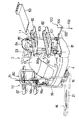
図1に、本発明に係る乗用作業機の一例としての乗用田植機が示されている。この乗用田植機は、操向可能な前輪1と主推進車輪としての後輪2を備えた四輪駆動型の走行機体3の後部に、油圧駆動されるリンク機構4を介して苗植付け装置5を昇降可能に連結して構成されている。走行機体3の前部に搭載されたエンジン6と、前輪1を支持したミッションケース7とがベルト伝動装置8を介して連動連結され、ミッションケース7内でギヤ変速および正逆転切換えされた動力で前輪1が駆動されるとともに、ミッションケース7から取り出された走行用変速動力が後部伝動ケース9に軸伝達されて、後輪2が前輪1と同調した速度で駆動され、かつ、ミッションケース7の後部から取り出された作業用動力が前記苗植付け装置5に軸伝達されるようになっている。
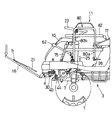
図2〜図4に示すように、走行機体3の前部には前記エンジン6を収容したエンジンボンネット10が配備されるとともに、その左右の横外側には予備苗のせ台11が立設され、かつ、エンジンボンネット10と予備苗のせ台11との間に、機体前端と運転部との間の歩行移動を許容するための乗降通路12が形成されている。
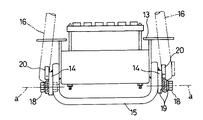
走行機体3の前端下部にはバッテリ搭載用の前フレーム13が備えられるとともに、この前フレーム13の前部から左右側部を囲むように設けられたガードフレーム14の前部が、パイプ材をU形に屈曲した牽引フレーム15で構成されている。そして、前記ガードフレーム14の左右外側に、地上操縦用の操作アーム16が横向きの支点a周りに起伏揺動可能に取付けられている。この操作アーム16は、丸パイプ材を下拡がりのアーチ形に屈曲するとともにその中間部をステー16aで連結してA字形に構成したものであり、前記乗降通路12での歩行移動を妨げないようにエンジンボンネット10の横幅内に納まる幅に構成されるとともに、鉛直に起立された時に操作アーム16の上端が、運転座席17に着座した作業者がエンジンボンネット10越しに目視確認できる高さに位置するよう構成されている。また、操作アーム16の左右基端部が、前フレーム13の左右側部に起伏揺動可能にボルト18で枢支連結されるとともに、一方のボルト連結箇所に装備した皿バネ19を締めつけることで、操作アーム16の起伏揺動に適度の摩擦抵抗が付与され、手動では任意に起伏操作でき、かつ、起立した姿勢を摩擦保持することができるようになっている。
また、前記前フレーム13の左右外側にはストッパ20が溶接固定されており、図6(イ)で示すように、操作アーム16の基部がこのストッパ20の前端に接当することで操作アーム16の起立限界が規制されるとともに、図6(ロ)で示すように、操作アーム16の基部延長部がストッパ20の下面に接当することで、操作アーム16の前方へ倒伏限界が規制されるようになっている。そして、限界まで起立された操作アーム16は略鉛直の格納姿勢となり、限界まで倒伏された作用姿勢の操作アーム16は少し前上がり傾斜した状態となる。
また、倒伏作用姿勢の操作アーム16を押し下げ操作したり、前方に引っ張り操作しやすいように、操作アーム16の先端部は、横握りできるに足る適当な幅の横向き握り部16bに構成されている。また、操作アーム16のステー16aの後面には、機体の左右中心を示す照準具としてのセンターマスコット21が支点bを中心に起伏回動自在に装備されるとともに、ステー16aの前面には、操作アーム16の商用ニックネームや本機の機種名などを表示した銘板22が貼付けられている。
前記操作アーム16は、手動で任意に起伏揺動操作できるのであるが、比較的重量の大きい操作アーム16の起立揺動操作を補助するために、以下のような起立付勢機構30が備えられている。つまり、図6および図7に示すように、操作アーム16における左側の支点近くに備えた連係金具16cから後方に向けてロッド31が延出されるとともに、このロッド31が前フレーム13の左側に設けた固定ブラケット32を挿通して後方に突出され、ロッド31の先端部に備えたバネ受け座金33と固定ブラケット32との間にコイルバネ34が装着され、操作アーム16が起立姿勢から前方に倒伏揺動されるに連れてロッド31が前方に引き出されてコイルバネ34が圧縮変形され、このコイルバネ34の弾性復元力によって操作アーム16が起立方向に付勢されるようになっている。
ここで、操作アーム16が鉛直の起立限界位置から少し前方に揺動させた範囲では、コイルバネ34による起立付勢力よりも支点aにおける摩擦抵抗の方が大きく設定されており、この揺動範囲では操作アーム16を任意の起立角度で保持しておくことができる。つまり、センターマスコット21の位置を、ある程度の範囲で前後に位置調節して保持することができ、センターマスコット21を運転者の見やすい位置に設定して使用することができるようになっている。また、操作アーム16を大きく前方に倒伏させた状態では、コイルバネ34による起立付勢力が支点aにおける摩擦抵抗より大きいので、操作アーム16から手を放せばある程度起立した位置までは自動的に復帰揺動する。
なお、前記ロッド31とコイルバネ34の組付けは以下のように行われる。つまり、先ず、図7(ロ)に示すように、組付け前のロッド31にバネ受け座金33およびコイルバネ34を装着し、バネ受け座金33に受け止めさせたコイルバネ34を治具などを用いて圧縮するとともに、ロッド31の中間に予め形成したピン孔35に仮止めピン36を挿入し、圧縮したコイルバネ34の復元を阻止した状態にする。次に、コイルバネ34を圧縮装着したロッド31を、固定ブラケット32に横向きに切り欠き形成したロッド挿通孔37に側方から挿入し、ロッド31の前端を、予め支点aに装着した操作アーム16の下端部に枢支連結する。次に、操作アーム16を支点a周りに前方に大きく倒伏操作して、図6(ロ)中に示す位置までロッド31を前方に引き出す。これによって、予め圧縮したコイルバネ34の前端を受け止めていた仮止めピン36が固定ブラケット32のロッド挿通孔37を前方に通過する。この時、コイルバネ34は固定ブラケット32に受け止められて更に圧縮変形されるのに対して、仮止めピン36はコイルバネ34から外れて固定ブラケット32の前方に露出することになり、コイルバネ34の反力を受けない自由状態になっている仮止めピン36はロッド31から簡単に抜き取ることができ、これによって、ロッド31とコイルバネ34の組付けが完了する。
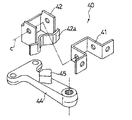
また、操作アーム16の基部近くには、この操作アーム16が前方に倒伏されると、前輪1の操向を制限規制する操向牽制機構40が以下のように構成されて配備されている。つまり、図6および図7に示すように、前記ミッションケース7の前端部に固設したブラケット41に、操向牽制部材42が支軸43を介して横向き軸心c周りに回動可能に取付けられるとともに、ミッションケース7に装備された前輪操向用のピットマンアーム44の上面に、前記操向牽制部材42が係合作用する突起45が設けられている。また、前記支軸43に外嵌装着した捩じりバネ46の上方延出端46aが前記ロッド31の後端部に巻き付けられてピン47で外れ止め支持されるとともに、捩じりバネ46の下方延出端46bが前記操向牽制部材42に係止連結されており、ロッド31の前方移動に伴って捩じりバネ46の上方延出端46aが前方に押圧移動されることで、捩じりバネ46の全体が支軸43周りに回動して下方延出端46bが後方に移動し、もって、この下方延出端46bに係止された操向牽制部材42が軸心c周りに図中反時計方向に回動されて、操向牽制部材42の下端部に設けた係合作用部42aがピットマンアーム44の突起45に前方から弾性的に係合作用し、ロッド31の前方移動量が多くなるに連れて捩じりバネ46の捩じり変形量が大きくなって、係合作用部42aの突起45への係合押圧作用が強くなってゆく。
そして、図7(イ)中に示すように、前記突起45は前方に向かう山形に形成されるとともに、操向牽制部材42の前記係合作用部42aは後ろ向きに開放されたV形に形成されており、ピットマンアーム44が直進位置から多少左右に操向されていても、V形の係合作用部42aが山形の突起45に押圧係合されることで、ピットマンアーム44が直進位置に修正されてその位置に安定良く係合保持される。従って、操作アーム16を前方に大きく倒伏させると、ピットマンアーム44が直進位置に安定保持され、路面の凹凸などによって前輪1が勝手に操向されてしまうことが牽制阻止される。
ただし、操向牽制部材42の係合作用部42aはピットマンアーム44の突起45に弾性的に係合されているので、運転部のステアリングハンドル23を無理に回動操作すれば、突起45が操向牽制部材42を捩じりバネ46に抗して前方に押しやりながら係合作用部42aを乗り越え移動させるように、ピットマンアーム44を操向操作することが可能である。つまり、操作アーム16が倒伏操作されて操向牽制機構40が作動状態にあると、前輪1が路面の凹凸などによって勝手には操向されないが、別の作業者が無理にステアリングハンドル23をきれば前輪1を操向させることができるのである。
また、操作アーム16と操向牽制機構40とを連係するロッド31の先端に、捩じりバネ46の上方延出端46aを受けるよう装着されたピン47は、その装着位置が変更可能となっており、この装着位置の変更によって、操向牽制機構40が牽制作動を開始する時の操作アーム16の倒伏角度を調節することができる。
前記ベルト伝動装置8は、図10に示すように、エンジン6の出力軸6aとミッションケース7の入力軸7aのそれぞれに、伝動比の異なる2組の出力プーリ51a,51bおよび入力プーリ52a,52bにそれぞれベルト53a,53bを巻回し、各ベルト53a,53bに作用するテンションローラ54a,54bのいずれかを選択作用させることで、「高」「低」2段の変速を行うよう構成された、いわゆるダブルテンション式の変速機能を備えており、各テンションローラ54a,54bを備えたテンションアーム55a,55bが、運転座席17の左横脇に配備された副変速レバー24に、2組のリンク機構56a,56bを介して連係されている。なお、前記ミッションケース7内の主ギヤ変速装置を3段に変速操作して、移動走行用の「高速」、植付け走行用の「低速」、および、畦越えや車両への積み降ろしの「超低速」の切り換え選択を行う主変速レバー25が、運転部ステップ26の中央前部に横移動操作可能に立設されるとともに、前後揺動によってミッションケース7内でのギヤシフトを行って前進と後進の選択を行うシャトルレバー27がステアリングハンドル23の左脇に配備されている。
ここで、2段の変速を行う前記2組のテンションローラ54a,54bが主クラッチ57としても機能するよう構成されている。つまり、運転部ステップ26の左側前部に配備された主クラッチペダル58のペダルアーム58aに接当部59が備えられるとともに、前記ベルト伝動装置8における両テンションアーム55a,55bの基端延長部が前記接当部59に対向配備されており、主クラッチペダル58を踏み込み操作することで、両テンションアーム55a,55bが共に「クラッチ切り」側に操作されて、エンジン6からミッションケース7への伝動を断つ、いわゆる、テンションクラッチ式の主クラッチ57が構成されている。また、この主クラッチ57の伝動下手には、ミッションケース7の入力軸7aを制動して機体停止を行うブレーキ60が備えられている。
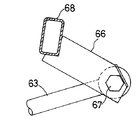
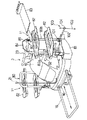
図11および図12に示すように、前記ペダルアーム58aを遊嵌支持した支点軸61に、前記主クラッチ57とブレーキ60を同時操作するための停止レバー62と、ブレーキアーム63とがそれぞれが遊嵌支持されて前方に延出されるとともに、ペダルアーム58aと停止レバー62は、それぞれ捩じりバネ64,65によって上方に復帰付勢されている。なお、支点軸61の先端には、ペダルアーム58a、停止レバー62、および、ブレーキアーム63の抜け止めを図る座金66がボルト67を介して装着されており、図14に示すように、この座金66の延出端が機体フレームを構成する横フレーム68に回動不能に係合されるとともに、座金66の一部がボルト67の頭部偏平面に係合するよう屈曲され、もって、ボルト67の回り止めがなされている。
前記停止レバー62は、ペダルアーム58aに上方から交差するよう配備されており、停止レバー62を下方に揺動操作すると、ペダルアーム58aが上方からの停止レバー62の片当たりによって押し下げ操作されて主クラッチ57が切られ、主クラッチペダル58が踏み込み操作された時には、停止レバー62は復帰位置に残されるようになっている。なお、停止レバー62は、前記乗降通路12での歩行移動の邪魔にならないように、エンジンボンネット10の左側面に接近して配備されている。ここで、エンジンボンネット10の左右側面は外方に三次元的に凸曲した湾曲面に形成されるとともに、停止レバー62がボンネット側面の凸曲頂部よりも前方にまで延出されているので、レバー本体をボンネット側面に接近して配置しても、レバー握り部62bをボンネット側面から離して握り操作しやすい状態に配備することができる。
また、前記ブレーキアーム63の先端には、前記ベルト伝動装置8における入力プーリ52a,52bのうちの外方の入力プーリ52aのベルト巻掛け溝に作用するブレーキパッド70が備えられるとともに、停止レバー62とブレーキアーム63とが、圧縮コイルバネ71を外嵌したロッド72を介して連動連結されており、停止レバー62を押し下げて主クラッチ57を切り操作するのに伴って、ブレーキアーム63も下方に操作されて、入力プーリ52aに制動がかかるように前記ブレーキ60が構成されている。ここで、停止レバー62を押し下げ操作すると、主クラッチ57が完全に切られる前にブレーキ60が先行して利き始めるように主クラッチ57とブレーキ60の作動タイミングが設定されている。
なお、図13に示すように、ブレーキアーム63が復帰したブレーキ解除位置においても、前記ブレーキパッド70は入力プーリ52aの溝内に少し係入されており、ブレーキアーム63が多少横移動しても、ブレーキ作用時にはブレーキパッド70が正しく入力プーリ52aの溝内に圧入されるようになっている。また、ロッド72の下端に備えたピン73の装着位置を調節することで、ブレーキ解除位置におけるブレーキアーム63の基準位置を調節することができ、ブレーキ60が利き始めるタイミングを調整することができる。また、ロッド72の上部に装着したバネ受けピン74を位置調節することで、圧縮コイルバネ71の初期圧縮状態を調節することができ、これによって、ブレーキ作動時におけるブレーキパッド70の入力プーリ52aへの押圧力を調整することができる。
図11および図12に示すように、左側の乗降通路12には、踏み込まれた主クラッチペダル58の掛け金具58bに係合する係止レバー75が、支点d周りに前後揺動可能かつ前方へ復帰付勢されて配備され、踏み込まれた主クラッチペダル58を係止レバー75で係止保持して、主クラッチ切り状態を保持することができるようになっている。
また、前記係止レバー75の停止レバー62側の側面には頭付き係止ピン76が備えられている。この頭付き係止ピン76は、停止レバー62の揺動操作経路からは外れているが、図11(ロ)および図12中の仮想線で示すように、片手で停止位置(主クラッチ切りおよびブレーキ作動状態)まで揺動操作した停止レバー62を、そのまま無理に係止レバー75側に弾性変形させて頭付き係止ピン76に下方より係止させることで、この停止レバー62を停止位置に保持しておくことが可能となっている。
さらに、前記停止レバー62の上方露出部分には、主クラッチペダル58の右端部に後方から重複する踏み込み部62aが付設されており、運転座席17に着座した状態で、上記のように頭付き係止ピン76によって停止位置に係止保持されている停止レバー62の踏み込み部62aを踏み込み操作して停止レバー62を更に下方に揺動させると、頭付き係止ピン76から外れた停止レバー62は元の横方向位置に弾性復帰し、この状態で踏み込み部62aの踏み込みを解除すると、停止レバー62は頭付き係止ピン76に干渉することなく初期位置(主クラッチ入りおよびブレーキ解除状態)まで復帰揺動し、これに伴って主クラッチペダル58もクラッチ入り位置に復帰することになる。
エンジンボンネット10横の乗降通路12の外側に配備された予備苗のせ台11は、アーチ形に形成された支柱80を機体側に固定された支持台81に立設し、この支柱80に複数段の苗のせ板82を外向き片持ち状に装備して構成されたものであり、予備苗のせ台11の全体を支柱80における後部支柱80b側の縦軸心eを中心にして約180度後方に回動することで、苗のせ板82の機体横外方への張出しを回避した状態に予備苗のせ台11を格納することができ、機体を車両に積載する場合や、ガレージに格納する場合に便利なものとなっている。特に、左側の予備苗のせ台11を後方へ回動退避させると、停止レバー62の周辺が広く空き、上記のように操作アーム16を利用して地上操縦する場合にレバー操作が容易となる。
なお、前記予備苗のせ台11の支柱80は、その回動軸心である縦軸心eが鉛直に設定されているのに対して、正規の使用姿勢では少しの角度(例えば数度)だけ機体内側に傾斜されており、予備苗のせ台11の全体を後部支柱80bの縦軸心eを中心にして約180度後方に回動すると、支柱80が機体外側に傾斜することになる。これによって、後方に回動した予備苗のせ台11の苗のせ板82が機体内側に大きく入り込んで、シャトルレバー27などに干渉するのを回避している。
予備苗のせ台11の苗のせ板82には、苗すくい板83に載せつけ支持したマット状苗を載置収容することになり、予備苗を苗植付け装置5に補給して残った使用済みの苗すくい板83を最上部の苗のせ板82上に保管しておくように構成されている。つまり、前記支柱80の上部には、アーチ形に屈曲形成された押さえ棒84が支柱前後に亘って支点f周りに上下回動可能に差し込み架設されるとともに、押さえ棒84と後部支柱80bとに亘ってトッグルバネ85が装着され、図19に示すように、押さえ棒84を上方に振り上げた非作用姿勢と苗のせ板82上に載りかかる作用姿勢とにデッドポイントDPを越えて切り換え保持可能に構成されている。従って、予備苗が満載されている時には、押さえ棒84を上方に振り上げた非作用姿勢に切り換え保持しておき、苗補給が行われて最上段の苗のせ板82が空くと、この苗のせ板82上に使用済みの苗すくい板83を置き、図19中の仮想線で示すように、作用姿勢に切り換えた押さえ棒84で苗すくい板83を弾性的に押さえ込み挟持することで、使用済みの苗すくい板83が風などで吹き飛ばされないように回収保管しておくのである。
図15に示すように、予備苗のせ台11の後部支柱80bは、支持台81に立設固定された後部支軸86に縦軸心e周りに回動自在に外嵌されて、セットボルト87によって抜け止め支持されるとともに、前部支柱80aの下端が、支持台81に立設固定された前部支軸88の上端に突き合わせ対向された状態で連結されている。つまり、図16および図17に示すように、前部支柱80aの下端には、機体内側に向けて開放された横断面形状がU形の位置決め金具89が下方に突出して備えられ、この位置決め金具89を前部支軸88に横外側方から嵌合させることで、前部支軸88と前部支柱80aとが同心状に位置決めして上下に突き合わされる。
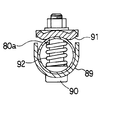
また、前部支柱80aの下部には横向きの支軸90が横スライド自在に貫通装備され、この支軸90の機体内側の突出端に掛け金具91が遊嵌装着されるとともに、支軸90に外嵌装着したバネ92によって掛け金具91が支軸90とともに前部支軸88側に付勢されている。前記掛け金具91にはレバー93が連設されており、位置決め金具89を前部支軸88に横外側方から嵌合させて、前部支軸88と前部支柱80aとを同心状に位置決めして上下に突き合わせた状態でレバー93を支軸90周りに上方に回動することで、掛け金具91を前部支軸88の背部に係止して、前部支柱80aが前部支軸88から横外方に離脱するのが阻止される。なお、前部支軸88の外周面には係止溝94が環状に形成されるとともに、位置決め金具89の内面には係止ピン95が突設されており、前部支柱80aが前部支軸88に突き合わせ連結された状態では、係止溝94に係止ピン95が係合されて、前部支柱80aが前部支軸88に対して上方にも外れないようになっている。
また、レバー93を逆に前方に振出し操作して掛け金具91を前部支軸88から外すことで、予備苗のせ台11の全体を後部の縦軸心e周りに後方に回動させることができる。
なお、後部支軸86には、先に植えた苗列になぞって機体を走行させる場合に使用する苗マーカー100が装備されている。この苗マーカー100は、後部支軸86に固着したブラケット101にマーカーアーム102を縦向きの支点gを中心に揺動可能に連結するとともに、このマーカーアーム102の先端に装着するマーカー棒103を、ゴム製キャップ104ごと上下に貫通させて構成したものであり、ゴム製キャップ104との貫通部の摩擦抵抗によってマーカー棒103を任意の高さにスライドさせて位置保持することができるようになっている。
図18に示すように、前記ブラケット101にはバネ板材からなる係止金具105が片持ち状に設けられており、予備苗のせ台11が後方に約180度回動されると、後部支柱80bの下端近くに固着した縦向きピン106が係止金具105に弾性係合されて、予備苗のせ台11が後方回動状態に保持されるようになっている。
本発明の乗用田植機は以上のように構成されたものであり、作業者が運転座席17に搭乗して運転する通常の作業走行時には、図1ないし図3に示すように、操作アーム16を起立姿勢に切り換え保持するとともに、センターマスコット21を起立させておく。この場合、主クラッチペダル58を踏み込んで主クラッチ57を切り操作しても停止レバー62は残ったままであるので、ブレーキ60が制動操作されることはない。
乗用田植機を圃場への出し入れするための畦越え移動、あるいは、乗用田植機をトラックなどの荷台に積み降ろしする場合など、走行機体3が前後に傾斜して搭乗運転が困難な場合には、主変速レバー25を「超低速」に選択するとともに、副変速レバー24を「低速」に選択し、かつ、アクセル操作によってエンジン出力を適当に高くセットし、高トルクで微速走行できる状態にして走行機体3を自走させながら作業者が地上に降りて操縦することになり、この場合、前輪1を直進状態にして操作アーム16を前方に大きく突出した作用姿勢に切り換える。
例えば、図20に示すように、前上がり傾斜で前進する場合、推進反力で走行機体3の前部が浮き気味になることがあるが、このような場合は、操作アーム16を押し下げ操作して機体前部に下向きの荷重をかけることで機体前部の浮き上がりを抑制することができる。また、路面が悪くて登り難い場合には、操作アーム16を前方に引いて、登坂を補助することができる。また、必要に応じて操作アーム16を左右に押し引きすることで、強制的に機体の方向修正を行うことができる。そして、このような操作において、前輪1は操向牽制機構40によって直進方向に安定保持され、路面の凹凸などによって前輪1が勝手に操向されて思わぬ方向に機体が移動するようなことはない。
また、地上からの操縦中に機体停止を行うには、停止レバー62を押し下げ操作すれば、主クラッチ57が切られるとともに、ブレーキ60が制動操作されて機体は直ちに停止する。この場合、ブレーキ60が先に利くので、主クラッチ57だけが先に切られて、自由になった機体が下方にずり落ちるようなことはない。
そして、機体停止状態を維持したい場合には、停止位置の停止レバー62をそのまま少し横に偏位させて係止レバー75の頭付き係止ピン76に係止保持させればよい。また、停止レバー62の停止位置からの解除は、手動で頭付き係止ピン76から離脱させるか、運転座席17から踏み込み部62aを1回踏み込み操作して戻せばよい。
〔他の実施形態〕
本発明は、以下のような形態で実施することもできる。
(1) 図21に示すように、操作アーム16と操向牽制機構40とを連係するロッド31の先端に、捩じりバネ46の上方延出端46aを受ける座金付きのナット108を装着しておくことで、前記ナット108の位置調節によって、操向牽制機構40が牽制作動を開始する時の操作アーム16の倒伏角度を無段階に調節することができる。また、前記ナット108を大きく後方にずらしておくと、操作アーム16を限界まで倒伏揺動させても操向牽制機構40が機能しない状態をもたらすことも可能となる。
(2) 図22に示すように、前記操向牽制部材42が退避位置から牽制作用位置へ揺動するのを接当阻止するストッパ109を、ソレノイドなどのアクチュエータ110によって紙面表裏方向に出退可能に配備するとともに、このアクチュエータ110を制御装置111に接続し、作業条件によって前記ストッパ109を以下のように出退制御するもよい。つまり、前記制御装置111には、主変速レバー25が「超低速」位置に在るか否かを検出する主変速センサS1 と、副変速レバー24が「低速」位置に在るか否かを検出する副変速センサS2 と、運転座席17の右側に配備されて、苗植付け装置5の昇降と苗植付け装置5への動力伝達を司る植付けレバー112が「植付け」位置に在るか否かを検出する植付けセンサS3 と、運転座席17への着座を検知する座席センサS4 と、左側の予備苗のせ台11が後方に回動されているか否かを検知する予備苗のせ台センサS5 が接続されており、主変速レバー25が「超低速」位置に在り、副変速レバー24が「低速」位置に在り、植付けレバー112が「植付け」位置になく、運転座席17に作業者が着座しておらず、かつ、予備苗のせ台11が後方に回動されている状態、つまり、畦越えや車両積み降ろし移動に適した条件が満たされていることが認識されると、ストッパ109が後退制御されて操向牽制部材42の揺動が可能となり、前記操向牽制機構40が機能する状態がもたらされる。
また、通常の植付け作業状態や道路での移動走行状態では上記条件が満たされなくなるので、前記ストッパ109が突出制御されて、操作アーム16を作用姿勢に倒伏させても、捩じりバネ46だけが捩じり変形されて操向牽制部材42の揺動作動が接当阻止され、もって、前記操向牽制機構40が機能しない状態がもたらされる。
また、前記制御装置111には、ストッパ109を突出作動させて操向牽制機構40の操向牽制機能を解除する牽制解除用スイッチSWが接続されており、操作アーム16が作用姿勢に切り換えられても、操向牽制機構40を作動させない牽制解除状態を任意に現出することが可能となっている。
(3) 図23に示すように、前記操作アーム16が起立姿勢から作用姿勢へ揺動するのを接当阻止するストッパ113をソレノイドなどのアクチュエータ114によって出退可能に配備するとともに、このアクチュエータ114を制御装置111に接続し、作業条件によって前記ストッパ113を以下のように出退制御するもよい。つまり、前例と同様に、前記制御装置111には、主変速センサS1、副変速センサS2 、植付けセンサS3 ,座席センサS4 ,予備苗のせ台センサS5 が接続されており、主変速レバー25が「超低速」位置に在り、副変速レバー24が「低速」位置に在り、植付けレバー112が「植付け」位置になく、運転座席17に作業者が着座しておらず、かつ、予備苗のせ台11が後方に回動されている状態、つまり、畦越えや車両積み降ろし移動に適した条件が満たされていることが認識されると、ストッパ113が退入制御されて、操作アーム16の作用姿勢への切り換え揺動が許容される状態がもたらされる。また、通常の植付け作業状態や道路での移動走行状態では上記条件が満たされていないので、前記ストッパ113が突出制御されて、操作アーム16を作用姿勢に倒伏させることが不能となる。
また、上記条件が満たされた状態で操作アーム16を作用姿勢に倒伏させると、これがポテンショメータからなる倒伏センサS6 で検出され、主変速レバー25の操作経路および副変速レバー24の操作経路のそれぞれに備えたストッパ115,116がソレノイドなどのアクチュエータ117,118によって突出制御され、主変速レバー25が「超低速」位置から増速側に移行されるのを阻止するとともに(中立位置への移行は可能)、副変速レバー24が「低速」位置から高速側に移行されるのを阻止するように構成し、操作アーム16を作用姿勢に倒伏させて地上からの操縦で畦越えや車両への積み降ろしを行っている途中で、不用意に走行変速が超低速状態から高速側に切り換え操作できないようにするもよい。
(4) 操向牽制機構40の作動を解除する手段としては、上記のように操向牽制部材42の作動を接当阻止する手段の他に、前記ピットマンアーム44に備えた突起45をアクチュエータで出退させることも可能である。
(5) 前記操作アーム16としては、機体前端部に起伏揺動可能に装備されたものに限られるものではなく、例えば、図24に示すように、左右の乗降通路12の下側において、前後にスライド出退可能に装備したU字形のものに構成して実施することもできる。この場合、後退した格納姿勢の操作アーム16の前端部を機体前端部のプロテクタに利用することもできる。
(6) 前記操作アーム16を作用姿勢に切り換えた際に作動する操向牽制機構40としては、前輪1を直進状態に安定保持するよう構成する他に、操作アーム16を作用姿勢に切り換えた時点の前輪姿勢に固定あるいは制動をかけるようにしてもよい。
(7) 前記操向牽制機構40としては、操作アーム16を作用姿勢に切り換えた時の前輪1の姿勢を係合固定、弾性保持、あるいは、摩擦保持するよう構成するもよい。
(8) 前記操向牽制機構40としては、ピットマンアーム44に作用させる他に、ステアリングハンドル軸を係合ロック、あるいは摩擦ロックする構造にすることも可能である。