JP3834077B2 - 内燃機関の燃料調量制御装置 - Google Patents
内燃機関の燃料調量制御装置 Download PDFInfo
- Publication number
- JP3834077B2 JP3834077B2 JP14786695A JP14786695A JP3834077B2 JP 3834077 B2 JP3834077 B2 JP 3834077B2 JP 14786695 A JP14786695 A JP 14786695A JP 14786695 A JP14786695 A JP 14786695A JP 3834077 B2 JP3834077 B2 JP 3834077B2
- Authority
- JP
- Japan
- Prior art keywords
- signal
- internal combustion
- combustion engine
- fuel
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Lifetime
Links
- 239000000446 fuel Substances 0.000 title claims description 170
- 238000002485 combustion reaction Methods 0.000 title claims description 67
- 230000008859 change Effects 0.000 claims description 112
- 239000000203 mixture Substances 0.000 claims description 100
- 238000012937 correction Methods 0.000 claims description 57
- 238000002347 injection Methods 0.000 claims description 41
- 239000007924 injection Substances 0.000 claims description 41
- 230000003044 adaptive effect Effects 0.000 claims description 22
- 230000001052 transient effect Effects 0.000 claims description 13
- 230000008878 coupling Effects 0.000 claims description 3
- 238000010168 coupling process Methods 0.000 claims description 3
- 238000005859 coupling reaction Methods 0.000 claims description 3
- 241000158728 Meliaceae Species 0.000 claims 2
- 238000000034 method Methods 0.000 description 49
- 238000004364 calculation method Methods 0.000 description 24
- 238000010586 diagram Methods 0.000 description 13
- 230000015654 memory Effects 0.000 description 10
- 230000001133 acceleration Effects 0.000 description 9
- 230000008569 process Effects 0.000 description 9
- OKTJSMMVPCPJKN-UHFFFAOYSA-N Carbon Chemical compound [C] OKTJSMMVPCPJKN-UHFFFAOYSA-N 0.000 description 8
- 230000015572 biosynthetic process Effects 0.000 description 7
- 230000007423 decrease Effects 0.000 description 6
- 238000010790 dilution Methods 0.000 description 6
- 239000012895 dilution Substances 0.000 description 6
- 230000006870 function Effects 0.000 description 6
- 238000005259 measurement Methods 0.000 description 6
- 230000006978 adaptation Effects 0.000 description 5
- 239000007789 gas Substances 0.000 description 5
- 230000007935 neutral effect Effects 0.000 description 5
- 230000003247 decreasing effect Effects 0.000 description 4
- 230000003111 delayed effect Effects 0.000 description 4
- 230000032683 aging Effects 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 3
- 239000002828 fuel tank Substances 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 230000009467 reduction Effects 0.000 description 3
- LFQSCWFLJHTTHZ-UHFFFAOYSA-N Ethanol Chemical compound CCO LFQSCWFLJHTTHZ-UHFFFAOYSA-N 0.000 description 2
- 230000003321 amplification Effects 0.000 description 2
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 2
- 238000004140 cleaning Methods 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000003199 nucleic acid amplification method Methods 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 229910052760 oxygen Inorganic materials 0.000 description 2
- 239000001301 oxygen Substances 0.000 description 2
- 230000000737 periodic effect Effects 0.000 description 2
- 239000013641 positive control Substances 0.000 description 2
- 230000000630 rising effect Effects 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 238000009835 boiling Methods 0.000 description 1
- 238000003763 carbonization Methods 0.000 description 1
- 239000003054 catalyst Substances 0.000 description 1
- 239000000567 combustion gas Substances 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 239000000498 cooling water Substances 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 238000011156 evaluation Methods 0.000 description 1
- 238000001704 evaporation Methods 0.000 description 1
- 230000008020 evaporation Effects 0.000 description 1
- 239000010763 heavy fuel oil Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000013642 negative control Substances 0.000 description 1
- 238000003359 percent control normalization Methods 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 230000001502 supplementing effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
Images























Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/04—Introducing corrections for particular operating conditions
- F02D41/047—Taking into account fuel evaporation or wall wetting
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1438—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor
- F02D41/1477—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the regulation circuit or part of it,(e.g. comparator, PI regulator, output)
- F02D41/148—Using a plurality of comparators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02D—CONTROLLING COMBUSTION ENGINES
- F02D41/00—Electrical control of supply of combustible mixture or its constituents
- F02D41/02—Circuit arrangements for generating control signals
- F02D41/14—Introducing closed-loop corrections
- F02D41/1438—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor
- F02D41/1444—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases
- F02D41/1454—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases the characteristics being an oxygen content or concentration or the air-fuel ratio
- F02D41/1456—Introducing closed-loop corrections using means for determining characteristics of the combustion gases; Sensors therefor characterised by the characteristics of the combustion gases the characteristics being an oxygen content or concentration or the air-fuel ratio with sensor output signal being linear or quasi-linear with the concentration of oxygen
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Electrical Control Of Air Or Fuel Supplied To Internal-Combustion Engine (AREA)
- Combined Controls Of Internal Combustion Engines (AREA)
Description
【産業上の利用分野】
本発明は、内燃機関の燃料調量制御装置に関する。
【0002】
【従来の技術】
とりわけ非定常態動作の際に内燃機関の空燃比を一定に保持するために、気筒の空気充填に相応する噴射燃料量が、吸気管内面及び吸気弁表面に付着している壁面燃料膜の形成又は減少を考慮した値により補正されなければならない。この形式の壁面燃料膜補償は、例えばドイツ特許出願公開第3939548号公報から公知である。
【0003】
しかし、このような方法のパラメータの選択は、内燃機関の老化状態と、使用燃料の種類とに依存する。非定常状態動作の際の壁面燃料膜特性は、吸気弁の炭化の結果として、又はこの方法を校正するために使用された燃料と異なる燃料によりタンクを充填する結果として大幅に変化することがある。その結果、排気ガス放出及び走行特性が劣化する。
【0004】
従って例えばドイツ特許出願公開第4243449号公報及びドイツ特許出願公開第4323244号公報には、非定常状態動作の際の空燃比の変化を基礎に、それぞれの燃料と内燃機関の炭化状態とに壁面燃料膜補償を動作の際に適応する適応方法が開示されている。しかしこれらの方法は、現在通常使用されているネルンストセンサより大幅にコストが大きい線形λセンサの使用を必要とする。
【0005】
ドイツ特許出願公開第4115211号公報には、この欠点を除去した異なる方法が開示されている。しかしこの場合、非定常状態プロセスの際にλ制御をスイッチオフする必要があり、これにより排気ガス放出が劣化さることがある。
【0006】
【発明が解決しようとする課題】
本発明の課題は、上記の欠点を除去することにある。
【0007】
【課題を解決するための手段】
上記課題は本発明により、基本噴射量信号を、内燃機関の動作状態と、動作中のλ制御により形成される混合気補正のための信号とを基礎にして形成し、ただし、該信号は所望値からの空燃比の偏差を補正するものであり、過渡補償信号を形成し、過渡補償信号を、噴射燃料量信号を形成するために基本噴射量信号に論理結合し、適応補正信号を、過渡補償信号を求める際に考慮し、適応補正信号をλ制御の動作中に混合気補正信号と基準信号との比較により形成することにより解決される。
【0008】
本発明は、壁面燃料膜補償パラメータを、λ制御動作と、現在通常使用されている小コストのネルンストセンサの使用とにより適応することを可能にする。このようにして前記欠点が除去される。
【0009】
現在の内燃機関制御ではいわゆる2位置制御が使用され、この場合、空燃比と制御器の操作量とが、それらの所望値の回りを周期的に振動する。本明細書に記載の適応方法は、これらの制御振動の振幅を観察する。正常値からの振幅の明瞭な偏差が検出された場合、空燃比の重大な障害が、明らかに存在する。同時に、負荷又は回転に変化が発生した場合、壁面燃料膜特性に変化が発生したとの結論が出され、壁面燃料膜補償パラメータのうちの1つ又は複数のパラメータが、適応される。
【0010】
【実施例】
次に本発明を実施例に基づき図を用いて詳細に説明する。
【0011】
図1は、内燃機関と、噴射時間を計算する制御装置とを示す。
【0012】
吸気管102の中に流入する空気量mlは、空気量センサ106(ホットワイヤまたはホットフィルムセンサ)により検出され、その空気量信号mlは制御装置122に供給される。絞り弁110の位置wdkは、センサ111により測定される。
【0013】
空気量センサ106の代りに、吸気管psを検出するセンサ112を使用することもできる。
【0014】
空気・燃料混合気は、内燃機関100により吸込まれる。燃焼ガスは排気系統104の中に流入する。排気系統104で残留酸素濃度が、λセンサ116により測定される。λセンサ116の排気ガス信号電圧usは、制御装置122に供給される。更に、内燃機関ブロック100には、内燃機関温度tmot(通常は冷却水の温度)を検出する温度センサ119と、クランクシャフト位置及び回転数nとを検出するセンサ118とが設けられている。
【0015】
制御装置122により計算された燃料量(噴射時間te)は、内燃機関に噴射弁114を介して供給される。共通配置噴射弁114の代りに個別の噴射弁を、各気筒の吸気管の中に取付けることも可能である。更に、制御装置は、点火時間を定め、点火プラグ120のための点火コイルを作動する。
【0016】
燃料タンク通気孔の活性炭フィルタ121は、内燃機関が作動している間は新鮮な空気により洗浄され、洗浄によりフィルタから排出された空気・燃料混合気は、導管124を介して吸気管の中に導入され、次いで内燃機関の中で燃焼される。その結果、内燃機関に供給される混合気の組成は、乱される。この乱れを計量して、できるだけ補償できるように、スポットバルブ123を用いての活性炭フィルタの洗浄は、内燃機関制御装置122から制御される。
【0017】
図2は、噴射時間計算回路のブロック回路図である。
【0018】
まず初めにブロック200で、1つの気筒の瞬時の空気装填(負荷)tlが、例えば吸気管圧力ps及び回転数nから計算される。このために使用される方法は、従来技術であり、本明細書では詳細に説明しない。負荷信号tlの数値は、理論空燃比を調整するために必要な噴射時間に相応する場合好適である。
【0019】
ブロック201で、とりわけλ制御のために重要な動作状態”全負荷”B_vl及び”エンジンブレーキ動作時における燃料の遮断”B_saは、絞り弁の開度wdk及び回転数から求められる。このための簡単な方法が、図4に詳細に示されている。
【0020】
ブロック202は、λ制御を示す。λ制御の役割は、補正係数frを求めてこの補正係数frを乗算点204で負荷tlと乗算することにより、(例えば誤差のある吸気管圧力信号に起因する)負荷計算における誤差を補償することにあり、又は、(例えば噴射弁114の製造公差に起因するばらつき)燃料調量における誤差を補償することにあり、ひいては、定常状態動作の際に空燃比が一定であることを保証することにある。λ制御は、内燃機関温度tmotを越え暖機運転の際にスイッチオフされる。回転数n及び負荷tlは、λ制御の制御パラメータを動作点の関数として選択するために必要である。全負荷又はエンジンブレーキの動作時の燃料供給の遮断は、λ制御のスイッチオフを招く。制御係数frの計算法は、図9〜図11に詳細に示されている。
【0021】
負荷tlは、乗算点で制御係数frと乗算される。その結果、負荷検出動作又は噴射動作において定常状態誤差が存在する場合にはそれが補正される。
【0022】
ブロック203では壁面燃料膜の形成が、負荷tl及び内燃機関温度tmotから推定される。この実施例では補正信号teukl及びteukkが計算される。この場合、信号teukkは、負荷の変化中及びその直後に直接に作用し、信号teuklは、負荷変化後の大幅に長い時間間隔にわたり噴射時間を制御する。しかし、ただ1つの補正変数又は複数の補正変数を有し、それぞれの変数が、負荷変化の間又はその後にある所定の時間領域内でアクティブであるとうい変形も可能である。壁面燃料膜補償の詳細な説明は、図5及び図6に記載のフローチャートに示されている。
【0023】
ブロック206の適応動作では、制御係数fr及びλセンサ電圧us又は負荷信号tlの経過に基づいて、新状態に比して壁面燃料膜特性の変化が存在するかどうか、適切な補正信号fukaが求められているかどうかが調べられる。補正係数fukaは、内燃機関温度にも依存することもある、何故ならば、異なる種類の燃料を使用すると、沸点曲線の経過が異なるので、冷たい内燃機関の場合には、温かい内燃機関の場合に比して壁面燃料膜補償の補正が大幅に異なることがあるからである。図14〜図24では適応動作のための複数の変形が、詳細に示されている。
【0024】
壁面燃料膜補償の出力変数teukk及びteuklは、論理結合点205で加算され、点207で、ブロック206での適応動作から計算された補正係数fukaにより重み付けされる。その結果のte補正信号teukgは、加算点208で定常状態噴射時間に加算される。噴射弁114の出力段階は、ブロック209で、このようにして求められた全体の噴射時間teにより制御される。
【0025】
加算補正(加算点208)に代りに噴射の乗算補正が、非定常状態動作の際に行われる方法も知られている。壁面燃料膜補償のための前述の適応方法は、この場合にも適用できる。
【0026】
図3は、図2に関連して説明した噴射時間の計算の1つの変形を示す。ブロック又は論理結合点200,201,202,203,204,205,208及び209は、それらの機能の面で、図2と同一の参照番号により示されているブロックに相応する。しかし、図2の場合と異なり、ブロック206でも適応動作は、複数の補正係数を求め、それぞれの補正係数は、壁面燃料膜補償装置203の出力変数に相応する。この場合、壁面燃料膜補償の短時間にわたり作用する出力信号teukkのための係数fukakと、長時間にわたり作用する出力信号teuklのための係数fukalとが形成される。これらの係数teukk及びfukalは、それぞれの出力変数と乗算され(論理結合点210及び211)、壁面燃料膜補償の個々の出力変数は、論理結合点205で結合され、これにより非定常状態動作のための全体の補正信号が形成される。
【0027】
図4には、”全負荷”動作状態及び”エンジンブレーキの動作時の燃料供給遮断”動作状態を求める簡単な方法が示されている。図示のプログラムは、固定タイムフレーム(通常は10ms)のの中で繰返し実行される。初めに回転数n及び絞り弁の値wdkが、相応するするセンサ信号111及び118から求められる(ステップ301及び302)。
【0028】
ステップ303で、絞り弁の開度と閾値WDKVLとの比較により、絞り弁が全開されているかどうかが調べられる。イエスである場合、全負荷作動を識別するフラグB_vlが、ステップ304でセットされる。絞り弁が部分的にしか開放されていない場合、全負荷フラグB_vlは、ステップ305で消去される。
【0029】
ステップ306では、絞り弁が閉成されているかどうか、すなわち、絞り弁の開度が、絞り弁のアイドリング位置WDKLLより小さいか又は等しいかどうかが調べられる。絞り弁が閉成されている場合、ステップ307で、内燃機関が高い回転数で作動されているかどうかが調べられる(エンジンブレーキ動作時の燃料供給の遮断のための通常の閾値はNSA=1500rpm)。回転数がこの閾値より大きい場合、すなわちイエスの場合、エンジンブレーキ動作時の燃料供給の遮断のための条件B_saが、ステップ309でセットされる。絞り弁がアイドリング位置にない場合、すなわちステップ306でノーと判断された場合、又は回転数がエンジンブレーキ動作時の燃料供給遮断回転数より小さい場合、すなわちステップ307でノーと判断された場合、エンジンブレーキ動作時の燃料供給の遮断は、実行されない(B_saはブロック308でリセットされる)。
【0030】
図5及び図6のフローチャートは、壁面燃料膜補償の1つの方法を示す。図5のプログラムは、通常はセグメント同期している、すなわち各点火毎に1度実行される。
【0031】
図5のステップ401で、初めに、それぞれの内燃機関状態に相応し、定常状態動作の際に得られた壁面燃料膜量が求められる。この壁面燃料膜量は、例えば負荷に依存する係数と、温度に依存する係数との積として近似的に計算できる。tl及びtmotの関数としての係数は、ROMの中に値テーブルとして記憶されている。
【0032】
ステップ402で、壁面燃料膜の定常状態量の変化は、2つの順次の計算ステップで求められる。壁面燃料膜量のこの変化分dwfは、壁面燃料膜の形成を補償するために、付加的な燃料量として後続の噴射に分配しなければならない。このためにステップ403で分割係数auklが、初めに回転数n及び負荷tlの関数として求められる。0%〜100%の値をとることができるこの分割係数を用いて、ステップ402で計算された壁面燃料膜量は、短時間信号dwfkと長時間信号dwflとに分割される(ステップ404)。短時間信号dwfkは、負荷の変化の後に非常に短い時間間隔にわたり分配される(通常は4〜5回の噴射)。これとは異なり、長時間信号dwflは、大幅に長い時間領域にわたり噴射される。その結果、分割係数auklを相応して選択することにより、付加的に噴射する燃料量dwfのある時間配分は、壁面燃料膜の動的特性に適応させることが可能である。
【0033】
ステップ405及び406で、それぞれ短時間信号又は長時間信号に相当する噴射時間teukk及びteuklが、求められる。計算手続きは、図6に短時間信号に関して詳細に説明されている。ステップ406での長時間信号に関する計算は、これに相応して行われるが、しかしパラメータの選択が、ステップ405での場合と異なる。
【0034】
最後にステップ407で、ステップ401で求められた定常状態壁面燃料膜量が、変数wfaltの中に記憶される、何故ならばこの定常状態壁面燃料膜量は、壁面燃料膜量の変化の計算のためのプログラムの次の部分のために再び必要であるからである。
【0035】
図6は、図5のステップ405からの短時間信号の計算を詳細に示す。
【0036】
初めにステップ420で、短時間信号により補償される壁面燃料膜量の変化分dwfkが、短時間信号メモリの内容に加算される。このメモリは、同様に短時間信号としてなお付加的に噴射しなければならない燃料量を記憶している。(短時間信号は、複数の噴射動作にわたり配分されなければならないので、短時間信号メモリは、負荷の直接に先行する変化に由来し、まだ噴射されていない壁面燃料膜変化の残留部分をまだ記憶している)。
【0037】
後続のステップ421で、次の噴射量に加算される短時間信号メモリの部分teukkが求められる。これは、低減係数zukkとの乗算により行われる。この係数はROMに記憶されており、それぞれの内燃機関に適応されている。通常の値はzukk=0.25である、すなわち、各計算ステップで短時間信号メモリの25%が、te補正として噴射される。
【0038】
次いで、短時間信号メモリは、取出され噴射された部分だけ低減されなければならない。これは、ステップ422で行われる。最後にステップ423で、短時間信号メモリの新値が、変数sdwkaltの中に記憶される。このメモリ内容は、その後の噴射の際に考慮しなければならない残留燃料量を形成している。
【0039】
長時間信号teuklの計算(図5のステップ406)は、相応して行われる。しかし、低減係数zukkの代りに、大幅により小さい減少係数zuklが使用される(この場合の通常の値は、約0.015)。従って各計算ステップで、長時間信号メモリの1.5%が噴射される。このようにして、長時間信号メモリは、大幅により長い時間間隔にわたり作用する。
【0040】
図7は、負荷の変化を例にして、図5及び図6の方法を基礎にして得られるte経過を示す。この場合、λ制御係数fr(図2及び図3のブロック202を参照)と、適応形非定常状態制御の補正係数(図2及び図3のブロック206)とが、1に等しいことが必要である。
【0041】
まず初めに、上部の線図は、負荷信号の経過(加速及び後続の減速)を示す。加速プロセスの間、壁面燃料膜量は増加する。壁面燃料膜のこの形成は、噴射時間の付加的な増加により補正されなければならない。後続の減速の間、壁面燃料膜量は、再び減少する。このプロセスの際に放出された燃料量は、混合気を濃厚化し、従って、減速の際に噴射時間は、より小さい負荷に相応する値を越えて低減されなければならない。
【0042】
図7の中央の線図は、図5及び図6のアルゴリズムから得られる、短時間信号teukk(実線)と長時間信号teukl(破線)との経過を示す。
【0043】
最後に、下部の線図は、噴射時間の経過を示す。破線は、図2及び図3の変数telに相応する、すなわち、実際の供給空気に相応する噴射時間に相当する。壁面燃料膜補償の結果、噴射時間は、加速の際には短時間信号と長時間信号との加算により付加的に増加し、減速の際には付加的に減少する。その結果、信号te(実線)が発生し、この信号teは、負荷の変化の後に定常状態フェーズになると初めて再び無補正信号と一致する。
【0044】
図8は、混合気制御に使用されるような酸素センサの典型的な特性曲線を示す。この特性曲線は、顕著な2位置動作特性を示す。希薄混合気(λ>1.03)及び濃厚混合気(λ<0.97)においては、λセンサ電圧usは、混合気によりほとんど変化しない。従って、測定λセンサ電圧の僅かな乱れであっても、空燃比を求める際に大きな誤差の原因となる。その上、濃厚混合気領域では特性曲線は温度に強く依存する。λセンサ温度は、λセンサの内部抵抗を求めることにより求めることができるが、しかしこのために制御装置に付加的な回路コストがかかる。従って、図9〜図12に関連して後に説明するλ制御法では、λセンサ電圧が、理論混合気に相当する450mVの値より大きいか小さいかのみが調べられる。その結果、平均値がλ=1の周期的制御振動が発生する。
【0045】
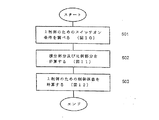
図9は、λ制御を概念的に示すフローチャートを示す。λ制御の役割は、定常状態動作の際に平均してλ=1となるように空燃比を調整することにある。このために次のステップを必要とする。
【0046】
− λ制御のスイッチオン条件を調べる(ステップ501)。
【0047】
− 制御の積分及び比例成分を計算する(ステップ502)。
【0048】
− λ制御の制御係数frを計算する(ステップ503)。
【0049】
これらのステップは、後続の図面を用いて詳細に説明する。
【0050】
図10は、λ制御が動作するために満足しなければならない条件を示す。図示のプログラムは通常は、10msのタイムフレームの中で実行される。初めに、ステップ510で内燃機関温度tmot及びλセンサ電圧usが、相応するセンサ119及び116から読出される。
【0051】
暖機運転の間、内燃機関の濃厚化がしばしば希望される。理論混合気に調整するλ制御は、この時間の間はアクティブになってはならない。従ってステップ511で、内燃機関温度が、所定の閾値TMLRを越えたかどうか調べられる。ノーである場合、ステップ515でλ制御が、相応するフラグB_lrが消去されることによりスイッチオフされる。
【0052】
同様に、全負荷作動では、排気ガスマニホルド及び触媒器を熱過負荷から保護するために濃厚混合気にしばしば切換えられる。この場合にも、λ制御は、アクティブになってはならない。ステップ512で、全負荷条件が存在するかどうかが調べられる(図4参照)。イエスの場合にも、ステップ515へ分岐し、このようにしてλ制御はスイッチオフされる。
【0053】
λ制御の補正係数frが、エンジンブレーキ動作時の燃料供給の遮断の際に上限に達するのを防止するために、ステップ513でも、エンジンブレーキ作動が行われている場合にはステップ515への分岐が行われる。
【0054】
最後に、ステップ514で、λセンサの妥当な信号が存在するかどうかが調べられる。最も簡単な場合、これは、下限値UMIN及び上限値UMAXとの比較により行う。λセンサ電圧がこの領域の外部にある場合、ステップ515でB_lrが0にセットされる。
【0055】
すべての条件が満足されている場合(内燃機関温度が閾値より大きい、全負荷無し、エンジンブレーキ動作時の燃料供給遮断無し、λセンサの信号が妥当である)、λ制御が、ステップ516でフラグB_lrが1にセットされることによりスイッチオンされる。
【0056】
λ制御器の、動作点に依存するパラメータが図11で求められる。初めに、回転数が、センサ118の信号から求められる(ステップ521)。次いで、ステップ522,523及び524で積分成分FRIと、正の比例急激ステップ変化のための比例成分FRPPと、負の比例急激ステップ変化のための比例成分FRPNとが、回転数n及び負荷tlの関数として求められる。これらの3つのパラメータの値は、ROMに記憶されているテーブルから求められる。
【0057】
図12には、制御係数frの計算が示されている。図示のプログラムは、例えば10msの固定タイムフレームの中で実行される。
【0058】
ステップ531で、λ制御が実際にイネーブルにされたかどうかが調べられる(図10のフローチャート参照)。ノーの場合、ステップ532で、制御係数frは、そのニュートラル値1.0にセットされる。次いで、ステップ545で、フラグB_lrの値が、RAMセルB_lraltに記憶される、何故ならばフラグB_lrの値は、次のプログラム実行で再び必要であるからである。
【0059】
ステップ531で、制御が実行可能であると判断された場合、すなわちイエスの場合、プログラムは、次のステップ533で、λセンサ電圧usが、理論混合気(λ=1)に相当する閾値450mVより小さいか又は大きいかが調べられる。判断の結果は、変数signlrの中に記憶される。us>450mV(すなわち濃厚混合気)である場合、すなわちステップ533でイエスと判断された場合、ステップ534で変数signlr=−1がセットされる。ステップ533でノーと判断された場合、signlr=1がセットされる(ステップ535、希薄混合気)。次いで、signlrの値が、前の計算ステップと比較して同一のままであるかどうかが調べられる(判断ステップ536)。値が変化している場合、すなわちノーの場合、付加的にステップ537でλ制御が、前の計算ステップで既にアクティブであったかどうか、すなわち、signlrの値が、前の計算ステップでも正しく求められていたかどうかが調べられる。イエスの場合、いわゆる”λセンサ急激ステップ変化”が発生する、すなわち、混合気が、希薄側から濃厚側へ又はその逆に変化する。このλセンサ急激ステップ変化は、ステップ538でフラグB_lrspがセットされることによりマーキングされる。このフラグB_lrspは、後述の壁面燃料膜補償の適応動作で必要となる。
【0060】
次のステップ541で、混合気が希薄である(signlr=1)であると判断さると、すなわち、イエスの場合、制御係数frに加算されなければならない変化dfrが、正の比例急激ステップ変化FRPPに等しくセットされる。逆に、混合気は過度に濃厚であると判断された場合、すなわち、ノーの場合、ステップ541でdfrが、負の比例急激ステップ変化FRPNの値にセットされる。
【0061】
一方、判断ステップ536でイエスと判断された場合、すなわち、λセンサ電圧が450mVを越えなかった場合、λセンサ急激ステップ変化のためのフラグB_lrspが消去される(ステップ539)。更に、制御係数の変化dfrは、積分成分FRIと変数signlrの値との積に等しくセットされる(ステップ540)。混合気が過剰に濃厚である場合(すなわちsignlr=−1)、制御係数の負のインクリメントdfrが発生し、ひいてはfrが減少する。逆に、希薄混合気(signlr=1)は、正のインクリメントを招き、ひいては濃厚化を招く。同一のことが、ステップ537でλ制御が前の計算ステップでまだアクティブでなかった(すなわちB_lraltがセットされていない)と判断された場合、すなわちノーの場合に行われる、何故ならばその場合には変数signlraltは、重要な値を含んでおらず、従ってλセンサが450mVを通過したことが検出されなかったからである。
【0062】
ステップ544で制御係数の変化が、制御係数frの値に加算され、signlrの値が、次の計算サイクルのために変数signlraltの中に保持される。次いで、λ制御が実行可能でない場合のようにステップ545でフラグB_lrの値が、次のプログラム実行のために記憶される。
【0063】
図13は、前述の制御により得られる制御係数とλセンサ電圧との経過を示す。時点Aで、希薄混合気から濃厚混合気へのλセンサ急激ステップ変化が、発生する。λ制御は、制御係数を低減することにより応答し、とりわけ、まず初めに負の比例急激ステップ変化FRPNを加算することによりこれに応答する。次いで制御係数は、積分成分の値に相応して緩慢に減少する。制御係数がニュートラル値1.0に到達しても、λセンサ急激ステップ変化は検出されない、何故ならば理想混合気は、システムの中の遅延時間(内燃機関の運転サイクル及びλセンサまでのガス走行時間)に起因してλセンサにまだ到達していないからである。従って係数frは、遅延時間の終了後に時点Bでλセンサ急激ステップ変化が再び検出されるまで更に減少する。この時点で混合気は、明らかに過剰に希薄であるので、まず初めに、制御係数をできるだけ早急にそのニュートラル値の近辺に調整する正の比例急激ステップ変化FRPPが、加算される。次いで(前の時間間隔A〜Bに相応して)制御係数が、濃厚混合気への移行が再び検出されるまで増加する。
【0064】
パラメータ(積分成分及び比例成分)を適切に選択することにより、約3%の制御振動振幅とすることが達成される。
【0065】
図14は、加速の際の制御係数の経過を示し、この例で適応形壁面燃料膜補償の動作モードを示す。この場合、壁面燃料膜の形成が新状態に比して増加したと仮定されている。従って負荷の増加により混合気は希薄になり、これをλ制御器は補償しようとする。
【0066】
時間間隔A〜Bではこの障害は、まだ制御係数に影響しない。制御係数は、通常6%の偏差を示す。負荷の変化に起因してより希薄である混合気を吸気及び燃焼及び排気した後、そしてλセンサまでのガス走行時間の経過後、制御器は、時間間隔B〜Cで乱される。混合気の希薄化を補償するために、制御器は6%のその通常の制御領域に相応するより大幅に混合気を濃厚化しなければならない。負荷変化が、前記の時間間隔B〜Cで検出されると、システムは、壁面燃料膜の形成に変化が発生したと判断し、壁面燃料膜補償のための補正係数が、相応して適応される。しかし、増幅された制御偏差と、負荷変化とを時間的に正しく割当てるためには、負荷信号を、噴射時間とλ測定との際の遅延時間だけ補正する必要がある(図14の上部の線図の破線)。
【0067】
λ障害は、負荷変化に後続する定常状態フェーズで壁面燃料膜の形成の増加に起因して再び減衰するので、制御係数は、時間領域C〜Dでその元の領域に戻る。この場合にも、制御偏差は、6%より大幅に大きい。しかしこの場合、壁面燃料膜補償の適応動作は行われない、何故ならば領域C〜Dではもはや負荷のいかなる変化も発生しないからである。
【0068】
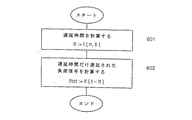
図15は、壁面燃料膜パラメータの適応のために必要である負荷信号の遅延時間補正のためのフローチャートを示す(図14に関する説明を参照)。プログラムは、すべて10ms毎に実行される。
【0069】
噴射からλ測定までの遅延時間は、次の2つの部分から成る。
【0070】
− 内燃機関の運転サイクル(吸気、圧縮、燃焼、排気)に起因する遅延時間。この遅延時間は、内燃機関回転数にのみ依存する。
【0071】
− 出力弁からλセンサまでの排気ガスの走行時間に起因する遅延時間。この遅延時間は、空気量及びひいては負荷に依存する。
【0072】
これに相応してステップ601で、遅延時間ttが、回転数及び負荷の関数として求められる。このアプローチにより遅延時間の前述の2つの部分を表される
。遅延時間の値は、異なる回転数及び負荷に対してROMのテーブルに記憶される。
【0073】
次のステップ602で負荷信号tlは、このようにして計算された遅延時間で遅延される。
【0074】
図16は、2つのλセンサ急激ステップ変化の際の負荷の変化dtlと、混合気偏差dlamのための推測値とが求められる。このプログラムもすべて10msで実行される。
【0075】
この方法による壁面燃料膜パラメータの適応のための前提条件は、λ制御が正しく動作してていることである。従ってまず初めにステップ610で、λ制御が動作しているかどうか(B_lr=1、図10参照)が調べられる。ノーである場合、ステップ611でカウンタanzspがクリアされる。ステップ621でフラグB_ukaがリセットされる。このようにして図17に示されている適応プログラムに、負荷の変化dtl又は混合気偏差dlamを計算することが不可能であることが伝達される。次いでプログラムが終了する。
【0076】
λ制御が正しく動作している場合、すなわち、ステップ610でイエスと判断された場合、λセンサ急激ステップ変化が発生したかどうか(すなわち、λセンサ電圧が450mVを通過したかどうか)が調べられる(ステップ612)。負荷及び制御係数は、λセンサ急激ステップ変化でしか評価されないので、後続の処理は、フラグB_lrspが消去されている場合には不要である。この場合、ステップ622でフラグB_ukaのみがリセットされる。
【0077】
λセンサ急激ステップ変化が検出された場合、すなわちステップ612でイエスと判断された場合、λ制御がスイッチオンされてから所定回数だけλセンサ急激ステップ変化が発生したかどうか(通常は4回のλセンサ急激ステップ変化)を調べる必要がある。この待ち時間は、例えばエンジンブレーキ動作時の燃料供給の遮断の後にλ制御の回復を待つために必要である。従ってステップ613で、十分なλセンサ急激ステップ変化がまだ検出されない場合、すなわちノーの場合、ステップ614へ分岐する。ステップ614では、λセンサ急激ステップ変化のためのカウンタanzspが、1だけ増加する。更に、ステップ623でフラグB_ukaが消去される、何故ならばこの場合にも負荷変化のためと、正常値からの制御偏差のずれのため有効な値とが求められなかったからである。制御係数は変数fraltの中に緩衝記憶される、何故ならば制御係数は、次のλセンサ急激ステップ変化で制御偏差の計算のために使用されるからである。しかしこの場合、1つの計算ステップだけ遅れている制御係数fr(t−dt)の値が記憶される、何故ならば瞬時値fr(t)は既に、λセンサ急激ステップ変化の時に加算された比例急激ステップ変化を含んでいるからである。(時間dtは、10msの計算ステップ間隔に相当する)。
【0078】
十分に多数のλセンサ急激ステップ変化が、λ制御のスイッチオン以来既に発生した場合、すなわち、ステップ613でイエスと判断された場合、フラグB_ukaがセットされ(ステップ620)、これは、負荷変化及び制御偏差の有効な計算が、実行可能であったことを示す。次のステップ615で、最後のλセンサ急激ステップ変化以来の遅延時間の補正された負荷信号tltotの変化が計算される。瞬時の負荷値は、次のλセンサ急激ステップ変化で再び負荷変化を求めることができるように変数tlaltの中に記憶される。
【0079】
ステップ616では制御偏差dfrが求められる。しかしこの場合、制御係数の制御係数fr(t)の瞬時値を基礎として使用してはならない、何故ならば 相応する比例急激ステップ変化はこの場合にも既に、この値の中に含まれているからである(図12参照)。その代りに、1つの計算ステップだけ遅れている値fr(t−dt)を使用する。制御係数frneuも、次のλセンサ急激ステップ変化まで変数fraltの中に記憶されている。
【0080】
ステップ617〜619では、正常値(障害無しの状態)からの制御偏差のずれが計算される。このずれは、λ制御が行われない場合に発生する空燃比の尺度であり、従って障害の大きさの尺度である。まず初めにステップ617で、正の制御偏差であるか、負の制御偏差であるかが調べられる。正の制御偏差である場合、すなわち、イエスの場合、ステップ618で正常値からのずれdlamが、
dlam:=dfr−6%
であることが得られる。ただしこの場合、制御偏差が操作の際に6%であるとの前提条件が満足されていなければならない。従って、制御係数が、濃厚方向に期待値の6%の代りに例えば8%移行する場合、2%のずれとなる。従って、λ制御を行わずにλ=1.02への希薄化がセットされたと仮定できる。これに相応し、正常値からの制御偏差のずれdlamは直接に、λ=1.0からの混合気の偏差のための近似値として使用できる。これに相応して、ステップ619での負の制御偏差において、ずれdlamが次のようになる。
【0081】
dlam:=dfr+6%
図17は、いかにして壁面燃料膜補償のための補正係数fukaが、λセンサ電圧が450mVを通過した2つの時点の間の図16で計算された負荷の変化dtlと、混合気偏差とから求められるから示されている(係数fukaのさらなる処理に関して図2のブロック206及び207参照)。図17のプログラムは、図16のプログラムと同一のタイムフレームの中で呼出される(10ms毎)。まず初めにステップ630で内燃機関が既に走行しているか又はまだ始動中であるかが調べられる。内燃機関が始動中である場合、すなわちイエスの場合、判断ステップ631で制御装置の連続的な電圧給電が、障害を有するかどうかが調べられる。連続給電の障害が検出されない場合、すなわち、631でイエスと判断された場合、ステップ632で、前の走行の際に検出された値fukaが、バッテリーバックアップされているRAMから読出される。逆に、連続給電が障害を有する場合、すなわち、ステップ631でノーを判断された場合、ステップ633で係数fukaは、そのニュートラル値にリセットされる。
【0082】
内燃機関が走行している場合、すなわち、630でノーを判断された場合、ステップ634で、フラグB_ukaがセットされているかどうか、すなわち、図16の先行のプログラムが、負荷変化dtlに対する有効値と混合気偏差dlamに対する有効値とを求めたかどうかが調べられる。ノーの場合、プログラムは終了する。
【0083】
負荷変化に対する有効値と、制御偏差のずれのための有効値とが、存在する場合、すなわち634でイエスと判断された場合、ステップ636で推定混合気偏差dlamが、2%より大きいかどうかが調べられる。ノーである場合、明らかにさしたる混合気障害は存在せず、プログラムは終了する。ステップ636で、推定混合気偏差dlamが20より大きいと判断された場合、すなわち、イエスの場合、ステップ637で同時に負荷変化が検出されたかどうかが調べられる。最後のλセンサ急激ステップ変化以来の負荷変化が、所定の閾値より小さい場合、すなわち、ステップ637でノーと判断された場合、混合気偏差は、別の障害に起因し、壁面燃料膜の特性の変化に起因しない。この場合、プログラムは終了する。
【0084】
負荷変化と混合気偏差との双方が検出された場合、まず初めにステップ638で、補正係数fukaが調整されるべき方向が、求められる。負荷変化dtlと混合気偏差dlamとが正の場合(すなわち、負荷の増加につれての希薄化)、ブロック206(図2)で壁面燃料膜補償により計算された噴射時間の補正は、明らかに低すぎ、補正係数fukaを増加しなければならない。減速の場合(負のdtl)、過度に低い壁面燃料膜補償は、濃厚化を招き、ひいては、dlamの値を負にする、何故ならば噴射時間は、壁面燃料膜からの燃料蒸発を補償するのに十分な程度に減少されていないからである。逆に、加速の場合、過度の壁面燃料膜補償は、濃厚化を招き(すなわちdtlは正であり、dlamは負である)、減速は、希薄化(dtlは負であり、dlamは正である)を招く。従って明らかに、壁面燃料膜補償は、dtl及びdlamが同一の正負の符号を有する場合には高めなければならず、dtl及びdlamが異なる正負の符号を有する場合には低下しなければならない。これは、ステップ638で変化の正負の符号signfukaを、積(dtl・dlam)の正負の符号と等しくセットすることにより達成される。
【0085】
ステップ639では、ステップ638で求められた変化の方向に応じて、係数fukaを増加するかどうか(ステップ640)、又は減少が必要であるかどうか(ステップ641)が調べられる。新しく計算された係数fukaは、バッテリーバッファされているRAMに記憶され、従って内燃機関が停止され、次いで再び始動された時点で既に、係数fukのための補正値が使用可能である。
【0086】
代替的方法
図14には、非常に短く急峻な負荷変化が、例として示されている。負荷信号の遅延時間補正なしには、図14の時間部分B〜Cすなわち障害frの経過の領域の中での負荷変化はもはや検出できない。しかし、実際の運転試験では平坦な負荷勾配が生じ、負荷変化が時間部分B〜Cの中でさえも、発生する。その結果、図15のような遅延補正は、不要である。従って、壁面燃料膜補償の補正方法は、大幅に簡単になる。
【0087】
図15〜図17に示されている方法の1つの変形では、制御偏差dfrから計算された混合気偏差dlam(図16、ステップ616〜619参照)の代りに、制御係数frの2つの順次の半周期の間の期間を、空燃比の障害を検出するために使用する。障害無しの作動の間は立上り半周期の期間ts対立下り半周期の期間tfの比は、一定値を有する。図14の希薄化により、立上り半周期(B〜C)の期間tsは、大幅に長くなるが、先行の立下り半周期(A〜B)は影響されない。従って、図17のステップ636で、混合気偏差dlamの代りに障害無しの作動の際の比Voからの持続時間の比V:=ts/tfのずれを調べることも可能である。この場合、図17のステップ638ではsigndfuka:=sign(dtl*(V−Vo))を計算しなければならない。
【0088】
図15〜図17の方法の欠点は、制御係数がその正常レベルまで戻る時間間隔C〜Dの中でさえも負荷勾配がまだ検出可能である程度に平坦に負荷の増加が進行すると仮定すると図14で明瞭になる。図16の制御偏差及び混合気偏差の計算の際には時点Cから時点Dまでの制御係数の変化のみが考慮され、前歴は考慮されないので、時点Dでのλセンサ急激ステップ変化で約−9%の制御偏差が生じ、ひいては、dlam=−3%の混合気偏差が生ずる。領域C〜Dの中での負荷の上昇を検出することができるとすると、これにより誤って係数fukaが低減されることになろう。
【0089】
これは、図18の変形により防止される。図18のプログラムは、図16の混合気偏差dlam及び負荷変化dtlを置換する。図16の手続きとの相違点は、初めに、λ制御がスイッチオフされている際に設定される混合気のための絶対値lamが推定される事実にある。この推定値から1を減算すると混合気の偏差dlamが、得られる。ステップ710〜716及び620〜624は、図16のそれぞれの処理ステップ610〜616及び620〜624に相当する。ステップ717で、ステップ716で計算された制御偏差が正か負かが調べられる。制御偏差が正である場合、すなわちイエスの場合、先行のλセンサ急激ステップ変化に関する混合気の変化分が、約6%の制御偏差の正常値からの偏差から次式により計算される。
【0090】
dlaml:=dfr−6%(ステップ718)。
【0091】
制御偏差が例えば8%である場合、混合気は明らかに、障害無しの状態のおけるより更に2%だけ濃厚化されなければならない。従って、2%の希薄化との結論が出される。制御偏差が負の場合、すなわちステップ717でノーと判断された場合、混合気の変化分dlamlは次式から得られる。
【0092】
dlaml:=dfr+6%(ステップ719)。
【0093】
次いでステップ726で、混合気の絶対値が、前のλセンサ急激ステップ変化以来の混合気の変化分dlamlが、混合気の旧推定値に加算されることにより推定される。このようにして計算された混合気の絶対値lamから1.0を減算すると、混合気の偏差dlamを求めることができる。
【0094】
λ制御が作動されていない場合(判断ステップ710でノーの場合)、ステップ725で混合気の推定値が、そのニュートラル値1.0にセットされる。
【0095】
図19は、図14と同一の負荷経過及び制御係数frの経過を示す。図19の制御係数frの経過の場合、まず初めに、9%の正の制御偏差が、時点Cで検出される。それ故、時間間隔B〜Cで混合気の3%の変化が発生する。推定λ値lamが、先行の障害無しの定常状態動作の間は1.0であったので、時点Cでlam=1.03の推定値が計算される。時間期間C〜Dの中でλ制御器が作動に戻る場合に−9%の制御偏差が、時点Dでのλセンサ急激ステップ変化で計算され、これから−3%の混合気変化dlamlが、計算される。このようにして絶対値lamが、再び値1.0にリセットされる。しかし、いかなる時点でも、混合気が濃厚であるとの結論は出されない。このようにして誤った方向への係数fukaの補正は、防止される。
【0096】
λ制御が障害に応答できる前に既に減衰する短時間の障害は、前述の方法により検出されない。この理由から図20〜図25に、λセンサ電圧usの評価を基礎とする1つの変形につれて説明する。λセンサの特性曲線の線形化により空燃比を測定することは、図8に関連して説明したように非常に困難である。しかし、空燃比の非常に強い障害は、λセンサ電圧自身から読取ることができる。このために、まず初めに、障害の無い作動の際に発生するセンサ電圧の最小値及び最大値を求める必要がある。λセンサ電圧が、これら2つの限界値を大幅に下回るか又は上回る場合、混合気に障害が存在する。
【0097】
図20は、初めは障害の無い定常状態動作でのλ制御電圧及び制御係数frを示す。この場合、λセンサ電圧は、極値USF(濃厚混合気の場合の最大値)と極値USM(希薄混合気の場合の最小値)との間で振動する。時点Aで、混合気の大幅な濃厚障害が発生する。これによりλセンサ電圧が、短時間にわたり値USFを越えて増加するが、しかしこれにより制御係数frの経過は変化しない。
【0098】
図21はまず初めに、2つのλセンサ急激ステップ変化の間の負荷変化を求め、λセンサ電圧からの比較的大きいλ偏差を検出するフローチャートを示す。このプログラムは、例えば10ms毎に呼出され、図16の方法を置換する。
【0099】
障害が無い作動の際に振幅を求める際に、λセンサ信号の電気障害と、個々の燃焼により発生される混合気変動とに無関係にするために、ろ波されたλセンサ電圧usfが、ステップ800で計算される。通常の1次のディジタル低域フィルタが、このために使用される。ステップ801で、λ制御が作動しているかどうかが調べられる、何故ならばλセンサ電圧の周期的変動は、λ制御が動作している際のみ発生するからである。
【0100】
λ制御が作動していない場合、すなわち、ステップ801でノーと判断された場合、ステップ802で、λセンサ急激ステップ変化anzspのためのカウンタと、λセンサ電圧の通常の最小値を大幅に下回る(anzm)測定値と、λセンサ電圧の通常の最大値を上回る(anzf)測定値とのためのカウンタとがリセットされる。その上、障害が無い作動の際のλセンサ電圧の最大値のための推定値USFと、障害が無い作動の際のλセンサ電圧の最小値のための推定値USMとは、妥当な初期値にセットされる(通常はUSF=1V及びUSM=0V)。次いでプログラムは終了する。
【0101】
λ制御が作動している場合(判断ステップ801でイエスと判断された場合)、判断ステップ803で、λセンサ急激ステップ変化すなわち450mVを通過したλセンサ電圧が検出されたかどうかが調べられる。ノーの場合、次いでステップ804でλ制御がスイッチオンされて以来4回より少ない回数のλセンサ急激ステップ変化が検出されたと判断されると、すなわちステップ804でノーと判断されると、プログラムは終了する。少なくとも4回のλセンサ急激ステップ変化が発生した場合、すなわち、ステップ804でイエスと判断された場合、λ制御が、その正常な制御振幅に設定されるのに十分な時間を有したと仮定できる。従ってステップ805で、2つのλセンサ急激ステップ変化の間のフェーズで、低域フィルタによりろ波されたλセンサ電圧usfの極値usfmin及びusfmaxが求められる。このための方法が、図24に詳細に示されている。ろ波されたλセンサ電圧のこれらの極値は、障害が無い作動の際にλセンサ電圧の最小値及び最大値を補正するために必要とされる(ステップ812を参照)。
【0102】
ステップ806では混合気障害が、λセンサ電圧を通常の最小値及び最大値USM及びUSFと比較することにより検出される。このための方法が、図23に示されている。
【0103】
λ制御が動作しており(すなわち、ステップ801でイエスと判断され)、次いで、λセンサ電圧が450mVを通過した場合(すなわち、ステップ803でイエスと判断された場合)、次いでステップ807で、十分な回数のλセンサ急激ステップ変化が、λ制御がスイッチオンされて以来既に検出されたかどうかが調べられる。ステップ807でノーと判断された場合、次いでステップ808で、λセンサ急激ステップ変化のためのカウンタanzspの計数状態が増加し、プログラムが終了する。
【0104】
4より多い回数のλセンサ急激ステップ変化が検出された場合(ステップ807でイエスと判断された場合)、ステップ809でフラグB_ukaがセットされ、これにより後続ステップに、負荷変化及び混合気偏差のための有効な値が存在することが示される。後続のステップ810で(図16と同様に)、前のλセンサ急激ステップ変化以来の負荷変化が計算される。遅延時間だけ遅延された負荷tltotが使用される。負荷信号の瞬時値は、次のλセンサ急激ステップ変化まで変数tlaltの中に記憶される。
【0105】
次いでステップ811で、ステップ806でλセンサ急激ステップ変化とλセンサ急激ステップ変化との間のフェーズで検出された混合気偏差が評価される。このための方法が、図24のフローチャートに示されている。
【0106】
ステップ812で、ろ波されたλセンサ電圧の極値usfmax及びusfminが、障害が無い動作の際のλセンサ電圧の最大値及び最小値(USF及びUSM)として採用される。この補正は必要である、何故ならばこれらの値は、λセンサ温度が変化した結果として、又はλセンサの有効寿命の経過につれて特性曲線がずれた結果として、変化することがあるからである。
【0107】
最後に、ステップ813で、極値USF及びUSMを上回るか又は下回るλセンサ電圧の測定値のためのカウンタanzf及びanzmがリセットされ、次いでプログラムが終了する。
【0108】
図22は、ろ波されたλセンサ電圧の最小値及び最大値を求めるプロセスを示す。このプログラムは、10ms毎に呼出され、とりわけ、2つのλセンサ急激ステップ変化の間のフェーズで呼出される(図21のステップ805)。まず初めにステップ820で、λセンサ電圧が450mVより高いか又は低いかが調べられる。混合気が、制御振動の濃厚フェーズにある場合(us>450mV)、すなわち、ステップ820でイエスと判断された場合、次いでステップ821で、ろ波されたλセンサ電圧の最小値が、小さい値(例えば0.1mV)だけ増加される。その結果、最小値は、特性曲線がシフトした結果として既知の先行最小値usfminにもはや到達しなくなった場合には上方へ補正される。次いで、ステップ823で、ろ波されたλセンサ電圧usfが、既知の先行最大値usfmaxより高いかどうかが調べられる。イエスの場合、ステップ825で新値usfが、最大値usfmaxとして採用される。
【0109】
λセンサ電圧usが、450mVより低い場合(すなわち820でノーと判断された場合)、ステップ822で、ろ波されたλセンサ電圧の最大値usfmaxが、小さい値だけ減少される。
【0110】
その結果、最大値は、例えば特性曲線がシフトした結果として又はλセンサ温度が変化した結果としてもはや先行最大値に到達しない場合には下方へ補正される。判断ステップ824では、ろ波されたλセンサ電圧が既知の先行最小値usminより低いかどうかが調べられる。イエスの場合、ステップ826で、ろ波されたλセンサ電圧の値が、新最小値として記憶される。
【0111】
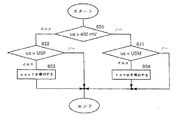
図23のフローチャートでは、障害が無い動作の際にλセンサ電圧と極値USM及びUSFとの比較により、混合気障害が存在するかどうかが調べられる。プログラムは、450mVを通過したλセンサ電圧の2つの時点の間のフェーズで10ms毎に実行される(図21、ステップ806参照)。まず初めに判断ステップ830で、”濃厚フェーズ”(us>450mV)であるか又は”希薄フェーズ”(us<450mV)であるかが調べられる。us>450mVである場合、すなわちイエスである場合、ステップ832で、閾値USFを越えたかどうかを調べるためにλセンサ電圧が監視される。λセンサ電圧がこの閾値すなわち障害が無い動作の際に発生する最大値より上に位置する場合、カウンタanzfの計数状態は増加する。逆に、us<450mVの場合(ステップ830でノーと判断された場合)、ステップ831でλセンサ電圧が、下限閾値USMと比較される。λセンサ電圧がこの値より下に位置する場合、すなわちステップ831でイエスと判断された場合、ステップ834でカウンタanzmの計数状態が増加する。障害が無い動作において閾値を越える測定値の数anzm又はanzfを基礎にして、次のプログラム部分で、濃厚化か又は希薄化かの結論が出される。
【0112】
図24は、濃厚化か又は希薄化かを求めるプログラムを示す。このプログラムは、λセンサ電圧が検出され、λ制御がスイッチオンされて以来十分に多い回数だけλセンサ急激ステップ変化が発生した場合(図21、ステップ811参照)には常に実行される。判断ステップ840で、前のλセンサ急激ステップ変化以来の閾値USFより上に位置する測定値の数anzfが、(例えば10等の)所定値より大きいと判断された場合、すなわちイエスの場合、大幅な濃厚が明らかに存在する。従ってステップ842で、濃厚を示すフラグB_fがセットされ、希薄化に相当するフラグB_mが消去される。逆に、濃厚でないと検出された場合(ステップ840でノーと判断された場合)、ステップ841で、その代りにより多数のλセンサ電圧の測定値が閾値USMより下に位置する(anzmが所定値より大きい)かどうかが調べられる。イエスの場合、ステップ843でフラグB_fがリセットされ、希薄化を示すフラグB_mがセットされる。比較的多数の”濃厚”測定値も、比較的多数の”希薄”測定値も存在しない場合(判断ステップ841でノーと判断された場合)、ステップ844で両方のフラグB_f及びB_mが消去される、何故ならばこの場合には比較的大きい障害が混合気中に発生していないことが明かであるからである。
【0113】
図25で、混合気障害を示す検出されたフラグB_f及びB_mと、前のλセンサ急激ステップ変化以来の負荷の計算された変化分dtlとから、補正係数fukaの変化が必要であるとの結論が出される。図25のフローチャートは、図17のフローチャートのステップ636〜641を置換する。濃厚障害のための条件がステップ850で検出された場合(B_f=1)、すなわちイエスの場合、次いでステップ852で負荷変化分が調べられる。負荷変化分dtlが、所定値より大きい場合、すなわちステップ852でイエスと判断された場合、ステップ856で係数fukaが減少される、何故ならば加速の場合に濃厚が検出され、これに応じて壁面燃料膜補償が明らかに過剰であるからである。逆に、減速が検出された場合(判断ステップ852でノーと判断され、後続の判断ステップ853でイエスと判断された場合)、ステップ857で係数fukaは増加される。
【0114】
濃厚が検出されない場合(判断ステップ850でノーと判断された場合)、後続の判断ステップ851で、希薄が検出されたかどうかが調べられる。ステップ851でイエスと判断された場合、次いで判断ステップ854で負荷変化が正であるかどうかが調べられ、ステップ854でもイエスと判断された場合、次いでステップ858で係数fukaが増加される、何故ならば加速かつ希薄の場合には壁面燃料膜補償が不足しているからである。判断ステップ854で加速が存在しないと判断された場合、すなわち、ノーと判断された場合、次いで判断ステップ855でその代わりに減速が存在するかどうか調べられる。イエスの場合、ステップ859で係数fukaが減少される。
【0115】
係数fukaが、ステップ856,857,858及び859のうちの1つのステップで変化された場合、ステップ860でfukaの新値が、バッテリーバッファされているRAMに記憶される。
【0116】
別の1つの改善が、図2の構成の代りに図3の方法を使用すると達成される。図3では2つの補正係数fukak及びfukalが、使用可能であり、補正係数fukak及びfukalは、壁面燃料膜補償の短時間信号と長時間信号とに別個に作用する(図3の乗算点210及び211)。この場合、図15〜図17の方法により、すなわち、λ制御係数frを評価することにより、壁面燃料膜補償の長時間信号teuklを制御する補正係数fukalを求めると好適である、何故ならば壁面燃料膜補償の長時間信号での誤差も、いずれにせよλ制御器の制御偏差に影響する長期的な混合気障害を招くからである。逆に、短時間信号のための補正係数fukakは、λセンサ電圧を評価することにより、すなわち、図21〜図25の方法により求めることができる。すなわち、誤差のある短時間信号は、混合気を短時間にわたってしか変化せず、従って検出は、制御偏差を評価することによっては常には保証されない。
【0117】
異なる種類の燃料はしばしば、内燃機関の異なる温度領域内で異なるやり方で壁面燃料膜特性に影響する。例えば約20%のエタノールが添加された燃料により内燃機関を作動する場合、約0.9〜1.0の係数fukが、温かい内燃機関において、市販の冬用燃料に適合されている壁面燃料膜補償を新燃料に適応させるためにセットされなければならない。逆に、20℃の温度の内燃機関においては係数fuka=1.4が必要である。この場合、異なる内燃機関温度領域のそれぞれの温度領域に対して別個の値を求め、次いでこの値を、内燃機関が当該の内燃機関温度領域の中で暖機運転する場合に使用すると好適である。
【0118】
別の1つの改善は、λ制御の周期長の増加を招き、ひいては制御偏差の増加を招くλセンサの老化を考慮する。この場合、制御偏差を、図16のステップ618及び619で(障害が無い場合のための)例えば6%の固定値と比較せず、制御偏差を、障害が無い場合の連続的に新たに求められる制御偏差dfr0と比較すると有利である。このために例えば図16のフローチャートを補足することにより、ステップ616で計算された制御偏差dfrを、ステップ615で重大な負荷変化分dtlが検出されない場合には常に正常な制御偏差dfr0として記憶することが可能である。これに相応する変更が、図26に示されている。ステップ910〜924のそれぞれのステップは、図16のステップ610〜624に相応する。ステップ916(制御偏差dfrの計算)の後、判断ステップ925が、図16の手続きに比較して新たに挿入され、判断ステップ925では負荷変化が発生したかどうかが調べられる。ノーの場合、ステップ926で制御偏差dfrが、障害が無い場合の制御偏差dfr0として採用される。この場合、図16の618及び619と異なり、ステップ918及び919で瞬時の制御偏差dfrが、学習値dfr0だけ補正され、6%の固定量だけ補正されるのではない。λ制御が作動してない場合(ステップ910でノーと判断された場合)、ステップ911でλセンサ急激ステップ変化のためのカウンタanzspが、消去され、ステップ921でフラグB_ukaが0にセットされる(図16のステップ611及び621を参照)。その上この場合、ステップ927で制御偏差dfr0が新状態(6%)にセットされる。
【0119】
混合気障害は、劣悪に適応された壁面燃料膜補償の結果として発生するだけでなく、燃料タンク通気孔の活性炭フィルタから空気・燃料混合気を供給する結果としても発生する。タンク通気弁123の開口はしばしば、負荷に依存する方法で制御されるので、これは、タンク通気弁を介しての混合気の供給が、加速プロセスか又は減速プロセスかに依存して大きく変化することを意味する。このようにして、混合気偏差と、同時に検出された負荷変化から、変更された壁面燃料膜特性が存在するとの結論を出すことはもはや可能でない、何故ならば混合気偏差は、燃料排気弁を貫流する流量が変化しても発生するからである。従って、このようなタンク排気弁を有する系統の中では壁面燃料膜補償の適応は、タンク排気弁123を制御するパルス衝撃係数が所定限界値を越えると禁止されなければならない。これは、図16のステップ610で燃料タンク排気弁の制御を調べることにより簡単に行うことができる。この場合、B_lrがセットされており、パルス衝撃係数が所定限界値より大きい場合にステップ611へ分岐する。
【図面の簡単な説明】
【図1】本発明の噴射時間を計算するための制御装置を有する内燃機関の概念図である。
【図2】図2は、壁面燃料膜補償のための方法がただ1つのパラメータを変化する噴射時間を計算するブロック回路図である。
【図3】図3は、複数の壁面燃料膜補償パラメータが補正される図2の構成の1つの変形のブロック回路図である。
【図4】λ制御に重要な動作状態すなわち全負荷状態及びエンジンブレーキ作動状態の検出方法を示すフローチャートである。
【図5】本明細書で説明する方法のための基礎として使用される従来の技術の壁面燃料膜補償方法を示すフローチャートである。
【図6】図5のステップ405の詳細を示すフローチャートである。
【図7】図5及び図6の壁面燃料膜補償から得られる非定常状態動作の際の負荷時間及び噴射時間の経過を示す線図である。
【図8】ネルンストセンサの特性曲線に基づいて、このようなセンサを用いて線形λ信号を求める場合の問題を示す線図である。
【図9】従来の技術の2位置λ制御を示すフローチャートである。
【図10】λ制御の動作能力を検出するフローチャートである。
【図11】λ制御の比例増幅及び積分増幅の計算のためのフローチャートである。
【図12】定常状態動作の際の空燃比を保証する補正係数frを求めるフローチャートである。
【図13】λセンサ信号と、図9〜図12の制御アルゴリズムを基礎にして定常状態動作の際に得られる制御係数frとの時間経過を示す線図である。
【図14】負荷変化及び壁面燃料膜特性の変化に起因して、λ制御器が補償しようとする混合気障害が生成された場合の制御係数frの時間経過を示す線図である。
【図15】負荷変化を、制御係数frの変化に時間的に正しく割当てることを可能にする負荷信号の遅延時間補正の方法を示すフローチャートである。
【図16】制御係数frから出発しての負荷変化の計算と混合気偏差の推測との方法を示すフローチャートである。
【図17】壁面燃料膜補償の補正の方法を示すフローチャートである。
【図18】図16の負荷変化及び混合気偏差を計算する1つの変形のフローチャートである。
【図19】図14の負荷及び制御係数frの経過を示す線図である。
【図20】λセンサ電圧のみに影響しλ制御の制御係数には影響しない短時間混合気の線図である。
【図21】図16、図18及び図19とは異なり制御係数frが使用されるのではなくネルンストセンサのセンサ信号が使用される、負荷変化及び混合気偏差の変化を計算する別の1つの変形のフローチャートである。
【図22】ろ波されたλセンサ電圧の極値を求めるフローチャートである。
【図23】正常状態でのλセンサ電圧と制御信号振幅との比較により混合気偏差を検出するフローチャートである。
【図24】図22の混合気偏差を評価するフローチャートである。
【図25】図21〜図24の方法で必要な壁面燃料膜パラメータの(図17に示されている)補正方法の1つの変形を示すフローチャートである。
【図26】λセンサの老化及びこれに起因する制御領域の変化が考慮される図16の方法の1つの変形のフローチャートである。
【符号の説明】
100 内燃機関ブロック
102 吸気管
104 排気系統
106 空気量センサ
110 絞り弁
111 センサ
112 センサ
114 噴射弁
116 λセンサ
118 センサ
119 温度センサ
120 点火プラグ
121 活性炭フィルタ
122 内燃機関制御装置
123 スポットバルブ(タンク通気弁)
124 導管
Claims (12)
- 基本噴射量信号(tel)を、内燃機関(100)の動作状態と、動作中のλ制御により形成される混合気補正のための信号(fr)とを基礎にして形成し、ただし、該信号(fr)は所望値からの空燃比の偏差を補正するものであり、
過渡補償信号(teukg)を形成し、
前記過渡補償信号(teukg)を、噴射燃料量信号(te)を形成するために基本噴射量信号(tel)に論理結合し、
適応補正信号(fuka)を、前記過渡補償信号(teukg)を求める際に考慮し、
前記適応補正信号(fuka)をλ制御の動作中に混合気補正信号(fr)と基準信号との比較により形成することを特徴とする内燃機関の燃料調量制御装置。 - 混合気補正信号(fr)と基準信号との比較を、前記混合気補正信号(fr)の発生振動の最小値及び最大値に依存する変数により実行することを特徴とする請求項1に記載の内燃機関の燃料調量制御装置。
- 混合気補正信号(fr)と基準信号との比較を、前記混合気補正信号(fr)の2つの順次の半周期の期間に依存する変数を用いて実行することを特徴とする請求項1に記載の内燃機関の燃料調量制御装置。
- 混合気補正信号(fr)と基準信号との比較から適応補正(fuka)を形成するために、空燃比のための推定値(lam)を求めることを特徴とする請求項2又は請求項3に記載の内燃機関の燃料調量制御装置。
- 混合気補正信号(fr)の比較の際に使用される基準信号を、内燃機関(100)が定常作動状態にある時には常に前記混合気補正信号(fr)の時間経過から求めることを特徴とする請求項1から請求項4のうちのいずれか1つの請求項に記載の内燃機関の燃料調量制御装置。
- 基本噴射量信号(tel)を内燃機関(100)の動作状態を基礎に形成し、
過渡補償信号(teukg)を形成し、
前記過渡補償信号(teukg)を前記基本噴射量信号(tel)と論理結合して、噴射燃料量信号(te)を形成し、
適応補正信号(fuka)を、過渡補償信号(teukg)を計算する際に考慮し、
排気ガスセンサ(116)の出力信号(us)を検出し、
混合気障害の発生に関して前記出力信号(us)をλ制御の動作中に検査し、
混合気障害が検出された場合にのみ適応補正信号(fuka)を変化させることを特徴とする内燃機関の燃料調量制御装置。 - 排気ガスセンサ(116)の出力信号(us)と基準信号(us)との比較を、出力信号(us)の発生振動の最小値及び最大値に依存する変数を用いて実行することを特徴とする請求項6に記載の内燃機関の燃料調量制御装置。
- 排気ガスセンサ(116)の出力信号(us)の比較の際に使用する基準信号を、内燃機関(100)が定常動作状態にある時には常に前記出力信号(us)の時間経過から求めることを特徴とする請求項7に記載の内燃機関の燃料調量制御装置。
- 適応補正信号(fuka)の新値を、内燃機関(100)が非定常動作状態にある時には常に形成することを特徴とする請求項1から請求項8のうちのいずれか1つの請求項に記載の内燃機関の燃料調量制御装置。
- 非動作状態を、負荷(tl)の時間変化の絶対値が所定閾値を越えた場合に検出することを特徴とする請求項9に記載の内燃機関の燃料調量制御装置。
- 基本噴射量信号(tel)を、内燃機関(100)の動作状態と、動作中のλ制御により形成される混合気補正のための信号(fr)とを基礎にして形成し、ただし、該信号(fr)は所望値からの空燃比の偏差を補正するものであり、
少なくとも2つの成分から成る過渡補償信号(teukg)を形成し、
前記過渡補償信号(teukg)を基本噴射量信号(tel)と論理結合して、噴射燃料量信号(te)を形成し、
前記過渡補償信号(teukg)の第1の成分を、短時間信号(teukk)と、相応する適応短時間補正信号(fukak)とから形成し、
前記過渡補償信号(teukg)の第2の成分を、長時間信号(teukl)と、対応する適応長時間補正信号(fukal)とから形成し、
排気ガスセンサ(116)の出力信号(us)を検出し、
適応長時間補正信号(fukal)をλ制御の動作中に混合気補正信号(fr)と、対応する基準信号との比較により形成し、
適応短時間補正信号(fukak)を、排気ガスセンサ(116)の出力信号(us)と、対応する基準信号との比較により形成することを特徴とする内燃機関の燃料調量制御装置。 - 異なる内燃機関領域に対して、適応補正信号(fuka)のためのそれぞれ1つの別個の値を求めることができることを特徴とする請求項1から請求項11のうちのいずれか1つの請求項に記載の内燃機関の燃料調量制御装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE4420946.0 | 1994-06-16 | ||
| DE4420946A DE4420946B4 (de) | 1994-06-16 | 1994-06-16 | Steuersystem für die Kraftstoffzumessung bei einer Brennkraftmaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH084570A JPH084570A (ja) | 1996-01-09 |
| JP3834077B2 true JP3834077B2 (ja) | 2006-10-18 |
Family
ID=6520670
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP14786695A Expired - Lifetime JP3834077B2 (ja) | 1994-06-16 | 1995-06-14 | 内燃機関の燃料調量制御装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US5553593A (ja) |
| JP (1) | JP3834077B2 (ja) |
| DE (1) | DE4420946B4 (ja) |
| FR (1) | FR2721351B1 (ja) |
| GB (1) | GB2290632B (ja) |
Families Citing this family (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5682868A (en) * | 1995-09-05 | 1997-11-04 | Ford Global Technologies, Inc. | Engine controller with adaptive transient air/fuel control using a switching type oxygen sensor |
| US5713340A (en) * | 1996-06-12 | 1998-02-03 | Cummins Engine Company, Inc. | System for fueling an internal combustion engine with low and high pressure gaseous fuel |
| DE19755299A1 (de) * | 1997-12-12 | 1999-06-17 | Man Nutzfahrzeuge Ag | Verfahren zur NO¶x¶-Reduzierung an gemischverdichtenden Brennkraftmaschinen |
| DE19842425C2 (de) * | 1998-09-16 | 2003-10-02 | Siemens Ag | Verfahren zur Korrektur der Kennlinie einer linearen Lambda-Sonde |
| DE19911664A1 (de) * | 1999-03-16 | 2000-09-21 | Volkswagen Ag | Kalibrierung eines NOx-Sensors |
| JP3465626B2 (ja) * | 1999-04-28 | 2003-11-10 | 株式会社デンソー | 内燃機関の空燃比制御装置 |
| DE19955649C2 (de) * | 1999-11-19 | 2002-01-10 | Bosch Gmbh Robert | Elektronische Motorsteuerung einer Brennkraftmaschine |
| DE19963929A1 (de) * | 1999-12-31 | 2001-07-12 | Bosch Gmbh Robert | Verfahren zum Betreiben einer Brennkraftmaschine insbesondere eines Kraftfahrzeugs |
| JP2002115585A (ja) * | 2000-10-04 | 2002-04-19 | Toyota Motor Corp | 内燃機関の燃料噴射制御装置 |
| US6675639B1 (en) | 2000-10-25 | 2004-01-13 | Caterpillar Inc | Apparatus and method to detect cylinder faults of internal combustion engines via exhaust temperature monitoring |
| KR100373031B1 (ko) * | 2000-11-20 | 2003-02-25 | 현대자동차주식회사 | 가속시 연료 제어방법 및 시스템 |
| DE10241061B4 (de) * | 2002-09-05 | 2017-07-06 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Ermittlung einer Kraftstoffwandfilmmasse |
| FR2879289B1 (fr) | 2004-12-14 | 2007-02-09 | Renault Sas | Procede et dispositif pour le controle de la dispersion des injecteurs d'un moteur a combustion interne |
| JP4166779B2 (ja) * | 2005-11-28 | 2008-10-15 | 三菱電機株式会社 | 内燃機関制御装置 |
| SE0600149L (sv) * | 2006-01-23 | 2007-04-17 | Gm Global Tech Operations Inc | Metod och anordning för justering av luftbränsleförhållande |
| DE102006033933A1 (de) * | 2006-07-21 | 2008-01-24 | Robert Bosch Gmbh | Verfahren zur automatischen Ermittlung der Güte einer Übergangskompensation |
| DE102007016276A1 (de) * | 2007-04-04 | 2008-10-09 | Volkswagen Ag | Lambda-Regelung mit einer Kennlinienadaption |
| US20080270008A1 (en) * | 2007-04-27 | 2008-10-30 | Paul Spivak | Method and System for Adjusting Fuel Injector Signals for Alternative Fuel Type |
| DE102007062655A1 (de) | 2007-12-24 | 2009-06-25 | Iav Gmbh Ingenieurgesellschaft Auto Und Verkehr | Verfahren zum Einstellen des Luft-/Kraftstoffverhältnisses eines Verbrennungsmotors |
| DE102008020928B4 (de) * | 2008-04-25 | 2014-04-17 | Continental Automotive Gmbh | Verfahren zum Regeln eines Luft-Kraftstoff-Verhältnisses und Verfahren zum Erkennen einer Kraftstoffqualität |
| DE102009032064B3 (de) * | 2009-07-07 | 2010-08-26 | Continental Automotive Gmbh | Verfahren und Vorrichtung zum Betreiben einer Brennkraftmaschine |
| DE102012211683B4 (de) * | 2012-07-05 | 2024-03-21 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Korrektur einer Kennlinie einer Zweipunkt-Lambdasonde |
| DE102013206551A1 (de) * | 2013-04-12 | 2014-10-16 | Robert Bosch Gmbh | Verfahren zur Anpassung der Übergangskompensation |
| DE102015213893A1 (de) * | 2015-07-23 | 2017-01-26 | Robert Bosch Gmbh | Verfahren zum Ermitteln einer Übergangskompensation bei einer Brennkraftmaschine mit Saugrohreinspritzung und Direkteinspritzung |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6011220B2 (ja) * | 1978-12-06 | 1985-03-23 | 日産自動車株式会社 | 燃料噴射装置 |
| DE3636810A1 (de) * | 1985-10-29 | 1987-04-30 | Nissan Motor | Kraftstoffeinspritzregelsystem fuer eine brennkraftmaschine |
| JPH01182552A (ja) * | 1988-01-18 | 1989-07-20 | Hitachi Ltd | 空燃比適応制御装置 |
| JPH07116963B2 (ja) * | 1988-09-19 | 1995-12-18 | 株式会社日立製作所 | 空燃比の補正方法、及び、同補正装置 |
| US4977881A (en) * | 1989-01-19 | 1990-12-18 | Fuji Jukogyo Kabushiki Kaisha | Air-fuel ratio control system for automotive engine |
| DE3939548A1 (de) * | 1989-11-30 | 1991-06-06 | Bosch Gmbh Robert | Elektronisches steuersystem fuer die kraftstoffzumessung bei einer brennkraftmaschine |
| JPH03242445A (ja) * | 1990-02-19 | 1991-10-29 | Japan Electron Control Syst Co Ltd | 内燃機関の燃料供給制御装置における壁流条件学習装置及び壁流補正装置 |
| DE4040637C2 (de) * | 1990-12-19 | 2001-04-05 | Bosch Gmbh Robert | Elektronisches Steuersystem für die Kraftstoffzumessung bei einer Brennkraftmaschine |
| WO1992017697A1 (en) * | 1991-03-28 | 1992-10-15 | Mitsubishi Jidosha Kogyo Kabushiki Kaisha | Air-fuel ratio controller of internal combustion engine |
| US5307276A (en) * | 1991-04-25 | 1994-04-26 | Hitachi, Ltd. | Learning control method for fuel injection control system of engine |
| DE4115211C2 (de) * | 1991-05-10 | 2003-04-30 | Bosch Gmbh Robert | Verfahren zum Steuern der Kraftstoffzumessung bei einer Brennkraftmaschine |
| JP3333941B2 (ja) * | 1992-02-06 | 2002-10-15 | マツダ株式会社 | エンジンの制御装置 |
| JP3378304B2 (ja) * | 1992-08-06 | 2003-02-17 | マツダ株式会社 | エンジンの空燃比制御装置 |
| JP3170067B2 (ja) * | 1992-10-02 | 2001-05-28 | 株式会社日立製作所 | 内燃機関の希薄燃焼制御装置及びこれを備えた燃料噴射量制御装置 |
| DE4243449C2 (de) * | 1992-12-22 | 2001-10-18 | Bosch Gmbh Robert | Elektronisches Steuersystem für die Kraftstoffzumessung bei einer Brennkraftmaschine |
| JP3331650B2 (ja) * | 1992-12-28 | 2002-10-07 | スズキ株式会社 | 内燃機関の空燃比制御装置 |
| DE4323244B4 (de) * | 1993-07-12 | 2005-07-21 | Robert Bosch Gmbh | Elektronisches Steuersystem für die Kraftstoffzumessung bei einer Brennkraftmaschine |
| JP3090564B2 (ja) * | 1993-09-20 | 2000-09-25 | 株式会社日立製作所 | 内燃機関のキャニスタパージ制御方法および装置 |
-
1994
- 1994-06-16 DE DE4420946A patent/DE4420946B4/de not_active Expired - Lifetime
-
1995
- 1995-05-16 FR FR9505768A patent/FR2721351B1/fr not_active Expired - Fee Related
- 1995-06-07 US US08/488,355 patent/US5553593A/en not_active Expired - Lifetime
- 1995-06-14 JP JP14786695A patent/JP3834077B2/ja not_active Expired - Lifetime
- 1995-06-15 GB GB9512211A patent/GB2290632B/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| DE4420946A1 (de) | 1995-12-21 |
| GB2290632B (en) | 1998-08-12 |
| JPH084570A (ja) | 1996-01-09 |
| DE4420946B4 (de) | 2007-09-20 |
| FR2721351A1 (fr) | 1995-12-22 |
| US5553593A (en) | 1996-09-10 |
| GB9512211D0 (en) | 1995-08-16 |
| FR2721351B1 (fr) | 1999-05-21 |
| GB2290632A (en) | 1996-01-03 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3834077B2 (ja) | 内燃機関の燃料調量制御装置 | |
| US5293740A (en) | Method and arrangement for controlling the quantity of fuel for an internal combustion engine having a catalytic converter | |
| US5088281A (en) | Method and apparatus for determining deterioration of three-way catalysts in double air-fuel ratio sensor system | |
| US5806306A (en) | Deterioration monitoring apparatus for an exhaust system of an internal combustion engine | |
| US5143040A (en) | Evaporative fuel control apparatus of internal combustion engine | |
| GB2242545A (en) | Air fuel ratio control for internal combustion engine | |
| US6739310B2 (en) | Method and electronic control device for diagnosing the mixture production in an internal combustion engine | |
| US5528899A (en) | Air-fuel ratio control apparatus for internal combustion engines | |
| EP0478133B1 (en) | Method and apparatus for monitoring deterioration of internal combustion engine exhaust gas purifier | |
| JPS59128944A (ja) | 内燃機関の空燃比制御装置 | |
| KR100240970B1 (ko) | 내연 기관용의 연료 및 공기 혼합물 조성의 제어 방법 | |
| US4878472A (en) | Air-fuel ratio feedback control method for internal combustion engines | |
| US5069035A (en) | Misfire detecting system in double air-fuel ratio sensor system | |
| JPH01244134A (ja) | 燃料制御装置 | |
| JPH03134241A (ja) | 内燃機関の空燃比制御装置 | |
| JP2927074B2 (ja) | 内燃機関の空燃比制御装置 | |
| US5070693A (en) | Air-fuel ratio feedback control system having single air-fuel ratio sensor downstream of or within three-way catalyst converter | |
| JPS6232338B2 (ja) | ||
| JP2760175B2 (ja) | 内燃機関の蒸発燃料処理装置 | |
| JP3946816B2 (ja) | エンジンの空燃比制御装置 | |
| US5107816A (en) | Air-fuel ratio control apparatus | |
| JP3187534B2 (ja) | 内燃機関の空燃比補正方法 | |
| JPH07269407A (ja) | エンジンの失火検出装置 | |
| JP2705267B2 (ja) | 内燃機関の空燃比フィードバック制御装置 | |
| JP2005315110A (ja) | 内燃機関の空燃比制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050527 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050602 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20050830 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20050902 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20051202 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20060622 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20060721 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20100728 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20110728 Year of fee payment: 5 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120728 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120728 Year of fee payment: 6 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130728 Year of fee payment: 7 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| EXPY | Cancellation because of completion of term |