JP4677945B2 - 車両用走行制御装置 - Google Patents
車両用走行制御装置 Download PDFInfo
- Publication number
- JP4677945B2 JP4677945B2 JP2006119490A JP2006119490A JP4677945B2 JP 4677945 B2 JP4677945 B2 JP 4677945B2 JP 2006119490 A JP2006119490 A JP 2006119490A JP 2006119490 A JP2006119490 A JP 2006119490A JP 4677945 B2 JP4677945 B2 JP 4677945B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- inter
- control device
- vehicle distance
- travel control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images



Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
Landscapes
- Hybrid Electric Vehicles (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
- Controls For Constant Speed Travelling (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
Description
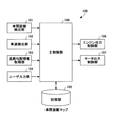
101 車間距離検出部
102 車速検出部
103 道路勾配情報取得部
104 ユーザ入力部
105 記憶部
106 エンジン出力制御部
107 モータ出力制御部
108 主制御部
Claims (7)
- ハイブリッド車に搭載される車両用走行制御装置であって、
自車両と自車両前方を走行中の先行車との車間距離を検出する検出手段と、
前記検出手段により検出された前記車間距離に基づいて、駆動力を発生させる第1の状態と、内燃機関を停止すると共に電気モータの回生を行わず車両を惰性走行させる第2の状態と、を繰り返すことによって、所定の燃費優先の車間距離制御を実現する制御手段と、を有することを特徴とする車両用走行制御装置。 - 請求項1記載の車両用走行制御装置であって、
前記制御手段は、
自車両の車速に応じて最小車間距離を設定し、
前記検出手段により検出された前記車間距離が前記最小車間距離よりも小さくなったとき、駆動力の発生を停止させ、自車両を惰性走行させる、ことを特徴とする車両用走行制御装置。 - 請求項2記載の車両用走行制御装置であって、
自車両が走行中の道路の勾配情報を取得する取得手段を更に有し、
前記制御手段は、前記検出手段により検出された前記車間距離が前記最小車間距離よりも小さくなったときに、自車両が上り勾配を走行中であれば、内燃機関による駆動力の発生のみを停止させる、ことを特徴とする車両用走行制御装置。 - 請求項2記載の車両用走行制御装置であって、
前記制御手段は、
自車両の車速に応じて最大車間距離を設定し、
惰性走行中、前記検出手段により検出された前記車間距離が前記最大車間距離よりも大きくなったとき、駆動力の発生を開始する、ことを特徴とする車両用走行制御装置。 - 請求項4記載の車両用走行制御装置であって、
自車両が走行中の道路の勾配情報を取得する取得手段を更に有し、
前記制御手段は、前記検出手段により検出された前記車間距離が前記最大車間距離よりも大きくなったときに、自車両が下り勾配を走行中であれば、駆動力の発生を開始せず、自車両を惰性走行させる、ことを特徴とする車両用走行制御装置。 - 請求項1乃至5のいずれか一項記載の車両用走行制御装置であって、
前記制御手段は、前記所定の燃費優先の車間距離制御中、内燃機関以外の駆動力発生源のみによって駆動力が生成される車速領域を拡張する、ことを特徴とする車両用走行制御装置。 - 請求項1乃至6のいずれか一項記載の車両用走行制御装置であって、
前記制御手段は、自車両運転者により前記所定の燃費優先の車間距離制御の実行が指示された場合であっても、前記検出手段により先行車が検出されない場合には前記所定の燃費優先の車間距離制御を実行しない、ことを特徴とする車両用走行制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006119490A JP4677945B2 (ja) | 2006-04-24 | 2006-04-24 | 車両用走行制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006119490A JP4677945B2 (ja) | 2006-04-24 | 2006-04-24 | 車両用走行制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007291919A JP2007291919A (ja) | 2007-11-08 |
| JP4677945B2 true JP4677945B2 (ja) | 2011-04-27 |
Family
ID=38762785
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006119490A Active JP4677945B2 (ja) | 2006-04-24 | 2006-04-24 | 車両用走行制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4677945B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4219260A1 (en) | 2022-01-27 | 2023-08-02 | Toyota Jidosha Kabushiki Kaisha | Vehicle driving assistance apparatus, vehicle driving assistance method, and computer-readable storage medium storing vehicle driving assistance program |
| DE102023120597A1 (de) | 2022-10-19 | 2024-04-25 | Toyota Jidosha Kabushiki Kaisha | Fahrzeugbewegungssteuerungsvorrichtung, Fahrzeugbewegungssteuerungsverfahren und computerlesbares Speichermedium, das ein Fahrzeugbewegungssteuerungsprogramm speichert |
Families Citing this family (35)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR100906870B1 (ko) | 2007-12-13 | 2009-07-08 | 현대자동차주식회사 | 적응형 크루즈 컨트롤 시스템이 구비된 하이브리드 차량의제어 방법 |
| JP4596016B2 (ja) | 2008-02-12 | 2010-12-08 | トヨタ自動車株式会社 | 車輌走行制御装置 |
| JP5106171B2 (ja) * | 2008-02-21 | 2012-12-26 | 本田技研工業株式会社 | 車両用走行制御装置 |
| JP5521340B2 (ja) * | 2009-02-06 | 2014-06-11 | 日産自動車株式会社 | ハイブリッド車両の制御装置 |
| JP5304350B2 (ja) * | 2009-03-12 | 2013-10-02 | トヨタ自動車株式会社 | 車両用制御装置 |
| US8483949B2 (en) | 2009-04-13 | 2013-07-09 | Toyota Jidosha Kabushiki Kaisha | Running pattern calculating apparatus and running pattern calculating method |
| JP4716340B2 (ja) * | 2009-06-25 | 2011-07-06 | 渡邉 雅弘 | 車両走行制御方法 |
| DE112009005499B4 (de) | 2009-10-22 | 2021-06-17 | Toyota Jidosha Kabushiki Kaisha | Fahrsteuerung für ein Hybridfahrzeug |
| US20120330505A1 (en) | 2010-01-29 | 2012-12-27 | Toyota Jidosha Kabushiki Kaisha | Vehicle control device |
| CN102892655B (zh) * | 2010-05-13 | 2015-08-26 | 丰田自动车株式会社 | 车辆控制装置和车辆控制系统 |
| JP5035431B2 (ja) | 2010-05-19 | 2012-09-26 | トヨタ自動車株式会社 | 車両制御システム |
| CN103748379B (zh) | 2011-08-24 | 2016-06-22 | 丰田自动车株式会社 | 车辆用行驶控制装置 |
| JPWO2013046310A1 (ja) * | 2011-09-27 | 2015-03-26 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| CN103826900A (zh) * | 2011-09-27 | 2014-05-28 | 丰田自动车株式会社 | 车辆和车辆的控制方法 |
| JP2013086725A (ja) * | 2011-10-20 | 2013-05-13 | Toyota Motor Corp | 車両および車両の制御方法 |
| JP5765192B2 (ja) * | 2011-11-04 | 2015-08-19 | トヨタ自動車株式会社 | 車両および車両の制御方法 |
| CN104024021B (zh) * | 2012-01-02 | 2017-09-12 | 沃尔沃拉斯特瓦格纳公司 | 用于控制行驶距离的方法和系统 |
| JP5751192B2 (ja) * | 2012-02-22 | 2015-07-22 | トヨタ自動車株式会社 | ハイブリッド自動車 |
| JP6367516B2 (ja) * | 2012-10-19 | 2018-08-01 | トヨタ自動車株式会社 | 車両の走行制御装置 |
| JP5915496B2 (ja) * | 2012-10-19 | 2016-05-11 | トヨタ自動車株式会社 | 車両の走行制御装置 |
| GB2508668A (en) | 2012-12-10 | 2014-06-11 | Jaguar Land Rover Ltd | Adaptive cruise control (ACC) means for a host vehicle having regenerative and non-regenerative braking means |
| JP6370388B2 (ja) * | 2014-09-19 | 2018-08-08 | 日立オートモティブシステムズ株式会社 | 車両制御装置及び車両制御方法 |
| JP6323387B2 (ja) | 2015-04-21 | 2018-05-16 | 株式会社デンソー | 走行制御装置 |
| JP6437891B2 (ja) * | 2015-07-03 | 2018-12-12 | 日立オートモティブシステムズ株式会社 | 自動車の制御装置 |
| JP2017024637A (ja) * | 2015-07-24 | 2017-02-02 | トヨタ自動車株式会社 | 車両制御装置 |
| KR20170107245A (ko) | 2016-03-15 | 2017-09-25 | 현대자동차주식회사 | Ssc-크루즈 시스템의 주행제어방법 및 장치 |
| KR101836675B1 (ko) | 2016-07-29 | 2018-04-20 | 현대자동차주식회사 | 자동차 타력주행 제어방법 |
| JP2018034600A (ja) * | 2016-08-30 | 2018-03-08 | マツダ株式会社 | 車両の制御装置 |
| JP2018034597A (ja) * | 2016-08-30 | 2018-03-08 | マツダ株式会社 | 車両の制御装置 |
| KR102483014B1 (ko) * | 2016-09-21 | 2022-12-30 | 현대모비스 주식회사 | 타력감속도 추정을 통한 제동 제어 방법 |
| JP2019031153A (ja) * | 2017-08-07 | 2019-02-28 | いすゞ自動車株式会社 | 走行制御装置、車両および走行制御方法 |
| JP6760331B2 (ja) | 2017-11-17 | 2020-09-23 | 株式会社デンソー | 車両制御装置 |
| JP7373265B2 (ja) | 2018-01-29 | 2023-11-02 | 株式会社デンソー | 制御装置 |
| JP7056335B2 (ja) * | 2018-04-09 | 2022-04-19 | 株式会社デンソー | 走行制御装置 |
| CN111273673A (zh) * | 2020-03-09 | 2020-06-12 | 新石器慧通(北京)科技有限公司 | 一种无人车的自动驾驶跟随方法、系统及无人车 |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5622113A (en) * | 1979-07-31 | 1981-03-02 | Nippon Denso Co Ltd | Method and device for running control of car |
| JPH05213093A (ja) * | 1992-02-04 | 1993-08-24 | Toyota Motor Corp | 車両用走行制御装置 |
| JPH112143A (ja) * | 1997-06-11 | 1999-01-06 | Aqueous Res:Kk | 車両用制御装置 |
| JPH11348599A (ja) * | 1998-06-12 | 1999-12-21 | Mitsubishi Motors Corp | 車両の走行制御装置 |
| JP2000224713A (ja) * | 1999-02-03 | 2000-08-11 | Toyota Motor Corp | ハイブリッド車両及びその制御方法 |
| JP2001018680A (ja) * | 1999-07-02 | 2001-01-23 | Toyota Motor Corp | 車両走行制御装置 |
| JP2003329123A (ja) * | 2002-05-13 | 2003-11-19 | Denso Corp | 車両制御装置 |
| JP2004245099A (ja) * | 2003-02-13 | 2004-09-02 | Nissan Motor Co Ltd | エンジン自動停止装置 |
| JP2005185055A (ja) * | 2003-12-22 | 2005-07-07 | Nissan Motor Co Ltd | ハイブリット車両制御装置 |
-
2006
- 2006-04-24 JP JP2006119490A patent/JP4677945B2/ja active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5622113A (en) * | 1979-07-31 | 1981-03-02 | Nippon Denso Co Ltd | Method and device for running control of car |
| JPH05213093A (ja) * | 1992-02-04 | 1993-08-24 | Toyota Motor Corp | 車両用走行制御装置 |
| JPH112143A (ja) * | 1997-06-11 | 1999-01-06 | Aqueous Res:Kk | 車両用制御装置 |
| JPH11348599A (ja) * | 1998-06-12 | 1999-12-21 | Mitsubishi Motors Corp | 車両の走行制御装置 |
| JP2000224713A (ja) * | 1999-02-03 | 2000-08-11 | Toyota Motor Corp | ハイブリッド車両及びその制御方法 |
| JP2001018680A (ja) * | 1999-07-02 | 2001-01-23 | Toyota Motor Corp | 車両走行制御装置 |
| JP2003329123A (ja) * | 2002-05-13 | 2003-11-19 | Denso Corp | 車両制御装置 |
| JP2004245099A (ja) * | 2003-02-13 | 2004-09-02 | Nissan Motor Co Ltd | エンジン自動停止装置 |
| JP2005185055A (ja) * | 2003-12-22 | 2005-07-07 | Nissan Motor Co Ltd | ハイブリット車両制御装置 |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP4219260A1 (en) | 2022-01-27 | 2023-08-02 | Toyota Jidosha Kabushiki Kaisha | Vehicle driving assistance apparatus, vehicle driving assistance method, and computer-readable storage medium storing vehicle driving assistance program |
| KR20230115904A (ko) | 2022-01-27 | 2023-08-03 | 도요타지도샤가부시키가이샤 | 차량 운전 지원 장치 |
| DE102023120597A1 (de) | 2022-10-19 | 2024-04-25 | Toyota Jidosha Kabushiki Kaisha | Fahrzeugbewegungssteuerungsvorrichtung, Fahrzeugbewegungssteuerungsverfahren und computerlesbares Speichermedium, das ein Fahrzeugbewegungssteuerungsprogramm speichert |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2007291919A (ja) | 2007-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4677945B2 (ja) | 車両用走行制御装置 | |
| JP5369504B2 (ja) | 車両用走行制御装置 | |
| CN108349371B (zh) | 用于控制混合动力车辆中的内燃机的控制系统和方法 | |
| CN108025750B (zh) | 车辆控制装置 | |
| US8452514B2 (en) | Device for executing preceding vehicle following driving control | |
| JP2007187090A (ja) | 速度維持制御装置 | |
| CN108025735B (zh) | 车辆控制装置 | |
| JP5287290B2 (ja) | 車両用走行制御装置 | |
| KR20200066114A (ko) | 차량 상대 속도를 이용하여 차량에서 엔진 아이들 세일링을 제어하는 방법 및 시스템 | |
| JP2011005920A (ja) | 車両走行制御方法 | |
| JP2018122799A (ja) | 走行制御装置、車両および走行制御方法 | |
| JP4821879B2 (ja) | 走行軌跡演算装置、および、走行軌跡演算方法 | |
| JP2024051012A (ja) | 車両運転支援装置 | |
| JP2018135003A (ja) | 走行制御装置、車両および走行制御方法 | |
| JP4971094B2 (ja) | 車両用走行制御装置 | |
| JP2017137053A (ja) | ハイブリッド自動車の制御装置 | |
| JP4586779B2 (ja) | 運転支援装置 | |
| JP5652337B2 (ja) | 車両制御装置 | |
| JP2016137835A (ja) | 車両用走行制御装置 | |
| JP2018127095A (ja) | 走行制御装置、車両および走行制御方法 | |
| JP2019034633A (ja) | 走行制御装置、車両および走行制御方法 | |
| JP2018158642A (ja) | 走行制御装置、車両および走行制御方法 | |
| JP6958082B2 (ja) | 走行制御装置、車両および走行制御方法 | |
| JP2016113097A (ja) | 車両制御装置および車両制御プログラム | |
| JP7471248B2 (ja) | 車両制御装置および車両制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081001 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20100528 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100601 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100709 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20101115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20101115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110104 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110117 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4677945 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140210 Year of fee payment: 3 |