CN1481577A - 减少边缘接触的晶片搬运系统以及改进和使用该系统的方法 - Google Patents
减少边缘接触的晶片搬运系统以及改进和使用该系统的方法 Download PDFInfo
- Publication number
- CN1481577A CN1481577A CNA018199429A CN01819942A CN1481577A CN 1481577 A CN1481577 A CN 1481577A CN A018199429 A CNA018199429 A CN A018199429A CN 01819942 A CN01819942 A CN 01819942A CN 1481577 A CN1481577 A CN 1481577A
- Authority
- CN
- China
- Prior art keywords
- wafer
- chuck
- loading arm
- arm
- station
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68714—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support
- H01L21/68728—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a susceptor, stage or support characterised by a plurality of separate clamping members, e.g. clamping fingers
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/683—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping
- H01L21/687—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches
- H01L21/68707—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for supporting or gripping using mechanical means, e.g. chucks, clamps or pinches the wafers being placed on a robot blade, or gripped by a gripper for conveyance
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/139—Associated with semiconductor wafer handling including wafer charging or discharging means for vacuum chamber
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S414/00—Material or article handling
- Y10S414/135—Associated with semiconductor wafer handling
- Y10S414/14—Wafer cassette transporting
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Robotics (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
本发明提供了一种晶片搬运系统(200)和一种针对现有晶片搬运设备(100)改进所述系统的方法,可以实现一种通过仅接触晶片边缘附近不超过2mm宽的狭窄区域(202)搬运晶片(35)的方法,该方法尤其适用于器件面的接触限制在排除区(202)的背面沉积工艺,所述排除区内的晶片不能使用。所述系统(200)设有在晶片转送臂(212)上的卡盘(201),该卡盘通过重力将晶片固定在分段的、面向上的环形表面(207,208))上。在对准工位卡盘(216)上设有兼容的环形表面(223),所以可以通过仅在晶片表面的排除区(202)接触而转送晶片。加载臂(260)具有两个类似的兼容卡盘(259),所述卡盘还设有气动的夹持件(270),从而可以将晶片装入垂直加工设备(10)中。晶片卡盘(201,216,259)代替真空卡盘改装入加工设备(100)中,且使真空卡盘动作的真空管路用于晶片检测。提供真空卡盘指令的电信号用于使转送臂(260)上的夹持件(270)动作,从而不必改变控制软件,且硬件几乎不必改动。
Description
技术领域
本发明涉及晶片搬运,尤其涉及半导体制造过程中的半导体晶片基体的输送和保持,尤其是直径为200mm或更大的晶片。
背景技术
在半导体工业中,很多公司制造用于器件生产的半导体晶片,尤其是硅晶片的加工设备。半导体晶片加工设备使用自动的或机器人晶片搬运装置,使所述晶片移动通过所述加工设备,且保持所述晶片,以便加工。在半导体工业中,晶片搬运装置通常包括使用真空卡盘,所述卡盘包括在机械臂上的真空型刮铲件(spatula)或末端执行器,它们与晶片的背面相接触。对于通用的搬运装置,与晶片的接触是由真空卡盘在所述晶片中心的环形区域内完成的。在美国专利US5820329中描述了这样一种晶片搬运系统,在此通过引用而包括其内容。这种晶片搬运过程在许多用于加工晶片器件面的晶片加工机中很典型。
在半导体制造中,当晶片的器件面加工完成后,有时在背面施加金属敷层。对于某些器件,所述金属敷层经常是金。利用金进行背面金属敷镀以及用于这种工艺的晶片搬运装置在1999年1月8日提交的一般转让且在审的美国专利申请No.09/227911中描述,在此通过引用而包括其内容。为了进行背面金属敷镀,使用与加工晶片的器件面类似的加工设备,但所述晶片的方向相反。部分加工的晶片方向翻转会使所述晶片中心的器件暴露,而与晶片转送臂的真空卡盘相接触。所述器件通常不能承受这种接触而不发生损坏。
由于这一原因,已经研制了真空卡盘,以沿所述晶片边缘内的6mm环抓取晶片。结果,晶片边缘的6mm环预留为“排除区”,在该区域的晶片不能用于器件制造。所述6mm的排除环需要提供足以使真空卡盘沿搬运装置所需的垂直、水平和翻转方向可靠地夹持晶片的表面积。通常,对于直径200mm的晶片,沿晶片边缘与晶片搬运装置的元件啮合的晶片上的6mm接触面积总计达到超过36平方厘米的面积,或晶片面积的12%。工业界已经表示,需要降低晶片和晶片搬运装置之间的接触面积,可取的是,不超过200mm或300mm的晶片边缘2mm。这种2mm的排除区包括的面积对于200mm的晶片仅为约12平方厘米,对于300mm的晶片约为18平方厘米。现有技术不能满足这种需求。
晶片搬运装置与它们作为其中一部分或互相作用的机器一起进行操作和控制。如果对晶片搬运装置的性质和操作作基本的改变,那么可能导致与半导体加工机的操作控制不兼容,或有负面作用。如果晶片搬运装置的变化不伴随着所述机器的更换或重新设计,则会影响操作软件或系统运行。
这些接触区域通常妨碍被所述接触区域包围的晶片部分用于器件制造,而限制了单张晶片的器件产量。随着图案几何尺寸变得更小,对更高的单张晶片产量的要求变得更高,增加晶片有效面积的需求也更大。
因此,需要提供一种晶片搬运装置和晶片搬运技术,该技术可以在与晶片接触的区域具有更小的接触面积或排除区。还需要提供一种改进的晶片搬运方法,在使用这种改进的晶片搬运装置和晶片搬运技术时,可以不影响机器的操作软件和系统运行。
发明内容
本发明的主要目的是实现用于背面加工的半导体晶片的啮合和转送,同时使得与晶片器件面的接触最小。本发明的具体目的是实现半导体晶片的啮合和转送,同时在邻近晶片外围的排除区接触晶片,尤其是,所述排除区的宽度不大于2mm。
本发明的另一目的是提供一种用于保持和转送晶片的方法和设备,能够保持和转送不同尺寸的晶片,尤其是200mm和300mm的晶片,并能够使用不同尺寸的晶片。
本发明的另一目的是提供一种晶片保持和转送系统,该系统可以减小器件面的接触,以便晶片的背面加工,且该系统与现有技术中的不具备这种能力的加工机器兼容,或可以改装到现有技术中的加工机器上。本发明的另一个目的是实现将这种系统改装到现有的加工机器上,且对所述加工机器的硬件影响最小,并且几乎不影响或不影响所述加工机器的操作软件。
根据本发明的原理,提供了一种晶片搬运系统,该系统具有晶片转送臂卡盘、中心工位卡盘和加载臂卡盘,所述加载臂卡盘可以保持晶片并在卡盘、晶片盒和加工机的晶片保持器之间交换晶片,同时接触晶片表面上减小的面积,且在背面加工过程中,该系统能够仅接触晶片器件面上晶片周边附近最好宽度不超过2mm的排除区。
在特定实施例中,转送臂和加载臂的晶片卡盘具有倾斜的边缘环或边缘环段,其直径大于所述晶片的直径。所述倾斜边缘环保证在晶片的边缘仅有窄的排除区与支撑晶片的卡盘表面相接触。对于某些应用,中心工位卡盘也可以设有这种倾斜边缘环。
在特定实施例中,在转送臂上设有末端执行器卡盘。所述末端执行器是多件式结构,以便获得较高的平面度,使用内部真空通道确定晶片的存在,且具有陶瓷支架,所述支架可以调整而容纳不同直径的晶片,例如,直径200mm和300mm。
所述中心工位卡盘校正晶片的平坦、晶片的晶体取向和晶片的中心。所述卡盘最好是多件式结构,并使用真空通道检测晶片的存在,且在卡盘转动晶片时使用光学传感器感知晶片的平面方向。中心工位卡盘的表面具有下凹部分,比如间隙槽,以使所述端部执行器的支架相对于原位置在卡盘方向的容许范围内顺利地放入或取出晶片。
所述加载臂卡盘在某些方面类似于中心工位卡盘,其中所述卡盘与转送臂卡盘相互作用,但不转动而改变晶片的方向。它使用真空通道确定晶片的存在。加载臂具有枢转的晶片边缘勾挂或夹持元件,所述元件在排除区内夹持晶片边缘。所述夹持元件是通过电气致动装置气动操作的,所述致动装置可以响应于操作真空控制装置的相同电控信号,所述真空控制装置是前一加载臂的真空卡盘。加载臂卡盘的夹持元件随机械转送臂相对于加载臂或加载臂相对于加工机器的晶片支架的动作而起动。所述夹持元件可以是枢转的夹持钩,或代替枢转的夹持钩,可以是其它类型的晶片夹持装置,比如转动锁闩,类似于所述现有技术中具有枢转的滚子或非接触突出部的那些,其中所述滚子等可以在晶片边缘转动,将晶片锁定在加载臂卡盘上。所述夹持元件可以使加载臂沿垂直方向或面向下夹持晶片,同时沿其它或不同的方向夹持或移动。
在本发明的特定实施例中,装备系统的真空卡盘是利用机械式晶片啮合卡盘改进的,尤其是更换转送臂端部执行器、晶片对中或对准工位以及晶片加载臂上的真空卡盘。在这种系统中,转送臂可以拾取并水平移动处理过的晶片,使它们在晶片盒、对中或对准工位和加载臂之间转送。而且,在对中或对准工位的卡盘可以接收来自转送臂的晶片,确定并对准晶片的方向,且也沿水平方向将晶片返回到转送臂上的对中和定向位置。此外,加载臂卡盘可以在转送臂卡盘和晶片加工机器的晶片支架之间移动晶片,或更换另一晶片,而在转送臂上的水平方向和加工机器的晶片支架上的垂直方向之间使晶片重新定向。在从转送臂转送晶片过程中它们水平放置且面向上时,晶片至少部分通过重力保持在转送臂的水平放置的、面向上的卡盘和对准工位上,且部分通过重力保持在加载臂卡盘上,且沿其它方向移动时,由正向的晶片边缘夹持钩保持。
在本发明的特定实施例中,晶片搬运系统的控制装置与现有技术中装配的真空卡盘的控制装置兼容,所以,所述系统可以改进而没有基本硬件的变化,且不改变所述机器的控制软件。真空卡盘的控制管路用于感应卡盘上晶片的存在。夹持操作气缸由电动气动螺线管操作,而电磁铁由提供给真空卡盘操作的电子软件的真空指令信号控制。
本发明的实施例可以以改进套件的形式提供,所述套件包括三个配置起来代替现有加工机器的转送臂、对准工位和加载臂上的真空卡盘的卡盘组件。
本发明的方法和设备具有增加晶片的使用面积约4%的优点,或晶片的面积从88%增至96%,减小了晶片的排除区或不能使用的面积约2/3,并且,平均起来每一晶片生产的器件数目有类似的增加,从而提高了半导体加工工艺和机器的生产率。
从下面的详细描述中,本发明的这些和其它目的和优点将更为明显。
附图说明
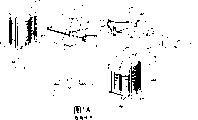
图1是示出了本发明适用的现有技术的晶片搬运和加工设备的透视图。
图1A是图1的一部分的放大透视图,示出了卡盘组件的运动。
图2是示出了图1的回转加工机器的现有技术晶片支架的局部剖视图。
图2A是图2的锁闩示为处于锁定工位的现有技术另一实施例的详细视图。
图3是相对于现有技术的设备的晶片转送臂,图1的现有技术设备的回转加工机器的一部分的剖视图。
图4是根据本发明的一个实施例的晶片搬运系统的透视图,该系统与图1-3A中示出的现有技术的设备兼容。
图5是与对准工位和加载臂晶片卡盘对准的图4的晶片搬运系统的晶片转送臂的端部执行器的顶视示意图。
图5A是沿图5的线5A-5A的剖视图。
图5B是沿图5的线5B-5B的剖视图。
图5C是沿图5的线5C-5C的剖视图。
图5D是沿图5的线5D-5D的剖视图。
图5E是顶视示意图,类似于图5,示出了将晶片定位在加载臂卡盘的另一实施例上的晶片转送臂的端部执行器。
图5F是沿图5E的线5F-5F的剖视图。
图5G是沿图5E的线5G-5G的剖视图。
图6是图5的加载臂卡盘的夹持机构的部分顶视图。
图7是沿图6的线7-7的剖视图,示出了处于释放状态的加载臂卡盘夹持件。
图7A是类似于图7的剖视图,示出了夹持晶片的加载臂卡盘夹持件。
图8是详细示出了图7的加载臂卡盘夹持件的放大的局部剖视图。
具体实施方式
本发明的工作平台是图1中示出的半导体晶片搬运和加工设备100,该设备是现有技术中的代表。设备100包括美国专利US4915564或US5516732中所示和所述类型的高生产量的回转型垂直晶片加工机10,在此通过引用而包括。本发明还可适用于其它类型的晶片加工机,比如普通的群集工具型加工机、和晶片保持水平且向上放置的其它机器、以及晶片沿其它方向移动或加工的机器。然而,所述的实施例尤其适于在此所述的设备100类型的机器,尤其是通过对该设备进行改进。
设备100包括罩壳102,以虚线示出,内有洁净氛围,加工机10位于其中。罩壳102内有支撑两晶片盒103、104的设施,每一晶片盒装有格架105,用于以平行间隔的方式支撑垂直叠放的水平定向的晶片35,以便在机器10内进行加工。盒103、104装有提升机构106,用于垂直移动所述盒103、104,使格架的每一晶片位置选择性地到达转送平面,从而可以将晶片取下或装入所述盒的选定位置。
罩壳102还具有晶片转送机构110,该机构具有晶片转送臂112,该臂可绕垂直枢轴115转动,且可在转送平面119内延伸。在转送臂112的自由端是夹持件或端部执行器114,适于从所述盒103、104拾取晶片35和将晶片35放入所述盒103、104,以及从晶片对中或对准工位118的对中卡盘116和加载臂60端部的加载臂卡盘59上拾取晶片和将晶片放在上面。所述盒103、104,对中卡盘116和加载臂卡盘59沿环绕转送臂112的枢轴115的圆弧117定位或可定位。加载臂卡盘59绕着加载臂60的纵向轴线121上转动,从而使夹持的晶片35在加载臂和转送臂112之间转送所必需的水平方向、和将晶片转送到晶片加工机10的负载锁定工位14的晶片保持器30(图2)以及从其转送出所需的垂直方向之间转动。所述臂60还绕垂直轴线122转动,而将晶片转送到负载锁定工位14的晶片保持器30以及从其转送出。
机器10包括主真空室11,该室为两圆形壁12、13之间封闭的盘形增压室形式,环绕中心水平轴线19以均匀的角度间隔设有多个例如5个工位14-18。在室11内,装有圆形分度盘20,以便绕轴线19上转动,所述分度盘上有5个均匀隔开的圆形开口21,可以同时分别与每一加工工位14-18对齐。
如图2所示,在每一开口21中,设有密封环27,它弹性支撑在三个均匀角度隔开的、与分度盘20连接的片弹簧28上。在每一密封环27内,设有晶片保持器30,它刚性地支撑在一组三个陶瓷绝缘销29上。晶片保持器30分别用于在盘20按1/5转或72°转位时,将晶片35输送通过每一加工工位14-18。至少所述五个工位14-18之一,例如工位14,是负载锁定工位,晶片35经该工位被插入主室11中或从中取出。其余的工位15-18包括多种处理工位类型,比如溅射涂覆或蚀刻工位。
每一晶片保持器30的主结构是环形本体31,通常由铝制成。本体31具有夹持环32,它弹性地连接于保持器本体31,且通过一组三个均匀角度隔开的片弹簧36偏压在本体上。夹持环32具有稍小于待夹持的晶片35的内径。晶片35通过夹持环32保持在保持器本体31的开口39内,该夹持环叠放在晶片35的边缘。弹簧36对夹持环32和晶片施压而靠在一组三个锁定夹33上,所述锁定夹是绕所述开口21以相等角度间隔的三个锁定组件65之一的锁定夹。
所述锁定组件65可以是任何构造。在图2中示出的那些是枢转地安装在保持器本体31周围的空间中的,且是美国专利US5820329中详细描述的类型。如图2所示,锁定夹33在一端固定于枢轴70的一端,该枢轴转动地支撑在轴承(未示出)中,穿过保持器30的本体31延伸。在枢轴70远离所述夹33的另一端,所述轴刚性连接于圆盘74,该圆盘具有一对孔75,在圆盘74的后表面有扩展的开口。孔75在轴70的两侧间隔相同的距离,以容纳加载臂60上的致动器6(图3)的销子62,而使致动器的转动可以使盘74、轴70和夹子33绕轴70的轴线转动。圆盘74在轴70上的转动限于90°的转动运动。在具有锁定组件65的保持器30的加载过程中,晶片35压在夹持环32上,而使其移离保持器本体31,所以锁定夹33可以在锁定(虚线)和打开(实线)位置之间转动,而不会使夹子33磨损晶片33的表面。
在图2A中示出了另一种锁定组件65a,该组件在美国专利申请No.09/183503中描述,在此通过引用而包括。锁定组件65a,如上述的锁定组件65,在晶片保持器的夹持环32的开口39周围夹持靠在夹持环32上的晶片35的边缘。然而,每一锁定元件65a枢转地安装在夹持环32上,而不是保持器本体31上。锁定组件65a如此安装在固定到夹持环32上的安装柱130上。锁定组件65a包括经碳化钨滚珠轴承(未示出)枢转地安装在柱130上的非金属锁定体131,且通过围绕安装柱130的螺旋弹簧(未示出)偏压靠在夹持环32上。锁定体131分别具有一对致动器销容纳孔或槽175,它们类似于前面相对于锁定组件65描述的孔75,它们相等地与安装柱130隔开,容纳转送臂上的致动机构的致动销,如下所述地操纵锁定组件65a。在锁定体131的相对端转动地安装一对非金属滚子,包括前滚子135和后滚子136。
图3是通过加工机10、负载锁定工位14的剖视图。
负载锁定工位14包括可移动的杯形罩54,该罩用于迫使密封环27靠在室11的前壁12上,形成密封的负载锁定室55,在负载锁定工位14A的门56提供通过转送或加载臂60的真空卡盘59输送的晶片35的存取。
在半导体器件的制造过程中,加载臂60平移晶片35,首先是器件面经保持器本体31的开口进入负载锁定室55,使晶片35的外边缘接触夹持环32的下侧。为了进行器件面加工,加载臂卡盘是圆形卡盘59a,啮合晶片35的背面中心。真空卡盘59a通过加载臂60中的真空管路69连接于可选择操作的真空源。
当加工晶片35的背面时,比如进行背面金属敷镀而在晶片上沉积连续的金属薄膜,比如金,晶片翻转,卡盘59、114、116从器件面啮合晶片35。因为必须避免卡盘和晶片上的器件之间的接触,以防止损坏或破坏器件,必须将器件限制在晶片35的保留区或限制区,避免器件位于晶片表面上的排除区内。通常,排除区是绕晶片周边、晶片边缘6mm内的区域。在这一排除区内,弧形真空卡盘59b,如图3A所示,仅接触晶片35边缘的排除区。卡盘桨片或晶片啮合端最好绕晶片周边6mm环的圆周的主要部分延伸。
晶片35插入保持器30是利用锁定夹33转动而离开晶片35的路径实现的。锁定夹33在晶片35后面旋转到适当位置和转出适当位置是通过转送或加载臂60的三个锁定致动器61实现的,如图3所示。锁定致动器61分别包括一对在可气动工作的转动气缸63的轴上的致动销62,当销62啮合保持器30上的三个锁定机构65中对应的一个时,所述气缸沿一个方向转动90°,同时将三个夹子33移动到晶片35后面的锁定工位,然后沿另一方向转动90°,将夹子33移动到超过晶片35边缘的保持器的释放工位。
根据本发明的原理,晶片搬运和加工设备,比如设备100,设有晶片转送机构210,类似于结合图1描述的设备100的转送机构110,但装有晶片搬运系统200,其中的一个实施例在图4中示出。系统200包括三个卡盘和相应的硬件,包括位于转送臂212末端的转送臂卡盘或端部执行器201,它以上述转送臂112的方式操作。系统200还包括在晶片对中工位118的对中卡盘216,该卡盘以上述对中卡盘116的方式操作,以及在加载臂260端部的一对加载臂卡盘259,该卡盘以上述加载臂60的方式操作。
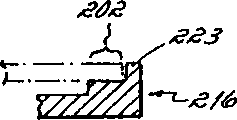
所述端部执行器201包括晶片支撑面,该支撑面仅在排除区202内接触水平放置的晶片35的面向下的器件面,所述排除区在晶片35的器件面边缘2mm内。晶片35在重力作用下静止在端部执行器201上,端部执行器移动,而使晶片35移动出入晶片盒103、104,出入对准工位118的对中卡盘216,出入加载臂260上的加载臂卡盘259。图5,5A-5D详细示出了所述端部执行器201,包括通过螺栓204固定在转送臂212端部的转送臂盘203形式的本体,和一对刚性连接于所述转送臂盘203的梯形截面的支撑臂205,当它们被锁定垫圈螺母211固定时,配合在盘203上的燕尾键槽(未示出)中。支架205可以在键槽中调节,而容纳不同尺寸的晶片。臂205是陶瓷的,具有直立的支撑尖端206,它接触转送臂212转送的晶片35的排除区202。盘203和尖端206分别具有圆形凸肩部分207、208,用于在排除边缘202支撑晶片35。紧邻凸肩部分207、208是相应的倾斜圆唇缘的按角度或周向间隔的段部分217、218,它们紧接环绕转送臂212运送的晶片35的周边。螺母211与所述唇缘部分217相切,且具有锥形顶面219,形成倾斜唇缘的延伸部分,并与所述唇缘一起将晶片导至凸肩段部分207、208上。
倾斜圆唇缘的段部分217、218和销子的顶面219用于使所支撑的晶片马上在端部执行器201上对中,而不会使晶片的边缘超出所述唇缘。所述斜面的内径围绕宽度小2mm的凸肩段部分207、208的环形表面,其中晶片35的排除区202支撑在上面。所述斜面的内径等于标准晶片的标称直径,通常为200mm或300mm,加上约0.008英寸或约0.2mm的径向方向上的最大误差,而使最大的晶片可以放在倾斜的圆形唇缘内。支架205部分地通过垫圈螺母211固定在盘202上。螺母211的头部219的锥形侧面延伸所述盘203上表面上方的倾斜段部分217、218,直到在从盒103中拾取晶片35时,有助于将晶片35导至由倾斜唇缘的所述段部分217、218包围的圆形区域上。卡盘上的斜面在卡盘的支撑表面上方升高至少为晶片的标称厚度的距离,最好约1mm。所述斜面的角度最好为约45°,加或减10°或15°。所述斜面不必一直环绕所述支撑表面,而可以是许多点,可取的是跨越180°的三个或更多的点,更可取的是四个点。所述支架205足够薄,而到达叠放在盒103、104中的晶片35之间,以便取出和放置晶片。
如图5所示,支架205的尺寸适于装配在处于对中工位118的对中卡盘216的表面上的槽221、222中。对中卡盘216具有下部盘形本体216a和分段的直立边缘环223,所述环是半圆形的,以接收来自端部执行器201的晶片35,所述端部执行器可以提升并转动端部执行器201上的晶片,使晶片35上的平面或缺口235(图5)到达对应于对中卡盘216上的平面224的预定方位。边缘环223可以是倾斜的,利用转送臂卡盘,引导晶片仅在晶片的排除区接触卡盘的支撑表面,但没有斜面可能更兼容所述对中机构和功能。在所示实施例中,对中工位的边缘环223具有垂直于晶片平面的内表面。在所述对中工位,对中卡盘216上的光学传感器(未示出)确定晶片的方位。
同样如图5所示,加载臂卡盘259分别具有卡盘板或本体261,上有槽262、263,用于接纳端部执行器201的支架205。卡盘259代替图3A的器件面啮合真空卡盘59b。板261在其边缘具有分段的部分圆形唇缘265,绕晶片35的边缘的排除区位于其上。唇缘265是倾斜的,与上述的转送臂卡盘和对中工位卡盘一样,确保器件面仅接触不超过2mm宽的排除区。
如图6、7、7A和8所示,在唇缘265周围的间隔处是多个夹持件或夹持指状件270,例如2至4个,每一个都枢转地安装在杆281上,该杆支撑在加载臂卡盘259的本体261上的轴承中。夹持件270分别具有缺口273,用于捕获晶片35的周边。夹持件270分别具有操作杆271,该杆通过安装在加载臂卡盘259上的致动器272控制,所述加载臂卡盘响应于通过线路69提供的真空指令而操作,控制真空而操作现有技术系统中的真空卡盘59、59a,但该卡盘已经去除而更换为机械式加载臂卡盘。致动器272可以是电动或气动控制的气缸,机电式电磁螺线管或某些其它的用于在图7和7A所示的释放和夹持位置之间移动夹持件270的装置。而且,如图8所示,真空端口295还位于卡盘本体261上,连接唇缘265上的一系列孔(未示出),以便感应卡盘259内正确安放的晶片35。
致动器272具有固定在加载臂卡盘259的本体261上的本体282和可移动元件283,所示可移动元件沿垂直于本体261的方向在靠近本体261的收缩位置(图7)和远离本体261的延伸位置(图7A)之间往复移动,其中在所述收缩位置夹持件270处于释放位置,而在延伸位置夹持件270处于夹持位置。固定在致动器272的可动元件283端部的是致动杆284,该杆平行于本体261延伸且随着元件283运动。每一夹持件270的操作杆271具有叉形件285,上旋有可调节的固定螺钉286。所述固定螺钉具有小孔287,其中钩挂软弹簧288,所述弹簧张紧地连接于固定螺钉286和致动杆284的远端之间。弹簧288用于限制力的大小,所述力可以在夹持晶片35靠在卡盘259的唇缘265的过程中由夹持件270对晶片35的背面施加。所述固定螺钉286可以用于手动调节这一限制。每一操作杆271还具有延伸的连杆289,它们在其远端利用叉形件290枢转地连接在一起,其中一个的端部在另一个的端部的轴承291上枢转且滑动。连杆289端部的互连使夹持件270的运动同步。
代替夹持件270,可以使用其它元件将晶片固定在加载臂上。可以使用具有滚子或指状件的可转动锁闩,例如前面关于现有技术的描述中提到并通过引用而包括的。这些也可通过气动操作的致动器61或通过机械或其它装置操作。
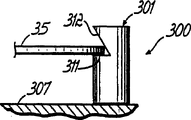
例如图5E示出了加载臂卡盘259的另一实施例300,它使用三边支撑晶片35的支撑件,该支撑件包括固定销301和两个滚子302。该实施例的加载臂卡盘300示为用于支撑300mm且没有图5中所示实施例的边缘平面235的晶片。或者,具有平面或缺口的晶片35可以放在卡盘300上,而所述平面或缺口定向成错过固定销301和滚子302。卡盘300可以用作加载臂卡盘或对中工位卡盘。卡盘300提供了与晶片35的边缘上三点或多点接触,且包括例如安装固定销301和一对凹入或有缺口的滚子302的壳体307。所述滚子302安装在壳体307上,而可以锁定在晶片35的边缘上以及从晶片边缘回缩。卡盘300这样配置,即转送臂卡盘或端部执行器201可以在滚子处于回缩位置时通过晶片沿边缘在两滚子302之间前进,而靠在固定销301上将晶片35输送到卡盘300上。滚子302远离固定销301相对于卡盘300的中心线303定位,所述滚子的间隔角304最好分开至少160°,但小于180°。根据端部执行器201的设计,小于160°的角是可以接受的。
当卡盘300面向上时,固定销301具有水平表面311,通过仅在例如图5F所示的2mm排除区内接触晶片35而支撑晶片35的边缘。所述销301具有外伸、倾斜且几乎垂直的表面312,该表面朝晶片35的中心径向向内。滚子302可以安装在枢转杆302a上,而随致动器61的运动而在远离晶片35的边缘的收缩位置和靠着晶片35的边缘的锁定位置之间摆动,如图5E所示。或者,滚子302可以随其它响应于以前用于控制真空卡盘的信号的致动器转动,如在上述实施例中的用于夹持指状件270的致动器272的情况。滚子302具有平滑的下凹表面315,当在锁定位置时限制晶片35的边缘,并从端部执行器201拾取晶片35。滚子302的凹入表面315和固定销301的倾斜表面312和水平表面311组合将晶片35限制在卡盘300上,所以晶片35可以转动到垂直方向、或面向下的方向、并转送出入晶片保持器30。
加载臂卡盘可以正确地将晶片放入晶片加工机中。在放入加工机的负载锁定室的空闲晶片保持器30内之后,夹持件或锁定件释放晶片,同时晶片保持器抓住晶片。使用相反的顺序从负载锁定室取出晶片。当加载臂卡盘从晶片保持器缩回时,加工机可以转换角度使下一晶片保持器进入负载锁定工位。利用加载臂上的两个卡盘,加载臂检查负载锁定工位处晶片保持器内晶片的存在,且如果存在一个,则利用加载臂上的空卡盘取出所述晶片。然后加载臂旋转180°,使新晶片到达适当位置,并将其放入负载锁定工位的晶片保持器中。然后,将晶片放入负载锁定工位中的卡盘可以在转动180°将加载臂的另一卡盘上加工过的晶片转送到所述端部执行器上之前,从转送臂端部执行器接纳下一晶片。
虽然上述描述和附图公开了本发明的多个实施例,但对于本领域的技术人员而言,显然可以作出添加和改进,而不脱离本发明的原理。
Claims (26)
1.一种半导体晶片搬运系统,尤其是能在晶片加工机中输送具有在其一侧的器件表面、直径、通常为圆形的边缘、在所述器件表面上紧接所述边缘不超过大约2mm宽的排除区的半导体晶片,以便进行加工,同时仅在其排除区接触晶片的器件表面,所述系统包括:
转送臂卡盘;
对准工位卡盘;
加载臂卡盘;并且
每一转送臂卡盘、对准工位卡盘和加载臂卡盘具有:
位于一个平面内且由圆环段部分形成的晶片支撑表面,所述圆环具有至少与所述晶片直径一样大的外径、和小于所述晶片直径在至少2mm内的内径;并且
每一转送臂卡盘和加载臂卡盘具有:
在至少多个角度间隔部分从所述支撑表面的外径延伸的斜面,用于将晶片的边缘引导至所述支撑表面上,并防止卡盘的支撑表面和晶片之间在排除区之外接触。
2.如权利要求1所述的系统,其特征在于:
转送臂卡盘的晶片支撑面位于水平面上并且朝向上方;以及
转送臂卡盘包括:
用于安装在机器的晶片转送机械臂端部的本体,所述本体至少具有所述圆环段部分之一;
从其延伸的至少两臂,每一臂具有一远端,每一远端至少具有所述圆环段部分之一;
转送臂卡盘的斜面在每一本体和所述臂端部上的至少所述部分之一上的所述支撑表面的外径向上延伸;
其中所述半导体晶片搬运系统可以利用在转送臂端部上的转送臂卡盘拾取并通过重力支撑半导体晶片,所述晶片使其器件表面向下,其排除区与所述本体和转送臂端部上的支撑表面的所述部分、以及邻近所述支撑表面的每一所述部分的晶片直径外侧的斜面形成表面接触。
3.如权利要求1所述的系统,其特征在于:
转送臂卡盘的晶片支撑面位于水平面上并且朝向上方;
所述斜面从所述支撑表面的外径向上且向外延伸;以及
所述转送臂卡盘拾取半导体晶片并通过重力支撑,所述晶片使其器件表面向下,其排除区与所述支撑表面的所述部分、以及邻近所述支撑表面的每一所述部分的晶片直径外侧的斜面形成表面接触,从而使晶片的器件表面和所述支撑表面的接触限于晶片的排除区。
4.如权利要求3所述的系统,其特征在于,所述转送臂卡盘包括:
位于所述支撑表面上的真空端口,当形成连接时,通过所述晶片表面的排除区的阻挡,可以启动晶片存在检测器。
5.如权利要求3所述的系统,其特征在于,还包括:
对准工位卡盘,它具有位于平面内、且由圆环段部分形成的晶片支撑表面,所述圆环具有至少与晶片直径一样大的外径、和小于晶片直径在至少2mm内的内径。
6.如权利要求5所述的系统,其特征在于,所述对准工位卡盘具有在至少多个角度间隔的部分上从所述支撑表面的外径延伸的斜面,用于将晶片的边缘引导至支撑表面上,并防止卡盘的支撑表面和晶片之间在排除区之外接触。
7.如权利要求5所述的系统,其特征在于:
所述对准工位卡盘的晶片支撑表面位于水平面内、且面向上;以及
所述对准工位卡盘用于安装在机器的晶片对准装置上,且具有至少一个位于所述支撑表面的两部分之间的一个凹入部分,从而可以使转送臂卡盘在晶片和对准工位卡盘之间延伸,将晶片放在对准工位卡盘上或从对准工位卡盘上拾取;
其中所述晶片对准卡盘可以通过重力支撑,以便由转送臂卡盘对准以及拾取半导体晶片,所述晶片使其器件表面向下,且其排除区与晶片对准卡盘上的支撑表面的所述部分形成表面接触。
8.如权利要求7所述的系统,其特征在于,:
所述对准工位卡盘具有在至少多个角度间隔的部分上从所述支撑表面的外径延伸的斜面,用于将晶片的边缘引导至支撑表面上,并防止卡盘的支撑表面和晶片之间在排除区之外接触;
所述对准工位卡盘的斜面在所述对准工位卡盘的支撑表面的所述部分上的所述对准工位卡盘的支撑表面的外径向上延伸;
其中所述晶片对准卡盘可以支撑半导体晶片,所述对准工位卡盘的所述斜面在邻近所述支撑表面的每一所述部分的晶片直径外侧。
9.如权利要求1所述的系统,其特征在于,
所述加载臂卡盘用于安装在机器的晶片转送臂上,且具有至少一个位于所述支撑表面的两部分之间的一个凹入部分;
所述凹入部分这样构造,即当加载臂卡盘的晶片支撑表面处于水平面内、且面向上时,所述转送臂卡盘可以在加载臂卡盘的面向上的支撑表面上支撑的晶片和加载臂卡盘之间延伸,而将晶片放在加载臂卡盘上或从加载臂卡盘上拾取;
加载臂卡盘的斜面从所述加载臂卡盘的支撑表面的外径向上延伸;
一组可移动的锁定元件,当啮合时用于移动邻靠与排除区相对的晶片背面,而将晶片夹持在加载臂卡盘的支撑表面上,当脱开时释放晶片;
其中锁定元件脱开时,所述加载臂卡盘可以通过重力支撑半导体晶片,以便转送臂卡盘拾取,所述晶片使其器件表面向下,且其排除区与加载臂卡盘上的支撑表面的所述部分、以及邻近所述支撑表面的每一所述部分的晶片直径外侧的斜面形成表面接触。
10.一种制造能输送半导体晶片的晶片搬运设备的方法,该晶片具有器件面、背面、直径和通常为圆形的边缘,且通过仅在所述器件面上的邻近所述边缘的不超过2mm宽的排除区接触晶片输送,该设备具有:
至少一个晶片盒工位,用于保持水平放置的晶片形成的垂直叠层;
具有加载工位的晶片加工机,所述加载工位上有晶片保持器;
用于在加载工位的晶片保持器和转送位置的水平方位之间移动晶片的加载臂;
转送机械臂,用于在晶片盒工位的晶片盒和对中工位以及加载臂的转送位置之间单个地移动水平方向的晶片;
所述方法包括:
连接至少两个晶片卡盘,至少在每一转送机械臂和加载臂上连接一个,每一卡盘具有:
位于一个平面内且由圆环段部分形成的晶片支撑表面,所述圆环具有至少与所述晶片直径一样大的外径、和小于所述晶片直径在至少2mm内的内径;
在至少多个角度间隔的部分上从所述支撑表面的外径延伸的斜面,用于将晶片的边缘引导至支撑表面上,并防止卡盘的支撑表面和晶片之间在排除区之外接触。
11.如权利要求10所述的方法,其特征在于,至少所述转送机械臂和加载臂之一具有真空卡盘;并且
至少连接的晶片卡盘之一具有在其圆环段部分内的真空端口;以及
晶片卡盘的连接包括通过从真空卡盘之一上脱开真空控制管路,然后再将该真空控制管路连接于所述晶片卡盘的所述端口而连接至少一个卡盘。
12.如权利要求11所述的方法,其特征在于,还包括:
使用所述设备中再次连接的真空控制管路操作晶片存在检测器。
13.如权利要求10所述的方法,其特征在于,至少所述转送机械臂和加载臂之一具有真空卡盘;并且
至少所述晶片卡盘之一具有锁定元件,用于保持晶片靠着所述圆环段部分;
所述的至少所述晶片卡盘之一的连接包括从所述真空卡盘脱开控制管路,然后再将该真空控制管路连接于所述锁定元件。
14.如权利要求10所述的方法,其特征在于,所述加载臂具有真空卡盘;并且
至少所述晶片卡盘之一具有锁定元件,用于保持晶片靠着所述圆环段部分;以及
所述的至少所述晶片卡盘之一的连接包括从所述加载臂的真空卡盘脱开控制管路,然后再将该真空控制管路连接于所述锁定元件。
15.如权利要求10所述的方法,其特征在于,所述加载臂具有真空卡盘;并且
至少所述晶片卡盘中的两个具有锁定元件,用于保持晶片靠着所述圆环段部分;
晶片卡盘与加载臂的连接包括用所述的至少两个晶片卡盘之一更换加载臂上的每一真空卡盘,从所述加载臂的每一真空卡盘上脱开真空控制管路,然后再将相应的所述真空控制管路连接于相应的所述至少两个晶片卡盘之一的锁定元件上。
16.如权利要求10所述的方法,其特征在于,所述设备还具有对准和对中工位,用于使置于水平面内的晶片重新定向,且所述方法还包括:
晶片卡盘连接于对准工位,所述晶片卡盘具有位于平面内、且由圆环段部分形成的晶片支撑表面,所述圆环具有至少与晶片的直径一样大的外径、和小于晶片直径在至少2mm内的内径。
17.如权利要求16所述的方法,其特征在于,连接于所述对准工位的晶片卡盘具有在至少多个角度间隔的部分上从所述支撑表面的外径延伸的斜面,用于将晶片的边缘引导至支撑表面上,并防止卡盘的支撑表面和晶片之间在排除区之外接触。
18.如权利要求10所述的方法,其特征在于,所述设备的加载臂可以在转送位置的水平方向和加载工位的晶片保持器的不同方向之间移动晶片。
19.如权利要求18所述的方法,其特征在于,所述设备的加载工位具有垂直放置的晶片保持器,且所述加载臂可以在加载工位的晶片保持器的垂直方向和转送位置的水平方向之间移动晶片。
20.一种晶片转送方法,包括:
通过转送机械臂的晶片卡盘的面向上的晶片支撑表面在晶片边缘约2mm内啮合晶片的面向下的一侧,而从盒中取出水平放置的晶片,并在所述表面上支撑所述晶片;
利用所述晶片转送臂移动取出的晶片,并通过加载臂的晶片卡盘的面向上的晶片支撑表面在晶片边缘约2mm内啮合晶片的面向下的一侧,而将所述晶片放置在加载臂的晶片卡盘的面向上的晶片支撑表面上;
将所述晶片锁定在加载臂的晶片卡盘的晶片支撑表面上,并将锁定的晶片转送到加工机的加载工位的晶片保持器。
21.如权利要求20所述的方法,其特征在于,还包括:
限制至少所述晶片卡盘之一的晶片支撑表面与从所述支撑表面周围延伸的斜面的接触,以将晶片的边缘向下引导至所述支撑表面上,同时防止所述卡盘的所述支撑表面和晶片之间在晶片边缘约2mm内之外的接触。
22.如权利要求20所述的方法,其特征在于,所述移动包括:
首先利用晶片转送臂移动取出的晶片,通过所述晶片对准装置的面向上的晶片支撑表面在晶片边缘2mm内啮合所述晶片的面向下的一侧,而将所述晶片放置在晶片对准装置的晶片卡盘上,然后重新对准所述晶片和晶片对准装置,将所述晶片返回到转送机械臂的晶片卡盘的晶片支撑表面;
利用晶片转送臂的晶片卡盘移动重新对准的晶片,将所述晶片放在加载臂的晶片卡盘的面向上的晶片支撑表面上。
23.如权利要求20所述的方法,其特征在于,所述锁定的晶片的转送包括利用加载臂将晶片转动到垂直方向,然后将所述晶片转送到加工机的加载工位的垂直放置的晶片保持器。
24.一种半导体晶片搬运系统,尤其是能在晶片加工机中输送具有在其一侧的器件表面、直径、通常为圆形的边缘、在所述器件表面上紧接所述边缘不超过大约2mm宽的排除区的半导体晶片,以便进行加工,同时仅在其排除区接触晶片的器件表面,所述系统包括:
转送臂卡盘;
对准工位卡盘;
加载臂卡盘;并且
每一转送臂卡盘、对准工位卡盘和加载臂卡盘具有:
用于在至少三个位置在不超过晶片边缘2mm范围内支撑晶片的装置;
转送臂卡盘具有:
在至少多个角度间隔部分从所述支撑表面的外径延伸的斜面,用于将晶片的边缘引导至所述支撑表面上,并防止卡盘的支撑表面和晶片之间在排除区之外接触;
加载臂卡盘或对准工位卡盘在所述至少三个位置具有紧邻晶片边缘的斜面。
25.一种搬运半导体晶片的方法,包括:
通过转送臂卡盘的向上表面在晶片边缘2mm内啮合晶片的器件面从晶片盒提升器件面向下的晶片;
将器件面向下的晶片放置在加载臂卡盘上,加载臂卡盘具有在晶片边缘2mm内啮合晶片的表面;
将晶片夹持到加载臂卡盘上;
沿着一个方向输送晶片,其中,晶片的器件面朝向除向下之外的方向。
26.如权利要求25所述的方法,其特征在于,转送臂具有在至少多个角度间隔部分从支撑表面的外径延伸的斜面,用于将晶片的边缘引导至所述支撑表面上,并防止卡盘的支撑表面和晶片之间在晶片边缘2mm内的排除区之外接触。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US09/725,823 US6692219B2 (en) | 2000-11-29 | 2000-11-29 | Reduced edge contact wafer handling system and method of retrofitting and using same |
| US09/725,823 | 2000-11-29 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| CN1481577A true CN1481577A (zh) | 2004-03-10 |
Family
ID=24916099
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CNA018199429A Pending CN1481577A (zh) | 2000-11-29 | 2001-11-20 | 减少边缘接触的晶片搬运系统以及改进和使用该系统的方法 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US6692219B2 (zh) |
| EP (1) | EP1340246A2 (zh) |
| JP (1) | JP4060185B2 (zh) |
| CN (1) | CN1481577A (zh) |
| AU (1) | AU2002236801A1 (zh) |
| TW (1) | TW511136B (zh) |
| WO (1) | WO2002045137A2 (zh) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102765573A (zh) * | 2010-09-16 | 2012-11-07 | 株式会社大福 | 搬运装置 |
| CN102916092A (zh) * | 2011-08-04 | 2013-02-06 | 政美应用股份有限公司 | 检测及分类晶片的装置及方法 |
| CN102130033B (zh) * | 2005-07-08 | 2014-05-14 | 交叉自动控制公司 | 工件支撑结构及其使用设备 |
| CN105097636A (zh) * | 2014-05-15 | 2015-11-25 | 英飞凌科技股份有限公司 | 晶片释放 |
| CN105619406A (zh) * | 2015-12-31 | 2016-06-01 | 北京七星华创电子股份有限公司 | 多指机械手片叉的校准方法 |
| CN106165056A (zh) * | 2014-04-17 | 2016-11-23 | 应用材料公司 | 基板载体 |
| CN111357097A (zh) * | 2017-09-28 | 2020-06-30 | 鲁道夫科技公司 | 晶圆级封装组件处理 |
| CN111392395A (zh) * | 2020-03-30 | 2020-07-10 | 武汉华星光电半导体显示技术有限公司 | 上料装置 |
| CN112236852A (zh) * | 2018-06-19 | 2021-01-15 | 科磊股份有限公司 | 开槽静电吸盘 |
Families Citing this family (44)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6986636B2 (en) * | 2000-06-09 | 2006-01-17 | Brooks Automation, Inc. | Device for positioning disk-shaped objects |
| US6824343B2 (en) * | 2002-02-22 | 2004-11-30 | Applied Materials, Inc. | Substrate support |
| DE10217028C1 (de) * | 2002-04-11 | 2003-11-20 | Nanophotonics Ag | Meßmodul für Waferfertigungsanlagen |
| AU2003245484A1 (en) * | 2002-06-14 | 2003-12-31 | Fortrend Engineering Corporation | Universal reticle transfer system |
| US6769861B2 (en) * | 2002-10-08 | 2004-08-03 | Brooks Automation Inc. | Apparatus for alignment and orientation of a wafer for processing |
| SG115602A1 (en) * | 2003-01-09 | 2005-10-28 | Disco Corp | Conveying device for a plate-like workpiece |
| JP3981885B2 (ja) * | 2003-05-20 | 2007-09-26 | 株式会社ダイフク | 搬送装置 |
| US7654596B2 (en) * | 2003-06-27 | 2010-02-02 | Mattson Technology, Inc. | Endeffectors for handling semiconductor wafers |
| TW200532043A (en) * | 2004-02-10 | 2005-10-01 | Ulvac Inc | Thin film forming apparatus |
| US6833717B1 (en) * | 2004-02-12 | 2004-12-21 | Applied Materials, Inc. | Electron beam test system with integrated substrate transfer module |
| US8668422B2 (en) * | 2004-08-17 | 2014-03-11 | Mattson Technology, Inc. | Low cost high throughput processing platform |
| US20060182535A1 (en) * | 2004-12-22 | 2006-08-17 | Mike Rice | Cartesian robot design |
| US7255747B2 (en) * | 2004-12-22 | 2007-08-14 | Sokudo Co., Ltd. | Coat/develop module with independent stations |
| US7798764B2 (en) | 2005-12-22 | 2010-09-21 | Applied Materials, Inc. | Substrate processing sequence in a cartesian robot cluster tool |
| US7819079B2 (en) * | 2004-12-22 | 2010-10-26 | Applied Materials, Inc. | Cartesian cluster tool configuration for lithography type processes |
| US7651306B2 (en) * | 2004-12-22 | 2010-01-26 | Applied Materials, Inc. | Cartesian robot cluster tool architecture |
| US8167522B2 (en) * | 2005-03-30 | 2012-05-01 | Brooks Automation, Inc. | Substrate transport apparatus with active edge gripper |
| US7374391B2 (en) * | 2005-12-22 | 2008-05-20 | Applied Materials, Inc. | Substrate gripper for a substrate handling robot |
| JP4636288B2 (ja) * | 2005-05-18 | 2011-02-23 | 株式会社村田製作所 | 位置決めステージ、それを用いたバンプ形成装置およびバンプ形成方法 |
| KR100631928B1 (ko) * | 2005-12-02 | 2006-10-04 | 삼성전자주식회사 | 웨이퍼 세정장치에서의 웨이퍼 가이드 |
| US20070231108A1 (en) * | 2006-04-04 | 2007-10-04 | Applied Materials, Inc. | Method and apparatus for transferring wafers |
| KR100809594B1 (ko) * | 2006-09-12 | 2008-03-04 | 세메스 주식회사 | 척킹부재 및 이를 포함하는 스핀헤드 |
| US8348255B2 (en) * | 2006-12-14 | 2013-01-08 | Is Technology Japan, Inc. | Disk holding apparatus and defect/foreign material detecting apparatus |
| US7694688B2 (en) | 2007-01-05 | 2010-04-13 | Applied Materials, Inc. | Wet clean system design |
| US20080166210A1 (en) * | 2007-01-05 | 2008-07-10 | Applied Materials, Inc. | Supinating cartesian robot blade |
| WO2008133149A1 (ja) * | 2007-04-23 | 2008-11-06 | Ulvac, Inc. | 支持部材およびキャリアと支持方法 |
| JP5206528B2 (ja) * | 2009-03-19 | 2013-06-12 | トヨタ自動車株式会社 | ワーク搬送用機器およびワーク搬送方法 |
| US8698099B2 (en) * | 2009-09-30 | 2014-04-15 | Kyocera Corporation | Attraction member, and attraction device and charged particle beam apparatus using the same |
| US9837295B2 (en) | 2010-04-15 | 2017-12-05 | Suss Microtec Lithography Gmbh | Apparatus and method for semiconductor wafer leveling, force balancing and contact sensing |
| US9859141B2 (en) | 2010-04-15 | 2018-01-02 | Suss Microtec Lithography Gmbh | Apparatus and method for aligning and centering wafers |
| JP5877016B2 (ja) * | 2011-08-26 | 2016-03-02 | 株式会社Screenホールディングス | 基板反転装置および基板処理装置 |
| US8556566B1 (en) * | 2011-09-30 | 2013-10-15 | WD Media, LLC | Disk stacking method and apparatus |
| US9136155B2 (en) * | 2011-11-17 | 2015-09-15 | Lam Research Ag | Method and device for processing wafer shaped articles |
| DE102012100825A1 (de) * | 2011-12-01 | 2013-06-06 | solar-semi GmbH | Vorrichtung zum Bearbeiten eines Substrats und Verfahren hierzu |
| US9431282B2 (en) * | 2011-12-27 | 2016-08-30 | Rudolph Technologies, Inc. | Wafer inversion mechanism |
| US20140064888A1 (en) * | 2012-09-06 | 2014-03-06 | Texas Instruments Incorporated | Appartaus for handling an electronic device and related methodology |
| CN102903661A (zh) * | 2012-10-25 | 2013-01-30 | 上海宏力半导体制造有限公司 | 晶圆末端执行器 |
| JP6186124B2 (ja) * | 2012-12-14 | 2017-08-23 | 東京応化工業株式会社 | 搬送アーム、搬送装置および搬送方法 |
| WO2016043750A1 (en) * | 2014-09-18 | 2016-03-24 | Halliburton Energy Services, Inc. | Electrically conductive pattern printer for downhole tools |
| USD803283S1 (en) | 2016-05-16 | 2017-11-21 | Veeco Instruments Inc. | Wafer handling assembly |
| KR102242812B1 (ko) | 2018-05-17 | 2021-04-22 | 세메스 주식회사 | 반송 유닛 및 이를 갖는 기판 처리 장치 |
| US12020974B2 (en) | 2019-03-13 | 2024-06-25 | Core Flow Ltd. | Circular wafer lateral positioning device |
| JP7005690B2 (ja) * | 2020-06-17 | 2022-02-10 | 株式会社Kokusai Electric | 基板処理装置、半導体装置の製造方法、およびプログラム |
| CN112858343B (zh) * | 2021-02-02 | 2021-11-16 | 西安中科微星光电科技有限公司 | 一种多功能硅基液晶芯片在线检测系统及方法 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4915564A (en) | 1986-04-04 | 1990-04-10 | Materials Research Corporation | Method and apparatus for handling and processing wafer-like materials |
| US5749469A (en) * | 1992-05-15 | 1998-05-12 | Fluoroware, Inc. | Wafer carrier |
| US5516732A (en) | 1992-12-04 | 1996-05-14 | Sony Corporation | Wafer processing machine vacuum front end method and apparatus |
| JP3143770B2 (ja) * | 1994-10-07 | 2001-03-07 | 東京エレクトロン株式会社 | 基板搬送装置 |
| US5700046A (en) * | 1995-09-13 | 1997-12-23 | Silicon Valley Group, Inc. | Wafer gripper |
| US5647626A (en) * | 1995-12-04 | 1997-07-15 | Taiwan Semiconductor Manufacturing Company, Ltd. | Wafer pickup system |
| US5746460A (en) * | 1995-12-08 | 1998-05-05 | Applied Materials, Inc. | End effector for semiconductor wafer transfer device and method of moving a wafer with an end effector |
| TW321192U (en) * | 1995-12-23 | 1997-11-21 | Samsung Electronics Co Ltd | A arm of robot for transporting semiconductor wafer |
| US5980194A (en) * | 1996-07-15 | 1999-11-09 | Applied Materials, Inc. | Wafer position error detection and correction system |
| WO2000002808A1 (en) | 1998-07-11 | 2000-01-20 | Semitool, Inc. | Robots for microelectronic workpiece handling |
| US5820329A (en) | 1997-04-10 | 1998-10-13 | Tokyo Electron Limited | Vacuum processing apparatus with low particle generating wafer clamp |
| KR100660416B1 (ko) | 1997-11-03 | 2006-12-22 | 에이에스엠 아메리카, 인코포레이티드 | 개량된 저질량 웨이퍼 지지 시스템 |
| US6116848A (en) * | 1997-11-26 | 2000-09-12 | Brooks Automation, Inc. | Apparatus and method for high-speed transfer and centering of wafer substrates |
| JP4404481B2 (ja) * | 1998-02-18 | 2010-01-27 | アプライド マテリアルズ インコーポレイテッド | 真空処理システム、ウェーハハンドラーおよびエンドエフェクタ |
| EP1114440B1 (de) | 1998-09-02 | 2007-12-12 | Tec-Sem AG | Vorrichtung und verfahren zum handhaben von einzelnen wafern |
| US6298280B1 (en) * | 1998-09-28 | 2001-10-02 | Asyst Technologies, Inc. | Method for in-cassette wafer center determination |
| US6143147A (en) | 1998-10-30 | 2000-11-07 | Tokyo Electron Limited | Wafer holding assembly and wafer processing apparatus having said assembly |
| JP2000260859A (ja) | 1999-03-09 | 2000-09-22 | Nikon Corp | 基板収納装置 |
| US6357996B2 (en) * | 1999-05-14 | 2002-03-19 | Newport Corporation | Edge gripping specimen prealigner |
-
2000
- 2000-11-29 US US09/725,823 patent/US6692219B2/en not_active Expired - Lifetime
-
2001
- 2001-11-16 TW TW090128565A patent/TW511136B/zh not_active IP Right Cessation
- 2001-11-20 EP EP02703165A patent/EP1340246A2/en not_active Withdrawn
- 2001-11-20 WO PCT/US2002/001545 patent/WO2002045137A2/en not_active Application Discontinuation
- 2001-11-20 JP JP2002547208A patent/JP4060185B2/ja not_active Expired - Lifetime
- 2001-11-20 CN CNA018199429A patent/CN1481577A/zh active Pending
- 2001-11-20 AU AU2002236801A patent/AU2002236801A1/en not_active Abandoned
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102130033B (zh) * | 2005-07-08 | 2014-05-14 | 交叉自动控制公司 | 工件支撑结构及其使用设备 |
| CN102765573B (zh) * | 2010-09-16 | 2015-06-17 | 株式会社大福 | 搬运装置 |
| CN102765573A (zh) * | 2010-09-16 | 2012-11-07 | 株式会社大福 | 搬运装置 |
| CN102916092A (zh) * | 2011-08-04 | 2013-02-06 | 政美应用股份有限公司 | 检测及分类晶片的装置及方法 |
| CN102916092B (zh) * | 2011-08-04 | 2015-12-02 | 政美应用股份有限公司 | 检测及分类晶片的装置及方法 |
| CN106165056A (zh) * | 2014-04-17 | 2016-11-23 | 应用材料公司 | 基板载体 |
| CN106165056B (zh) * | 2014-04-17 | 2018-12-11 | 应用材料公司 | 固持件、具有该固持件的载体以及用于固定基板的方法 |
| CN105097636B (zh) * | 2014-05-15 | 2018-05-22 | 英飞凌科技股份有限公司 | 晶片释放 |
| CN105097636A (zh) * | 2014-05-15 | 2015-11-25 | 英飞凌科技股份有限公司 | 晶片释放 |
| US10186445B2 (en) | 2014-05-15 | 2019-01-22 | Infineon Technologies Ag | Wafer releasing |
| CN105619406A (zh) * | 2015-12-31 | 2016-06-01 | 北京七星华创电子股份有限公司 | 多指机械手片叉的校准方法 |
| CN111357097A (zh) * | 2017-09-28 | 2020-06-30 | 鲁道夫科技公司 | 晶圆级封装组件处理 |
| US11809441B2 (en) | 2017-09-28 | 2023-11-07 | Onto Innovation Inc. | Wafer-level package assembly handling |
| CN112236852A (zh) * | 2018-06-19 | 2021-01-15 | 科磊股份有限公司 | 开槽静电吸盘 |
| CN112236852B (zh) * | 2018-06-19 | 2022-10-14 | 科磊股份有限公司 | 半导体晶片处置方法与装置 |
| CN111392395A (zh) * | 2020-03-30 | 2020-07-10 | 武汉华星光电半导体显示技术有限公司 | 上料装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20020064450A1 (en) | 2002-05-30 |
| WO2002045137A2 (en) | 2002-06-06 |
| TW511136B (en) | 2002-11-21 |
| EP1340246A2 (en) | 2003-09-03 |
| JP2004515073A (ja) | 2004-05-20 |
| US6692219B2 (en) | 2004-02-17 |
| JP4060185B2 (ja) | 2008-03-12 |
| AU2002236801A1 (en) | 2002-06-11 |
| WO2002045137A3 (en) | 2003-03-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN1481577A (zh) | 减少边缘接触的晶片搬运系统以及改进和使用该系统的方法 | |
| US6361648B1 (en) | Wafer transfer station for a chemical mechanical polisher | |
| US6612590B2 (en) | Apparatus and methods for manipulating semiconductor wafers | |
| JP5758628B2 (ja) | 一体化されたウェハ受渡し機構 | |
| JP5253511B2 (ja) | ワークピース製造方法及び装置 | |
| US6722834B1 (en) | Robot blade with dual offset wafer supports | |
| US5350427A (en) | Wafer retaining platen having peripheral clamp and wafer lifting means | |
| KR20010013423A (ko) | 원형콘베이어의 웨이퍼 이송 시스템 | |
| KR20100023821A (ko) | 관성 웨이퍼 센터링 엔드 이펙터 및 이송 장치 | |
| WO2000062334A1 (en) | Handling thin workpieces | |
| US7204888B2 (en) | Lift pin assembly for substrate processing | |
| JP7519822B2 (ja) | 収納モジュール、基板処理システムおよび消耗部材の搬送方法 | |
| KR100995845B1 (ko) | 칩 분류장치용 흡착이송장치 | |
| KR100706659B1 (ko) | 피씨비 어셈블리의 절단장치 | |
| KR101674539B1 (ko) | 레이저 가공 시스템, 레이저 가공 시스템의 픽커 장치 및 이를 이용한 가공 대상물의 이송 방법 | |
| US6767407B2 (en) | Auto-centering device for mechanical clamp | |
| JPH05212815A (ja) | タイヤビードの移載方法及びその装置 | |
| JPH01238135A (ja) | ウエハ搬送装置 | |
| JP4451970B2 (ja) | 被加工物輪郭認識装置を含むダイシング機 | |
| JP7236527B2 (ja) | ワークの保持装置、及び、ワークの保持方法 | |
| KR20100053826A (ko) | 유동 그리퍼를 포함하는 클램핑 장치 | |
| KR20230111596A (ko) | 기판 로더 | |
| KR20240055436A (ko) | 집체인 방식을 이용한 로더 및 리프팅 장치 | |
| KR200143987Y1 (ko) | 반도체 제조 공정용 스퍼터 시스템의 웨이퍼 핸들링 장치 | |
| JPS62141731A (ja) | ウエハハンドリング装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C02 | Deemed withdrawal of patent application after publication (patent law 2001) | ||
| WD01 | Invention patent application deemed withdrawn after publication |