JP4279449B2 - リソグラフィ投影装置に使うための平衡位置決めシステム - Google Patents
リソグラフィ投影装置に使うための平衡位置決めシステム Download PDFInfo
- Publication number
- JP4279449B2 JP4279449B2 JP2000404376A JP2000404376A JP4279449B2 JP 4279449 B2 JP4279449 B2 JP 4279449B2 JP 2000404376 A JP2000404376 A JP 2000404376A JP 2000404376 A JP2000404376 A JP 2000404376A JP 4279449 B2 JP4279449 B2 JP 4279449B2
- Authority
- JP
- Japan
- Prior art keywords
- masses
- object table
- balanced
- equilibrium
- projection apparatus
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images







Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70766—Reaction force control means, e.g. countermass
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/02—Manufacture or treatment of semiconductor devices or of parts thereof
- H01L21/027—Making masks on semiconductor bodies for further photolithographic processing not provided for in group H01L21/18 or H01L21/34
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/70691—Handling of masks or workpieces
- G03F7/70716—Stages
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03F—PHOTOMECHANICAL PRODUCTION OF TEXTURED OR PATTERNED SURFACES, e.g. FOR PRINTING, FOR PROCESSING OF SEMICONDUCTOR DEVICES; MATERIALS THEREFOR; ORIGINALS THEREFOR; APPARATUS SPECIALLY ADAPTED THEREFOR
- G03F7/00—Photomechanical, e.g. photolithographic, production of textured or patterned surfaces, e.g. printing surfaces; Materials therefor, e.g. comprising photoresists; Apparatus specially adapted therefor
- G03F7/70—Microphotolithographic exposure; Apparatus therefor
- G03F7/708—Construction of apparatus, e.g. environment aspects, hygiene aspects or materials
- G03F7/70858—Environment aspects, e.g. pressure of beam-path gas, temperature
- G03F7/709—Vibration, e.g. vibration detection, compensation, suppression or isolation
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Engineering & Computer Science (AREA)
- Epidemiology (AREA)
- Life Sciences & Earth Sciences (AREA)
- Atmospheric Sciences (AREA)
- Toxicology (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Environmental & Geological Engineering (AREA)
- Chemical & Material Sciences (AREA)
- Public Health (AREA)
- Manufacturing & Machinery (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Exposure And Positioning Against Photoresist Photosensitive Materials (AREA)
- Exposure Of Semiconductors, Excluding Electron Or Ion Beam Exposure (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Vibration Prevention Devices (AREA)
Description
【発明の属する技術分野】
本発明は、平衡位置決めシステムに関する。更に詳しくは、この発明は、リソグラフィ投影装置であって:
放射線の投影ビームを供給するための放射線システム;
マスクを保持するための第1物体テーブル;
基板を保持するるための第2物体テーブル;および
このマスクの被照射部分をこの基板の目標部分上に結像するための投影システムを含む投影装置でそのようなシステムを使用することに関する。
【0002】
【従来の技術】
簡単のために、この投影システムを、以後“レンズ”と呼ぶかも知れないが;この用語は、例えば、屈折性光学素子、反射性光学素子、反射屈折性光学素子および電荷粒子光学素子を含む、種々の型式の投影システムを包含するように広く解釈すべきである。この放射線システムもこの放射線の投影ビームを指向し、成形しまたは制御するためにこれらの設計形式の何れかに従って作用する部品を含んでもよく、そのような部品も以下で集合的または単独に“レンズ”と呼ぶこともある。その上、この第1および第2物体テーブルを、それぞれ、“マスクテーブル”および“基板テーブル”と呼ぶかも知れない。更に、このリソグラフィ装置は、二つ以上のマスクテーブルおよび/または二つ以上の基板テーブルを有する形式でもよい。そのような“多段ステージ”装置では、追加のテーブルを並列に使ってもよく、または準備工程を一つ以上のステージで行い、一方一つ以上の他のステージを露出に使ってもよい。ツインステージ・リソグラフィ装置は、例えば、国際特許出願WO98/28665およびWO98/40791に記載してある。
【0003】
リソグラフィ投影装置は、例えば、集積回路(IC)の製造に使うことができる。そのような場合、マスク(レチクル)がこのICの個々の層に対応する回路パターンを含んでもよく、このパターンを、感光材料(レジスト)の層で塗被した基板(シリコンウエハ)の目標部分(一つ以上のダイを含む)上に結像することができる。一般的に、単一ウエハが隣接するダイの全ネットワークを含み、それらをこのマスクを介して、一度に一つずつ、順次照射する。一つの型式のリソグラフィ投影装置では、全マスクパターンをこの目標部分上に一度に露出することによって各目標部分を照射し;そのような装置を普通ウエハステッパと呼ぶ。代替装置 ― 普通ステップ・アンド・スキャン装置と呼ぶ ― では、このマスクパターンを投影ビームの下で与えられた基準方向(“走査”方向)に順次走査し、一方、一般的に、この投影システムが倍率M(一般的に<1)であり、この基板テーブルを走査する速度Vが、倍率M掛けるマスクテーブルを走査する速度であるので、この基板テーブルをこの方向に平行または逆平行に同期して走査することによって各目標部分を照射する。ここに説明したようなリソグラフィ装置に関する更なる情報は、国際特許出願WO97/33205から収集することができる。
【0004】
リソグラフィ装置では、マスク(レチクル)および基板(ウエハ)をナノメータ精度に位置決めするために使う加速力に対する機械フレーム上の反力が、この装置の精度を損う振動の主な原因である。振動の影響を最小にするために、絶縁した測定フレームを設けて、その上に全ての位置検知装置を取付け、全ての反力を、この装置の残りから隔離した、所謂力または反力フレームへ伝えることが可能である。
【0005】
US5,208,497は、駆動力の反力を、通常被駆動質量より重く且つこの装置の残りに対して自由に動ける平衡質量へ伝えるシステムを記載する。この反力は、この平衡質量の加速に消費し、この装置の残りにそれ程影響しない。しかし、US5,208,497に開示する概念は、一方向の反力に対してだけ有効で、多自由度のシステムには容易には拡張できない。平面内で3自由度で動き得る平衡質量は、WO98/40791およびWO98/28665(上記)に記載してある。
【0006】
EP−A−0,557,100は、反力が等しく且つ反対であり、それで相殺するように、二つの質量を反対方向に能動的に駆動することに頼るシステムを記述する。記載してあるこのシステムは、2次元で動作するが、この平衡質量の能動的位置決めが主物体を駆動するものと同じ品質および性能の第2の位置決めシステムを必要とする。
【0007】
上記のシステムのどれも、被駆動質量の回転位置の調整によって、または被駆動物体に加える力の作用線とその質量中心の間の整列不良のために生ずるかも知れない偏揺れモーメントを相殺するのに特に有効ではない。
【0008】
US5,815,246は、XY平面で自由に動ける、即ち、XおよびY方向に並進し且つZ方向に平行な軸周りに回転できる、第1平衡質量を有する位置決めシステムを開示する。この第1平衡質量の回転を制御するために、第2平衡質量を形成するフライホイールを、この第1平衡質量に取付けた回転モータによって駆動して反作用トルクを働かせる。従って、この第1平衡質量の制御回転は、この回転およびこのフライホイールの正確な制御を要する。この制御の遅延またはフライホイールのバランス不良は、振動を起すだろう。
【0009】
【発明が解決しようとする課題】
本発明の目的は、被駆動質量の偏揺れモーメントを打消すための、および好ましくは、少なくとも二つの並進自由度で力平衡化もするための平衡位置決めシステムを提供することである。
【0010】
【課題を解決するための手段】
本発明によれば、リソグラフィ投影装置であって:
放射線の投影ビームを供給するための放射線システム;
マスクを保持するための第1物体テーブル;
基板を保持するるための第2物体テーブル;
このマスクの被照射部分をこの基板の目標部分上に結像するための投影システム;
上記物体テーブルの少なくとも一つを位置決めするための平衡位置決めシステムをさらに有し、該システムは、
第1平衡質量および第2平衡質量;
上記第1および第2平衡質量を少なくとも一つの方向に実質的に自由に並進できるように支持するための軸受手段;および
上記一つの物体テーブルと上記第1および第2平衡質量との間に直接作用して上記物体テーブルを上記一つの方向と垂直な軸周りに回転するための駆動手段で、上記物体テーブルの上記回転を行わせるために上記第1および第2平衡質量に互いに反対方向に線形力を働かせるように構成した駆動手段;を含むことに特徴があるシステム;
を含投影装置が提供される。
【0011】
【発明の実施の形態】
少なくとも一つの方向に並進できる二つの平衡質量を設けることによって、この物体テーブルの回転位置を調整するために、または他の駆動力が誘起したトルクを補償するために必要なトルクを、この物体テーブルと二つの平衡質量の間に作用する二つの直線的に作用する力の和として提供することができる。これら二つの平衡質量の反力は、それらを直線的に動かし、それらを容易に吸収することができる。言換えれば、被駆動物体テーブルに働くトルクに対する反力を二つの平衡質量の並進に変換し、平衡質量の回転運動が何も起らない。もし、物体テーブルの回転運動を直線運動と組合わせれば、各平衡質量に作用する正味力は、大きさは違うが同じ方向かも知れないことが分るだろう。
【0012】
この発明のその上更なる態様によれば、リソグラフィ投影装置で:
放射線の投影ビームを供給するための放射線システム;
マスクを保持するための第1物体テーブル;
基板を保持するための第2物体テーブル;および
このマスクの被照射部分をこの基板の目標部分上に結像するための投影システム;を含む投影装置を使うデバイスの製造方法において:
パターンを坦持するマスクを上記第1物体テーブルに用意する工程;
放射線感応層を備える基板を上記第2物体テーブルに用意する工程;
このマスクの部分を照射し、上記基板の上記目標部分上に照射部分を結像する工程を含む方法に於いて:
上記物体テーブルの少なくとも一つを、少なくとも一つの方向に自由に動ける第1および第2平衡質量並びに上記一つの物体テーブルと上記平衡質量の間に作用する駆動手段を含む位置決めシステムを使って位置決めし;並びに
上記照射工程中またはその前に、上記一つの物体テーブルをそれと上記第1および第2平衡質量の間に互いに反対に向いた力を加えることによって回転することを特徴とする方法が提供される。
【0013】
この発明によるリソグラフィ投影装置を使う製造プロセスでは、マスクの中のパターンを、少なくとも部分的にエネルギー感応材料(レジスト)の層で覆われた基板上に結像する。この結像工程の前に、この基板は、例えば、下塗り、レジスト塗布およびベークのような、種々の処理を受けるかも知れない。露出後、基板は、例えば、露出後ベーク(PEB)、現像、ハードベークおよび結像形態の測定/検査のような、他の処理を受けるかも知れない。この一連の処理は、デバイス、例えばICの個々の層をパターン化するための基礎として使用する。そのようにパターン化した層は、次に、エッチング、イオン注入(ドーピング)、金属化処理、酸化処理、化学・機械的研磨等のような、全て個々の層の仕上げを意図した種々の処理を受けるかも知れない。もし、幾つかの層が必要ならば、全処理またはその変形を各新しい層に反復しなければならないだろう。結局、デバイスのアレイが基板(ウエハ)上にできる。次に、これらのデバイスをダイシングまたは鋸引のような手法によって互いから分離し、そこから個々のデバイスをキャリヤに取付け、ピンに接続し等できる。そのようなプロセスに関する更なる情報は、例えば、ピータ・バン・ザントの“マイクロチップの製作:半導体加工の実用ガイド”、第3版、マグロウヒル出版社、1997年、ISBN0-07-067250-4という本から得ることができる。
【0014】
この明細書でICの製造に於けるこの発明による装置の使用を具体的に参照してもよいが、そのような装置は、他の多くの可能な用途があることを明確に理解すべきである。例えば、それを集積光学システム、磁区メモリ用誘導検出パターン、液晶ディスプレイパネル、薄膜磁気ヘッド等の製造に使ってもよい。当業者は、そのような代替用途の関係では、この明細書で使う“レチクル”、“ウエハ”または“ダイ”という用語のどれも、それぞれ、より一般的な用語“マスク”、“基板”および“目標部分”で置換えられると考えるべきであることが分るだろう。
【0015】
本文書では、“照明放射線”および“ビーム”という用語を紫外放射線(例えば、365nm、248nm、193nm、157nmまたは126nmの波長の)、EUV、X線、電子およびイオンを含むあらゆる種類の電磁放射線または粒子フラックスを包含するために使用できるが、それらに限定されるものでない。
【0016】
本発明の実施例を以下に、軸をX、YおよびZで表すデカルト座標系を参照して説明し、このXY平面は称呼基板およびレチクル面と平衡である。Riという表記を使ってI方向に平行な軸周りの回転を表す。
【0017】
本発明を以下に実施例および添付の概略図を参照して説明する。これらの図面で、類似の参照数字は、類似の部品を指す。
【0018】
【実施例1】
図1は、この発明によるリソグラフィ投影装置を概略的に示す。この装置は:
放射線(例えば、UV若しくはEUV線、x線、電子またはイオン)の投影ビームPBを供給するための放射線システムLA、IL;
マスクMA(例えば、レチクル)を保持するためのマスクホルダを備え、このマスクを部材PLに関して正確に位置決めするための第1位置決め手段に結合された第1物体テーブル(マスクテーブル)MT;
基板W(例えば、レジストを塗被したシリコンウエハ)を保持するための基板ホルダを備え、この基板を部材PLに関して正確に位置決めするための第2位置決め手段に結合された第2物体テーブル(基板テーブル)WT;
このマスクMAの被照射部分を基板Wの目標部分C上に結像するための投影システム(“レンズ”)PL(例えば、屈折若しくは反射屈折性のシステム、ミラーグループまたは視界偏向器アレイ);
を含む。
ここに描くように、この装置は、透過型である(即ち、透過性のマスクを有する)。
しかし、一般的に、それは、例えば、反射型でもよい。
【0019】
この放射線システムは、放射線のビームを作る放射源LA(例えば、Hgランプ、エキシマレーザ、放電プラズマ源、貯蔵リング若しくはシンクロトロンの電子ビームの経路の周りに設けたアンジュレータ、または電子若しくはイオンビーム源)を含む。このビームをこの照明システムILに含まれる種々の光学部品、−例えば、ビーム成形光学系Ex、積分器INおよびコンデンサCO−に通して得られたビームが所望の形状および強度分布を有するようにする。
【0020】
ビームPBは、次に、マスクテーブルMT上に保持されたマスクMAを横切る。マスクMAを通過してから、ビームPBは、レンズPLを通過し、それがこのビームを基板Wの目標部分C上に集束する。干渉計変位測定手段IFの助けをかりて、基板テーブルWTは、例えば、異なる目標部分CをビームPBの経路に配置するように、正確に動かされることができる。同様に、例えば、マスクMAをマスクライブラリから機械的に検索してから、この第1位置決め手段を使ってマスクMAをビームPBの経路に関して正確に配置することができる。一般的に、物体テーブルMT、WTの運動は、図1にはっきりは示さないが、長ストロークモジュール(粗位置決め)および短ストロークモジュール(微細位置決め)の助けをかりて実現できる。
図示する装置は、二つの異なるモードで使うことができる:
1.ステップモードでは、マスクテーブルMTを本質的に固定して保持し、全マスク像を目標部分C上に一度に(即ち、単一“フラッシュ”で)投影する。次に基板テーブルWTをXおよび/またはY方向に移動して異なる目標部分CをビームPBで照射できるようにする;
2.走査モードでは、与えられた目標部分Cを単一“フラッシュ”では露出しないことを除いて、本質的に同じシナリオを適用する。その代りに、マスクテーブルMTが与えられた方向(所謂“走査方向”、例えば、Y方向)に速度vで動き得て、それで投影ビームPBがマスク像の上を走査させられ;同時に、基板テーブルWTがそれと共に同じまたは反対方向に速度V=Mvで動かされ、このMはレンズPLの倍率(典型的には、M=1/4または1/5)である。この様にして、比較的大きい目標部分Cを、解像度について妥協する必要なく、露出できる。
【0021】
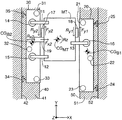
図2および図3は、この発明の第1実施例のレチクル(マスク)ステージを詳細に示す。そのパターンをウエハ上に結像すべきマスク(MA)(図2には示さず)をマスクテーブルMT上に保持する。この装置の走査モードに適合するためには、このマスクをY方向に比較的広範囲の運動(ストローク)に亘って正確に位置決めしなければならないが、他の自由度では、遙かに小さい運動範囲に亘るだけでよい。この大きなY方向ストローク、並びにより限られたX方向ストロークおよび幾らかのRz運動は、以下に説明する長ストローク(粗位置決め)モジュールによって行う。6自由度全ての微細位置決めは、マスクテーブルに含まれる短ストローク位置アクチュエータによって達成する。
【0022】
図2および図3に示すマスクテーブルMTは、透過性マスクに使うことを意図し、それはその上下の空間を空けておかねばならないことを意味する。従って、マスクテーブルMTを、Y方向に伸びる空いた空間の両側に位置する二つの平衡質量20、30から支持する。本実施例では、マスクテーブルMTから横に伸びる3本のビーム11、12、13をこの目的で設けるが、これらのビームは、その代りにマスクテーブルMTの本体と一体に作るとか、マスクテーブルそれ自体が平衡質量20、30の上に延在するようにしてもよい。平衡質量20、30の上面は、平行平面で、それに対して、ビーム11、12、13の端に設けたテーブル軸受14、15、16がマスクテーブルを支持するように作用する。テーブル軸受14、15、16は、マスクテーブルMTを実質的に無摩擦で、平衡質量20、30に対してXY平面で動けるようにする。テーブル軸受14、15、16は、例えば、気体軸受でもよい。Z、RxおよびRyの粗位置決めのために、Z方向アクチュエータもこれら三つの軸受に含めてもよい。
【0023】
平衡質量20、30は、実質的に無摩擦のZ軸受21、22、23、31、32、33によってY方向に伸びる平行レール40、50上に支持し、それらのレールは、この主機械フレーム、またはベースプレート、BPの一部であるかまたはそれに結合してもよい。レール40、50は、実質的に平坦な水平上面を有し、それに対してZ軸受21、22、23、31、32、33が作用して平衡質量20、30が比較的広運動範囲に亘ってY方向に自由に動けるようにする。Z軸受21、22、23、31、32、33は、Z方向に柔軟、即ち、低剛性であってもよく、それで平衡質量20、30は、遙かに小さい運動範囲に亘ってであるが、Z方向にも実質的に自由に動ける。これらの平衡質量がX方向に動く自由は、レール40、50の実質的に平面の垂直壁42、52に対して作用する柔軟なX軸受24、25、34、35によって同様にもたらしてもよい。X軸受24、25、34、35は、両方向に力を働かせるために、予荷重を掛けたまたは対向パッドの軸受でもよい。Z軸受21、22、23、31、32、33およびX軸受24、25、34、35は、例えば、気体軸受でもよい。平衡質量20、30は、この様に三つの並進自由度全てに自由に動け、それでマスクテーブルにこれらの方向で平衡化をもたらす。RxおよびRyの回転平衡化は、Z軸受21、22、23、31、32、33が独立に動き得て、離間しているので与えられる。Ry運動に対する平衡化は、以下に議論するように、二つの平衡質量20、30を差動駆動することによって与えられる。
【0024】
もし、このマスクテーブルのY並進以外の自由度の運動範囲が、本実施例の場合のように、小さければ、平衡質量の必要な運動の自由も、板ばね装置、柔軟な軸受または質量補償器と組合わせたその他の剛い軸受によって適応できる。他の自由度の幾つかまたは全ての反力が平衡質量の一つに伝えられるだけにして、その平衡質量だけが関連する自由度で制御したコンプライアンスで支持することのみが必要であるように構成することも可能である。
【0025】
他の自由度での軸受または支持体の剛性および平衡質量の質量が低域通過フィルタとして作用する質量・ばねシステムを形成し、即ち、低振動数力だけが機械フレームに伝わる。もし、この質量・ばねシステムの固有振動数がこの作動力の基本振動数よりかなり、例えば、5ないし10倍、低ければ、反力の有意な減衰を達成できる。
【0026】
以下に説明するように、マスクテーブルMTを平衡質量20、30に作用するアクチュエータによって駆動し、それらがこのマスクテーブルと反対方向に加速するようにする。これらの平衡質量およびマスクテーブルMTの加速の大きさは、それらの質量に比例し、それでこれらの平衡質量およびマスクテーブルの運動範囲は、それらの質量比内にある筈である。平衡質量20、30がマスクテーブルMTの所望の運動範囲に適合するために用意しなければならない運動範囲を減らすためには、平衡質量20、30をマスクテーブルMTの質量より相対的に重く、例えば、各々2ないし10倍に作る。平衡質量20、30およびマスクテーブルMTの質量中心は、縦揺れまたは横揺れモーメントを最小にするために、Z方向に出来るだけ近い、例えば、100mm未満であるのが好ましい。
【0027】
本実施例では、マスクテーブルMTを、それと平衡質量20の間に作用するY1駆動装置18およびそれと平衡質量30の間に作用するY2駆動装置17によってY方向に駆動する。Y1およびY2駆動装置17、18は、例えば、アーマチュアをこのマスクテーブルに取付け、細長いステータをそれぞれの平衡質量に取付けたリニアモータを含んでもよい。作動する際、Yi駆動装置がマスクテーブルMTに力Fyiを加え、および同等且つ反対の反力yiをそれぞれの平衡質量に加える。
【0028】
X方向の位置決めは、平衡質量30に作用する単一Xアクチュエータ19によって行う。Xアクチュエータ19も、アーマチュアをこのマスクテーブルに取付け、ステータをこの平衡質量に取付けたリニアモータでもよく、またはY方向に自由に変位する細長いボイスコイルモータ、若しくはYZ平面に平行な面を圧迫する空気静圧軸受に結合した円筒形ボイスコイルモータでもよい。マスクテーブルMTと平衡質量30の相対Y位置がどうであろうと、このマスクテーブルをX方向に駆動するためには、もしXアクチュエータがリニアモータであれば、そのステータがこの平衡質量とマスクテーブルのY方向の組合わせた運動範囲全体に拡がらなければならない。Xアクチュエータ19の作用線は、Rzモーメントの発生を最小にするように、マスクテーブルMTの質量中心CGMTのY位置を通過するように構成するのが好ましい。
【0029】
ニュートンの法則から、もしこのマスクテーブルの回転運動がなければ、平衡質量20、30およびマスクテーブルMTの変位Δyb1、Δyb2およびΔyMTが以下の条件を満足することになる:
【0030】
【数1】

但し:
l1およびl2は、平衡質量20、30の質量中心CGB1、CGB2とマスクテーブルMTの質量中心CGMTの間のX方向距離であり;並びに
mb1、mb2およびmMTは、平衡質量20、30およびマスクテーブルMTの質量である。
【0032】
もし、mb1=mb2=mbおよびl1=l2ならば、式1を次のように変形できる:
【0033】
【数2】
まだ反力をこの平衡質量システム内に含みながら、このマスクステージの偏揺れ(Rz)運動を行うためには、Y1およびY2駆動装置17、18によって加える力を制御してこれらの平衡質量を反対方向に動かすことによるダランベールの力を利用する。もし、この偏揺れ運動をY運動と同時に行うならば、これらの平衡質量が同じ方向に動くかも知れないが異なる量だけ動き、それでこの反対方向の運動が絶対ではなく相対的であることに注意すべきである。このマスクステージの角度θMTだけの反時計方向運動に対して、これらの平衡質量の必要な運動が次の式で与えられる:
【0035】
【数3】
但し、JMTは、マスクテーブルMTの慣性モーメントである。
【0037】
本発明は、この第1および第2平衡質量の質量が等しいことも、それらをマスクテーブルの質量中心から等距離に配置することも要求しないことに注意すべきである。
【0038】
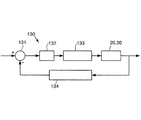
完全な、閉システムでは、マスクテーブルMTと平衡質量20、30の組合わせた質量中心が静止しているが、しかし、マスクテーブルおよび駆動装置へのケーブル配線、駆動装置の整列不良、軸受の微小摩擦、この装置が完全に水平でないこと等のような要因から発生するかも知れない、平衡質量の長期累積並進(ドリフト)を補正するために、負帰還サーボシステムを設けることが好ましい。以下に説明する能動的ドリフト制御システムの代替案として、例えば、低剛性ばねに基づく、受動的システムを使ってもよい。
【0039】
図4は、サーボシステム130の制御ループを示す。この機械フレームに関する平衡質量のYおよびRz設定点を減算器131の正入力に供給し、その出力をサーボ制御器132へ送る。減算器131の負入力への帰還は、平衡質量および被駆動質量(マスクテーブル)の位置を測定する、一つ以上の多自由度測定システム134によって与える。このサーボ制御器は、2自由度アクチュエータシステム133を制御し、それが平衡質量20、30へ必要な補正を加える。これらの平衡質量と被駆動質量の両方の位置を固定基準フレームに対して測定してもよい。その代りに、一つ、例えば、平衡質量の位置をこの基準フレームに対して測定し、被駆動質量の位置をこの平衡質量に対して測定してもよい。後者の場合、この相対位置データをソフトウェアかハードウェアによって絶対位置データに変換することができる。特に、Y方向で、この位置測定を、例えば、米国特許第5,646,730号に記載してあるような、他の自由度の残留相対運動に許容度の高いリニアエンコーダによって行ってもよい。
【0040】
サーボシステム130の設定点は、マスクテーブルMTと平衡質量20、30の組合せ質量中心がX、Y、Rz平面で変らないままであることを保証するように決める。これは、次の条件を定める:
【0041】
【数4】
但し、
【0043】
上に説明したサーボシステムをY方向にだけ使い、他の自由度のドリフト制御をこれらの自由度での平衡質量用支持体の低剛性によって行うことができる。
【0044】
【実施例2】
この発明の第2実施例は、図5および図6に示し、以下に記すことを除いて、第1実施例と同じである。
この第2実施例は、マスクテーブルMTの下の空間を空けておく必要がないように、反射性マスクを使うリソグラフィ装置に特に適当である。この事実を利用して、マスクテーブルMTを第3平衡質量60の上に支持する。第3平衡質量60は、平面の、水平上面を有し、その上で、軸受71、72、73によって支持したマスクテーブルMTを案内する。これらの軸受は、例えば、気体軸受でもよい。次に、この第3平衡質量60を、低剛性ばねを含んでもよい、柔軟な軸受61、62、63によってこの機械ベースフレームの上に支持する。この第3平衡質量60は、XY平面では動かず、それでその代りに板ばねまたは実際の軸受なしにガスシリンダによって支持することが出来る。図示するように、この第2実施例は、X方向作動のために第2平衡質量30の側面に対して作用するX軸受76、77と組合わせて円筒形ボイスコイル74、75を使用する。X軸受76、77は、両方向の力が働くように、対向するパッド軸受または予荷重を掛けた軸受でもよい。
【0045】
【実施例3】
図7および図8に示し、以下に説明することを除いて、第1実施例と同じである第3実施例では、長ストロークモジュールが短ストロークフレーム80をYおよびRzでだけ位置決めする。マスクテーブルMTを短ストロークフレーム80に対して駆動してこのマスクを6自由度で高精度に位置決めする。そのような位置決めは、短ストロークZアクチュエータ81、82、83、Xアクチュエータ84およびYアクチュエータ85、86によって行う。この短ストロークフレーム80は、第1および第2平衡質量20、30の上に剛性Z軸受14’、15’、16’によって支持し、それはこれらの平衡質量の平面上面に作用する気体軸受でもよい。短ストロークフレーム80は、Xでこれらの平衡質量の一つ、この場合第2平衡質量30、に対してだけ、軸受78によっても拘束される。
【0046】
YおよびRz方向に、マスクテーブルMTは、短ストロークフレーム80と共に動き、それで式2および式3で、質量および慣性モーメント、mMTおよびJMTをマスクテーブルMTと短ストロークフレーム80の組合わせた質量および慣性モーメントで置換えるべきである。しかし、他の自由度では、短ストロークフレーム80が平衡質量で動くのを拘束され、それで有効平衡質量を増し、そのストロークを減ずる。マスクテーブルMTの質量中心は、短ストロークフレーム80および平衡質量20、30のそれと共平面であるか、または共平面に近いのが好ましい。
【0047】
【実施例4】
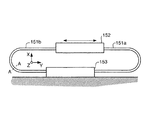
この発明によるケーブルダクト装置を図9および図9Aに示す。二つのケーブルダクト151a、151bを使って、マスクテーブルが要する制御信号および電力のような、ユーティリティ用ケーブルおよびその他の導管を支持する。これら二つのケーブルダクト151a、151bを、マスクテーブルに取付けた端子152と機械フレームに取付けた端子153の間に反対方向に配置し、マスクテーブルがY方向に動くと、一つのケーブルダクトが巻き上がり、他が開くようにする。従って、マスクテーブルのY位置がどこであっても、マスクテーブルと共に動くケーブルダクトの全長は一定のままである。従って、移動質量は一定のままである。また、ケーブルダクトの巻き上がりまたは開こうとする残留傾向は、互いに打消すだろう。ケーブルダクト151a、151bは、線A−Aに沿って見た断面である図9Aに示す、巻尺と同様な、僅かに湾曲した断面を有する。これは、マスクテーブルが動くとき、たるみを防ぎ、きちんとした“U形”を維持するのを助ける。
【0048】
上にこの発明の特定の実施例を説明したが、この発明を説明したのと別の方法で実施してもよいことが判るだろう。この説明は、この発明を制限することを意図しない。特に、この発明をリソグラフィ装置のレチクルまたはマスクテーブルに、および平面での物体の迅速且つ正確な位置決めが望ましい、あらゆる他の型式の装置に使ってもよいことが判るだろう。
【0049】
この明細書は、リソグラフィ装置および方法に専念し、それでマスクを使って投影システムに入射する放射線ビームをパターン化したが、ここに提示するこの発明は、上記放射線ビームをパターン化するために一般的な“パターニング手段”を使うリソグラフィ装置および方法という広い文脈で捕えるべきであることに気付くべきである。ここで使う“パターニング手段”という用語は、入射放射線ビームに、この基板の目標部分に創成すべきパターンに対応する、パターン化した断面を与えるために使うことができる手段を指すと広く解釈すべきであり;“光バルブ”という用語もこの文脈で使ってある。一般的に、上記パターンは、集積回路またはその他のデバイスのような、この目標部分に作るデバイスの特別の機能層に対応するだろう。マスクテーブル上のマスクの他に、そのようなパターニング手段には次のような実施例がある;
− プログラム可能ミラーアレイ。そのような装置の例は、粘弾性制御層および反射面を有するマトリックスアドレス可能面である。そのような装置の背後の基本原理は、(例えば)この反射面のアドレス指定された領域が入射光を回折光として反射し、一方アドレス指定されない領域が入射光を未回折光として反射するということである。適当なフィルタを使って、上記未回折光を反射ビームから濾過して取除き、回折光だけを後に残すことができ;この様にして、このビームがマトリックスアドレス可能面のアドレス指定パターンに従ってパターン化されるようになる。必要なアドレス指定は、適当な電子手段を使って行える。そのようなミラーアレイについての更なる情報は、例えば、米国特許US5,296,891およびUS5,523,193から収集することができ、それらを参考までにここに援用する。
− プログラム可能LCDアレイ。そのような構成の例は、米国特許US5,229,872で与えられ、それを参考までにここに援用する。
【図面の簡単な説明】
【図1】この発明の第1実施例によるリソグラフィ投影装置を描く。
【図2】図1の装置のレチクルステージの平面図である。
【図3】図1の装置のレチクルステージの端面図である。
【図4】本発明の第1実施例で使うサーボ制御機構の線図である。
【図5】この発明の第2実施例のレチクルステージの平面図である。
【図6】この発明の第2実施例のレチクルステージの端面図である。
【図7】この発明の第3実施例のレチクルステージの平面図である。
【図8】この発明の第3実施例のレチクルステージの端面図である。
【図9】この発明の実施例で使えるケーブルダクト装置を示す。
【図9A】この発明の実施例で使えるケーブルダクト装置を示す。
【符号の説明】
17 駆動手段
18 駆動手段
20 第1平衡質量
21 軸受手段
22 軸受手段
23 軸受手段
24 第2駆動手段
25 第2駆動手段
30 第2平衡質量
31 軸受手段
32 軸受手段
33 軸受手段
34 第2駆動手段
35 第2駆動手段
60 第3平衡質量
71 支持手段
72 支持手段
73 支持手段
80 フレーム
130 サーボ制御システム
133 アクチュエータ手段
BP ベース
C 基板の目標部分
IL 照明システム
LA 放射源
MA マスク
MT 第1物体テーブル
PB 投影ビーム
PL 投影システム
W 基板
WT 第2物体テーブル
X 第2方向
Y 第1方向
Z 第3方向
Claims (19)
- リソグラフィ投影装置であって、
放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
マスク(MA)を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記マスクの被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
前記物体テーブル(MT,WT)の少なくとも1つにおける対向側面に沿って配置された第1平衡質量(20)および第2平衡質量(30)と、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を移動させるための第1モータ(18)および第2モータ(17)であって、各モータは2つの協働する電磁部材を有し、第1の電磁部材は、前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)に、機能できる状態で関連付けられており、第2の電磁部材は、前記第1および第2平衡質量(20,30)の少なくとも1つに、機能できる状態で関連付けられている、第1モータ(18)および第2モータ(17)と、
上部表面が実質的に平坦かつ水平である基盤構造(40,50)と、
を含み、
前記第1および第2平衡質量(20,30)は、少なくとも第1方向(Y)に移動できるようになっており、それにより、前記第1および第2平衡質量 (20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を平衡状態にすることができるようになっており、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)は、支持構造によって支持されており、
前記第1および第2平衡質量(20,30)は、前記実質的に平坦で水平な上部表面に作用する複数の軸受(21,22,23,31,32,33)によって、前記第1方向(Y)に実質的に直交する第3方向(Z)で支持されており、
前記第1および第2平衡質量(20,30)は、前記第1方向(Y)および前記第3方向(Z)に実質的に直交する第2方向(X)に移動することができ、
前記第1および第2平衡質量(20,30)の前記第2方向(X)への移動は、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)により供給される、投影装置。 - リソグラフィ投影装置であって、
放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
マスク(MA)を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記マスクの被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
前記物体テーブル(MT,WT)の少なくとも1つにおける対向側面に沿って配置された第1平衡質量(20)および第2平衡質量(30)と、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を移動させるための第1モータ(18)および第2モータ(17)であって、各モータは2つの協働する電磁部材を有し、第1の電磁部材は、前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)に、機能できる状態で関連付けられており、第2の電磁部材は、前記第1および第2平衡質量(20,30)の少なくとも1つに、機能できる状態で関連付けられている、第1モータ(18)および第2モータ(17)とを含み、
前記第1および第2平衡質量(20,30)は、少なくとも第1方向(Y)に移動できるようになっており、さらに、前記第1および第2平衡質量(20,30)の前記第2方向(X)への移動が、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)により供給されて、前記第1および第2平衡質量 (20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を平衡状態にすることができるようになっており、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)は、前記第1および第2平衡質量(20,30)とは異なる支持構造によって、少なくとも部分的に支持されている投影装置。 - 請求項2に記載する投影装置において、
前記支持構造の上部表面は平面状かつ水平である投影装置。 - 請求項2に記載する投影装置において、
前記支持構造と前記第1および第2平衡質量(20,30)とは、共通のベースフレームに支持されている投影装置。 - 請求項2に記載する投影装置において、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)は、空気軸受によって支持されている投影装置。 - 請求項2に記載する投影装置において、
前記各モータ(18,17)は、さらに、ロングストローク位置決めモジュールを含む投影装置。 - 請求項2に記載する投影装置において、
前記第1および第2モータ(18,17)は、前記第1および第2平衡質量(20,30)に互いに反対方向の力を加えて、前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を回転させるように構成されている投影装置。 - 放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
マスク(MA)を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記マスクの被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
前記物体テーブル(MT,WT)の少なくとも1つにおける対向側面に沿って配置された第1平衡質量(20)および第2平衡質量(30)と、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を支持するための支持構造と、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を移動させるための第1モータ(18)および第2モータ(17)であって、各モータは2つの協働する電磁部材を有し、第1の電磁部材は、前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)に、機能できる状態で関連付けられており、第2の電磁部材は、前記第1および第2平衡質量(20,30)の少なくとも1つに、機能できる状態で関連付けられている、第1モータ(18)および第2モータ(17)とを含み、
前記第1および第2平衡質量(20,30)は、少なくとも第1方向(Y)に移動できるようになっており、さらに、前記第1および第2平衡質量(20,30)の前記第2方向(X)への移動が、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)により供給されて、前記第1および第2平衡質量 (20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を平衡状態にすることができるようになっている投影装置。 - 請求項8に記載する投影装置において、
前記支持構造の上部表面は平面状かつ水平である投影装置。 - 請求項8に記載する投影装置において、
前記支持構造と前記第1および第2平衡質量(20,30)とは、共通のベースフレームに支持されている投影装置。 - 請求項8に記載する投影装置において、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)は、空気軸受によって支持されている投影装置。 - 請求項8に記載する投影装置において、
前記各モータ(18,17)は、さらに、ロングストローク位置決めモジュールを含む投影装置。 - 請求項8に記載する投影装置において、
前記第1および第2モータ(18,17)は、前記第1および第2平衡質量(20,30)に互いに反対方向の力を加えて、前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を回転させるように構成されている投影装置。 - 請求項8に記載する投影装置において、
さらに、基盤構造と、当該基盤構造に結合され、実質的に平坦で水平な上部表面を有する平行レール(40,50)とを含み、
前記第1および第2平衡質量(20,30)は、前記実質的に平坦で水平な上部表面に作用する複数の軸受(21,22,23,31,32,33)によって、前記第1方向(Y)に実質的に直交する第3方向(Z)に支持される投影装置。 - リソグラフィ投影装置であって、
放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
マスク(MA)を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記マスクの被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
前記物体テーブル(MT,WT)の少なくとも1つを位置決めするための平衡物体テーブル位置決めシステムとを含み、
前記平衡物体テーブル位置決めシステムは、
前記平衡物体テーブル位置決めシステムにより位置決めされる物体テーブル(MT,WT)と、
第1平衡質量(20)および第2平衡質量(30)と、
前記平衡物体テーブル位置決めシステムにより位置決めされる物体テーブル(MT,WT)を支持するための支持構造と、
前記第1および第2平衡質量(20,30)が少なくとも第1方向(Y)に移動できるようにそれらの各々を支持するための軸受と、
前記第1および第2平衡質量(20,30)が前記第2方向(X)への移動できるように、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)と、
前記平衡物体テーブル位置決めシステムにより位置決めされる物体テーブル(MT,WT)と前記第1または第2平衡質量(20,30)との間に作用して、前記平衡物体テーブル位置決めシステムにより位置決めされる物体テーブル(MT,WT)を前記第1方向(Y)に直交する軸(Z)の周りに回転(Rz)させるアクチュエータ(81,82,83,84,85,86)と、
前記第1および第2平衡質量(20,30)に偏倚力を加えることができるようになっており、それにより、前記第1および第2平衡質量(20,30)、前記アクチュエータおよび前記平衡物体テーブル位置決めシステムにより位置決めされる物体テーブル(MT,WT)の組み合わせ質量中心を所望の位置に向けて偏倚して、前記第1および第2平衡質量(20,30)のドリフトを制限するためのドリフト制御システム(130)と、
を含む投影装置。 - リソグラフィ投影装置であって、
放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
マスク(MA)を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記マスクの被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
第1平衡質量(20)および第2平衡質量(30)と、
前記物体テーブル(MT,WT)の少なくとも1つを支持するための支持構造と、
前記支持構造により支持される物体テーブル(MT,WT)を位置決めするための平衡物体テーブル位置決めシステムとを含み、ここで、前記支持構造により支持される物体テーブル(MT,WT)は前記第1および第2平衡質量(20,30)の少なくとも1つによって少なくとも部分的に支持され、
前記平衡物体テーブル位置決めシステムは、
前記第1および第2平衡質量(20,30)が少なくとも第1方向(Y)に移動できるようにそれらの各々を支持するための軸受と、
前記第1および第2平衡質量(20,30)が前記第2方向(X)への移動できるように、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)と、
前記第1および第2平衡質量(20,30)に互いに反対方向に力を加えることによって、前記支持構造により支持される物体テーブル(MT,WT)を回転(Rz)させるように配置されているアクチュエータ(81,82,83,84,85,86)と、
を含む投影装置。 - リソグラフィ投影装置であって、
放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
マスク(MA)を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記マスクの被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
第1平衡質量(20)および第2平衡質量(30)と、
前記物体テーブル(MT,WT)の少なくとも1つを支持するための支持構造と、
前記支持構造により支持される物体テーブル(MT,WT)を位置決めするための平衡物体テーブル位置決めシステムとを含み、ここで、前記支持構造により支持される物体テーブル(MT,WT)は前記第1および第2平衡質量(20,30)の少なくとも1つによって少なくとも部分的に支持され、
前記平衡物体テーブル位置決めシステムは、
前記第1および第2平衡質量(20,30)が少なくとも第1方向(Y)に移動できるようにそれらの各々を支持するための軸受と、
前記第1および第2平衡質量(20,30)が前記第2方向(X)への移動できるように、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)と、
前記第1および第2平衡質量(20,30)に互いに反対方向に力を加えることによって、前記支持構造により支持される物体テーブル(MT,WT)を回転(Rz)させるように配置されているアクチュエータ(81,82,83,84,85,86)であって、当該アクチュエータ (81,82,83,84,85,86)によって前記支持構造により支持される物体テーブル(MT,WT)に加えられる力が、当該アクチュエータ (81,82,83,84,85,86)によって前記第1および第2平衡質量(20,30)に加えられる反力に等しくなるように構成され、かつ、配置されているアクチュエータ(81,82,83,84,85,86)と、
を含む投影装置。 - リソグラフィ投影装置であって、
パターニング手段と、
基板(W)を保持するための物体テーブル(WT)と、
前記パターニング手段の被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
前記物体テーブル(WT)における対向側面に沿って配置された第1平衡質量(20)および第2平衡質量(30)と、
前記物体テーブル(WT)を支持するための支持構造と、
前記物体テーブル(WT)を移動させるための第1モータ(18)および第2モータ(17)であって、各モータは2つの協働する電磁部材を有し、第1の電磁部材は、前記物体テーブル(WT)に、機能できる状態で関連付けられており、第2の電磁部材は、前記第1および第2平衡質量(20,30)の少なくとも1つに、機能できる状態で関連付けられている、第1モータ(18)および第2モータ(17)とを含み、
前記第1および第2平衡質量(20,30)は、少なくとも第1方向(Y)に移動できるようになっており、さらに、前記第1および第2平衡質量(20,30)の前記第2方向(X)への移動が、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)により供給されて、前記物体テーブル(WT)を平衡状態にすることができるようになっている投影装置。 - リソグラフィ投影装置であって、
放射線の投影ビーム(PB)を供給するための放射線システム(LA,IL)と、
パターニング手段を保持するための第1物体テーブル(MT)と、
基板(W)を保持するための第2物体テーブル(WT)と、
前記パターニング手段の被照射部分を前記基板の目標部分(C)上に結像するための投影システム(PL)と、
前記物体テーブル(MT,WT)の少なくとも1つにおける対向側面に沿って配置された第1平衡質量(20)および第2平衡質量(30)と、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を支持するための支持構造と、
前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を移動させるための第1モータ(18)および第2モータ(17)であって、各モータは2つの協働する電磁部材を有し、第1の電磁部材は、前記第1および第2平衡質量(20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)に、機能できる状態で関連付けられており、第2の電磁部材は、前記第1および第2平衡質量(20,30)の少なくとも1つに、機能できる状態で関連付けられている、第1モータ(18)および第2モータ(17)とを含み、
前記第1および第2平衡質量(20,30)は、少なくとも第1方向(Y)に移動できるようになっており、さらに、前記第1および第2平衡質量(20,30)の前記第2方向(X)への移動が、基盤構造(40,50)の実質的に垂直な壁(42,52)に対して作用する柔軟な軸受(24,25,34,35)により供給されて、前記第1および第2平衡質量 (20,30)がその対向側面に沿って配置された物体テーブル(MT,WT)を平衡状態にすることができるようになっている投影装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP99310371.2 | 1999-12-21 | ||
| EP99310371 | 1999-12-21 |
Related Child Applications (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005155600A Division JP4490875B2 (ja) | 1999-12-21 | 2005-05-27 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2008321451A Division JP4914885B2 (ja) | 1999-12-21 | 2008-12-17 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2008321432A Division JP4621765B2 (ja) | 1999-12-21 | 2008-12-17 | リソグラフィ投影装置に使うための平衡位置決めシステム |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2001351856A JP2001351856A (ja) | 2001-12-21 |
| JP2001351856A5 JP2001351856A5 (ja) | 2005-10-06 |
| JP4279449B2 true JP4279449B2 (ja) | 2009-06-17 |
Family
ID=8241828
Family Applications (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2000404376A Expired - Fee Related JP4279449B2 (ja) | 1999-12-21 | 2000-12-19 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2005155600A Expired - Lifetime JP4490875B2 (ja) | 1999-12-21 | 2005-05-27 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2008321432A Expired - Fee Related JP4621765B2 (ja) | 1999-12-21 | 2008-12-17 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2008321451A Expired - Fee Related JP4914885B2 (ja) | 1999-12-21 | 2008-12-17 | リソグラフィ投影装置に使うための平衡位置決めシステム |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005155600A Expired - Lifetime JP4490875B2 (ja) | 1999-12-21 | 2005-05-27 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2008321432A Expired - Fee Related JP4621765B2 (ja) | 1999-12-21 | 2008-12-17 | リソグラフィ投影装置に使うための平衡位置決めシステム |
| JP2008321451A Expired - Fee Related JP4914885B2 (ja) | 1999-12-21 | 2008-12-17 | リソグラフィ投影装置に使うための平衡位置決めシステム |
Country Status (5)
| Country | Link |
|---|---|
| US (3) | US6449030B1 (ja) |
| JP (4) | JP4279449B2 (ja) |
| KR (1) | KR100570252B1 (ja) |
| DE (1) | DE60033773T2 (ja) |
| TW (1) | TW546551B (ja) |
Families Citing this family (53)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| TW546551B (en) * | 1999-12-21 | 2003-08-11 | Asml Netherlands Bv | Balanced positioning system for use in lithographic apparatus |
| JP3814453B2 (ja) | 2000-01-11 | 2006-08-30 | キヤノン株式会社 | 位置決め装置、半導体露光装置およびデバイス製造方法 |
| TW588222B (en) * | 2000-02-10 | 2004-05-21 | Asml Netherlands Bv | Cooling of voice coil motors in lithographic projection apparatus |
| JP4474020B2 (ja) * | 2000-06-23 | 2010-06-02 | キヤノン株式会社 | 移動装置及び露光装置 |
| EP1189018B1 (de) * | 2000-09-15 | 2009-02-25 | Vistec Electron Beam GmbH | Sechsachsiges Positioniersystem mit magnetfeldfreiem Raum |
| US6958808B2 (en) * | 2000-11-16 | 2005-10-25 | Nikon Corporation | System and method for resetting a reaction mass assembly of a stage assembly |
| US6757053B1 (en) | 2000-11-16 | 2004-06-29 | Nikon Corporation | Stage assembly including a reaction mass assembly |
| US6593997B1 (en) * | 2000-11-16 | 2003-07-15 | Nikon Corporation | Stage assembly including a reaction assembly |
| US6885430B2 (en) * | 2000-11-16 | 2005-04-26 | Nikon Corporation | System and method for resetting a reaction mass assembly of a stage assembly |
| US6603531B1 (en) * | 2000-11-16 | 2003-08-05 | Nikon Corporation | Stage assembly including a reaction assembly that is connected by actuators |
| US6906334B2 (en) * | 2000-12-19 | 2005-06-14 | Nikon Corporation | Curved I-core |
| US6987558B2 (en) * | 2001-01-16 | 2006-01-17 | Nikon Corporation | Reaction mass for a stage device |
| JP2002283174A (ja) * | 2001-03-26 | 2002-10-03 | Fanuc Ltd | 直線駆動装置 |
| JP2003059797A (ja) * | 2001-08-09 | 2003-02-28 | Canon Inc | 移動装置、ステージ装置及び露光装置 |
| US6597435B2 (en) * | 2001-10-09 | 2003-07-22 | Nikon Corporation | Reticle stage with reaction force cancellation |
| JP4011919B2 (ja) * | 2002-01-16 | 2007-11-21 | キヤノン株式会社 | 移動装置及び露光装置並びに半導体デバイスの製造方法 |
| SG106667A1 (en) * | 2002-02-12 | 2004-10-29 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method |
| JP3679767B2 (ja) | 2002-02-26 | 2005-08-03 | キヤノン株式会社 | ステージ位置決め装置及びその制御方法、露光装置、半導体デバイスの製造方法 |
| US6724466B2 (en) * | 2002-03-26 | 2004-04-20 | Nikon Corporation | Stage assembly including a damping assembly |
| US7061577B2 (en) | 2002-03-26 | 2006-06-13 | Nikon Corporation | Image adjustor including damping assembly |
| US7268504B2 (en) * | 2002-05-24 | 2007-09-11 | Kollomorgen Corporation | Stator position feedback controller |
| KR100522885B1 (ko) * | 2002-06-07 | 2005-10-20 | 에이에스엠엘 네델란즈 비.브이. | 리소그래피장치 및 디바이스제조방법 |
| US7239369B2 (en) * | 2002-09-30 | 2007-07-03 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method |
| JP3962669B2 (ja) * | 2002-10-08 | 2007-08-22 | キヤノン株式会社 | 移動装置及び露光装置並びにデバイスの製造方法 |
| JP2004152902A (ja) * | 2002-10-29 | 2004-05-27 | Canon Inc | 位置決め装置 |
| US6963821B2 (en) * | 2003-02-11 | 2005-11-08 | Nikon Corporation | Stage counter mass system |
| KR101861493B1 (ko) * | 2003-04-11 | 2018-05-28 | 가부시키가이샤 니콘 | 액침 리소그래피 머신에서 웨이퍼 교환동안 투영 렌즈 아래의 갭에서 액침 액체를 유지하는 장치 및 방법 |
| TWI347741B (en) * | 2003-05-30 | 2011-08-21 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method |
| US20040252287A1 (en) * | 2003-06-11 | 2004-12-16 | Michael Binnard | Reaction frame assembly that functions as a reaction mass |
| TW201721717A (zh) | 2003-06-19 | 2017-06-16 | 尼康股份有限公司 | 曝光裝置、曝光方法、及元件製造方法 |
| TWI245163B (en) | 2003-08-29 | 2005-12-11 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method |
| US7221433B2 (en) | 2004-01-28 | 2007-05-22 | Nikon Corporation | Stage assembly including a reaction assembly having a connector assembly |
| US7589822B2 (en) | 2004-02-02 | 2009-09-15 | Nikon Corporation | Stage drive method and stage unit, exposure apparatus, and device manufacturing method |
| US7224432B2 (en) * | 2004-05-14 | 2007-05-29 | Canon Kabushiki Kaisha | Stage device, exposure apparatus, and device manufacturing method |
| WO2006046101A1 (en) * | 2004-10-27 | 2006-05-04 | Carl Zeiss Smt Ag | A six degree of freedom (dof) actuator reaction mass |
| US7193683B2 (en) * | 2005-01-06 | 2007-03-20 | Nikon Corporation | Stage design for reflective optics |
| US7456935B2 (en) * | 2005-04-05 | 2008-11-25 | Asml Netherlands B.V. | Lithographic apparatus and device manufacturing method utilizing a positioning device for positioning an object table |
| US7696652B2 (en) * | 2005-11-01 | 2010-04-13 | Asml Netherlands B.V. | Electromagnetic actuator, method of manufacturing a part of an electromagnetic actuator, and lithographic apparatus comprising and electromagnetic actuator |
| US20070268475A1 (en) * | 2006-05-16 | 2007-11-22 | Nikon Corporation | System and method for controlling a stage assembly |
| US7502103B2 (en) * | 2006-05-31 | 2009-03-10 | Asml Netherlands B.V. | Metrology tool, system comprising a lithographic apparatus and a metrology tool, and a method for determining a parameter of a substrate |
| US7538273B2 (en) * | 2006-08-08 | 2009-05-26 | Asml Netherlands B.V. | Cable connection to decrease the passing on of vibrations from a first object to a second object |
| US20080285004A1 (en) * | 2007-05-18 | 2008-11-20 | Nikon Corporation | Monolithic, Non-Contact Six Degree-of-Freedom Stage Apparatus |
| NL1036161A1 (nl) * | 2007-11-20 | 2009-05-25 | Asml Netherlands Bv | Combination of structure and an active damping system, and a lithographic apparatus. |
| WO2009110202A1 (ja) * | 2008-03-07 | 2009-09-11 | 株式会社ニコン | 移動体装置及び露光装置 |
| US8144310B2 (en) | 2008-04-14 | 2012-03-27 | Asml Netherlands B.V. | Positioning system, lithographic apparatus and device manufacturing method |
| WO2011108170A1 (ja) * | 2010-03-04 | 2011-09-09 | 株式会社安川電機 | ステージ装置 |
| DE102011006024A1 (de) * | 2011-03-24 | 2012-09-27 | Carl Zeiss Smt Gmbh | Anordnung zur Vibrationsisolation einer Nutzlast |
| WO2013039389A2 (en) * | 2011-09-12 | 2013-03-21 | Mapper Lithography Ip B.V. | Target positioning device, method for driving a target positioning device, and a lithography system comprising such a target positioning device |
| NL2009902A (en) | 2011-12-27 | 2013-07-01 | Asml Netherlands Bv | Lithographic apparatus and device manufacturing method. |
| US9921494B2 (en) | 2012-04-27 | 2018-03-20 | Asml Netherlands B.V. | Lithographic apparatus comprising an actuator, and method for protecting such actuator |
| CN103809384B (zh) * | 2012-11-12 | 2016-03-09 | 上海微电子装备有限公司 | 工件台与掩模台公用的平衡质量系统及光刻机 |
| WO2015158793A1 (en) * | 2014-04-16 | 2015-10-22 | Asml Netherlands B.V. | Lithographic apparatus, method for positioning an object in a lithographic apparatus and device manufacturing method |
| DE102019207940A1 (de) * | 2019-05-29 | 2020-12-03 | Brose Fahrzeugteile SE & Co. Kommanditgesellschaft, Würzburg | Verfahren zum dynamischen Wuchten eines Rotationskörpers |
Family Cites Families (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6018918A (ja) * | 1983-07-13 | 1985-01-31 | Canon Inc | ステージ装置 |
| US4781067A (en) * | 1987-04-30 | 1988-11-01 | Sonoscan, Inc. | Balanced scanning mechanism |
| US5523193A (en) * | 1988-05-31 | 1996-06-04 | Texas Instruments Incorporated | Method and apparatus for patterning and imaging member |
| JP2960423B2 (ja) * | 1988-11-16 | 1999-10-06 | 株式会社日立製作所 | 試料移動装置及び半導体製造装置 |
| US5208497A (en) | 1989-04-17 | 1993-05-04 | Sharp Kabushiki Kaisha | Linear driving apparatus |
| NL8902471A (nl) | 1989-10-05 | 1991-05-01 | Philips Nv | Tweetraps positioneerinrichting. |
| JPH03273607A (ja) | 1990-03-23 | 1991-12-04 | Canon Inc | 移動テーブル装置 |
| DE59105735D1 (de) * | 1990-05-02 | 1995-07-20 | Fraunhofer Ges Forschung | Belichtungsvorrichtung. |
| JP2752248B2 (ja) * | 1990-11-30 | 1998-05-18 | シャープ株式会社 | リニアモータ装置 |
| NL9100202A (nl) | 1991-02-05 | 1992-09-01 | Asm Lithography Bv | Lithografische inrichting met een hangende objecttafel. |
| NL9100407A (nl) * | 1991-03-07 | 1992-10-01 | Philips Nv | Optisch lithografische inrichting met een krachtgecompenseerd machinegestel. |
| US5301013A (en) | 1991-07-30 | 1994-04-05 | U.S. Philips Corporation | Positioning device having two manipulators operating in parallel, and optical lithographic device provided with such a positioning device |
| JP2714502B2 (ja) * | 1991-09-18 | 1998-02-16 | キヤノン株式会社 | 移動ステージ装置 |
| US5229872A (en) * | 1992-01-21 | 1993-07-20 | Hughes Aircraft Company | Exposure device including an electrically aligned electronic mask for micropatterning |
| US5504407A (en) * | 1992-02-21 | 1996-04-02 | Canon Kabushiki Kaisha | Stage driving system |
| US5477304A (en) * | 1992-10-22 | 1995-12-19 | Nikon Corporation | Projection exposure apparatus |
| JP3277581B2 (ja) * | 1993-02-01 | 2002-04-22 | 株式会社ニコン | ステージ装置および露光装置 |
| US5537186A (en) * | 1993-08-03 | 1996-07-16 | Canon Kabushiki Kaisha | Movable stage mechanism and exposure apparatus using the same |
| JP3073879B2 (ja) * | 1994-03-25 | 2000-08-07 | キヤノン株式会社 | 除振装置 |
| US5528118A (en) * | 1994-04-01 | 1996-06-18 | Nikon Precision, Inc. | Guideless stage with isolated reaction stage |
| US5874820A (en) * | 1995-04-04 | 1999-02-23 | Nikon Corporation | Window frame-guided stage mechanism |
| US5715064A (en) * | 1994-06-17 | 1998-02-03 | International Business Machines Corporation | Step and repeat apparatus having enhanced accuracy and increased throughput |
| US6246204B1 (en) * | 1994-06-27 | 2001-06-12 | Nikon Corporation | Electromagnetic alignment and scanning apparatus |
| JP3800616B2 (ja) * | 1994-06-27 | 2006-07-26 | 株式会社ニコン | 目標物移動装置、位置決め装置及び可動ステージ装置 |
| US5826129A (en) * | 1994-06-30 | 1998-10-20 | Tokyo Electron Limited | Substrate processing system |
| US5623853A (en) * | 1994-10-19 | 1997-04-29 | Nikon Precision Inc. | Precision motion stage with single guide beam and follower stage |
| US5763966A (en) * | 1995-03-15 | 1998-06-09 | Hinds; Walter E. | Single plane motor system generating orthogonal movement |
| JP3506158B2 (ja) | 1995-04-14 | 2004-03-15 | 株式会社ニコン | 露光装置及び走査型露光装置、並びに走査露光方法 |
| TW316874B (ja) * | 1995-05-30 | 1997-10-01 | Philips Electronics Nv | |
| US5750897A (en) * | 1995-06-14 | 1998-05-12 | Canon Kabushiki Kaisha | Active anti-vibration apparatus and method of manufacturing the same |
| JP4075966B2 (ja) | 1996-03-06 | 2008-04-16 | エーエスエムエル ネザーランズ ビー.ブイ. | 差分干渉計システム及びこのシステムを具えたリソグラフステップアンドスキャン装置 |
| JP3571471B2 (ja) * | 1996-09-03 | 2004-09-29 | 東京エレクトロン株式会社 | 処理方法,塗布現像処理システム及び処理システム |
| JP3548353B2 (ja) * | 1996-10-15 | 2004-07-28 | キヤノン株式会社 | ステージ装置およびこれを用いた露光装置ならびにデバイス製造方法 |
| DE69717975T2 (de) | 1996-12-24 | 2003-05-28 | Asml Netherlands B.V., Veldhoven | In zwei richtungen ausgewogenes positioniergerät, sowie lithographisches gerät mit einem solchen positioniergerät |
| US5815246A (en) | 1996-12-24 | 1998-09-29 | U.S. Philips Corporation | Two-dimensionally balanced positioning device, and lithographic device provided with such a positioning device |
| US6170622B1 (en) * | 1997-03-07 | 2001-01-09 | Canon Kabushiki Kaisha | Anti-vibration apparatus and anti-vibration method thereof |
| DE69829614T2 (de) | 1997-03-10 | 2006-03-09 | Asml Netherlands B.V. | Lithographiegerät mit einer positioniervorrichtung mit zwei objekthaltern |
| US5981118A (en) * | 1997-04-11 | 1999-11-09 | Fujitsu Ltd. | Method for charged particle beam exposure with fixed barycenter through balancing stage scan |
| US6028376A (en) * | 1997-04-22 | 2000-02-22 | Canon Kabushiki Kaisha | Positioning apparatus and exposure apparatus using the same |
| US6408045B1 (en) * | 1997-11-11 | 2002-06-18 | Canon Kabushiki Kaisha | Stage system and exposure apparatus with the same |
| US5959427A (en) * | 1998-03-04 | 1999-09-28 | Nikon Corporation | Method and apparatus for compensating for reaction forces in a stage assembly |
| JP4109747B2 (ja) * | 1998-05-07 | 2008-07-02 | キヤノン株式会社 | アクティブ除振装置および露光装置 |
| TWI242113B (en) * | 1998-07-17 | 2005-10-21 | Asml Netherlands Bv | Positioning device and lithographic projection apparatus comprising such a device |
| US6252234B1 (en) * | 1998-08-14 | 2001-06-26 | Nikon Corporation | Reaction force isolation system for a planar motor |
| US6286655B1 (en) * | 1999-04-29 | 2001-09-11 | Advanced Sorting Technologies, Llc | Inclined conveyor |
| AU6005499A (en) * | 1999-10-07 | 2001-04-23 | Nikon Corporation | Substrate, stage device, method of driving stage, exposure system and exposure method |
| TW546551B (en) * | 1999-12-21 | 2003-08-11 | Asml Netherlands Bv | Balanced positioning system for use in lithographic apparatus |
| TWI264617B (en) * | 1999-12-21 | 2006-10-21 | Asml Netherlands Bv | Balanced positioning system for use in lithographic apparatus |
| US6281655B1 (en) * | 1999-12-23 | 2001-08-28 | Nikon Corporation | High performance stage assembly |
-
2000
- 2000-12-12 TW TW089126470A patent/TW546551B/zh not_active IP Right Cessation
- 2000-12-19 JP JP2000404376A patent/JP4279449B2/ja not_active Expired - Fee Related
- 2000-12-19 KR KR1020000078676A patent/KR100570252B1/ko not_active IP Right Cessation
- 2000-12-19 US US09/739,098 patent/US6449030B1/en not_active Expired - Lifetime
- 2000-12-19 DE DE60033773T patent/DE60033773T2/de not_active Expired - Fee Related
-
2002
- 2002-08-02 US US10/209,926 patent/US6671036B2/en not_active Expired - Lifetime
-
2003
- 2003-08-28 US US10/649,608 patent/US6924882B2/en not_active Expired - Lifetime
-
2005
- 2005-05-27 JP JP2005155600A patent/JP4490875B2/ja not_active Expired - Lifetime
-
2008
- 2008-12-17 JP JP2008321432A patent/JP4621765B2/ja not_active Expired - Fee Related
- 2008-12-17 JP JP2008321451A patent/JP4914885B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| US6924882B2 (en) | 2005-08-02 |
| US20020048009A1 (en) | 2002-04-25 |
| DE60033773D1 (de) | 2007-04-19 |
| DE60033773T2 (de) | 2007-11-08 |
| JP2009141371A (ja) | 2009-06-25 |
| JP2005333145A (ja) | 2005-12-02 |
| JP4914885B2 (ja) | 2012-04-11 |
| KR20010067452A (ko) | 2001-07-12 |
| US6449030B1 (en) | 2002-09-10 |
| JP4621765B2 (ja) | 2011-01-26 |
| TW546551B (en) | 2003-08-11 |
| JP4490875B2 (ja) | 2010-06-30 |
| US20020191173A1 (en) | 2002-12-19 |
| US6671036B2 (en) | 2003-12-30 |
| KR100570252B1 (ko) | 2006-04-12 |
| JP2009135507A (ja) | 2009-06-18 |
| US20040041994A1 (en) | 2004-03-04 |
| JP2001351856A (ja) | 2001-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4279449B2 (ja) | リソグラフィ投影装置に使うための平衡位置決めシステム | |
| KR100573669B1 (ko) | 리소그래피 장치용 균형화 위치결정시스템 | |
| US6788386B2 (en) | Lithographic apparatus and device manufacturing method | |
| US7656062B2 (en) | Split coil linear motor for z force | |
| US7459701B2 (en) | Stage apparatus, lithographic apparatus and device manufacturing method | |
| JP6862543B2 (ja) | モータアセンブリ、リソグラフィ装置、及びデバイス製造方法 | |
| US20080285004A1 (en) | Monolithic, Non-Contact Six Degree-of-Freedom Stage Apparatus | |
| JP3927924B2 (ja) | リソグラフィ装置およびデバイス製造方法 | |
| US7586218B2 (en) | Moving apparatus, exposure apparatus, and device manufacturing method | |
| US20070267995A1 (en) | Six Degree-of-Freedom Stage Apparatus | |
| US6917412B2 (en) | Modular stage with reaction force cancellation | |
| EP1111469B1 (en) | Lithographic apparatus with a balanced positioning system | |
| EP1111470B1 (en) | Lithographic apparatus with a balanced positioning system | |
| US7692768B2 (en) | Iron core motor driven automatic reticle blind | |
| JP2003282432A (ja) | デバイスの製造方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20040820 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20040820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050527 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20060915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20061003 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20061010 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20061227 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20070105 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070403 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20070322 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20080617 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20080916 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20080919 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20081217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090226 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090312 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120319 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4279449 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S802 | Written request for registration of partial abandonment of right |
Free format text: JAPANESE INTERMEDIATE CODE: R311802 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120319 Year of fee payment: 3 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120319 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130319 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140319 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |