JP3991987B2 - 車線逸脱報知装置 - Google Patents
車線逸脱報知装置 Download PDFInfo
- Publication number
- JP3991987B2 JP3991987B2 JP2004001956A JP2004001956A JP3991987B2 JP 3991987 B2 JP3991987 B2 JP 3991987B2 JP 2004001956 A JP2004001956 A JP 2004001956A JP 2004001956 A JP2004001956 A JP 2004001956A JP 3991987 B2 JP3991987 B2 JP 3991987B2
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- road surface
- traveling
- surface unevenness
- host vehicle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A21—BAKING; EDIBLE DOUGHS
- A21D—TREATMENT OF FLOUR OR DOUGH FOR BAKING, e.g. BY ADDITION OF MATERIALS; BAKING; BAKERY PRODUCTS
- A21D13/00—Finished or partly finished bakery products
- A21D13/40—Products characterised by the type, form or use
- A21D13/41—Pizzas
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Food Science & Technology (AREA)
- Vehicle Body Suspensions (AREA)
- Traffic Control Systems (AREA)
- Control Of Driving Devices And Active Controlling Of Vehicle (AREA)
Description
また、近年、インフラストラクチャ(インフラともいう。)でも、車線からの車両の逸脱や路外への車両の逸脱を防止することを目的として、道路脇に人工的な凹凸部分(ランブルストリップと称す。)を設けている道路が多くなってきている。このようなインフラにより、車輪が道路脇に設けた凹凸部分の上を車輪が通過することで車内に振動や音が発生するので、この振動や音により運転者に自車両の逸脱を認識させることができる。
本発明は、前述の問題に鑑みてなされたものであり、道路脇に設けた人工的な凹凸部分の上を自車両が通過したことを確実に運転者に伝えて、運転者に自車両が逸脱傾向にあることを知らせる車線逸脱報知装置の提供を目的とする。
第1の実施形態は、本発明の車線逸脱報知装置を、自動変速機とコンベンショナルディファレンシャルギヤとを搭載し、前後輪とも左右輪の制動力を独立制御可能な制動装置を搭載する後輪駆動車両に適用したものである。
図中の符号1はブレーキペダル、2はブースタ、3はマスタシリンダ、4はリザーバである。通常は、運転者によるブレーキペダル1の踏込み量に応じて、マスタシリンダ3で昇圧された制動流体圧を各車輪5FL〜5RRの各ホイールシリンダ6FL〜6RRに供給する。また、このマスタシリンダ3と各ホイールシリンダ6FL〜6RRとの間には制動流体圧制御回路7が介装されており、この制動流体圧制御回路7によって、各ホイールシリンダ6FL〜6RRの制動流体圧を個別に制御することも可能となっている。
また、この車両には、ディスプレイやスピーカを備えた車内情報提示装置25が備えられている。車内情報提示装置25は、自車両に車線逸脱傾向があるときには、コントロールユニット8からの指令に応じて音声やブザー音で運転者に警告を提示する。本実施形態では、車内情報提示装置25は、特に自車両が道路端にいる場合に、警報表示をしたり、ブザー音を出力するようになっている。
続いてステップS2において、車速Vを算出する。具体的には、前記ステップS1で読み込んだ車輪速度Vwi(i=FL〜RR)に基づいて、下記(1)式により車速Vを算出する。
V=(VwRL+VwRR)/2
後輪駆動の場合
V=(VwFL+VwFR)/2
・・・(1)
ここで、VwFL,VwFRは左右前輪それぞれの車輪速度であり、VwRL,VwRRは左右後輪それぞれの車輪速度である。すなわち、この(1)式では、従動輪の車輪速の平均値として車速Vを算出している。なお、本実施形態では、後輪駆動の車両であるので、後者の式、すなわち前輪の車輪速度により車速Vを算出する。
続いてステップS3において、自車両が道路白線上又はその近傍に設けられている道路の凹凸部分(以下、路面凹凸という。)の上を走行していることを検出する。具体的には、車輪速の変動より、自車両が路面凹凸の上を走行しているか否かを判定する。
この車輪速の変動は、路面凹凸の間隔、車輪速度センサ23FL〜23RRの分解能及びタイヤやサスペンションの特性等により定まる。例えば、車輪速度センサ23FL〜23RRがコイル式の車輪速センサの場合、車輪速センサの分解能は、車輪1回転当たりに発生するパルスの数(=歯数)に依存することになり、車輪速の変動は、そのような車輪速センサの分解能により定まる。
先ず、車輪加速度dVwi(i=FL〜RR)を下記(2)式により算出する。
dVwi=Kg×(Vw20i−Vw0i)/ΔT ・・・(2)
ここで、Vw0iは、今回の演算処理を実行したときに検出された車輪速であり、Vw20iは、この演算処理が前回実行されたときに検出された車輪速である。演算処理を例えば20msec.毎の所定サンプリング時間ΔT毎にタイマ割込によって実行しているので、Vw20iは、20msec.前の車輪速になる。また、Kgは単位換算係数であり、ΔTは演算周期(例えば20msec.)である。
ここでは、車輪加速度dVwiの周期を判定するためのカウンタTsと、そのような車輪加速度dVwiの周期が所定時間継続しているかを判定するための凹凸判断タイマTrsとを用いる。これらカウンタTsと凹凸判断タイマTrsとを、車輪加速度dVwiと判断しきい値Slimitとの関係において、次のように変化させる。
ここで、図7は、判断しきい値Slimitの設定例を示し、図8は、初期セット値Tsoの設定例を示す。
特に図9において区間Cについて説明すると、同図中(A)に示すように車輪加速度dVwiが判断しきい値Slimitより大きくなると、同図中(B)に示すようにカウンタTsが初期セット値Tsoとされるとともに、そのカウンタTsが徐々に小さくされ、また同図中(D)に示すように凹凸判断タイマTrsが徐々に大きくされる。
ちなみに、車輪速度Vwiが一定の周期(Tso−TsL)で変動しない場合、例えば路面に落ちているものを踏むことで、車輪速度Vwiが一時的に大きく変動した場合、図9の区間A、Bに示すように、一時的にカウンタTsが初期セット値Tsoになる。しかし、カウンタTsが徐々に小さくされて0となるので、凹凸判断タイマTrsがすぐに0となってしまう。
続いて、各車輪5FL〜5RRについて、凹凸判断タイマTrsが判断しきい値Trslmtより大きいか否かを判定する。ここで、凹凸判断タイマTrsが判断しきい値Trslmtより大きい場合、凹凸判断フラグFoti(i=FL〜RR)を“1”のセット状態、つまり車輪が路面凹凸の上を走行していることを示す状態とし、そうでない場合には凹凸判断フラグFotiを“0”のリセット状態とする。
ちなみに、単に自車両の車輪速度Vwiが変動したときに、自車両の走行車線の道路白線上に設けられている路面凹凸の上を自車両が走行していることを検出する方法では、悪路走行時等、走行路全体に路面凹凸があるときにも、前記道路白線上に設けられている路面凹凸の上を自車両が走行していると誤検出してしまう恐れがある。
ここでは、左右前輪5FL,5FRのうち一方の前輪について路面凹凸を検出し、かつ、他方の前輪について路面凹凸が検出されない場合に自車両が当該路面凹凸を検出した側の道路端にいると判定する。具体的には、ステップS4及びステップS5において、次のような処理によりその判定を行う。
続いてステップS5において、前記ステップS4で得た道路端判断フラグFdwに基づいて、自車両が路面凹凸の上を走行していること、すなわち自車両が道路端を走行していることを判定する。具体的には、左前輪5FLに対応する凹凸判断フラグFotFLと右前輪5FRに対応する凹凸判断フラグFotFRとのいずれか一方だけが“1”のセット状態であるときに、道路端判断フラグFdwを“1”又は“−1”のセット状態とするため、前左右輪5FL,5FRのいずれか一方だけが路面凹凸を踏んでいるときだけ、道路白線上に設けられている路面凹凸の上を自車両が走行していること、すなわち自車両が道路端を走行していることが検出される。
ステップS6では、前記ステップS4又はステップS5で道路端にいると判定がなされてからの継続時間Ttotalを算出する。すなわち、道路端判断フラグFdw≠0に設定されてからの時間を積算する。
図10は、継続時間Ttotalに応じて特性指令値Drsを設定するための特性図の一例を示す。この図10に示すように、継続時間Ttotalが増加するときにおいて、継続時間Ttotalが短い場合には、継続時間Ttotalによらず特性指令値Drsを小さい値で一定値にし、継続時間Ttotalがある時間になったとき、特性指令値Drsを継続時間Ttotalに比例させて増加させて、継続時間Ttotalがさらにある時間になったときに、継続時間Ttotalによらず特性指令値Drsを大きい値で一定値に設定する。このとき、特性指令値Drsとショックアブソーバ機構24FL〜24RRの特性との関係は、特性指令値Drsが大きくなるほど、ショックアブソーバ機構24FL〜24RRにおけるサスペンション特性の一つである減衰力が強くなる、といった関係になっている。
先ず、継続時間Ttotalと所定のしきい値Ts1とを比較する。そして、継続時間Ttotalが所定のしきい値Ts1未満の場合(Ttotal<Ts1)、警報表示の切り替え指令値Hrsを“1”に設定する(Hrs=1)。また、継続時間Ttotalが所定のしきい値Ts1以上の場合(Ttotal≧Ts1)、警報表示の切り替え指令値Hrsを“2”に設定する(Hrs=2)。ここで、“1”の切り替え指令値Hrsは、警報表示として、「△」表示の点滅を行う指令値である。また、“2”の切り替え指令値Hrsは、警報表示として、「△」表示の点灯を行う指令値である。なお、切り替え指令値Hrsが“0”である場合には、警報表示は行わない。
図11は、継続時間Ttotalに応じてブザー音量指令値Srsを設定するための特性図の一例を示す。この図11に示すように、継続時間Ttotalが0のとき、ブザー音量指令値Srsを0にして、そして、継続時間Ttotalが0から増加するときにおいて、継続時間Ttotalが短い場合には、継続時間Ttotalによらずブザー音量指令値Srsを小さい値で一定値にし、継続時間Ttotalがある時間になったとき、ブザー音量指令値Srsを継続時間Ttotalに比例させて増加させて、継続時間Ttotalがさらにある時間になったときに、継続時間Ttotalによらずブザー音量指令値Srsを大きい値で一定値に設定する。このとき、ブザー音量指令値Srsとブザー音の音量との関係は、ブザー音量指令値Srsが大きくなるほど、ブザー音の音量が大きくなる、といった関係になっている。そして、ステップS9に進む。
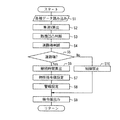
以上のようにコントロールユニット8は演算処理を行っている。概略すると次のような処理になる。
続いて、自車両が道路端にいるか否かを判定する(ステップS4、ステップS5)。
ここで、自車両が道路端にいる場合、その道路端に自車両がいる継続時間Ttotalに応じて、ショックアブソーバ機構24FL〜24RRにおけるサスペンション特性を設定する特性指令値Drs、車内情報提示装置25に警報表示する警報表示の切り替え指令値Hrs、ブザー音の音量を設定するブザー音量指令値Srsを設定する(ステップS6〜ステップS8)。具体的には、継続時間Ttotalが長くなるほど、特性指令値Drs及びブザー音量指令値Srsを大きい値にし、警報表示の切り替え指令値Hrsを“1”にする。また、自車両が道路端にいない場合、指令値を0にするなどして、そのような指令値の変更は行わない(ステップS10)。
このような処理により、自車両が道路端にいる場合、ショックアブソーバが硬くなり、車内情報提示装置25からブザー音が出力されるようになり、さらに、その道路端に自車両がいる継続時間Ttotalが長くなると、ショックアブソーバがより硬くなっていき、また、ブザー音の音量がより大きくなっていき、さらに車内情報提示装置25に警報表示されるようになる。
図12は、路面凹凸の上を走行している場合の車両挙動を示す。同図中(A)は従来における車両挙動を示し、同図中(B)は本発明を適用した場合の車両挙動を示す。
次に第1の実施形態における効果を説明する。
さらに、前述したように、サスペンション特性の一つとしてのショックアブソーバの減衰力を大きくして、すなわち硬くして、路面凹凸の上を自車両が走行していることに起因し車体に入力される振動を増幅している。このように、アクチュエータ等の新たな装置を設けることなく、路面凹凸の上を自車両が走行していることに起因し車体に入力される振動を増幅している。これにより、装置コストを高くすることなく、路面凹凸の上を自車両が走行していることに起因し車体に入力される振動の増幅を実現できる。
また、前述したように、継続時間Ttotalが長くなるほど、ショックアブソーバを硬くし、また、ブザー音の音量を大きくし、さらに警報表示するようにしている。これにより、運転者に自車両が道路端を走行していることを確実に認識させることを可能とする。その一方で、自車両が道路端を走行していることを運転者が早期に認識し、自車両を路面凹凸の上の走行から回避するような場合には、車両への入力振動が必要以上に大きくならないように、またブザー音が必要以上に大きくならないように、さらに不要な警報表示がなされないようにすることができる。
また、そのように車輪速度センサ23FL〜23RRが検出した車輪速の変動により、自車両が路面凹凸の上を走行していることを検出するが、最終的には、左右前輪5FL,5FRのうち一方の前輪について路面凹凸を検出している場合、道路端を走行していると判断している。すなわち、左右前輪5FL,5FRのうち一方において所定の車輪速の変動を示した場合、最終的に自車両が路面凹凸の上を走行していると判断している。これにより、単に悪路走行等で車輪速の変動があっただけで、路面凹凸の上を走行していると判断しないように、或いは自車両が逸脱傾向にあると判断しないようにすることができる。
第2の実施形態も、本発明の車線逸脱報知装置を、自動変速機とコンベンショナルディファレンシャルギヤとを搭載し、前後輪とも左右輪の制動力を独立制御可能な制動装置を搭載する後輪駆動車両に適用したものである。
前述の第1の実施形態では、サスペンション特性や車内情報提示装置25による警報表示及びブザー音の音量の設定を、継続時間Ttotalに基づいて行っている。これに対して、第2の実施形態では、例えば、ヨーレートや横加速度等の走行状態より安全度(或いは走行安定性)を判断し、その安全度に応じてサスペンション特性や車内情報提示装置25による警報表示及びブザー音の音量の設定を行うものである。
この第2の実施形態において、コントロールユニット8は、前述の第1の実施形態と同様に、ステップS1〜ステップS5の処理を行う。そして、第2の実施形態の特有の処理として、ステップS21〜ステップS23の処理を行う。
ステップS21では、前記ステップS1で得たヨーレートφ’及びステップS2で得た車速Vに基づいて安全度Wrsを設定する。
図14は、ヨーレートφ’及び車速Vに基づいて安全度Wrsを設定するための特性図の一例を示す。
図15は、安全度Wrsに応じて特性指令値Drsを設定するための特性図の一例を示す。この図15に示すように、安全度Wrsが高い場合には、安全度Wrsによらず特性指令値Drsを小さい値で一定値にし、安全度Wrsがある値になったとき、特性指令値Drsを安全度Wrsに比例させて増加させて、安全度Wrsがある低い値になったときに、安全度Wrsによらず特性指令値Drsを大きい値で一定値に設定する。
すなわち、安全度Wrsと所定のしきい値Ws1とを比較する。そして、安全度Wrsが所定のしきい値Ws1より大きい場合(Wrs>Ws1)、警報表示の切り替え指令値Hrsを1に設定する(Hrs=1)。また、安全度Wrsが所定のしきい値Ws1以下の場合(Wrs≦Ws1)、警報表示の切り替え指令値Hrsを2に設定する(Hrs=2)。ここで、1の切り替え指令値Hrsは、警報表示として、「△」表示の点滅を行う指令値である。また、2の切り替え指令値Hrsは、警報表示として、「△」表示の点灯を行う指令値である。なお、切り替え指令値Hrsが“0”である場合には、警報表示は行わない。
次の第2の実施形態における効果を説明する。
前述したように、自車両が路面凹凸の上を走行している場合、車速V及びヨーレートφ’に応じて安全度Wrsを設定している。具体的には、自車両が路面凹凸の上を走行している場合において、車速Vが高くなるほど、またヨーレートφ’が大きくなるほど、安全度Wrsを低くしている(図14参照)。そして、そのように設定した安全度Wrsが低くなるほど、ショックアブソーバを硬くし、また、ブザー音の音量を大きくし、さらに警報表示するようにしている。
前述の実施形態では、ショックアブソーバ機構24FL〜24RRの減衰特性が無段階調整可能なものである場合を説明した。しかし、これに限定されるものではない。例えば、多段階、例えば2段や3段等で減衰特性を切り替え可能なショックアブソーバを用いてもよい。この場合、第1の実施形態では、継続時間Ttotalに応じて、段階的に減衰特性を切り替えていくようにする。また、第2の実施形態では、安全度Wrsに応じて、段階的に減衰特性を切り替えていくようにする。
また、前述の実施形態では、車内情報提示装置25の警報表示の切り替えを2種類の切り替えとしている場合を説明した。しかし、これに限定されるものではない。例えば、警報表示の切り替えを、表示の色や大きさを変化させることで行ってもよい。
また、前述の第2の実施形態では、車速やヨーレートに基づいて、逸脱傾向を示すパラメータとなる安全度Wrsを得る場合を説明した。しかし、これに限定されるものではない。例えば、車両前方の車線を認識するカメラを搭載して、そのカメラにより、車線に対する自車両のヨー角やカーブ曲率を得て、それら情報に基づいて、安全度Wrsを得てもよい。また、自車両の横加速度に基づいて、安全度Wrsを得てもよい。
6FL〜6RR ホイールシリンダ
7 制動流体圧制御回路
8 コントロールユニット
9 エンジン
12 駆動トルクコントロールユニット
13 CCDカメラ
14 カメラコントローラ
15 障害物検出レーダ
16 加速度センサ
17 ヨーレートセンサ
18 マスタシリンダ圧センサ
19 アクセル開度センサ
20 操舵角センサ
21 方向指示スイッチ
23FL〜23RR 車輪速度センサ
24FL〜24RR ショックアブソーバ機構
Claims (5)
- 自車両が車線区分線近傍又は車線区分線上に設けられている路面凹凸の上を走行していることを検出する路面凹凸検出手段と、
前記路面凹凸検出手段が自車両が路面凹凸の上を走行していることを検出した場合、サスペンションの減衰力を変更して、当該路面凹凸の上を自車両が走行していることに起因し車体に入力される振動を増幅する車体入力振動増幅手段と、を備え、
前記車体入力振動増幅手段は、自車両が路面凹凸の上を走行している時間が長くなるほど、前記サスペンションの減衰力を大きくして、前記振動の増幅度合いを大きくすることを特徴とする車線逸脱報知装置。 - 自車両の逸脱傾向を検出する逸脱傾向検出手段を備えており、
前記車体入力振動増幅手段は、前記逸脱傾向検出手段が検出した逸脱傾向が高くなるほど、前記サスペンションの減衰力を大きくして、前記振動の増幅度合いを大きくすることを特徴とする請求項1記載の車線逸脱報知装置。 - 自車両の車輪速度を検出する車輪速度検出手段を備えており、
前記路面凹凸検出手段は、前記車輪速度検出手段が検出した車輪速度に基づいて、自車両が車線区分線近傍又は車線区分線上に設けられている路面凹凸の上を走行していることを検出することを特徴とする請求項1又は2記載の車線逸脱報知装置。 - 前記路面凹凸検出手段は、前記車輪速度検出手段が検出した車輪速度のうち左右輪のいずれか一方の車輪速度が変動する場合、自車両が車線区分線近傍又は車線区分線上に設けられている路面凹凸の上を走行していることを検出することを特徴とする請求項3記載の車線逸脱報知装置。
- 前記路面凹凸検出手段は、前記車輪速度検出手段が検出した車輪速度が自車両の走行速度に応じて一定の周期で変動する場合、自車両が車線区分線近傍又は車線区分線上に設けられている路面凹凸の上を走行していることを検出することを特徴とする請求項3又は4記載の車線逸脱報知装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004001956A JP3991987B2 (ja) | 2004-01-07 | 2004-01-07 | 車線逸脱報知装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2004001956A JP3991987B2 (ja) | 2004-01-07 | 2004-01-07 | 車線逸脱報知装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2005193774A JP2005193774A (ja) | 2005-07-21 |
| JP3991987B2 true JP3991987B2 (ja) | 2007-10-17 |
Family
ID=34817323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2004001956A Expired - Fee Related JP3991987B2 (ja) | 2004-01-07 | 2004-01-07 | 車線逸脱報知装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP3991987B2 (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2007030036A1 (en) * | 2005-09-06 | 2007-03-15 | Volvo Lastvagnar Ab | A method and a system for alerting a driver of a vehicle of a departure from a driving area in a lane |
| JP5526717B2 (ja) * | 2009-02-27 | 2014-06-18 | 日産自動車株式会社 | 車両用運転操作補助装置、車両用運転操作補助方法および自動車 |
| JP2010221995A (ja) * | 2009-02-27 | 2010-10-07 | Nissan Motor Co Ltd | 車両用運転操作補助装置、車両用運転操作補助方法および自動車 |
| DE102010011093A1 (de) * | 2010-03-11 | 2011-09-15 | Daimler Ag | Verfahren zur Bestimmung einer Fahrzeugaufbaubewegung |
| CN104864878B (zh) * | 2015-05-22 | 2017-07-18 | 汪军 | 基于电子地图的路况物理信息绘制及查询方法 |
| JP6449187B2 (ja) | 2016-03-16 | 2019-01-09 | 本田技研工業株式会社 | 車両のサスペンション装置 |
| JP6564411B2 (ja) * | 2017-03-16 | 2019-08-21 | 株式会社Subaru | 車両制御装置 |
| JP6521469B2 (ja) * | 2017-09-22 | 2019-05-29 | 株式会社Subaru | 伝達量制御装置 |
| JP2018158729A (ja) * | 2018-07-17 | 2018-10-11 | 本田技研工業株式会社 | 車両のサスペンション装置 |
| CN114834473A (zh) * | 2022-05-23 | 2022-08-02 | 浙江吉利控股集团有限公司 | 车道偏离报警方法、控制装置及系统 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60596A (ja) * | 1983-06-16 | 1985-01-05 | 株式会社デンソー | 路面状態識別装置 |
| JP2603072Y2 (ja) * | 1993-03-22 | 2000-02-14 | 日産ディーゼル工業株式会社 | 車両用サスペンションの減衰力制御装置 |
| JPH103598A (ja) * | 1996-06-17 | 1998-01-06 | Toyota Motor Corp | 走路逸脱検出装置 |
| US6014595A (en) * | 1997-12-23 | 2000-01-11 | Honda Giken Kogyo Kabushiki Kaisha | Determination of vehicle assistance from vehicle vibration that results when the vehicle contacts vibration generating structures on the road |
| JP2000251171A (ja) * | 1999-02-26 | 2000-09-14 | Toyota Motor Corp | 車両の車線逸脱警告装置 |
| JP2001341599A (ja) * | 2000-05-31 | 2001-12-11 | Nissan Motor Co Ltd | 車線逸脱警報装置 |
| JP3736413B2 (ja) * | 2001-09-28 | 2006-01-18 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP3826758B2 (ja) * | 2001-10-05 | 2006-09-27 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP4079028B2 (ja) * | 2003-05-12 | 2008-04-23 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP3979339B2 (ja) * | 2003-05-12 | 2007-09-19 | 日産自動車株式会社 | 車線逸脱防止装置 |
| JP3979382B2 (ja) * | 2003-12-03 | 2007-09-19 | 日産自動車株式会社 | 車線逸脱防止装置 |
-
2004
- 2004-01-07 JP JP2004001956A patent/JP3991987B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2005193774A (ja) | 2005-07-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4389567B2 (ja) | 車線逸脱防止装置 | |
| JP3979382B2 (ja) | 車線逸脱防止装置 | |
| JP3979339B2 (ja) | 車線逸脱防止装置 | |
| JP4496760B2 (ja) | 車線逸脱防止装置 | |
| JP4534754B2 (ja) | 車線逸脱防止装置 | |
| JP5359516B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP4748122B2 (ja) | 車線逸脱防止装置 | |
| JP4496759B2 (ja) | 車線逸脱防止装置 | |
| JP3606276B2 (ja) | 車線逸脱防止装置 | |
| US9041805B2 (en) | Vibration applying structure detecting device and vehicle control device | |
| EP1527941B1 (en) | Lane departure prevention apparatus | |
| JP2004322787A (ja) | 車線逸脱防止装置 | |
| JP4650362B2 (ja) | 車線逸脱防止装置 | |
| JP5359092B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP3991987B2 (ja) | 車線逸脱報知装置 | |
| JP4062330B2 (ja) | 車線逸脱防止装置 | |
| JP5387204B2 (ja) | 車両運転支援装置及び車両運転支援方法 | |
| JP2006175979A (ja) | 車線逸脱防止装置 | |
| JP3918722B2 (ja) | 車線逸脱防止装置 | |
| JP4466365B2 (ja) | 車線逸脱防止装置 | |
| JP3891102B2 (ja) | 車線逸脱防止装置 | |
| JP4600038B2 (ja) | 車線逸脱防止方法及びその装置 | |
| JP5131074B2 (ja) | 車線逸脱防止装置及び車線逸脱防止方法 | |
| JP2006044317A (ja) | 車線逸脱防止装置 | |
| JP2005182406A (ja) | 車線逸脱防止装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20050726 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20061226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20070227 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070412 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20070703 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20070716 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100803 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |