JP4060185B2 - 縁接触を減じたウェーハ・ハンドリング・システムおよび改造方法およびその使用 - Google Patents
縁接触を減じたウェーハ・ハンドリング・システムおよび改造方法およびその使用 Download PDFInfo
- Publication number
- JP4060185B2 JP4060185B2 JP2002547208A JP2002547208A JP4060185B2 JP 4060185 B2 JP4060185 B2 JP 4060185B2 JP 2002547208 A JP2002547208 A JP 2002547208A JP 2002547208 A JP2002547208 A JP 2002547208A JP 4060185 B2 JP4060185 B2 JP 4060185B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- chuck
- support surface
- arm
- transfer
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
Images















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68728—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a plurality of separate clamping members, e.g. clamping fingers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/139—Associated with semiconductor wafer handling including wafer charging or discharging means for vacuum chamber
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/14—Wafer cassette transporting
Description
本発明はウェーハ・ハンドリング、特に半導体の製造時における半導体ウェーハの移送および保持、さらに、200ミリメートル(mm)以上の直径のウェーハに関する。
【0002】
(発明の背景)
半導体産業において、多数の会社がデバイス製造のために半導体ウェーハ、特にシリコン・ウェーハを処理するための設備を製造している。半導体ウェーハ処理設備は、その設備を通してウェーハを移動し、処理の間にウェーハを保持するために自動化されたロボット式のウェーハ・ハンドリング装置を使用している。工業的なウェーハ・ハンドリング装置は真空チャックを典型的に使用しており、真空チャックはウェーハの裏面に接触する真空式スパチュラ(へら)または端部操作具をロボット・アームに備えている。一層多機能なハンドリング装置によれば、ウェーハとの接触は真空チャックによりウェーハの中央の円形面積部分にて行われる。1つのそのようなハンドリング装置は本明細書にその記載内容全体を援用する米国特許第5820329号に記載されている。そのウェーハのハンドリングは、ウェーハ・デバイス面を処理するための多くのウェーハ処理機械において典型とされている。
【0003】
半導体の製造では、ウェーハのデバイス面の処理が完了すると、裏面に金属層がしばしば付与される。幾つかのデバイスでは、この金属層はしばしば金とされる。金による裏面の金属処理およびそのような処理のためのウェーハ・ホルダーは、共通して譲渡された1999年1月8日付け出願の米国特許出願第09/227911号に記載されており、本明細書にその記載内容全体を援用する。裏面の金属処理のために、ウェーハのデバイス面を処理するために使用された設備と同様な処理設備が使用されるが、ウェーハの配向は逆とされる。部分処理されたウェーハの配向の反転は、ウェーハ中央のデバイスをウェーハ移送アームの真空チャックが接触するように露出させることになる。デバイスは通常は、損傷の影響を受けずにそのような接触を行われることはできない。
【0004】
この理由により、ウェーハの周縁の内側の6mm幅のリングに沿ってウェーハをグリップするために真空チャックが開発された。この結果、ウェーハ周縁の6mm幅のリングがデバイス製造に使用できないウェーハの除外領域として取残された。6mm幅の除外リングは、ハンドリング装置で要求される垂直、水平および逆配向にて真空チャックがウェーハを確実に保持できるようにするのに十分な表面積を与えるために必要である。典型的に、直径が200mmのウェーハでは、ウェーハ周縁に沿ってウェーハ・ハンドリング装置の部材が係合するウェーハ上の6mm幅の接触面積部分は、36平方センチメートル、すなわちウェーハの面積の12%を超える面積となる。産業界では、ウェーハとウェーハ・ハンドリング装置との接触面積を減少させる、好ましくは200mmまたは300mm径のウェーハ周縁のまわりに2mmを超えないように減少させることが必要であると言われてきた。2mm幅の除外領域は200mm径のウェーハで12平方センチメートル、300mm径のウェーハで18平方センチメートル程の面積しか含まない。この要求は従来技術で満たされなかった。
【0005】
ウェーハ・ハンドリング装置は、それが一部を構成するか相互に作用する機械の作動および制御に関連して作動し、制御される。ウェーハ・ハンドリング装置の特性および作動における基本的な変化は、それが生じるならば、半導体処理機械の作動および制御と相容れることができず、不利に作用する。ウェーハ・ハンドリング装置の変化が機械の交換または再設計によって行われないならば、作動ソフトウェアおよびシステム作動に影響を与える。
【0006】
これらの接触面積は、デバイス製造に関して制御された面積部分によって境界されたウェーハ部分の使用を典型的に防止し、ウェーハ1枚当たりのデバイス量を制限する。パターンの幾何形状が小さくなり、ウェーハ1枚当たりのデバイス量の増大の要求が大きくなるにつれて、ウェーハの有効面積を増大する必要性が大きくなる。
【0007】
従って、ウェーハとの接触が許される小さな接触面積または除外領域を与えるウェーハ・ハンドリング装置およびウェーハ・ハンドリング技術が要求される。また、そのような改良されたハンドリング装置またはハンドリング技術を使用する機械の作動ソフトウェアおよびシステム作動に影響を与えないそのような改良されたウェーハ・ハンドリングも要求される。
【0008】
(発明の概要)
本発明の第1の目的は、ウェーハのデバイス面との接触を最小限に抑えて裏面処理のための半導体ウェーハとの係合および移送を行うことである。本発明の特定の目的は、ウェーハ周縁に隣接した除外領域、特に2mm幅を超えない除外領域にてウェーハに接触して半導体ウェーハとの係合および移送を行うことである。
【0009】
本発明の他の目的は、異なる寸法のウェーハ、特にさまざまな寸法の中で可能な200mmおよび300mm径のウェーハを保持して移送できるウェーハの保持および移送方法および装置を提供することである。
【0010】
本発明の他の目的は、ウェーハの裏面支持のためにデバイス面接触を小さくした、上述した能力のない従来技術の処理機械と共用でき、それらの処理機械を改造することのできるウェーハ保持および移送システムを提供することである。本発明のさらに特別な目的は、処理機械のハードウェアに対する影響が最小限で、処理機械の作動ソフトウェアにほとんどまたは全く影響を与えることなく、既存の処理機械に対する上述システムの改造を提供することである。
【0011】
本発明の基本によれば、ウェーハ表面の小さな面積部分にて接触してウェーハを保持できると共に、各チャック、ウェーハ・カセットおよび処理機械のウェーハ・ホルダーの間でウェーハを交換することのできるウェーハ移送アーム・チャック、センタリング・ステーション・チャックおよび装填アーム・チャックを有し、また裏面処理時にウェーハのデバイス面におけるウェーハ周縁に隣接した約2mm幅を超えないことが好ましい除外領域のみに接触することのできるウェーハ・ハンドリング・システムが提供される。
【0012】
或る実施例で、移送アームおよび装填アームのウェーハ・チャックはウェーハの直径よりも大きい直径の、斜面のある周縁リング、または周縁リング・セグメントを有する。斜面のある周縁リングは、ウェーハ周縁の狭い幅の除外領域のみがウェーハを支持するチャック上の面と接触されることを保証する。幾つかの応用例では、センタリング・ステーション・チャックもそのような斜面のある周縁リングを備えることができる。
【0013】
或る実施例で、端部操作具は移送アーム上に備えられる。端部操作具は、より高い平坦度を得るためにマルチ・ピース構造とされ、ウェーハの存在を決定するために内部の真空チャンネルを使用し、また例えば200mmおよび300mm径の異なる直径のウェーハを受入れるために調整可能なセラミックス製の張出し部分、すなわちアウトリガーを有する。
【0014】
センタリング・ステーション・チャックはウェーハの平坦さ、ウェーハの結晶軸方向およびウェーハ中心位置を正しくする。チャックはマルチ・ピース構造であることが好ましく、ウェーハの存在を検出するために真空チャンネルを使用し、チャックがウェーハを回転するときにウェーハの平坦な配向を検出するために光学式センサーを使用している。整合ステーション・チャックの表面は、端部操作具のアウトリガーがウェーハを、ホーム位置に対するチャック配向を受入れる窓内に問題無く載置または移動できるようにする空隙溝のような凹部を有する。
【0015】
装填アーム・チャックは幾つかの点で整合ステーション・チャックに似ており、移送アームと相互作用するが、ウェーハの配向を変更するために回転することはない。ウェーハの存在を判定するために真空チャンネルを使用している。装填アームは、除外領域の範囲内でウェーハ周縁をグリップする枢動可能なウェーハ周縁フックまたはグリップ部材を有する。グリップ部材は電気−空気アクチュエータで空気的に作動され、アクチュエータは以前の装填アームの真空チャックのように真空制御装置を作動させる同じ電気制御信号に応答する。装填アーム・チャックのグリップ部材は、装填アームに対するロボット式移送アームの動き、または処理機械のウェーハ・ホルダーに対する装填アームの動きに落として作動される。グリップ部材は枢動するグリップ・フックとされるか、その枢動グリップ・フックの代わりに他の形式のウェーハ保持装置、例えば説明した従来技術の枢動ローラーまたは非接触タブを有するラッチに似た回転式ラッチとされて、装填アーム・チャックに対してウェーハをラッチ固定するためにウェーハ周縁の上に回転することができる。グリップ部材は装填アームがウェーハを垂直に配向して、または下に向けて保持できるようにし、また幾つかの他の異なる配向で保持または移動することができる。
【0016】
本発明の或る実施例では、真空チャックを備えたシステムは機械的ウェーハ係合チャックにより、特に移送アームの端部操作具、ウェーハセンタリングまたは整合ステーションおよびウェーハ装填アームの真空チャックを交換することで改造できる。そのようなシステムでは、移送アームは水平に配置されているウェーハをピックアップして移動するように作動でき、それらのウェーハをウェーハ・カセット、センタリングまたは整合ステーション、および装填アームに向かう方向またはそこから離れる方向へ移送することができる。また、センタリングまたは整合ステーションのチャックは移送アームからウェーハを受取り、ウェーハを配向および整合し、同様に水平配向状態で移送アームの中央の配向位置へウェーハを戻すように作動できる。さらに、装填アーム・チャックは移送アーム・チャックとウェーハ処理機械のウェーハ・ホルダーとの間でウェーハを移動し、または互いにウェーハを交換し、移送アーム上での水平配向状態と処理機械のウェーハ・ホルダーでの垂直配向状態との間でウェーハを再配向するように作動できる。ウェーハは少なくとも部分的に重力によって、移送アームおよび整合ステーションの水平配置されて上に向けられたチャックの上に保持され、また移送アームに向かう方向およびそこから離れる方向のアームの移動時には、水平に配置されて上に向けられた装填アーム・チャックの上に部分的に重力により保持され、他の配向状態で移動されるときは積極的に周縁グリップ・フックによって保持される。
【0017】
本発明の或る実施例では、ウェーハ・ハンドリング・システムの制御装置は真空チャックを備えた従来技術の機械の制御装置と共用でき、従ってこのシステムは実質的なハードウェアの変更なしに、また機械の制御ソフトウェアを改良することなしにその機械を改造することができる。真空チャック制御ラインはチャック上のウェーハの存在を検出するために使用される。グリップ装置を作動させる空気シリンダは電気−空気式ソレノイドによって作動され、このソレノイドは真空チャックを作動するために与えられる電気的なソフトウェアの真空指令信号によって制御される。
【0018】
本発明の実施例は改造キットとして提供することができ、そのキットは既存の処理機械の移送アーム、整合ステーションおよび装填アームの真空チャックと交換するように構成された3つのチャック組立体を含む。
【0019】
本発明の方法および装置は、ウェーハの有効面積を約4%ほど増大させ、またはウェーハ面積の88%から96%に増大させ、ウェーハの除外領域すなわち使用できない面積を3分の2まで減少させ、ウェーハ1つ当たり製造できるデバイス数を平均して同様に増大し、これにより半導体製造工程および機械の生産性を向上させるという利益を与える。
【0020】
本発明の他の目的および利点は以下の詳細な説明からさらに容易に明白となるであろう。
【0021】
(詳細な説明)
本発明の実施例は、従来技術を表す図1に模式的に示したような半導体ウェーハ・ハンドリングおよび処理装置100である。この装置100は米国特許第4915564号または同第5516732号に図示され説明されている形式の高生産性のカルーセル形式の垂直ウェーハ処理機械10を含み、両特許は本明細書にその記載内容全体を援用される。本発明はまた他の型式のウェーハ処理機械、例えば典型的なクラスター・ツール形式の機械、およびウェーハが全体を通じて水平および上方に向かって配置されて保持される他の機械、ならびにウェーハが他の配向で機械を通して移動または処理される機械にも適用できる。しかしながら、記載された実施例は、特に改造することで本明細書で説明した装置100の形式の機械に特に適している。
【0022】
装置100は二点鎖線で示す框体102を含み、框体は内部にクリーンな雰囲気を収容しており、その中に処理機械10が配置される。框体102は内部に2つのウェーハ・カセット103,104を支持する備えを含んでおり、ウェーハ・カセット103,104は機械10で処理を行うために間隔を隔てて平行な状態で水平に配向されているウェーハ35の垂直スタックを支持するように形成された棚105をそれぞれ含んでいる。ウェーハ・カセット103,104はそれ自体を垂直方向へ移動させる昇降機構106を備えており、棚の各々のウェーハ位置を選択的に移送面へ運び、内部のウェーハ35の取出し、またはカセットの選択した位置への装填ができるようになされている。
【0023】
框体102はまた内部にウェーハ移送機構110を有し、ウェーハ移送機構110はウェーハ移送アーム112を有し、このウェーハ移送アーム112は垂直な枢動軸線115のまわりに回転できると共に、移送面119内を伸長することができる。移送アーム112の自由端には、ウェーハ・カセット103,104に対し、またウェーハ・センタリングまたは整合ステーション118のセンタリング・チャック116および装填アーム60の端部の装填アーム・チャック59に対してウェーハ35のピックアップおよび載置を行うグリップ装置すなわち端部操作具114が備えられている。ウェーハ・カセット103,104、センタリング・チャック116および装填アーム・チャック59は移送アーム112の枢動軸線115のまわりに円形曲線117に沿って位置され、または位置されることができる。装填アーム・チャック59は装填アーム60の長手方向軸線121のまわりに回転して、保持するウェーハ35を、移送アーム112との間のウェーハ移送に必要な水平配向状態と、ウェーハ処理機械10の装填ロック・ステーション14におけるウェーハ・ホルダー30(図2)へ向かう方向および離れる方向のウェーハ移送に必要な垂直配向状態との間で、回転させる。装填アーム60はさらに垂直軸線122のまわりに枢動して、装填ロック・ステーション14におけるウェーハ・ホルダー30へ向かう方向および離れる方向のウェーハ移送を行う。
【0024】
ウェーハ処理機械10は主真空室11を含み、この主真空室11は水平中心軸線19のまわりに等角度に隔てられた複数、例えば5つのステーション14〜18を有する2つのほぼ円形な壁12,13の間に形成されたディスク形の空間とされている。真空室11内には、処理ステーション14〜18の各々と同時に整合するように等間隔に隔てられた5つの円形開口21を有する円形の割出しプレート20が軸線19に回転移動可能に取付けられている。
【0025】
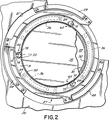
図2に示すように、各開口21内には、割出しプレート20に連結された3つの等角度に隔てられている板ばね28上に弾性的に支持されてシール・リング27が備えられている。各々のシール・リング27内には、3つで1組のセラミックス製の絶縁ピン29上でシール・リング27に対して剛的に支持されてウェーハ・ホルダー30が備えられている。ウェーハ・ホルダー30は、割出しプレート20が5分の1回転、すなわち72゜の角度を割出されたときに各処理ステーション14〜18を通してウェーハ35を運ぶためにそれぞれ備えられている。5つのステーション14〜18のうちの少なくとも1つのステーション、例えばステーション14は装填ロック・ステーションとされ、そのステーションを通してウェーハ35が主真空室11内へ挿入され、また主真空室11から取出される。残りのステーション15〜18は、例えばスパッタ被覆ステーションやエッチング・ステーションのような多数の形式のうちの何れかの処理ステーションとされる。
【0026】
ウェーハ・ホルダー30の各々の主構造は、典型的にはアルミニウムで形成されたリング形の環状本体31である。本体31はクランプ・リング32を有しており、このクランプ・リング32は本体31に対して弾性的に取付けられ、3つで1組の等角度に隔てられた板ばね36によって本体に押圧されている。クランプ・リング32はクランプされるウェーハ35よりも僅かに小さい内径を有する。ウェーハ35は、その周縁の上に位置するクランプ・リング32によって本体31の開口39内に保持される。板ばね36はクランプ・リング32およびウェーハ35を3つで1組のラッチ・クリップ33に押圧するのであり、ラッチ・クリップ33は開口21のまわりに等角度に隔てられた3つのラッチ組立体65のそれぞれの1つである。
【0027】
ラッチ組立体65は多数の形状のうちの何れか1つとされる。図2に示す組立体は、ホルダー本体31のまわりに間隔を隔てて枢動可能に取付けられた、米国特許第5820329号に記載の形式のものである。図2に示すように、ラッチ・クリップ33は一端が枢動軸70の一端に固定され、枢動軸70はホルダー30の本体31を通って延在する軸受(図示せず)内に回転可能に支持される。枢動軸70のクリップ33と反対側の端で、軸は円形ディスク74に剛的に連結されており、円形ディスク74は一対の穴75を有し、円形ディスク74の後方へ向いた面にはフレアーの付いた開口を有する。穴75は軸70の反対両側に同じ距離を隔てられ、装填アーム60のアクチュエータ(図3)のピン62を受入れるようになされて、これによりアクチュエータの回転が円形ディスク74、軸70およびクリップ33を軸70の軸線のまわりに回転させる。軸70の円形ディスク74の回転は90゜の回転移動に制限される。ラッチ組立体65を有するホルダー30の装填では、ウェーハ35はクランプ・リング32に対して押圧されてウェーハ本体31から離すようにそれを移動し、これによりウェーハ33の表面を擦ることなくラッチ・クリップ33はラッチ固定された位置(二点鎖線)とラッチ固定されていない位置(実線)との間で回転できる。
【0028】
代替のラッチ組立体65aが図2Aに示されており、これは本明細書にその記載内容全体を援用される米国特許出願第09/183503号に記載されたものである。ラッチ組立体65aは上述したラッチ組立体65と同様に、ウェーハを保持するクランプ・リング32の開口39のまわりでウェーハ35の周縁をクランプ・リング32に対して押圧する。しかしながら、各ラッチ組立体65aはホルダー本体31に対するよりもクランプ・リング32に対して枢動可能に取付けられる。ラッチ組立体65aはクランプ・リング32に固定されている取付けポスト130に取付けられる。ラッチ組立体65aは、タングステン・カーバイド製ボール軸受(図示せず)を介して取付けポスト130に枢動可能に取付けられている非金属製のラッチ本体131を含み、取付けポスト130を取巻くコイルばね(図示せず)によってクランプ・リング32に押圧される。ラッチ本体131の各々はラッチ組立体65に関連して上述した穴75に似た一対のアクチュエータ・ピン受入れ穴またはスロット175を有し、それらは取付けポスト130から等しく隔てられて移送アームのアクチュエータ機構のアクチュエータ・ピンを受入れるようになされており、以下に説明するようにラッチ組立体65aを作動させる。ラッチ本体131の反対両端には、前部ローラー135および後部ローラー136で構成される一対の非金属製のローラーが回転可能に取付けられている。
【0029】
図3は処理機械10を通り、装填ロック・ステーション14を通る断面図である。
【0030】
装填ロック・ステーション14は移動可能なカップ型の蓋54を含み、この蓋は装填ロック・ステーション14に密閉される装填ロック室55を形成するために、真空室11の前壁12にシール・リング27を押圧するように作動される。扉56は、移送アームまたは装填アーム60の真空チャック59で担持されたウェーハ35へのアクセスを行わせる。
【0031】
半導体デバイスの製造では、装填アーム60はデバイス面を先ず最初にホルダー本体31の開口を通して装填ロック室55内へウェーハ35を移送するように作動し、ウェーハ35の外側リムをクランプ作用するクランプ・リング32の下側に接触させる。デバイス面の処理のために、装填アーム・チャックは円形チャック59aとされ、このチャックはウェーハ35の裏面の中央に係合される。真空チャック59aは装填アーム60の真空ライン69を通して、選択的に作動できる真空源に連結される。
【0032】
ウェーハ上に金のような金属製の連続フィルムを固着させるために裏面の金属処理が実行される場合のように、ウェーハ35の裏面を処理するとき、ウェーハは反転され、チャック59,114,116が装置側からウェーハ35に係合される。チャックとウェーハ上のデバイスとの接触はそれらのデバイスの破損や破壊を防止するために避けねばならないので、ウェーハ35の予定された、すなわち制限された面積部分にデバイスを制限して、ウェーハ表面の除外領域にデバイスが配置されることを避けることが必要である。除外領域は従来よりウェーハ周縁に沿う6mm幅のウェーハの面積部分とされてきた。この除外面積部分では、図3Aに示すように弧状真空チャック59bがウェーハ35の周縁の除外面積部分に対してのみ接触する。チャックのパドルまたはウェーハ係合端部は、ウェーハ周縁に沿う6mm幅のリングの円周の大部分のまわりを延在することが好ましい。
【0033】
ホルダー30に対するウェーハ35の挿入は、ウェーハ35の移動路の外側へラッチ・クリップ33が回転されて行われる。ウェーハ35の後方位置へ、また後方位置からのラッチ・クリップ33の回転は、図3に示されるように、移送アームまたは装填アーム60によって担持されている3つのラッチ・アクチュエータ61で達成される。それぞれのラッチ・アクチュエータ61は空気的に作動される回転式シリンダ63の軸に一対のアクチュエータ・ピン62を含み、ピン62がホルダー30の3つのラッチ組立体65の対応する1つと係合したときに一方向へ90゜回転して、同時に3つのクリップ33をウェーハ35の後方のラッチング位置へ移動させ、また反対方向へ90゜回転してウェーハ35のリムを超えたホルダーの解放位置へクリップ33を移動させる。
【0034】
本発明の基本によれば、装置100のようなウェーハ・ハンドリングおよび処理装置は、図1に関連して説明した装置100のウェーハ移送機構110に類似したウェーハ移送機構210を備えているているが、ウェーハ・ハンドリング・システム200を備えており、図4に一実施例が示されている。システム200は3つのチャックおよび関連するハードウェアを含み、それには移送アーム・チャックまたは上述した移送アーム112のように作動する移送アーム212の端部に配置された端部操作具201が含まれる。システム200はまた、ウェーハ整合ステーション118に上述したセンタリング・チャック116のように作動するセンタリング・チャック216と、上述した装填アーム60のように作動する装填アーム260の端部に一対の装填アーム・チャック259を含む。
【0035】
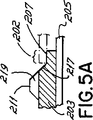
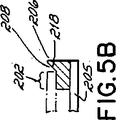
端部操作具201はウェーハ35のデバイス面の周縁の2mm幅の除外領域のみにおいて水平配置されているウェーハ35の下に向いたデバイス面と接触するウェーハ支持面を含む。ウェーハ35は重力の作用で端部操作具201上に係止され、端部操作具201はウェーハ・カセット103,104に向かう方向および離れる方向、整合ステーション118のセンタリング・チャック216に向かう方向および離れる方向、および装填アーム260の装填アーム・チャック259に向かう方向および離れる方向へウェーハ35を移動させるために移動する。図5、図5A〜図5Dは、ねじ204で移送アーム212の端部に固定された移送アーム・プレート203の形態をした本体と、ロッキング・ワッシャ・ナット211で保持されたときに、移送アーム・プレート203の鳩尾形(ダブテール)キー溝(図示せず)に嵌合させてそのプレート203に剛的に取付けられた台形断面の一対のアウトリガー・アーム205とを含む。アウトリガー205は異なる寸法のウェーハを受入れるために、キー溝内で調整できる。アーム205はセラミックス製で、直立した支持先端206を有し、その先端は移送アーム212によって移送されるウェーハ35の除外面積部分202に接触する。プレート203および先端206は除外面積部分202にてウェーハ35を支持するために形成された環状ショルダのセグメント207,208をそれぞれ有する。ショルダ・セグメント207,208に直ぐ隣接して、斜面を有する環状リップの角度間隔を隔てた、すなわち円周方向に隔てられたセグメント217,218がそれぞれ配置され、セグメント217,218は移送アーム212で担持されているウェーハ35の周縁を直接に取囲んでいる。ナット211はセグメント217に対して接線方向に配置され、斜面の付いたリップ伸長部分を形成する円錐ヘッド面219を有して、リップと共にウェーハをショルダ・セグメント207,208へガイドするように作用する。
【0036】
斜面の付いた円周リップのセグメント217,218、およびピン・ヘッド面219は、ウェーハ周縁がリップを超えて係止されず、端部操作具201上の中心の直近にウェーハが支持されるように作用する。斜面の内径は、ウェーハ35の除外領域202の係止される幅が2mmよりも小さいショルダ・セグメント207,208の環状面を取囲む。斜面のこの内径は、標準ウェーハの基準直径、典型的には200mmまたは300mmに、約0.008inすなわち約0.2mmの半径方向の最大公差を加えた寸法に等しく、従って最大ウェーハは斜面の付いた環状リップの内側に係止されることになる。アウトリガー205はワッシャ・ナット211により部分的にプレート202に固定される。ナット211のヘッド219の円錐側面はプレート203の上面よりも上方へセグメント217,218の斜面を伸長して、ウェーハ35がカセット103,104からピックアップされるときに、斜面の付いたリップのセグメント217,218で囲まれる円形面積部分上へウェーハ35をガイドするように助成する。チャックの斜面は、チャックの支持面よりも少なくともウェーハの基準厚さ、好ましくは約1mmほど高く上昇する。斜面の角度は好ましくは約45゜±10゜または±15゜である。斜面はいずれにしても支持面を囲むべきではなく、180゜を超えた範囲にわたる複数点、好ましくは3点以上、好ましくは4点に位置されることができる。ウェーハの取出しおよび交換のために、アウトリガー205はカセット103,104内で重ねられたウェーハ35の間に達するように十分薄くされる。
【0037】
図5に示されるように、アウトリガー205はセンタリング・ステーション118でのセンタリング・チャック216の表面の溝221,222に嵌合する寸法でもある。センタリング・チャック216は低いディスク形の本体216aとセグメントに分けられた直立周縁リング223とを有し、周縁リング223は端部操作具201からウェーハ35を受取るために半円形であり、端部操作具201は、ウェーハ35の平坦部またはノッチ235(図5)をセンタリング・チャック216上の平坦部224と同じ所定の配向になるように移動させるために、ウェーハを上昇および回転させることができる。周縁リング223は移送アーム・チャックの場合と同様に、ウェーハをその除外面積部分内のみでチャックの支持面に接触するようにガイドするために斜面を形成されることができるが、斜面の無い方がセンタリング機構とよりよく共用でき、機能する。図示実施例では、センタリング・ステーションの周縁リング223はウェーハ平面に直角な内面を有する。センタリング・ステーションではセンタリング・チャック216上の光学センサー(図示せず)がウェーハの配向を判定する。
【0038】
同様に図5に示されるように、装填アーム・チャック259の各々は端部操作具201のアウトリガー205を受入れるために溝262,263を有するチャック・プレートまたは本体261を有する。チャック装填アーム・チャック259は図3Aのデバイス面と係合する真空チャック59bに代わる。プレート261はその周縁のまわりにセグメントに分割された直立環状リップ265を有し、その上にウェーハ35の周縁に沿う除外領域が係止される。リップ265は上述した移送アーム・チャックおよびセンタリング・ステーション・チャックの場合と同様に、デバイス面の接触が2mmを超えない幅の除外領域とだけで行われることを保証するために斜面を形成される。
【0039】
図6、図7、図7Aおよび図8に示されるように、リップ265のまわりに間隔を隔てて複数の、例えば2〜4つのグリップ装置またはグリップ・フィンガ270が配置され、各々のグリップ・フィンガは装填アーム・チャック259の本体261に対して軸受で支持されたロッド281に枢動可能に取付けられている。各々のグリップ装置270はウェーハ35の周縁を捕捉するためにノッチ273を有している。各々のグリップ装置270は装填アーム・チャック259に取付けられているアクチュエータ272で制御される作動レバー271を有しており、従来技術のシステムの真空チャック59,59aを作動させるような真空圧制御のためにライン69を通して与えられる真空圧指令に応答して作動するが、それらのチャックは取外されて機械的な装填アーム・チャック259と交換されている。アクチュエータ272は電気的または空気的に制御される空気シリンダ、電気−機械式ソレノイド、または図7および図7Aの解放位置とグリップ位置との間でグリップ装置270を移動させる他のいずれかの装置とされる。さらに、図8に最もよく見られるように、チャック259に適当に装着されたウェーハ35を検出するために、リップ265の一連の穴(図示せず)に連結するために真空ポート295がチャック本体261に備えられる。
【0040】
アクチュエータ272は、装填アーム・チャック259の本体261に固定された本体282と、可動部材283とを有し、グリップ装置270が解放位置となる本体261の近傍の収縮位置(図7)およびグリップ装置270がグリップ位置となる本体261から離れた伸長位置(図7A)の間で可動部材283は本体261に対して直角な方向に往復運動する。アクチュエータ272の可動部材283の端部にアクチュエータ・バー284が固定されており、アクチュエータ・バー284は本体261に平行に延在して可動部材283と共に移動する。各々のグリップ装置270の作動レバー271はフォーク285を有しており、調整可能なセット・スクリュー286が螺合されている。このセット・スクリューは貫通孔287を有し、貫通孔287の中に柔らかなばね288がフック止めされ、このばね288はセット・スクリュー286とアクチュエータ・バー284の遠隔端部との間に緊張状態で連結されている。ばね288は、チャック259のリップ265に対してウェーハ35をクランプするにおいて、グリップ装置270でウェーハ35の裏面に伝えることのできる力の大きさを制限するように機能する。セット・スクリュー286は、この制限が手動調整できるようにするために備えられる。各々の作動レバー271はそこから延在するリンク289も有しており、それらのリンクは互いに遠隔端部において、一方の端部の軸受291上を端部のフォーク290が枢動および滑動するような状態で枢動連結されている。リンク289の端部の相互連結はグリップ装置270の動作を同期させる。
【0041】
グリップ装置270の代わりに、ウェーハを装填アームにラッチ固定するために他の部材を使用できる。例えば、上述で記載し援用した従来技術に関連して説明したようなローラーまたはフィンガを有する回転ラッチが使用できる。これらは空気作動アクチュエータ61または機械的または他の装置で作動できる。
【0042】
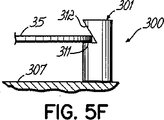
例えば、図5Eは装填アーム・チャック259に対する代替実施例300を示しており、それは1つの固定ピン301および2つのローラー302を含む3つの周縁支持部に対するウェーハ35の支持を使用している。この実施例の装填アーム・チャック300は図5に示した実施例の周縁平坦部235が無く、装填アーム・チャック300mm径のウェーハを支持するために構成された形状で示されている。この代わりに、固定ピン301およびローラー302を省略するために平坦部またはノッチを有するウェーハ35をチャック300上に配置できる。チャック装填アーム・チャック300は装填アーム・チャックまたはセンタリング・ステーション・チャックとして使用できる。チャック300はウェーハ35の周縁上の3以上の点で接触でき、例えばハウジング307を含み、このハウジングに固定ピン301および一対の凹部またはノッチのあるローラー302が取付けられる。ローラー302はウェーハ35の周縁に対してラッチ固定するように、またその周縁から引込められるようにハウジング307に取付けられる。ローラーが引込められた位置にあって固定ピン301に対しているとき、2つのローラー302の間をウェーハ周縁を押し進めることで移送アーム・チャックまたは端部操作具201がウェーハ35をチャック300へ導けるように、チャック300は構成される。ローラー302は固定ピン301からチャック300の中心線303の反対両側に配置されており、ローラーは、少なくとも160゜離されることが好ましいが、180゜未満の離れとされる角度304で隔てられている。160゜未満の角度は、端部操作具201の設計上の理由で受け入れることができない。
【0043】
チャック300が上に向いているとき、例えば図5Fに示されるように2mm幅の除外領域の範囲内でのみウェーハ35と接触してウェーハ35周縁を支持するために、固定ピン301は水平面311を有する。固定ピン301は重なって傾斜したほぼ垂直な面312を有し、この面はウェーハ35の中心へ向かって半径方向内方へ向いている。ローラー302はアクチュエータ61動作に応答してウェーハ35の周縁から離れた引込んだ位置と、図5Eに示されるようにウェーハ35の周縁に対するラッチ固定位置と間を揺動するように、枢動レバー302aに取付けられる。この代わりに、上述で説明した実施例のグリップ・フィンガ270のためのアクチュエータ272の場合のように、真空チャックを制御するために以前使用されていた信号に応答する他のアクチュエータに応答してローラー302が枢動されるようにできる。ローラー302はラッチ固定位置にされたときにウェーハ35の周縁を捕捉するために滑らかな凹面315を有しており、その位置にてウェーハ35は端部操作具201からピックアップされる。ローラー302の凹面315および組合う固定ピン301の傾斜面312および水平面311がチャック300上のウェーハ35を捕捉し、これによりウェーハ35は垂直位置または下方へ向いた配向となるように回転されることができ、またウェーハ・ホルダー30に向かう方向および離れる方向へ移送されることができる。
【0044】
装填アーム・チャックはウェーハ処理機械にウェーハを正しく載置する。このように処理機械の装填ロック室の真空式ウェーハ・ホルダー30内へ位置された後、グリップ装置またはラッチがウェーハを解放すると同時に、ウェーハ・ホルダーがウェーハを把持する。装填ロック室からウェーハを取出すためには、これと逆の手順が使用される。装填アーム・チャックがウェーハ・ホルダーから引出されると、処理機械は次のウェーハ・ホルダーを装填ロック室に割出すことができる。装填アームの2つのチャックにより、装填アームは装填ロック室のウェーハ・ホルダー内にウェーハが存在するかを調べ、存在するならば、そのウェーハを装填アームの空のチャックで取出す。その後、装填アームは180゜回転して新しいウェーハを所定位置に運んで装填ロック室のウェーハ・ホルダー内に装填する。装填ロック室へウェーハを載置したチャックは、その後、装填アームの他方のチャックの処理済みウェーハを端部操作具へ移送するために180゜回転する前に、移送アームの端部操作具から次のウェーハを受取るために使用できる。
【0045】
上述の記載および添付図面は本発明のさまざまな実施例を説明したが、当業者には発明の基本から逸脱することなくさらなる追加および変更が行えることが明白となるであろう。
【図面の簡単な説明】
【図1】 本発明を適用できる従来技術のウェーハ・ハンドリングおよび処理装置を示す斜視図である。
【図1A】 チャック組立体の動作を示す図1の一部分の拡大斜視図である。
【図2】 図1の装置のカルーセル処理機械の従来技術のウェーハ・ホルダーを示す部分的破断図である。
【図2A】 ラッチ固定位置で示される図2のラッチの従来技術の代替実施例を示す詳細図である。
【図3】 従来技術の装置のウェーハ移送アームに関する図1の従来技術の装置のカルーセル処理機械の一部分を通る断面図である。
【図3A】 裏面処理のための従来技術で使用された図3の移送アームの真空チャックの1つの実施例の斜視図である。
【図4】 図1〜図3Aに示した従来技術の装置と共用される本発明の1つの実施例によるウェーハ・ハンドリング・システムの斜視図である。
【図5】 整合ステーションおよび装填アームのウェーハ・チャックと整合された、図4のウェーハ・ハンドリング・システムのウェーハ移送アームの端部操作具の模式的な頂面図である。
【図5A】 図5の線5A−5Aに沿う断面図である。
【図5B】 図5の線5B−5Bに沿う断面図である。
【図5C】 図5の線5C−5Cに沿う断面図である。
【図5D】 図5の線5D−5Dに沿う断面図である。
【図5E】 装填アーム・チャックの他の実施例にウェーハを位置決めするウェーハ移送アームの端部操作具を示す図5に類似の模式的な頂面図である。
【図5F】 図5Eの線5F−5Fに沿う断面図である。
【図5G】 図5Eの線5G−5Gに沿う模式的な断面図である。
【図6】 図5の装填アーム・チャックのグリップ装置の部分的な頂面図である。
【図7】 解放位置での装填アーム・チャックのグリップ装置を示す図6の線7−7に沿う横断面図である。
【図7A】 ウェーハをグリップする装填アーム・チャックのグリップ装置を示す図7に似た断面図である。
【図8】 図7Aの装填アーム・チャックのグリップ装置をさらに詳細に示す拡大した部分的な断面図である。
Claims (24)
- 片面のデバイス面と、或る直径と、一般に円形の周縁と、ハンドリング・システムによるデバイス面の接触を制限しなければならない周縁に隣接したデバイス面上の除外面積部分(202)とを有する半導体ウェーハ(35)を、裏面処理のためにウェーハ処理機械内のカセットと室の間で移送することが特に可能な半導体ウェーハ・ハンドリング・システム(200)で、一平面内に配置されてウェーハ(35)の直径と少なくとも同じ大きさの外径を有する環状リングのセグメントで形成されたウェーハ支持面(207,208,265)と、各セグメント上の環状リングの外径に隣接した支持面から外方へ延在し、ウェーハの周縁を支持面(207,208,265)へガイドするために、またチャックの支持面および除外面積部分(202)以外のウェーハの接触を防止するために位置決めされている斜面とを含む半導体ウェーハ・ハンドリング・システム(200)であって、除外面積部分(202)が2mmを超えない幅であり、環状リングの内径は2mmを超えない寸法を減じたウェーハの半径に等しいこと、斜面が少なくとも複数の角度を隔てられたセクション(217,218)に備えられていること、システムが水平で裏面を上にした配向にてカセットと装填アーム・チャック(259)との間でウェーハ(35)を移動させる移送アーム・チャック(201)および室内の垂直面内にて移送アーム・チャック(201)とウェーハ・ホルダーとの間でウェーハを移動させる装填アーム・チャック(259)を含むこと、移送アーム・チャック(201)の斜面が少なくとも2つの離れた点で斜面の上を延在する面(219)を含むこと、そして移送アーム・チャックおよび装填アーム・チャック(201,259)の間でウェーハ(35)を移送するためにそれらのチャックが互いに整合されたとき、両チャックのウェーハ支持面のセグメントが同じ環状リングの異なる部分に位置され、斜面の角度間隔を隔てられているセクション(217,218)が同じ環状リングの外径に隣接して位置されることを特徴とする半導体ウェーハ・ハンドリング・システム。
- 移送アーム・チャックのウェーハ支持面(207,208)が水平面内に配置されて上に向けられており、移送アーム・チャックは機械のロボット式ウェーハ移送アームの端部に取付けられるように構成された本体(203)を含み、本体は環状リングの少なくとも1つのセグメントおよびそこから延在する少なくとも2つのアーム(205)を有し、各アーム(205)は環状リングの少なくとも1つのセグメントを有する遠隔端部を有しており、移送アーム・チャックの斜面は本体(203)およびアーム(205)の端部の各々の少なくとも1つのセクション上の支持面(207,208)の外径位置から上方へ延在しており、これにより半導体ウェーハ・ハンドリング・システムが移送アームの端部の移送アーム・チャックにより、デバイス面を下に向けた半導体ウェーハ(35)を、その除外面積部分(202)がアームの本体および端部上の支持面のセクションと支持面(207,208)の各々のセクションに隣接したウェーハの直径よりも外側の斜面とに面接触させて、ピックアップおよび重力により支持するように作動できることを特徴とする請求項1に記載されたシステム。
- 移送アーム・チャック(201)のウェーハ支持面(207,208)が水平面内に配置されて上に向けられ、斜面が支持面(207,208)の外径から上方且つ外方へ延在し、移送アーム・チャックがデバイス面を下に向けた半導体ウェーハを、その除外面積部分(202)が支持面のセクションおよび支持面のセクションの各々に隣接するウェーハの直径よりも外側の斜面と面接触してピックアップおよび重力で支持し、これによりウェーハのデバイス面と支持面との接触をウェーハの除外面積部分(202)に制限することを特徴とする請求項1に記載されたシステム。
- ウェーハの除外面積部分(202)で遮断されるように支持面(207,208)上に配置された真空ポートを移送アーム・チャックが含み、ウェーハ存在検出器に連結されたときにその検出器を作動させるようになされている請求項3に記載されたシステム。
- 一平面内に配置され、ウェーハの直径と少なくとも同じ大きさの外径と、ウェーハの半径よりも2mmを超えない範囲で小さい内径とを有する環状リングのセグメントで形成されたウェーハ支持面(223)を有する整合ステーション・チャック(216)をさらに含む請求項1から請求項4までのいずれか一項に記載されたシステム。
- 整合ステーション・チャック(216)が、少なくとも複数の角度間隔を隔てたセクションにてその支持面(223)の外径位置から延在し、ウェーハの周縁を支持面上へガイドするため、およびチャックの支持面と除外面積部分以外のウェーハ部分との接触を防止するために配置された斜面を有する請求項5に記載されたシステム。
- 整合ステーション・チャック(216)のウェーハ支持面(223)が水平面内に配置されて上に向けられ、整合ステーション・チャック(216)は機械のウェーハ整合装置に取付けられるように構成されると共に、その支持面(232)の2つのセクションの間に配置された少なくとも1つの凹部(222)を有することでウェーハと整合ステーション・チャックとの間を移送アーム・チャック(201)が伸長して整合ステーション・チャックにウェーハを載置できるように、またはそこからウェーハをピックアップできるようにしており、これによりウェーハ整合チャック(216)が、デバイス面を下に向けた半導体ウェーハ(35)の除外面積部分をウェーハ整合チャック上の支持面のセクションに面接触させて、ウェーハを整合のために重力で支持するように、および移送アーム・チャック(201)によりピックアップするように作動可能である請求項5に記載されたシステム。
- 少なくとも複数の角度間隔を隔てたセクションにおいて支持面の外径位置から延在し、ウェーハの周縁を支持面上へガイドするように、およびチャックの支持面と除外面積部分以外のウェーハ部分との接触を防止するように配置されている斜面を整合ステーション・チャック(216)が有しており、整合ステーション・チャックの斜面は、整合ステーション・チャックの支持面のセクション上で、整合ステーション・チャックの支持面の外径から上方へ延在して、これにより支持面のセクションの各々に隣接するウェーハの直径よりも外側の整合ステーション・チャックの斜面によって半導体ウェーハを支持するようにウェーハ整合チャックが作動可能である請求項7に記載されたシステム。
- 装填アーム・チャック(259)が機械のウェーハ移送アーム上に取付けられるように構成されると共に支持面の2つのセクションの間に配置された少なくとも1つの凹部(263)を有しており、装填アーム・チャック(259)のウェーハ支持面(265)が水平面内に位置されて上に向けられているとき、移送アーム・チャック(201)が装填アーム・チャック(259)の上に向いた支持面(265)に支持されているウェーハ(35)と装填アーム・チャックとの間を伸長してウェーハを装填アーム・チャック上に載置し、またはそこからウェーハをピックアップできるようにするために前記凹部が構成されており、装填アーム・チャックの斜面は装填アーム・チャックの支持面(265)の外径位置から上方へ延在しており、また装填アーム・チャックは1組の可動ロッキング部材(270)を含み、これらのロッキング部材は係合されたときには装填アーム・チャックの支持面にウェーハをクランプするために除外面積部分(202)と反対側のウェーハの裏面に対して移動するように、また係合解除されたときにはウェーハを解放するように作動可能であり、これによりロッキング部材が係合解除されたとき、デバイス面を下に向け、除外面積部分を装填アーム・チャックの支持面のセクション、および支持面の各々のセクションに隣接するウェーハの直径よりも外側の斜面に面接触させて半導体ウェーハ(35)を重力によって支持するように装填アーム・チャック(265)が作動可能である請求項1から請求項8までのいずれか一項に記載されたシステム。
- デバイス面と、裏面と、或る直径と、一般に円形の周縁とを有する半導体ウェーハ(35)を、デバイス面上の周縁に隣接する2mmを超えない幅の除外面積部分(202)だけでウェーハに接触して移送することのできるウェーハ・ハンドリング装置であって、水平に配置したウェーハの重ねられた垂直スタックを保持するための少なくとも1つのウェーハ・カセット・ステーションと、ウェーハ保持装置を備えた装填ステーションを有するウェーハ処理機械(11)と、装填ステーションにおけるウェーハ・ホルダーおよび移送位置における水平配向状態の間でウェーハを移動させる装填アーム(60)と、ウェーハ・カセット・ステーションおよびセンタリング・ステーションにおけるウェーハ・カセットと装填アームの移送位置との間で水平配向状態のウェーハを個々に移動させるロボット式移送アーム(112)とを含むウェーハ・ハンドリング装置を製造する方法であって、少なくとも2つのウェーハ・チャック(201,259)をロボット式移送アーム(112)および装填アーム(60)の各々に少なくとも1つ取付けることを含み、各チャックは、一平面内に配置されると共にウェーハの直径と少なくとも同じ大きさの外径および2mmを超えない寸法を減じたウェーハの半径に等しい内径を有する環状リングのセグメントで形成されたウェーハ支持面と、少なくとも複数の角度間隔を隔てたセクションにおける支持面の外径位置から延在し、ウェーハ(35)の周縁を支持面(207,208,265)へガイドするように、またチャックの支持面および除外面積部分(202)以外のウェーハ部分の接触を防止するために配置された斜面とを含んでいるウェーハ・ハンドリング装置を製造する方法。
- ロボット式移送アーム(112)および装填アーム(60)の少なくとも1つが真空チャックを有しており、取付けられたウェーハ・チャックの少なくとも1つが環状リングのセグメントに真空ポート(295)を有しており、ウェーハ・チャックの取付けが、真空チャックの1つから真空制御ラインを接続解除してその真空制御ラインを前記ウェーハ・チャックの前記ポートに再接続することによる少なくとも1つのチャックの取付けを含む請求項10に記載された方法。
- ウェーハ存在検出器を作動させるために装置の真空制御ラインの再接続を使用することをさらに含む請求項10に記載された方法。
- ロボット式移送アームおよび装填アームの少なくとも1つが真空チャックを有しており、少なくとも1つのウェーハ・チャック(201,259)が環状リングのセグメントに対してウェーハを保持するためにラッチング部材(270)を有しており、少なくとも1つのウェーハ・チャック(201,259)の取付けが、1つの真空チャックから制御ラインを接続解除し、その真空制御ラインを前記ラッチング部材(270)に再接続することを含む請求項10から請求項12までのいずれか一項に記載された方法。
- 装填アーム(60)が真空チャックを有しており、少なくとも1つのウェーハ・チャックが環状リングのセグメントに対してウェーハを保持するためにラッチング部材(270)を有しており、少なくとも1つのウェーハ・チャック(201,259)の取付けが、装填アームの真空チャックから制御ラインを接続解除し、その真空制御ラインを前記ラッチング部材(270)に再接続することを含む請求項10から請求項12までのいずれか一項に記載された方法。
- 装填アームが真空チャックを有しており、少なくとも2つのウェーハ・チャック(201,259)が環状リングのセグメントに対してウェーハを保持するためにラッチング部材(270)を有しており、装填アームに対するウェーハ・チャックの取付けが、装填アームの各々の真空チャックを少なくとも2つのウェーハ・チャックの1つと交換し、装填アームの真空チャックの各々から真空制御ラインを接続解除し、それぞれの真空制御ラインを少なくとも2つのウェーハ・チャックのそれぞれのラッチング部材に再接続することを含む請求項10から請求項12までのいずれか一項に記載された方法。
- 装置がその水平面内に配置されたウェーハを再配向させるための整合およびセンタリング・ステーションも有しており、一平面内に配置され、ウェーハの直径と少なくとも同じ大きさの外径と、ウェーハの直径よりも2mmを超えない範囲で小さい内径とを有する環状リングのセグメントで形成されたウェーハ支持面を有する整合ステーション・チャック(216)をさらに含む請求項10から請求項14までのいずれか一項に記載された方法。
- 少なくとも複数の角度間隔を隔てたセクションにおける支持面の外径位置から延在し、ウェーハの周縁をチャックの支持面上へガイドするように、またチャックの支持面と除外領域以外のウェーハ部分との接触を防止するように配置された斜面を整合ステーションに取付けられたウェーハ・チャック(216)が有している請求項16に記載された方法。
- 装置の装填アーム(60)が、移送位置における水平配向と装填ステーションにおけるウェーハ・ホルダーの異なる配向との間でウェーハを移動させることができる請求項10から請求項17までのいずれか一項に記載された方法。
- 装置の装填ステーションが垂直に配置されたウェーハ・ホルダーを有しており、装填アームはウェーハを装填ステーションにおけるウェーハ・ホルダーの垂直配向と移送位置における水平方向との間でウェーハを移動させることができる請求項10から請求項18までのいずれか一項に記載された方法。
- ロボット式移送アーム(112)のウェーハ・チャック(201)の上方に向いた支持面がウェーハの下に向いた面とその周縁の約2mmの範囲内で接触して前記面上にウェーハを支持することにより、水平配置されているウェーハ(35)をカセット(103,104)から取出し、取出したウェーハを移送アーム(112)で装填アーム(60)のウェーハ・チャック(259)の上方に向いたウェーハ支持面(207,208)へ移動してウェーハ周縁の2mmの範囲内のウェーハの下方へ向いた面を装填アームのウェーハ・チャック(259)の上方へ向いたウェーハ支持面に係合させることで載置し、前記支持面上へウェーハ周縁を下方へ向けてガイドするための前記支持面(207,208)のまわりから延在する斜面を有するウェーハ・チャック(201,259)とウェーハ支持面との接触に制限する一方、前記チャックの前記支持面とウェーハ周縁の2mmの範囲を除くウェーハ部分との接触を防止し、装填アーム(60)のウェーハ・チャック(259)のウェーハ支持面にウェーハをラッチ固定して、ラッチ固定したウェーハを処理機械の装填ステーションのウェーハ・ホルダーへ移送することを含む方法。
- 移動には、取出されたウェーハをウェーハ移送アーム(112)によりウェーハ整合装置のウェーハ・チャック(201)へ移動してウェーハの下に向いた面をその周縁の2mmの範囲内でウェーハ整合装置の上に向いたウェーハ支持面上に接触させてウェーハ・チャック(201)上に載置する第1の移動と、ロボット式移送アームのウェーハ・チャックのウェーハ支持面へウェーハを戻した後にウェーハ移送アーム(112)のウェーハ・チャック(201)によって再整合されたウェーハを装填アーム(60)のウェーハ・チャック(259)の上に向いたウェーハ支持面へ移動してその上に載置するという移動が含まれる請求項20に記載された方法。
- ラッチ固定されたウェーハの移送には、装填アーム(60)でウェーハを垂直配向状態に回転して、処理機械の装填ステーションに垂直に配置されたウェーハ・ホルダーへ移送する移送が含まれる請求項20または請求項21に記載された方法。
- 両面処理のために、カセットに対する半導体ウェーハの出し入れ、カセットと装填アーム・チャックとの間の移送、および水平で裏面を上に向けて配向された状態で装填アームへ向かう方向およびそこから離れる方向の移送を特に行うことのできる半導体ウェーハ・ハンドリング・システムに使用される請求項1に記載された移送アーム・チャック(201)であって、移送アーム・チャックは本体(203)と、本体に固定されて延在される一対のセラミックス製のアウトリガー・アーム(205)と、一平面内に配置され、環状リングの少なくとも3つとされる複数のセグメントで形成され、1つのセグメント(207)は本体(203)上に、またセグメント(208)はアウトリガー・アーム(205)の各々の上に1つずつ配置されており、環状リングは移送するウェーハの直径と少なくとも同じ大きさの外径、および2mmを超えない範囲でウェーハの半径よりも小さい内径を有しているウェーハ支持面(207,208)と、すなわち3つのセグメントの各々の荷重リングの外径位置に隣接する角度間隔を隔てた少なくとも3つのセクションにおいて支持面(207,208)から外方へ延在する斜面とを含んでおり、移送アームの斜面は少なくとも2つの隔てられた位置において斜面の上方へ延在する面(219)を含み、斜面はウェーハ(35)の周縁を支持面(207,208)の上へガイドするように、またチャックの支持面とウェーハ接触を、ウェーハの周縁に隣接する2mmを超えない幅の除外面積(202)に実質的に制限するように配置されている移送アーム・チャック
- 裏面処理のために、水平に配置された移送アーム・チャックと室内垂直に配置されたウェーハ・ホルダーとの間で半導体ウェーハを特に移送することのできる半導体ウェーハ・ハンドリング・システムに使用される請求項1または請求項23に記載された装填アーム・チャック(259)であって、装填アーム・チャックが本体(261)と、平面内に配置され、環状リングの複数のセグメントで形成され、環状リングは移送するウェーハ(35)の直径と少なくとも同じ大きさの外径、および2mmを超えない範囲でウェーハよりも小さい半径に等しい内径を有しているウェーハ支持面(265)と、セグメントの上の環状リングの外径位置に隣接して角度間隔を隔てた支持面(265)から外方へ延在し、ウェブの周縁を支持面の上にガイドするように、またチャックの支持面とウェーハとの間の接触をウェーハ周縁に隣接した2mmを超えない幅の除外面積部分(202)に実質的に制限するように配置された斜面と、斜面の2つの角度間隔を隔てたセクションの間に配置され、支持面に支持されたウェーハの周縁を選択的にグリップするように作動可能な対向するグリップ装置とを含む装填アーム・チャック。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/725,823 US6692219B2 (en) | 2000-11-29 | 2000-11-29 | Reduced edge contact wafer handling system and method of retrofitting and using same |
| PCT/US2002/001545 WO2002045137A2 (en) | 2000-11-29 | 2001-11-20 | Reduced edge contact wafer handling system and method of retrofitting and using same |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2004515073A JP2004515073A (ja) | 2004-05-20 |
| JP2004515073A5 JP2004515073A5 (ja) | 2005-05-26 |
| JP4060185B2 true JP4060185B2 (ja) | 2008-03-12 |
Family
ID=24916099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2002547208A Expired - Lifetime JP4060185B2 (ja) | 2000-11-29 | 2001-11-20 | 縁接触を減じたウェーハ・ハンドリング・システムおよび改造方法およびその使用 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6692219B2 (ja) |
| EP (1) | EP1340246A2 (ja) |
| JP (1) | JP4060185B2 (ja) |
| CN (1) | CN1481577A (ja) |
| AU (1) | AU2002236801A1 (ja) |
| TW (1) | TW511136B (ja) |
| WO (1) | WO2002045137A2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11251066B2 (en) | 2018-05-17 | 2022-02-15 | Semes Co., Ltd. | Transfer unit and substrate processing apparatus including the same |
Families Citing this family (52)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6986636B2 (en) * | 2000-06-09 | 2006-01-17 | Brooks Automation, Inc. | Device for positioning disk-shaped objects |
| US6824343B2 (en) * | 2002-02-22 | 2004-11-30 | Applied Materials, Inc. | Substrate support |
| DE10217028C1 (de) * | 2002-04-11 | 2003-11-20 | Nanophotonics Ag | Meßmodul für Waferfertigungsanlagen |
| WO2003106310A1 (en) * | 2002-06-14 | 2003-12-24 | Fortrend Engineering Corporation | Universal reticle transfer system |
| US6769861B2 (en) * | 2002-10-08 | 2004-08-03 | Brooks Automation Inc. | Apparatus for alignment and orientation of a wafer for processing |
| SG115602A1 (en) * | 2003-01-09 | 2005-10-28 | Disco Corp | Conveying device for a plate-like workpiece |
| JP3981885B2 (ja) * | 2003-05-20 | 2007-09-26 | 株式会社ダイフク | 搬送装置 |
| US7654596B2 (en) * | 2003-06-27 | 2010-02-02 | Mattson Technology, Inc. | Endeffectors for handling semiconductor wafers |
| TW200532043A (en) * | 2004-02-10 | 2005-10-01 | Ulvac Inc | Thin film forming apparatus |
| US6833717B1 (en) * | 2004-02-12 | 2004-12-21 | Applied Materials, Inc. | Electron beam test system with integrated substrate transfer module |
| US8668422B2 (en) * | 2004-08-17 | 2014-03-11 | Mattson Technology, Inc. | Low cost high throughput processing platform |
| US7819079B2 (en) * | 2004-12-22 | 2010-10-26 | Applied Materials, Inc. | Cartesian cluster tool configuration for lithography type processes |
| US7255747B2 (en) * | 2004-12-22 | 2007-08-14 | Sokudo Co., Ltd. | Coat/develop module with independent stations |
| US7798764B2 (en) | 2005-12-22 | 2010-09-21 | Applied Materials, Inc. | Substrate processing sequence in a cartesian robot cluster tool |
| US7651306B2 (en) * | 2004-12-22 | 2010-01-26 | Applied Materials, Inc. | Cartesian robot cluster tool architecture |
| US20060182535A1 (en) * | 2004-12-22 | 2006-08-17 | Mike Rice | Cartesian robot design |
| US8167522B2 (en) | 2005-03-30 | 2012-05-01 | Brooks Automation, Inc. | Substrate transport apparatus with active edge gripper |
| US7374391B2 (en) * | 2005-12-22 | 2008-05-20 | Applied Materials, Inc. | Substrate gripper for a substrate handling robot |
| CN101176201B (zh) * | 2005-05-18 | 2011-04-27 | 株式会社村田制作所 | 定位载物台、使用该定位载物台的凸瘤形成装置和凸瘤形成方法 |
| JP5123851B2 (ja) * | 2005-07-08 | 2013-01-23 | クロッシング オートメーション インコーポレイテッド | 加工物を格納するための加工物容器 |
| KR100631928B1 (ko) * | 2005-12-02 | 2006-10-04 | 삼성전자주식회사 | 웨이퍼 세정장치에서의 웨이퍼 가이드 |
| US20070231108A1 (en) * | 2006-04-04 | 2007-10-04 | Applied Materials, Inc. | Method and apparatus for transferring wafers |
| KR100809594B1 (ko) * | 2006-09-12 | 2008-03-04 | 세메스 주식회사 | 척킹부재 및 이를 포함하는 스핀헤드 |
| EP2095412B1 (en) * | 2006-12-14 | 2016-06-29 | Kemet Japan CO., LTD. | Disc holding apparatus and defect/foreign material detecting apparatus |
| US20080166210A1 (en) * | 2007-01-05 | 2008-07-10 | Applied Materials, Inc. | Supinating cartesian robot blade |
| US7694688B2 (en) | 2007-01-05 | 2010-04-13 | Applied Materials, Inc. | Wet clean system design |
| JP5186491B2 (ja) * | 2007-04-23 | 2013-04-17 | 株式会社アルバック | キャリアと支持方法 |
| JP5206528B2 (ja) * | 2009-03-19 | 2013-06-12 | トヨタ自動車株式会社 | ワーク搬送用機器およびワーク搬送方法 |
| US8698099B2 (en) * | 2009-09-30 | 2014-04-15 | Kyocera Corporation | Attraction member, and attraction device and charged particle beam apparatus using the same |
| US9859141B2 (en) | 2010-04-15 | 2018-01-02 | Suss Microtec Lithography Gmbh | Apparatus and method for aligning and centering wafers |
| US9837295B2 (en) | 2010-04-15 | 2017-12-05 | Suss Microtec Lithography Gmbh | Apparatus and method for semiconductor wafer leveling, force balancing and contact sensing |
| JP5574177B2 (ja) * | 2010-09-16 | 2014-08-20 | 株式会社ダイフク | 搬送装置 |
| TWI579939B (zh) * | 2011-08-04 | 2017-04-21 | 政美應用股份有限公司 | 檢測及分類晶圓的裝置及方法 |
| JP5877016B2 (ja) * | 2011-08-26 | 2016-03-02 | 株式会社Screenホールディングス | 基板反転装置および基板処理装置 |
| US8556566B1 (en) * | 2011-09-30 | 2013-10-15 | WD Media, LLC | Disk stacking method and apparatus |
| US9136155B2 (en) * | 2011-11-17 | 2015-09-15 | Lam Research Ag | Method and device for processing wafer shaped articles |
| DE102012100825A1 (de) * | 2011-12-01 | 2013-06-06 | solar-semi GmbH | Vorrichtung zum Bearbeiten eines Substrats und Verfahren hierzu |
| US9431282B2 (en) * | 2011-12-27 | 2016-08-30 | Rudolph Technologies, Inc. | Wafer inversion mechanism |
| US20140064888A1 (en) * | 2012-09-06 | 2014-03-06 | Texas Instruments Incorporated | Appartaus for handling an electronic device and related methodology |
| CN102903661A (zh) * | 2012-10-25 | 2013-01-30 | 上海宏力半导体制造有限公司 | 晶圆末端执行器 |
| JP6186124B2 (ja) * | 2012-12-14 | 2017-08-23 | 東京応化工業株式会社 | 搬送アーム、搬送装置および搬送方法 |
| KR102245762B1 (ko) * | 2014-04-17 | 2021-04-27 | 어플라이드 머티어리얼스, 인코포레이티드 | 홀더, 홀더를 갖는 캐리어, 및 기판을 고정시키기 위한 방법 |
| US9410249B2 (en) * | 2014-05-15 | 2016-08-09 | Infineon Technologies Ag | Wafer releasing |
| WO2016043750A1 (en) * | 2014-09-18 | 2016-03-24 | Halliburton Energy Services, Inc. | Electrically conductive pattern printer for downhole tools |
| CN105619406B (zh) * | 2015-12-31 | 2017-10-17 | 北京七星华创电子股份有限公司 | 多指机械手片叉的校准方法 |
| USD803283S1 (en) | 2016-05-16 | 2017-11-21 | Veeco Instruments Inc. | Wafer handling assembly |
| TWI766105B (zh) * | 2017-09-28 | 2022-06-01 | 美商魯道夫科技股份有限公司 | 晶圓級封裝組裝體處置 |
| US11121019B2 (en) * | 2018-06-19 | 2021-09-14 | Kla Corporation | Slotted electrostatic chuck |
| TW202038370A (zh) * | 2019-03-13 | 2020-10-16 | 以色列商核心流有限公司 | 圓形晶圓側向定位裝置 |
| CN111392395A (zh) * | 2020-03-30 | 2020-07-10 | 武汉华星光电半导体显示技术有限公司 | 上料装置 |
| JP7005690B2 (ja) * | 2020-06-17 | 2022-02-10 | 株式会社Kokusai Electric | 基板処理装置、半導体装置の製造方法、およびプログラム |
| CN112858343B (zh) * | 2021-02-02 | 2021-11-16 | 西安中科微星光电科技有限公司 | 一种多功能硅基液晶芯片在线检测系统及方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4915564A (en) | 1986-04-04 | 1990-04-10 | Materials Research Corporation | Method and apparatus for handling and processing wafer-like materials |
| US5749469A (en) * | 1992-05-15 | 1998-05-12 | Fluoroware, Inc. | Wafer carrier |
| US5516732A (en) | 1992-12-04 | 1996-05-14 | Sony Corporation | Wafer processing machine vacuum front end method and apparatus |
| JP3143770B2 (ja) * | 1994-10-07 | 2001-03-07 | 東京エレクトロン株式会社 | 基板搬送装置 |
| US5700046A (en) * | 1995-09-13 | 1997-12-23 | Silicon Valley Group, Inc. | Wafer gripper |
| US5647626A (en) * | 1995-12-04 | 1997-07-15 | Taiwan Semiconductor Manufacturing Company, Ltd. | Wafer pickup system |
| US5746460A (en) * | 1995-12-08 | 1998-05-05 | Applied Materials, Inc. | End effector for semiconductor wafer transfer device and method of moving a wafer with an end effector |
| TW321192U (en) * | 1995-12-23 | 1997-11-21 | Samsung Electronics Co Ltd | A arm of robot for transporting semiconductor wafer |
| US5980194A (en) * | 1996-07-15 | 1999-11-09 | Applied Materials, Inc. | Wafer position error detection and correction system |
| US5820329A (en) | 1997-04-10 | 1998-10-13 | Tokyo Electron Limited | Vacuum processing apparatus with low particle generating wafer clamp |
| KR100660416B1 (ko) | 1997-11-03 | 2006-12-22 | 에이에스엠 아메리카, 인코포레이티드 | 개량된 저질량 웨이퍼 지지 시스템 |
| US6116848A (en) * | 1997-11-26 | 2000-09-12 | Brooks Automation, Inc. | Apparatus and method for high-speed transfer and centering of wafer substrates |
| CN1291345A (zh) * | 1998-02-18 | 2001-04-11 | 应用材料有限公司 | 用在处理系统晶片搬运器上的端部操作装置 |
| JP2003527737A (ja) | 1998-07-11 | 2003-09-16 | セミトゥール・インコーポレイテッド | マイクロ電子ワークピース取扱い用ロボット |
| US6540468B1 (en) | 1998-09-02 | 2003-04-01 | Tec-Sem Ag | Device and method for handling individual wafers |
| US6298280B1 (en) * | 1998-09-28 | 2001-10-02 | Asyst Technologies, Inc. | Method for in-cassette wafer center determination |
| US6143147A (en) | 1998-10-30 | 2000-11-07 | Tokyo Electron Limited | Wafer holding assembly and wafer processing apparatus having said assembly |
| JP2000260859A (ja) | 1999-03-09 | 2000-09-22 | Nikon Corp | 基板収納装置 |
| US6357996B2 (en) * | 1999-05-14 | 2002-03-19 | Newport Corporation | Edge gripping specimen prealigner |
-
2000
- 2000-11-29 US US09/725,823 patent/US6692219B2/en not_active Expired - Lifetime
-
2001
- 2001-11-16 TW TW090128565A patent/TW511136B/zh not_active IP Right Cessation
- 2001-11-20 EP EP02703165A patent/EP1340246A2/en not_active Withdrawn
- 2001-11-20 AU AU2002236801A patent/AU2002236801A1/en not_active Abandoned
- 2001-11-20 JP JP2002547208A patent/JP4060185B2/ja not_active Expired - Lifetime
- 2001-11-20 CN CNA018199429A patent/CN1481577A/zh active Pending
- 2001-11-20 WO PCT/US2002/001545 patent/WO2002045137A2/en not_active Application Discontinuation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11251066B2 (en) | 2018-05-17 | 2022-02-15 | Semes Co., Ltd. | Transfer unit and substrate processing apparatus including the same |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2002045137A2 (en) | 2002-06-06 |
| US6692219B2 (en) | 2004-02-17 |
| WO2002045137A3 (en) | 2003-03-20 |
| EP1340246A2 (en) | 2003-09-03 |
| AU2002236801A1 (en) | 2002-06-11 |
| JP2004515073A (ja) | 2004-05-20 |
| CN1481577A (zh) | 2004-03-10 |
| TW511136B (en) | 2002-11-21 |
| US20020064450A1 (en) | 2002-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4060185B2 (ja) | 縁接触を減じたウェーハ・ハンドリング・システムおよび改造方法およびその使用 | |
| US6612590B2 (en) | Apparatus and methods for manipulating semiconductor wafers | |
| US6361648B1 (en) | Wafer transfer station for a chemical mechanical polisher | |
| US6174011B1 (en) | Method of and apparatus for handling thin and flat workpieces and the like | |
| US5820329A (en) | Vacuum processing apparatus with low particle generating wafer clamp | |
| KR100281257B1 (ko) | 회전가능하고 수평으로 연장가능한 웨이퍼 홀더를 구비한 웨이퍼 운송 모듈 | |
| US6591960B2 (en) | Edge grip aligner with buffering capabilities | |
| JP2004515073A5 (ja) | ||
| US20060157998A1 (en) | Contamination-free edge gripping mechanism and method for loading/unloading and transferring flat objects | |
| JP2010258480A (ja) | アライナー装置 | |
| US20070018469A1 (en) | Contamination-free edge gripping mechanism with withdrawable pads and method for loading/unloading and transferring flat objects | |
| EP1866958B1 (en) | High speed substrate aligner apparatus | |
| JP2002520860A (ja) | ウェハーを極小接触でハンドリングするためのウェハーキャリア及び方法 | |
| JP2022160683A5 (ja) | ||
| US5931627A (en) | Wafer transport apparatus that can transfer multiple wafers in a short period of time | |
| US5839870A (en) | Transfer system for use with a horizontal furnace | |
| JP2010021257A (ja) | ウェーハアライメント装置及びそれを用いたウェーハ搬送装置 | |
| JPH01281744A (ja) | エッチング装置 | |
| GB2146557A (en) | Centering device | |
| JP2002307343A (ja) | 薄板材の移載方法および装置 | |
| TW202306015A (zh) | 一種晶圓傳送裝置、氣相沉積系統及使用方法 | |
| JPS62141731A (ja) | ウエハハンドリング装置 | |
| JPS62141732A (ja) | ウエハハンドリング装置 | |
| KR20000028401A (ko) | 반도체 제조장비의 웨이퍼 로딩장치 | |
| JPS62122232A (ja) | 装着装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070703 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20071003 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20071011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20071030 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20071127 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20071219 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101228 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 4060185 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20101228 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131228 Year of fee payment: 6 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |