JP4688190B2 - 画像形成装置及びプログラム - Google Patents
画像形成装置及びプログラム Download PDFInfo
- Publication number
- JP4688190B2 JP4688190B2 JP2005302140A JP2005302140A JP4688190B2 JP 4688190 B2 JP4688190 B2 JP 4688190B2 JP 2005302140 A JP2005302140 A JP 2005302140A JP 2005302140 A JP2005302140 A JP 2005302140A JP 4688190 B2 JP4688190 B2 JP 4688190B2
- Authority
- JP
- Japan
- Prior art keywords
- value
- motor
- output
- carriage
- target speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Landscapes
- Character Spaces And Line Spaces In Printers (AREA)
- Ink Jet (AREA)
Description
記録ヘッドを搭載したキャリッジを主走査方向に移動走査させるモータをサーボ制御で駆動するモータ駆動制御手段、を備え、
前記モータ駆動制御手段は、
一定の制御周期で前記モータの現在速度を検出し、前記現在速度と目標速度の差分に基づいて前記モータを駆動するためのモータ出力値を算出する手段と、
算出したモータ出力値と前回のモータ出力値との差分を求め、求めた差分を前回のモータ出力値に加算して今回のモータ出力値として設定する手段と、を有し、
前記設定する手段は、
前記算出したモータ出力値と前回のモータ出力値との差分が、前記キャリッジの停止状態から目標速度までの経過時間毎に対応し、前回のモータ出力値に加算する差分を制限する予め定められた複数の出力制限値のうちの、当該経過時間における前記出力制限値より大きいときには、前記前回のモータ出力値に加算する差分を前記出力制限値に設定し、
前記モータ出力値が、前記目標速度到達直前の出力制限値が設定されている経過時間より前に、ほぼ到達目標速度に達する出力値に達した場合に、当該経過時間より前に設定される出力制限値を前記目標速度到達直前の出力制限値に切り替え、
前記複数の出力制限値の内、前記キャリッジの移動開始直後及び目標速度到達直前の少なくともいずれかの出力制限値は、その他の出力制限値よりも低く定められている
構成とした。
ここで、前記キャリッジの速度が目標速度に到達するまでの時間に応じて前記出力制限値を補正する構成とできる。
この場合、前記出力制限値を補正するための補正値を予め格納した不揮発性の記憶手段を備えている構成とできる。また、画像形成動作に伴う前記キャリッジの実走査に基づいて補正値を修正する構成とできる。
記録ヘッドを搭載したキャリッジを主走査方向に移動走査させるモータをサーボ制御で駆動する処理をコンピュータに実行させるプログラムであって、
一定の制御周期で前記モータの現在速度を検出し、前記現在速度と目標速度の差分に基づいて前記モータを駆動するためのモータ出力値を算出する処理と、
算出したモータ出力値と前回のモータ出力値との差分を求め、求めた差分を前回のモータ出力値に加算して今回のモータ出力値として設定する処理と、をコンピュータに行わせ、
前記今回のモータ出力値として設定する処理では、前記算出したモータ出力値と前回のモータ出力値との差分が、前記キャリッジの停止状態から目標速度までの経過時間毎に対応し、前回のモータ出力値に加算する差分を制限する予め定められた複数の出力制限値のうちの、当該経過時間における前記出力制限値より大きいときには、前記前回のモータ出力値に加算する差分を前記出力制限値に設定し、
前記モータ出力値が、前記目標速度到達直前の出力制限値が設定されている経過時間より前に、ほぼ到達目標速度に達する出力値に達した場合に、当該経過時間より前に設定される出力制限値を前記目標速度到達直前の出力制限値に切り替え、
前記複数の出力制限値の内、前記キャリッジの移動開始直後及び目標速度到達直前の少なくともいずれかの出力制限値は、その他の出力制限値よりも低く定められている
構成とした。
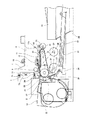
この制御部100は、この装置全体の制御を司るCPU111と、CPU111が実行するプログラム、その他の固定データを格納するROM102と、画像データ等を一時格納するRAM103と、装置の電源が遮断されている間もデータを保持するための書き換え可能な不揮発性メモリ104と、画像データに対する各種信号処理、並び替え等を行う画像処理やその他装置全体を制御するための入出力信号を処理するASIC105とを備えている。なお、この実施形態では、後述するように出力制限値の補正値を予め格納する記憶手段を備える場合、不揮発性メモリ104を用いる。
速度プロファイル格納部201には主走査モータ5の速度プロファイル(加速テーブル目標速度)が格納され、CPU101によって主走査モータ駆動部110に目標速度が与えられる。この速度プロファイル格納部201はROM102にて構成している。

図7のグラフに示すように、キャリッジ4の駆動を行なってリニアエンコーダ74から検出されたキャリッジ速度が目標速度に到達した時に、起動開始時からの経過時間をRAM等の記憶手段に記憶する。
先ず、画像形成装置の製造工程における検査工程において、印刷動作で用いられる複数のキャリッジ目標速度で往復駆動を実施し,目標速度到達までの経過時間の測定を行って、出力制限値の補正を行なう動作を実施する。そして、補正を行う動作実施後、新しく確定した出力制限値の値を装置内の不揮発性のRAMに保存し、その値を装置の出力制限値として出力制限値格納部215に格納し、装置の印刷動作のときには、決定した補正後の出力制限値を元にキャリッジの移動動作を実施する。
5…主走査モータ
11…記録ヘッド
22…被記録媒体(用紙)
31…搬送ベルト
32…搬送ローラ
36…副走査モータ
72…リニアスケール
74…リニアエンコーダ
110…主走査モータ駆動部
201…速度プロファイル格納部
211…比較演算部
212…PID制御演算部
215…出力制限値格納部
Claims (5)
- 記録ヘッドを搭載したキャリッジを主走査方向に移動走査させるモータをサーボ制御で駆動するモータ駆動制御手段、を備え、
前記モータ駆動制御手段は、
一定の制御周期で前記モータの現在速度を検出し、前記現在速度と目標速度の差分に基づいて前記モータを駆動するためのモータ出力値を算出する手段と、
算出したモータ出力値と前回のモータ出力値との差分を求め、求めた差分を前回のモータ出力値に加算して今回のモータ出力値として設定する手段と、を有し、
前記設定する手段は、
前記算出したモータ出力値と前回のモータ出力値との差分が、前記キャリッジの停止状態から目標速度までの経過時間毎に対応し、前回のモータ出力値に加算する差分を制限する予め定められた複数の出力制限値のうちの、当該経過時間における前記出力制限値より大きいときには、前記前回のモータ出力値に加算する差分を前記出力制限値に設定し、
前記モータ出力値が、前記目標速度到達直前の出力制限値が設定されている経過時間より前に、ほぼ到達目標速度に達する出力値に達した場合に、当該経過時間より前に設定される出力制限値を前記目標速度到達直前の出力制限値に切り替え、
前記複数の出力制限値の内、前記キャリッジの移動開始直後及び目標速度到達直前の少なくともいずれかの出力制限値は、その他の出力制限値よりも低く定められている
ことを特徴とする画像形成装置。 - 前記キャリッジの速度が目標速度に到達するまでの時間に応じて前記出力制限値を補正することを特徴とする請求項1に記載の画像形成装置。
- 前記出力制限値を補正するための補正値を予め格納した不揮発性の記憶手段を備えていることを特徴とする請求項2に記載の画像形成装置。
- 画像形成動作に伴う前記キャリッジの実走査に基づいて前記補正値を修正することを特徴とする請求項2又は3に記載の画像形成装置。
- 記録ヘッドを搭載したキャリッジを主走査方向に移動走査させるモータをサーボ制御で駆動する処理をコンピュータに実行させるプログラムであって、
一定の制御周期で前記モータの現在速度を検出し、前記現在速度と目標速度の差分に基づいて前記モータを駆動するためのモータ出力値を算出する処理と、
算出したモータ出力値と前回のモータ出力値との差分を求め、求めた差分を前回のモータ出力値に加算して今回のモータ出力値として設定する処理と、をコンピュータに行わせ、
前記今回のモータ出力値として設定する処理では、前記算出したモータ出力値と前回のモータ出力値との差分が、前記キャリッジの停止状態から目標速度までの経過時間毎に対応し、前回のモータ出力値に加算する差分を制限する予め定められた複数の出力制限値のうちの、当該経過時間における前記出力制限値より大きいときには、前記前回のモータ出力値に加算する差分を前記出力制限値に設定し、
前記モータ出力値が、前記目標速度到達直前の出力制限値が設定されている経過時間より前に、ほぼ到達目標速度に達する出力値に達した場合に、当該経過時間より前に設定される出力制限値を前記目標速度到達直前の出力制限値に切り替え、
前記複数の出力制限値の内、前記キャリッジの移動開始直後及び目標速度到達直前の少なくともいずれかの出力制限値は、その他の出力制限値よりも低く定められている
ことを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005302140A JP4688190B2 (ja) | 2005-10-17 | 2005-10-17 | 画像形成装置及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005302140A JP4688190B2 (ja) | 2005-10-17 | 2005-10-17 | 画像形成装置及びプログラム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2007106088A JP2007106088A (ja) | 2007-04-26 |
| JP2007106088A5 JP2007106088A5 (ja) | 2010-04-02 |
| JP4688190B2 true JP4688190B2 (ja) | 2011-05-25 |
Family
ID=38032325
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005302140A Expired - Fee Related JP4688190B2 (ja) | 2005-10-17 | 2005-10-17 | 画像形成装置及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4688190B2 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016092895A (ja) * | 2014-10-30 | 2016-05-23 | 株式会社リコー | モータ制御装置、駆動装置、画像形成装置、モータ制御方法およびプログラム |
| JP7187974B2 (ja) * | 2018-10-26 | 2022-12-13 | コニカミノルタ株式会社 | 画像形成装置及び搬送制御方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005086941A (ja) * | 2003-09-10 | 2005-03-31 | Ricoh Co Ltd | モータ駆動制御及び画像形成装置 |
-
2005
- 2005-10-17 JP JP2005302140A patent/JP4688190B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005086941A (ja) * | 2003-09-10 | 2005-03-31 | Ricoh Co Ltd | モータ駆動制御及び画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007106088A (ja) | 2007-04-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5396753B2 (ja) | 画像形成装置 | |
| JP2006218682A (ja) | ヘッドデータ転送装置及び画像形成装置 | |
| JP2006213042A (ja) | 画像形成装置 | |
| JP4688190B2 (ja) | 画像形成装置及びプログラム | |
| JP4688187B2 (ja) | 画像形成装置 | |
| JP2007062250A (ja) | 画像形成装置 | |
| JP2007062249A (ja) | 画像形成装置 | |
| JP2007062238A (ja) | 画像形成装置 | |
| JP4398219B2 (ja) | 画像形成装置 | |
| JP2008297091A (ja) | 画像形成装置および画像形成方法 | |
| JP2006240792A (ja) | 画像形成装置 | |
| JP4662821B2 (ja) | モータ駆動制御装置及び画像形成装置、プログラム | |
| JP4732085B2 (ja) | サーボ制御装置及び画像形成装置並びにプログラム | |
| JP2006256080A (ja) | 画像形成装置 | |
| JP2006218667A (ja) | 画像形成方法、画像形成装置及びプリンタドライバ | |
| JP2007062240A (ja) | 画像形成装置 | |
| JP4408769B2 (ja) | 画像形成装置 | |
| JP4355545B2 (ja) | モータ駆動制御及び画像形成装置 | |
| JP4623649B2 (ja) | 画像形成装置 | |
| JP2010188542A (ja) | 画像形成装置および画像形成方法 | |
| JP4632936B2 (ja) | 画像形成装置 | |
| JP2010201869A (ja) | 画像形成装置及びプログラム | |
| JP2006231653A (ja) | 画像形成装置 | |
| JP2006224357A (ja) | 画像形成装置 | |
| JP4233961B2 (ja) | モータ駆動制御及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080725 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100824 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101019 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101116 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110112 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110210 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110211 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4688190 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140225 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |