammer |
-
2006
- 2006-05-08 DE DE102006021307A patent/DE102006021307A1/de not_active Withdrawn
-
2007
- 2007-04-05 WO PCT/EP2007/053352 patent/WO2007128634A1/de active Application Filing
- 2007-04-05 JP JP2009508285A patent/JP4881430B2/ja not_active Expired - Fee Related
- 2007-04-05 US US12/094,458 patent/US8061438B2/en not_active Expired - Fee Related
- 2007-04-05 CN CN2007800165125A patent/CN101437655B/zh not_active Expired - Fee Related
- 2007-04-05 EP EP07727820A patent/EP2018249A1/de not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5981027A (ja) * | 1982-10-29 | 1984-05-10 | Sony Corp | 移動テ−ブル駆動機構 |
| JPH02185378A (ja) * | 1988-11-19 | 1990-07-19 | Hilti Ag | 衝撃機構を有する携帯可能な手持ち式装置 |
| JP2004518553A (ja) * | 2001-04-11 | 2004-06-24 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 振動減衰式のハンドグリップを備えた手持ち工作機械 |
| JP2004521771A (ja) * | 2001-07-24 | 2004-07-22 | ローベルト ボツシユ ゲゼルシヤフト ミツト ベシユレンクテル ハフツング | 振動減衰式のハンドグリップを備えた手持ち式工作機械 |
| JP2005138281A (ja) * | 2003-11-04 | 2005-06-02 | Black & Decker Inc | 電動工具用振動低減装置及びそのような装置を組み込んだ電動工具 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20080283261A1 (en) | 2008-11-20 |
| CN101437655B (zh) | 2011-08-03 |
| EP2018249A1 (de) | 2009-01-28 |
| DE102006021307A1 (de) | 2007-11-15 |
| JP2009536101A (ja) | 2009-10-08 |
| WO2007128634A1 (de) | 2007-11-15 |
| CN101437655A (zh) | 2009-05-20 |
| US8061438B2 (en) | 2011-11-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4881430B2 (ja) | 振動減衰式のハンドグリップを有する手持ち式工作機械 | |
| US7971656B2 (en) | Hand-held power tool with a vibration-damped handle with a switch | |
| JP4157382B2 (ja) | 振動減衰式のハンドグリップを備えた手持ち工作機械 | |
| US7971655B2 (en) | Hand-held power tool with a vibration-damped rounded handle | |
| JP5416905B2 (ja) | 手工具装置 | |
| JP4718633B2 (ja) | 振動緩衝ハンドルを備えた手持ち式工作機械 | |
| US7513317B2 (en) | Impact tool with vibration control mechanism | |
| JP6096593B2 (ja) | 往復動式作業工具 | |
| JP5294726B2 (ja) | 手持式作業工具 | |
| WO2011077824A1 (ja) | 打撃工具 | |
| JP6620434B2 (ja) | 打撃工具 | |
| EP1188505A2 (en) | Reciprocating cutting tools | |
| US6317988B1 (en) | Saber saw having shoe to be pressed against workpiece | |
| JP2009536100A5 (ja) | ||
| JPS61188088A (ja) | ドリルハンマ | |
| JP2009509790A (ja) | 電動工作機械 | |
| JP7007901B2 (ja) | 集塵装置および作業工具 | |
| JP2006159308A (ja) | 往復動式作業工具 | |
| JP5075625B2 (ja) | 可動支持型衝撃機構を備えた衝撃工具 | |
| JP7001953B2 (ja) | ハンマドリル | |
| JP2007237301A (ja) | 電動工具 | |
| CN115533705A (zh) | 电动工具 | |
| JP4290582B2 (ja) | 往復作動式作業工具 | |
| JPH10217152A (ja) | 手持ち式工作機械 | |
| JP6924578B2 (ja) | 電動工具 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20101227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110121 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110302 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110531 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20111104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20111202 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141209 Year of fee payment: 3 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |