JP3739550B2 - ウェハの測定位置決定方法 - Google Patents
ウェハの測定位置決定方法 Download PDFInfo
- Publication number
- JP3739550B2 JP3739550B2 JP31428697A JP31428697A JP3739550B2 JP 3739550 B2 JP3739550 B2 JP 3739550B2 JP 31428697 A JP31428697 A JP 31428697A JP 31428697 A JP31428697 A JP 31428697A JP 3739550 B2 JP3739550 B2 JP 3739550B2
- Authority
- JP
- Japan
- Prior art keywords
- wafer
- image
- measurement
- stage
- coordinate
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






















Classifications
-
- H—ELECTRICITY
- H01—ELECTRIC ELEMENTS
- H01L—SEMICONDUCTOR DEVICES NOT COVERED BY CLASS H10
- H01L21/00—Processes or apparatus adapted for the manufacture or treatment of semiconductor or solid state devices or of parts thereof
- H01L21/67—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere
- H01L21/68—Apparatus specially adapted for handling semiconductor or electric solid state devices during manufacture or treatment thereof; Apparatus specially adapted for handling wafers during manufacture or treatment of semiconductor or electric solid state devices or components ; Apparatus not specifically provided for elsewhere for positioning, orientation or alignment
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
- G06V10/242—Aligning, centring, orientation detection or correction of the image by image rotation, e.g. by 90 degrees
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30148—Semiconductor; IC; Wafer
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- Manufacturing & Machinery (AREA)
- Computer Hardware Design (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Power Engineering (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Testing Or Measuring Of Semiconductors Or The Like (AREA)
Description
【発明の属する技術分野】
この発明は、半導体ウェハの測定点に関する測定情報を作成し、この測定情報を用いて測定点の位置を決定する技術に関する。
【0002】
【従来の技術】
半導体ウェハは、その製造工程において種々の測定装置によって測定が行われる。測定処理の際には、ウェハ上の予め定められた測定点に測定プローブ(光学素子や電極等)を正確に位置決めする「位置合わせ処理(アライメント処理)」が行なわれる。
【0003】
【発明が解決しようとする課題】
ところで、複数の測定装置を用いて同一の測定を行いたい場合がある。しかし、複数の測定装置にウェハをセットすると、ウェハの向きや位置がそれぞれの装置で異なるので、ウェハ上の測定点の座標も互いに異なる値を取る。従って、従来は、複数の測定装置の間では、測定位置を含む測定情報を流用することができないという問題があった。
【0004】
また、同一の測定装置を用いた場合にも、複数のウェハを載置した場合には各ウェハ上の測定点の座標が互いに異なる値を取ることがある。例えば、測定装置にセットされたウェハの向きが常に正確に一定の向きにならず、或る程度任意の角度を取りうる場合には、測定点の座標は、各ウェハ毎に異なる値を取る。従って、同一の測定装置においても、測定点の位置を正確に決定することが困難であるという問題があった。
【0005】
この発明は、従来技術における上述の課題を解決するためになされたものであり、複数の測定装置の間において測定位置を含む測定情報を流用することができる技術を提供することを第1の目的とする。また、このような測定情報を用いて、ウェハ上の測定点の位置を決定できる技術を提供することを第2の目的とする。
【0006】
【課題を解決するための手段およびその作用・効果】
上述の課題の少なくとも一部を解決するため、この発明の方法は、被測定ウエハを載置するステージを備えた測定装置を用いて被測定ウェハの測定位置を決定する方法であって、
(a)被測定ウェハ上で定義されたウェハ座標系の座標値で表されている測定点の位置を少なくとも含む測定情報を用い、各測定点のウェハ座標系の座標値を前記ステージ上で定義されたステージ座標系の座標値に変換する工程と、
(b)各測定点に関する前記ステージ座標系の座標値を用いて、前記被測定ウェハ上の各測定点の位置決めを実行する工程と、
を備え、
前記測定情報は、前記被測定ウェハ表面の位置合わせ基準点と前記測定点との位置関係を含むとともに、前記被測定ウェハ表面の前記位置合わせ基準点の近傍の画像に対してパターンマッチングを行う際に用いられる第1のテンプレート画像と、前記測定点の近傍の画像に対してパターンマッチングを行う際に用いられる第2のテンプレート画像と、を含み、
前記工程(b)は、
(i)前記位置合わせ基準点の近傍の領域について第1の画像を取り込む工程と、
(ii)前記第1の画像に関して前記第1のテンプレート画像を用いたパターンマッチング処理を含む第1の処理を行うことによって、前記ステージ座標系における前記被測定ウェハの回転方向と前記位置合わせ基準点の位置とを決定する工程と、
(iii)決定された前記回転方向および前記位置合わせ基準点の位置と、予め登録された前記位置合わせ基準点と前記測定点との位置関係に基づいて、前記ステージ座標系における前記測定点の予測位置を決定する工程と、
(iV)前記予測位置の近傍の領域について第2の画像を取り込む工程と、
(V)前記第2の画像に関して前記第2のテンプレート画像を用いたパターンマッチング処理を含む第2の処理を行うことによって、前記測定点の実測位置を決定する工程と、
を備え、
前記工程(ii)における第1の処理は、
前記第1の画像に含まれる直線部分を分析することによって、前記被測定ウェハが取り得る回転角度として、互いに90度の整数倍異なる4つの等価回転角度を決定する工程と、
前記画像に対して前記第1のテンプレート画像を用いたパターンマッチングを行なうことによってマッチングパターンを検出し、前記マッチングパターンの方向に基づいて前記4つの等価回転角度の中からウェハ座標系において予め定められていた1つの基準方向に対応する1つの等価回転角度を選択する工程と、
前記選択された等価回転角度から前記被測定ウェハの回転方向を決定する工程と、
を含むことを特徴とする。
【0007】
上記第1の方法では、測定点の位置がウェハ座標系の座標値で表されているので、複数の測定装置の間において測定点位置を含む測定情報を流用することができる。また、ステージ上に載置されるウェハの位置や向きが常に一定とはならないような測定装置を用いる場合にも、各ウェハ上の測定点の位置を決定するために、この測定情報を用いることができる。
【0008】
上記第1の方法において、
前記測定情報は、さらに、各測定点近傍において撮像された画像についてパターンマッチングを実行することによって測定点の位置を決定する際に使用されるテンプレート画像を含むようにしてもよい。
【0009】
こうすれば、テンプレート画像を用いたテンプレートマッチングを行うことによって、測定点の位置を高精度に決定することができる。
【0010】
本発明の第2の方法は、ウエハを載置するステージを備えた測定装置を用いてウェハの測定位置を決定する方法であって、
(a)上記第1の方法に従って作成された前記測定情報を用い、各測定点のウェハ座標系の座標値を前記ステージ上で定義されたステージ座標系の座標値に変換する工程と、
(b)各測定点に関する前記ステージ座標系の座標値を用いて、前記ウェハ上の各測定点の位置決めを実行する工程と、
を備えることを特徴とする。
【0011】
こうすれば、測定情報内の測定点の座標値を用いて、ウェハ上の測定点の位置を決定することができる。
【0012】
上記第2の方法において、
前記測定装置は、さらに、ウェハ上の画像を撮像するための撮像光学系を備えており、
前記方法は、さらに、
前記撮像光学系で定義された撮像座標系における座標と、前記ステージ座標系における座標との間の回転を含む座標変換を規定する座標変換係数を決定する工程と、
前記座標変換係数を用いて、前記撮像光学系で撮像された撮像画像内における撮像座標系の座標と前記ステージ座標系の座標との間の座標変換を実行する工程と、を含むようにしてもよい。
【0013】
こうすれば、撮像座標系がステージ座標系から傾いている場合にも、撮像画像内の任意の点の位置に関するステージ座標系の座標に正確に求めることができる。
【0014】
【発明の他の態様】
この発明は、以下のような他の態様も含んでいる。第1の態様は、ウェハ上の測定点に関する測定情報を作成する装置であって、
前記ウェハ上における測定点の位置と、各測定点における測定条件とを含む測定情報を作成する測定情報作成手段を備え、
前記測定点の位置は、前記ウェハ上で定義されたウェハ座標系の座標値で表されていることを特徴とする。
【0015】
第2の態様は、ウエハを載置するステージを備えた測定装置を用いてウェハの測定位置を決定する装置であって、
上記の方法または装置によって作成された前記測定情報を用い、各測定点のウェハ座標系の座標値を前記ステージ上で定義されたステージ座標系の座標値に変換する手段と、
各測定点に関する前記ステージ座標系の座標値を用いて、前記ウェハ上の各測定点の位置決めを実行する測定位置決定手段と、
を備えることを特徴とする。
【0016】
第3の態様は、コンピュータに上記の発明の各工程または各手段の機能を実行させるコンピュータプログラムを記録した記録媒体である。記録媒体としては、フレキシブルディスクやCD−ROMなどのコンピュータが読取り可能な携帯型の記憶媒体や、コンピュータシステムの内部記憶装置(RAMやROMなどのメモリ)および外部記憶装置、あるいは、これ以外のコンピュータプログラムが記録された媒体であってコンピュータシステムが読取り可能な種々の媒体を利用できる。
【0017】
第4の態様は、コンピュータに上記の発明の各工程または各手段の機能を実行させるコンピュータプログラムを通信経路を介して供給するプログラム供給装置である。
【0018】
【発明の実施の形態】
A.装置の構成:
次に、本発明の実施の形態を実施例に基づき説明する。図1は、この発明の実施例を適用して半導体ウェハの位置合わせ処理(アラインメント処理)を行なう機能を有する測定装置の構成を示すブロック図である。この測定装置は、制御操作ユニット30と、撮像光学系としての光学ユニット40と、画像処理ユニット50とを備えている。
【0019】
制御操作ユニット30は、表示部31と、操作部32と、制御部33と、ステージ駆動部34と、ステージ座標読み込み部35と、XYステージ36とを備えている。表示部31としては、例えばモニタや液晶ディスプレイ等が使用される。また、操作部32としては、例えばキーボードやマウス等が用いられる。XYステージ36の上には、半導体ウェハWFが載置される。半導体ウェハWFの表面には、タイル状に配列された矩形の複数の半導体チップが形成されている。なお、この装置は、XYステージ36を回転させる機構は有していない。
【0020】
光学ユニット40は、カメラ41と、光源42と、ハーフミラー43と、対物レンズ44とを備えている。ハーフミラー43は、光源42から出射された光を対物レンズ44に向けて反射し、XYステージ36上の半導体ウェハWFに光を照射する。半導体ウェハWFの表面で反射されたは光は、対物レンズ44とハーフミラー43とを通過して、カメラ41に入射する。すなわち、カメラ41は、半導体ウェハWFの表面の画像を撮像する。画像としては、多階調画像(グレー画像)を読取ることが好ましい。なお、この実施例では、カメラ41の視野サイズは、半導体ウェハの表面に形成された半導体チップの1個分のサイズよりも小さい。後で詳述するように、半導体ウェハWFの多階調画像は、画像処理ユニット50によって処理され、これによって半導体ウェハWFの回転方向が検出される。画像処理ユニット50のモニタ136には、半導体ウェハWFの一部の撮像領域の多階調画像が表示される。
【0021】
ユーザが操作部32を操作してXYステージ36に対する移動指令を入力すると、その指令に応じて、制御部33がステージ駆動部34を制御してXYステージ36をX方向とY方向に移動させる。また、操作部32からステージの座標読み込み指令が入力されると、その時点のステージ座標情報がステージ座標読み込み部35によって読込まれて制御部33に供給される。ステージ座標情報は、必要に応じて表示部31に表示される。ステージ座標情報は、さらに、双方向の通信経路38を介して制御部33から画像処理ユニット50にも供給される。後述するように、画像処理ユニット50は、画像処理によって認識されたウェハの回転方向と、このステージ座標情報とを利用することによって、ウェハの正確な回転方向や測定位置を決定する。
【0022】
図2は、画像処理ユニット50の内部構成を示すブロック図である。この画像処理ユニット50は、CPU110と、ROM114と、RAM116と、入出力インタフェイス140とが、バスライン112に接続されたコンピュータシステムとして構成されている。入出力インタフェイス140には、モニタ136と、磁気ディスク138と、通信経路38とが接続されている。
【0023】
RAM116には、等価回転方向決定手段150と、撮像位置決定手段152と、パターンマッチング手段154と、角度選択手段156と、回転方向決定手段158と、基準位置決定手段160と、測定位置決定手段162と、座標変換手段164と、測定情報作成手段166と、の機能を実現するアプリケーションプログラムが格納されている。これらの各手段の機能については後述する。
【0024】
なお、これらの各手段の機能を実現するコンピュータプログラム(アプリケーションプログラム)は、フレキシブルディスクやCD−ROM等の携帯型の記録媒体(可搬型の記録媒体)に記録された形で提供され、この記録媒体からコンピュータシステムの外部記憶装置に転送される。そして、実行時には、RAM116に記憶される。あるいは、通信経路を介してプログラム供給装置からコンピュータシステムにコンピュータプログラムを供給するようにしてもよい。この明細書において、コンピュータシステムとは、ハードウェアとオペレーションシステムとを含み、オペレーションシステムの制御の下で動作する装置を意味している。アプリケーションプログラムは、このようなコンピュータシステムに、上述の各部の機能を実現させる。なお、上述の機能の一部は、アプリケーションプログラムでなく、オペレーションシステムによって実現されていても良い。
【0025】
B.位置合わせ処理の概要:
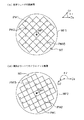
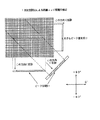
図3は、実施例における位置合わせ処理の概要を示す説明図である。基準ウェハ(図3(A))とは、位置合わせ処理の対象となる被測定ウェハ(図3(B))と同じパターンが形成されたウェハである。一般的には、同一のロットで処理された複数のウェハの1枚を基準ウェハWF1として使用し、他のウェハが被測定ウェハWF2となる。1枚のウェハには、位置合わせ基準点RPと、複数の測定点PM1〜PM15(白丸で示す)とが設定される。図3(A),(B)にも示されているように、ウェハがXYステージ36上に載置された時には、任意の回転方向を取りうるものと仮定している。ステージ36上にウェハを搬送するための搬送装置(図示せず)の構成によっては、ウェハのノッチNTがほぼ所定方向(例えば時計の6時方向)を向くようにウェハが載置される場合もある。しかし、このような場合でもウェハの向きが正確に調整されるとは限らず、或る程度傾いた状態でステージ36上に載置されることが多い。そこで、この実施例では、ウェハが任意の向きを取り得るものと仮定している。なお、図1に示す測定装置は、XYステージ36上に載置されたウェハを回転するための回転機構を備えていないので、ウェハの向き(回転方向)は、画像処理によって認識され、補正される。
【0026】
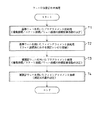
図4は、実施例における位置合わせ処理の全体手順を示すフローチャートである。ウェハの測定点の位置合わせ処理は、基準ウェハを用いたプリアライメント前処理(ステップT1)と、基準ウェハを用いたファインアライメント前処理(ステップT2)と、被測定ウェハを用いたプリアライメント処理(ステップT3)と、被測定ウェハを用いたファインアライメント処理(ステップT4)とに大別される。ステップT1,T3におけるプリアライメント処理は、基準位置決定手段160(図2)の制御の下に、測定位置決定手段162以外の他の手段150,152,154,156,158,164が協力して実行する。ステップT2,T4におけるファインアライメント処理は、測定位置決定手段162の制御の下に、撮像位置決定手段152とパターンマッチング手段154と撮像光学系座標変換手段164とが協力して実行する。
【0027】
図4のステップT1における基準ウェハWF1を用いたプリアライメント前処理では、撮像座標とステージ座標との間の座標変換係数と、ステージ座標とウェハ座標との間の座標変換係数とが決定される。ここで、「撮像座標」とは、撮像光学系である光学ユニット40で撮像された撮像画像の領域内で定義された座標系(「撮像座標系」と呼ぶ)の座標である。「ステージ座標」は、XYステージ36上で定義された座標系(「ステージ座標系」と呼ぶ)の座標であり、「ウェハ座標」は、ウェハ上で定義された座標系(「ウェハ座標系」と呼ぶ)の座標である。
【0028】
ステージ座標とウェハ座標との間の座標変換係数は、XYステージ36上に載置された基準ウェハWF1の回転角度θ1と、位置合わせ基準点RPのステージ座標値とから決定される(図3(A))。ここで、基準ウェハWF1の回転角度θ1は、ステージ座標系の基準方向Dsと基準ウェハWF1の基準方向D1とのなす角度である。ステージ座標系の基準方向Dsは、XYステージ36に対して固定された方向であり、例えばXYステージ36上のX方向(時計の3時方向)に設定される。基準ウェハWF1の基準方向D1は、基準ウェハWF1に対して固定された方向であり、例えば基準ウェハWF1のノッチNTを時計の6時方向とした時の3時の方向に設定される。なお、これらの基準方向Ds,D1の設定の仕方は任意であり、これ以外の定義も可能である。
【0029】
ステップT2における基準ウェハWF1を用いたファインアライメント前処理では、基準ウェハWF1上の複数の測定点PM1〜PM15の位置と、各測定点における測定条件とを含む測定レシピを登録する。各測定点の位置は、ウェハ座標系の座標値として登録される。なお、ステップT1,T2で決定された各種の情報を含む測定レシピ139は、測定情報作成手段166によって作成されて磁気ディスク138に格納される。
【0030】
ステップT3,T4は、被測定ウェハWF2を用いたプリアライメント処理とファインアライメント処理である。ステップT3のプリアライメント処理では、ステップT1と同様に、撮像座標とステージ座標との間の座標変換係数と、ステージ座標とウェハ座標との間の座標変換係数とが決定される。また、ステップT4のファインアライメント処理では、測定レシピ139を用いて、各測定点の位置が決定されるとともに、各測定点において測定が実行される。
【0031】
被測定ウェハWF2に関するステップT3,T4の処理は、ステップT1,T2で用いた測定装置と同じ装置で実行することも可能であり、また、別の測定装置を用いて実行することも可能である。同じ測定装置を用いる場合には、撮像座標とステージ座標との座標変換の係数はステップT1で求めたものと同じものを使用することができる。しかし、被測定ウェハWF2の向きは、図3(B)に示すように任意の向きを取り得ると仮定しているので、ステージ座標とウェハ座標との座標変換の係数はステップT3において改めて求められる。
【0032】
一方、ステップT1,T2で使用されたものとは異なる他の測定装置を用いて測定を行う場合には、ステップT3においてステップT1と同様な処理が行われ、撮像座標とステージ座標との座標変換の係数も決定される。なお、ステップT3,T4において他の測定装置を用いる場合には、基準ウェハWF1(第1のウェハ)を用いたステップT1,T2の処理を行う測定装置を「第1の測定装置」と呼び、被測定ウェハWF2(第2のウェハ)を用いたステップT3,T4の処理を行う測定装置を「第2の測定装置」と呼ぶ。第1と第2の測定装置は、同じ構成を有していてもよく、また、互いに異なる構成を有していてもよい。
【0033】
C.基準ウェハを用いたプリアライメント前処理:
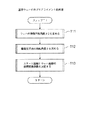
図5ないし図8は、基準ウェハWF1を用いたプリアライメント前処理の手順を示すフローチャートである。図5のステップT11では、基準ウェハWF1の画像回転角度β1が求められる。以下に説明するように、画像回転角度β1は、光学ユニット40で撮像した画像を回転して、正立した画像を得るための角度である。
【0034】
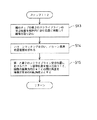
図6は、ステップT11の詳細手順を示すフローチャートである。ステップS1では、ウェハのチップ寸法と、X軸方向およびY軸方向のチップ個数とをユーザが入力する。
【0035】
図9は、半導体ウェハの表面に形成されたチップの配列を示す概念図である。半導体ウェハWFの表面上には、同一サイズの矩形の複数のチップCPがタイル状に配置される。X軸方向とY軸方向に沿ったチップ個数の偶数と奇数の組合わせは、偶数−偶数、奇数−偶数、偶数−奇数、奇数−奇数の4通りある。図9(A)は偶数−偶数の例であり、図9(B)は、偶数−奇数の例である。このような4通りの組み合わせのいずれであるかを示す情報と、チップの縦横のピッチLX,LYとから、ウェハの中心Oを基準にして、中心付近のチップの位置を算出することができる。従って、ステップS1では、少なくともチップ個数の4通りの組合わせのいずれであるかを示す情報と、チップのピッチLX,LYを示す情報とが入力される。
【0036】
図6のステップS2では、基準ウェハWF1の中心位置において多階調画像(グレー画像)がカメラ41によって取り込まれる。ウェハが最初にXYステージ36上に載置される時には、図9に示すように、ウェハの外周が、XYステージ36のウェハ保持アーム36a,36bで保持されて、XYステージ36のほぼ中央に位置決めされる。この状態において、カメラ41によって撮像すると、ウェハの中心付近の画像を得ることができる。
【0037】
図10は、ウェハの中心付近を拡大して示す概念図である。この実施例では、各チップCPの右上の角に、他の3つの角にはない特徴的なパターンPTが形成されているものとする。このパターンPTを含む画像部分は、後述するパターンマッチングにおいて、第1のテンプレート画像として利用される。チップCPは、直交するスクライブラインSLによって区分されている。ウェハ表面を撮像して得られた多階調画像では、スクライブラインSLは暗領域として識別されることもあり、あるいは、明領域として識別されることもある。いずれの場合においても、スクライブラインSLは、チップCPとは明度が異なる領域として識別可能である。
【0038】
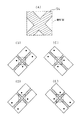
図10には、チップ個数の4種類の組み合わせに応じたカメラ41の視野W1〜W4の位置が例示されている。前述したように、カメラ41の視野サイズは、チップ1個分のサイズよりも小さいので、視野内に1個のチップがすべて含まれることはない。第1の視野W1は、チップ個数が偶数−偶数の場合におけるウェハ中央での撮像領域に相当する。この視野W1は、スクライブラインSLの交点のほぼ中心に位置している。第2の視野W2は、チップ個数が偶数−奇数の場合におけるウェハ中央での撮像領域に相当する。この視野W2は、2つのチップに挟まれた位置にある。第3の視野W3は、チップ個数が奇数−偶数の場合におけるウェハ中央での撮像領域に相当する。この視野W3も、チップに挟まれた位置にある。第4の視野W4は、チップ個数が奇数−奇数の場合におけるウェハ中央での撮像領域に相当する。この視野W4も、2つのチップのほぼ中央に挟まれた位置にある。なお、実際には、基準ウェハWF1の向きは図10の位置から回転しているので、視野W1〜W4は、スクライブラインSLで示される正規の方位から傾いた状態となる。
【0039】
図6のステップS2では、ウェハの中心位置において画像を取り込むので、図10の視野W1〜W4のいずれかの位置における画像が得られる。この画像は、次のステップS3において、画像内に含まれる直線部分(スクライブラインSL等)を認識するために使用される。チップの個数が奇数−奇数の場合には、図10の第4の視野W4のように直線部分が含まれない可能性が高い。そこで、この場合には、チップのピッチLXまたはLYの1/2だけウェハの中心からずらした位置において撮像するようにしてもよい。
【0040】
図6のステップS3では、等価回転方向決定手段150(図2)が、画像に含まれる直線エッジ情報を検出するとともに、その直線エッジ情報から、基準ウェハの粗回転角度を決定する。「粗回転角度」とは、直線エッジ情報から得られる比較的低精度の回転角度を意味する。直線エッジ情報の抽出方法としては、以下に説明する1次元投影法やソベルオペレータ法等を利用することができる。
【0041】
図11は、1次元投影法による直線エッジ情報の検出処理を示す説明図である。図11には、水平方向にのみ直線部分が存在する2次元多階調画像が示されている。1次元投影法では、この2次元多階調画像を種々の方向に1次元投影して、画素値を加算する。直線部分に平行な方向に投影した場合には、直線部分が存在する座標における画素値が大きなピーク値を持つ。一方、直線部分と平行でない方向に投影した場合には、加算された画素値のピーク値はこれよりも小さくなる。このように、2次元画像をさまざまな方向に1次元投影して、画素値の累算値のピーク値が最大となる投影方向を、直線部分の方向として決定することができる。投影方向は、180°の範囲にわたる複数の投影方向を選択するようにすればよい。この直線部分の方向から、粗回転角度が決定される。例えば、ステージ座標系(XYステージ36に固定された座標系)の所定の方向(例えば時計の3時方向)を基準方向として、この基準方向から反時計回りに直線部分の方向まで測った角度を粗回転角度とすることができる。
【0042】
図12ないし図14は、ソベルオペレータ法による直線エッジ情報の検出処理を示す説明図である。図12は、ソベルオペレータによる画像処理の方法を示している。ソベルオペレータ法では、まず、図12(A−1)または(A−2)に示すような、エッジ画素を含む所定サイズの画素ブロック(図12の例では、3×3ブロック)を多階調画像の中から選択する。ここで、「エッジ画素」は、「8近傍の画素のうちで、少なくとも1つの画素の画素値が、自分自身(図12(A−1),(A−2)の中心画素)の画素値と異なっており、かつ、画像の境界上にない画素」と定義される。図12(A−1)では、画像の角部分の画素がエッジ画素として認識される状態を示しており、図12(A−2)では、直線部分の画素がエッジ画素として認識される状態を示している。エッジ画素の識別は、3×3ブロックを多階調画像内で走査し、ブロックの中央画素が上記の定義に合致するか否かを判断することによって行なわれる。
【0043】
図12(B−1),(B−2)は、水平方向と垂直方向のソベルオペレータをそれぞれ示している。エッジ画素を含む3×3ブロックに対して、これらの水平方向オペレータと垂直方向オペレータとをそれぞれ作用させることによって、水平エッジ値と垂直エッジ値とがそれぞれ求められる。図12(C)は、水平方向オペレータを作用させた場合の演算の例を示している。水平方向オペレータを3×3ブロックの画素値に作用させると水平エッジ値が得られ、同様にして、垂直方向オペレータを3×3ブロックの画素値に作用させると垂直エッジ値が得られる。
【0044】
図13は、ソベルオペレータを用いて得られた水平エッジ値xと垂直エッジ値yとから、画像の直線部分の角度を算出する方法を示す説明図である。図13(A)に示すように、画像の直線部分の角度αは、tan-1(y/x)で与えられる。ここで、角度αは、水平右向き方向(時計の3時方向)から反時計回りに測った角度である。例えば、図13(B)の例では、垂直エッジ値が0であり水平エッジ値が4なので、角度αは0°であると判定できる。また、図13(C)の例では、垂直エッジ値と水平エッジ値がいずれも1なので、角度αは45°であると判定できる。なお、角度αは0°〜180°の範囲の値を取るものとする。180°〜360°の範囲は、0°〜180°の範囲と等価である。
【0045】
図14は、処理対象となる多階調画像の一例と、この多階調画像からソベルオペレータ法によって検出された角度αのヒストグラムを示す説明図である。図14(A)に示す多階調画像内において、図12(A−1)または図12(A−2)のようなエッジ画素を中心画素とする3×3ブロックを検出し、エッジ画素を含む各3×3ブロックについて図13に示す方法で角度αを決定する。図14(B)は、このようして多数の3×3ブロックについて得られた角度αの頻度を示すヒストグラムである。この例では、40°と130°の位置にピークが存在し、40°の位置のピークが最大である。この時、最大ピーク位置の角度α1を、多階調画像内の直線部分の回転方向を示す粗回転角度であるとして採用する。
【0046】
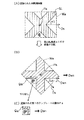
なお、上述した1次元投影法やソベルオペレータ法を用いて検出された粗回転角度α1には、90°の整数倍異なる4つの等価な角度が存在する。換言すれば、粗回転角度α1は、1/4の不確定さを有している。図15は、4つの等価回転角度を示す説明図である。図15(A)に示すように、カメラ41の視野W内にスクライブラインSLの交点付近の画像が見えている場合を考える。この実施例ではカメラ41の視野サイズがチップサイズに比べて小さいので、チップの回転方向が図15(B)〜(E)の4種類のいずれであるかを画像データから特定することができない。従って、ウェハの正しい回転角度は、90°おきの4つの等価な回転角度の中の1つである。図6のステップS3においては、この4つの等価な回転角度の少なくとも1つを粗回転角度として検出する。等価な回転角度の1つが検出できれば、他の等価な回転角度も検出できたものと考えることができる。
【0047】
なお、ステップS3において得られる直線エッジ情報とその粗回転角度は、ほとんどの場合はスクライブラインSLのものである。但し、スクライブラインSLに限らず、ウェハの多階調画像内に存在する直線的な画像部分に関する直線エッジ情報やその粗回転角度を検出してもよい。チップ内の回路が有する直線的な部分は、スクライブラインSLに平行なものがほとんどである。従って、スクライブラインSL以外の直線的画像部分を検出しても、ウェハの粗回転角度を求めることができる。
【0048】
図6のステップS4では、ステップS3で検出された直線エッジ情報が信頼できるか否かが判定される。この判定は、例えば、図13に示す1次元投影法を用いた場合には、累算画素値のピーク値が所定の閾値以上であるか否かによって行なうことができる。また、図12〜図14に示すソベルオペレータ法を用いた場合には、図14(B)のヒストグラムのピーク値が所定の閾値以上であるか否かによって判定することができる。あるいは、モニタ136にウェハの画像を表示しておけば、はっきりとした直線エッジが画像内に含まれるか否かをユーザが目視で判定することができる。直線エッジ情報が信頼できないものである場合には、ステップS5において、XYステージ36を所定量(例えば1視野分)だけ移動させ、ウェハ中心付近の別の位置において多階調画像を取り込む。そして、ステップS3を再度実行することによって直線エッジ情報を検出し、粗回転角度α1を求める。
【0049】
こうして、粗回転角度α1が求められると、ステップS6において、撮像位置決定手段152が、ウェハの中心付近においてスクライブラインSLの交点位置を視野に含むように、XYステージ36の目標位置座標を算出して移動させる。前述したように、X軸方向とY軸方向に沿ったチップの個数の4種類の組み合わせ(偶数−偶数、偶数−奇数、奇数−偶数、奇数−奇数)によって、ウェハの中心における初期の視野の位置は図10に示す4つの視野W〜W4の位置にほぼ決まっている。撮像位置決定手段152(図2)は、ステップS3で得られた粗回転角度α1と、チップの寸法(ピッチLX,LY)と、チップの個数情報から、X方向とY方向にそれぞれどの程度移動させればスクライブラインSLの交点位置を視野内に含む位置に移動できるかを算出する。画像処理ユニット50は、この移動量を制御部33(図1)に通知して、XYステージ36を移動させる。その後、カメラ41によって多階調画像を再度撮像する。なお、粗回転角度α1には1/4の不確定さがあるので、1回の移動によって、視野の中心がスクライブラインSLの交点位置に到達できるとは限らない。この場合には、例えばウェハの中央位置を中心として90°回転した方向に移動方向を変更して、同じ距離だけ移動すれば、スクライブラインSLの交点位置に視野(すなわち撮像領域)の中心を移動させることができる。図16は、スクライブラインSLの交点位置に視野の中心を移動させた状態を示している。図16に示したように、ウェハの直線部分(スクライブラインSL)の方向は、ステージ座標系の基準方向Dsから粗回転角度α1だけ回転している。ステップS6においてカメラ41で取り込んだ画像はモニタ136に表示される。
【0050】
図6のステップS7では、ステップS6で取り込まれた画像を時計回りに粗回転角度α1だけ回転させる画像処理を行う。ステップS8では、撮像位置決定手段152が、スクライブラインSLの交点Paのステージ座標値を求めて、これを保存する。スクライブラインSLの交点位置の座標値は、後に、基準ウェハWF1の位置合わせ基準点を決定する際に使用される。基準ウェハのスクライブラインSLの交点位置は、例えば、図16に示すカメラ41の視野Waの中心点Paの座標で代表される。この点Paの位置は、ユーザがモニタ136に表示された画像上において、マウス等のポインティングデバイスを用い、カーソルを移動させて指定することができる。あるいは、カメラ41で取り込んだ多階調画像を処理することによって、スクライブラインSLの交点の中心位置の座標を自動的に決定することも可能である。画像処理で交点の中心位置を求める場合には、まず、前述したステップS3と同様な方法に従って直線エッジを検出する。そして、スクライブラインSLのエッジを近似した直線を求める。さらに、これらの近似直線で構成される4つの角部の中心位置を、スクライブラインSLの交点位置として決定する。なお、視野Waの原点は、視野Wa内の所定の位置(例えば視野の左下点)に設定され、この原点を基準にして撮像座標が定義される。撮像画像の原点のステージ座標系の座標は、ステージ座標読み込み部35(図1)で取り込まれた座標値で示される。視野Wa内の任意の位置のステージ座標系の座標は、視野Wa内の撮像座標系におけるその任意の位置の座標値と、視野Waの原点のステージ座標値とから算出される。
【0051】
なお、ステップS8においては、第1のテンプレート画像MPaの基準点Qaと、スクライブライン交点Paとのステージ座標値のオフセット(δx,δy)も測定される。
【0052】
図6のステップS9では、ステップS7で回転した画像の中からパターンマッチング用の第1のテンプレート画像(モデルパターンとも呼ぶ)を切り出して登録する。図17は、第1のテンプレート画像MPaの登録の様子を示す説明図である。ステップS7では、まず、スクライブラインSL交点位置における多階調画像(図17(A))を、図17(B)に示すように粗回転角度α1だけ時計回りに回転させて、回転後の画像をモニタ136に表示する。画像の回転は、アフィン変換によって実行される。ユーザは、表示された画像を観察して、テンプレート画像MPaとして使用できる画像パターンが存在するか否かを判断する。テンプレート画像MPaとして使用できる画像パターンとは、その画像パターンの向きから、粗回転角度α1として等価な4つ等価回転角度の中の1つを選択できるような画像パターンを意味する。テンプレート画像MPaとしては、90°の整数倍の回転対称性が無い画像パターンが好ましい。換言すれば、90°の整数倍の回転対称性(90°,180°,270°の回転対称性)のいずれかを有する画像パターンは、テンプレート画像MPaとしては不適切である。スクライブラインSLの交点付近の視野Waには、隣接する4つのチップのそれぞれの角部が含まれるので、これらの4つの角部の内の1つにのみ含まれる特有の画像パターンを第1のテンプレート画像MPaとして登録することができる。
【0053】
現在の視野Wa内にテンプレート画像MPaとして使用できる画像パターンが存在しない場合には、カメラ41で取り込んだ画像をモニタ136に表示して観察しながら、XYステージ36を少しずつ移動させる。そして、テンプレート画像MPaとして使用できる画像パターンが視野内に入る状態に設定する。
【0054】
現在の視野Wa内にテンプレート画像MPaとして使用できる画像パターンが存在する場合には、図17(B),(C)に示すように、回転後の画像内からテンプレート画像MPaとして登録する領域を切り出す。テンプレート画像MPaの範囲は、ユーザがマウス等のポインティングデバイスを用いて指定する。テンプレート画像MPaは、スクライブラインSLの交点付近に存在すれば望ましいが、必ずしも交点付近に存在しなくても良い。なお、テンプレート画像MPaは、画像内の直線エッジを基準としたときに正立した状態で、測定レシピ139内に登録される。ここで、「正立した状態」とは、テンプレート画像MPaの矩形領域の各辺が、画像内の直線エッジとほぼ平行または垂直になる状態を意味する。
【0055】
図6のステップS10では、第1のテンプレート画像MPaの画像と、テンプレート画像MPaの所定位置にある基準点(例えば図17(C)に示す左上点Qa)のステージ座標値が測定される。
【0056】
図6のステップS11では、ユーザが、回転して切り出したテンプレート画像MPaの所定の方向(例えば時計の3時の方向)を、撮像画像における基準方向(0°方向)Dw1であると定めることによって、画像回転角度β1を決定する。例えば、図17(B)に示すように、粗回転角度α1だけ時計廻りに回転した画像において、時計の3時方向が撮像画像における基準方向Dw1として設定される。なお、この基準方向Dw1は、図3(A)に示す基準方向D1とほぼ一致しているが、後述する撮像光学系の回転角度だけ異なる方向である。なお、ユーザが基準方向Dw1を指定せずに、自動的に時計の3時方向が基準方向Dw1として設定されるようにしてもよい。ウェハの画像回転角度β1は、ステージ座標系の基準方向Dsから、撮像画像の基準方向Dw1までの角度である。従って、図17(B)の場合には、基準ウェハの画像回転角度β1は、粗回転角度α1に等しい。なお、撮像画像の基準方向Dw1を、時計の3時方向以外の方向に選択した場合には、基準ウェハの画像回転角度β1はα1とは異なる値となる。しかし、この場合にも、粗回転角度α1に所定の値を加算または減算した値が画像回転角度β1になる。例えば、図17(B)の状態において、時計の12時方向が撮像画像の基準方向Dw1として選択された場合には、基準ウェハWF1の画像回転角度β1は、(α1+90°)となる。図6のステップS12では、この画像回転角度β1の値が測定レシピ139に保存される。
【0057】
光学ユニット40で撮像された画像は、この画像回転角度β1だけ回転しているので、以下の処理において画像が撮像される際には、この画像回転角度β1だけ撮像画像を回転することによって正立させ、正立した画像に関して処理が実行される。
【0058】
ところで、光学ユニット40の光学素子(例えばCCDカメラ41)がステージ座標系から傾いて取り付けられている場合には、光学ユニット40で撮像された画像内で定義される撮像座標系が、ステージ座標系から傾いた状態になる。図18は、撮像座標系の座標(U,V)icとステージ座標系の座標(X,Y)scとの関係を示す説明図である。この図において、座標値の括弧の後の添え字「ic」は撮像座標系の座標であることを意味しており、「sc」はステージ座標系の座標であることを意味している。撮像座標系の座標原点は、視野Waの左下点に設定されており、そのステージ座標系の座標値は(X1,Y1)scである。また、撮像座標系の座標軸U,Vはステージ座標系の座標軸X,Yから角度δだけ反時計方向に回転している。この角度δは、光学ユニット40の光学素子の取付誤差等に起因するものであり、以下では「撮像光学系の回転角度」と呼ぶ。撮像座標(U,V)icとステージ座標(X,Y)scとの間の座標変換は、以下の数式1に示す2次元アフィン変換で与えられる。
【0059】
【数1】

撮像座標(U,V)icをステージ座標(X,Y)scに正確に変換するためには、撮像光学系の回転角度δを知る必要がある。そこで、図5のステップT12では、この撮像光学系の回転角度δが測定される。
【0061】
図7は、ステップT12の詳細手順を示すフローチャートである。ステップS13では、撮像画像の基準方向Dw1に沿って、第1のスクライブライン交点に隣接する第2のスクライブライン交点の位置に撮像領域が来るようにXYステージ36を移動させて画像を撮像する。この移動では、撮像画像の基準方向Dw1に沿って、チップのX方向ピッチLX(図9(A))だけ移動するようにXYステージ36が制御される。但し、この移動の際には、ステージ座標系の基準方向Dsと、撮像座標系の水平軸(U軸)とが一致していると見なしている(すなわちδ=0と考えている)ので、実際には画像の回転角度δだけずれた方向に沿って移動が行われる。第2のスクライブライン交点位置で撮像された画像は、前述した画像回転角度β1(図17(B))だけ回転される。
【0062】
図19は、第1と第2のスクライブライン交点付近で撮像された画像の視野Wa,Wbを示している。図7のステップS14では、第2のスクライブライン交点付近で撮像された画像について、パターンマッチング処理を行なうことによって、第1のテンプレート画像MPaと同じ画像パターン(マッチングパターン)MPbを検出する。そして、マッチングパターンMPbを検出した後に、その基準点Qbのステージ座標値を測定する。このときにも、画像の回転角度δは0と仮定している。そして、2つの画像パターンMPa,MPbの基準点Qa,Qb同士を結ぶ直線の方向を、基準ウェハWF1の正確な基準方向D1として決定する。この基準方向D1は図3(A)に示すものと同じである。ウェハの基準方向D1は、2つの基準点Qa,Qbのステージ座標値から決定されているので、ウェハの正確な基準方向を示している。一方、画像の直線エッジから決定された画像の基準方向Dw1は、撮像光学系の回転角度δが0°であるとの仮定の下で得られているので、ウェハの正確な基準方向D1から撮像光学系の回転角度δだけずれているはずである。そこで、図7のステップS15では、ウエハの基準方向D1と画像の基準方向Dw1との間の角度を、撮像光学系の回転角度δとして決定する。
【0063】
なお、撮像光学系の回転角度δを用いるために使用された2つの基準点Qa,Qbのステージ座標値は、回転角度δが0°であると仮定したときの値なので、正確にはこの回転角度δだけのずれを含んでいる。しかし、2つの基準点Qa,Qbの座標値が同じ回転角度δだけずれているので、ウェハの基準方向D1を決定する際にそのずれは相殺され、この結果、正しい基準方向D1を得ることができる。
【0064】
図19の下部に示すように、ウェハの基準方向D1と、ステージ座標系の基準方向Dsとの間の角度θ1は、基準ウェハWF1の正確な回転角度を示している。このウェハの回転角度θ1は、画像回転角度β1と、撮像光学系の回転角度δとの和である。換言すれば、画像回転角度β1は、ウェハの回転角度θ1から撮像光学系の回転角度δを減算した値に等しい。
【0065】
撮像画像内の任意の位置の座標は、こうして得られた撮像光学系の回転角度δを用いて、前述の数式1に従って撮像座標(U,V)icからステージ座標(X,Y)scに変換される。逆に、ステージ座標(X,Y)scを撮像座標(U,V)icに逆変換することも可能である。なお、撮像光学系の回転角度δを求める前にステップT11,T12で得られていた各点のステージ座標値については、各点の撮像座標値から数式1に従って正確な値が改めて算出される。
【0066】
図5のステップT13では、ステージ座標とウェハ座標との間の座標変換係数が決定される。図8は、ウェハ座標とステージ座標との間の座標変換係数を決定するためのステップT13の詳細手順を示すフローチャートである。まずステップS14では、第1のスクライブライン交点位置から対角方向にある第3のスクライブライン交点位置に撮像領域が来るようにXYステージ36を移動させて画像を撮像する。ステップS17では、この画像について、パターンマッチングを行なうことによって、第1のテンプレート画像MPaと同じ画像パターン(マッチングパターン)MPcを検出する。
【0067】
図20は、ステップS16,S17の処理内容を示す説明図である。この例では、第1のテンプレート画像MPaの登録を行なった交点位置から斜め右下に隣接する第3の交点位置に視野Wcを移動させている。
【0068】
ステップS17においては、マッチングパターンMPcを検出した後に、その基準点Qcのステージ座標値も算出する。ステップS18では、第3のスクライブライン交点Pc(図20)の位置が決定される。このとき、第3のスクライブライン交点PcとマッチングパターンMPcとの位置関係は、第1のスクライブライン交点Paとテンプレート画像MPaとの位置関係と等しいものと仮定される。従って、第3のスクライブライン交点Pcの位置は、マッチングパターンMPcの基準点Qcの位置と、第1のスクライブライン交点Paとテンプレート画像MPaの基準点Qaの相対位置とに基づいて算出される。
【0069】
あるいは、第1のスクライブライン交点Paの決定方法と同様の方法によって、第3のスクライブライン交点Pcの位置を決定するようにしても良い。すなわち、第3のスクライブライン交点Pcの位置をユーザが指定してもよく、また、第3の視野Wc内の画像を解析することによって、第3のスクライブライン交点Pcの位置を自動的に決定するようにしてもよい。
【0070】
ステップS19では、第1と第3のスクライブライン交点Pa,Pcの中点Pacのステージ座標が算出され、位置合わせ基準点(図3(A)の点RP)の座標値として測定レシピ139に保存される。この位置合わせ基準点RPは、各測定点の位置を決定するときの原点(すなわちウェハ座標系の座標原点)として使用される。この実施例では、位置合わせ基準点RPの座標が、スクライブラインで規定される格子の対角方向にある2つのスクライブライン交点Pa,Pcの座標から決定されているので、その位置を高精度に設定することができる。
【0071】
なお、位置合わせ基準点としては、この他にも種々の設定方法がある。例えば、2つの画像パターンMPa,MPcの基準点Qa,Qcの中点Qacを位置合わせ基準点として使用することもできる。さらに、スクライブライン交点Pa,Pcと基準点Qa,Qcの中の1つの点を、位置合わせ基準点として選択することも可能である。
【0072】
基準ウェハWF1の回転角度θ1は、前述した図19に示したように、画像回転角度β1と、撮像光学系の回転角度δとの和として得られていたが、この代わりに、2つの画像パターンMPa,MPcの基準点Qa,Qc同士を結ぶ直線の方向からウェハの回転角度θ1を決定することも可能である。この場合には、図20の下部に示すように、2つの基準点Qa,Qcの連結方向DL1から所定の角度Δθだけ回転した方向が、ウェハの基準方向D1として採用される。2つの基準点Qa,Qcは格子状に配列されたチップの対角方向に存在するので、この角度Δθの値は、tan Δθ=LY/LX(LX,LYはチップのピッチ)で与えられる。ウェハの正確な回転角度θ1は、このウェハの基準方向D1とステージ座標系の基準方向Dsとの間の角度である。こうして回転角度θ1を決定した場合には、この回転角度θ1から画像の回転角度β1を減算することによって、撮像光学系の回転角度δを求めることも可能である(図19参照)。この場合には、図5のステップT12(図7のステップS13〜S15)を省略することができる。
【0073】
図5のステップT13では、こうして得られた位置合わせ基準点RPのステージ座標(XRP,YRP)と、基準ウェハWF1の正確な回転角度θ1から、ステージ座標(X,Y)とウェハ座標(ξ,η)との間の座標変換の係数が決定される。この座標変換係数は、次の数式2で表される2次元アフィン変換の右辺の3×3行列で示される。
【0074】
【数2】
以上の基準ウェハに関するプリアライメント前処理によって、測定レシピ139(図2)内に以下の情報が登録される。
(a)画像回転角度β1;
(b)撮像光学系の回転角度δ;
(c)基準ウェハの回転角度θ1;
(d)テンプレート画像MPaの画像データ;
(e)位置合わせ基準点RPのステージ座標値(XRP,YRP)。
【0076】
上記の情報(a)〜(d)は、撮像座標とステージ座標とウェハ座標との座標変換を規定するための座標変換情報である。すなわち、上述した数式2に示されているように、基準ウェハの回転角度θ1と位置合わせ基準点RPのステージ座標値(XRP,YRP)とは、ウェハ座標とステージ座標の座標変換係数として使用される。また、数式1に示されているように、撮像光学系の回転角度δは、撮像座標とステージ座標の座標変換係数として使用される。これらの座標変換係数を用いることによって、撮像座標とステージ座標とウェハ座標との間の座標変換を任意に行うことが可能である。例えば、撮像画像内の任意の位置の撮像座標値を、ステージ座標値またはウェハ座標値に変換することが可能である。逆に、ウェハ上の任意の位置のウェハ座標値を、ステージ座標値または撮像座標値に変換することも可能である。
【0077】
D.基準ウェハを用いたファインアライメント前処理:
図21は、基準ウェハWF1を用いたファインアライメント前処理の手順を示すフローチャートである。ファインアライメント前処理では、基準ウェハWF1上の複数の測定点PM1〜PM15(図3(A)において白丸で示す)のウェハ座標系の座標値と、各測定点における測定条件とが、以下のようにして登録される。
【0078】
ステップS21では、測定点(例えば図3(A)のPM1)を視野内に含む位置をユーザが指定して、XYステージ36を移動させる。図22は、i番目の測定点PMiを含む視野W(i)を示す説明図である。この視野W(i)は、アフィン変換によって画像回転角度β1だけ回転した後の正立した画像を示しており、また、各位置は、ウェハ座標系の座標値(ξ,η)で示されている。
【0079】
図21のステップS22では、ユーザが図22に示す画面上でi番目の測定点PMiの位置を、マウスなどのポインティングデバイスを用いて指示する。測定点PMiのステージ座標値(ξi,ηi)は、測定レシピ139に保存される。ステップS23では、測定点PMiの近傍において、第2のテンプレート画像MRa(第2のテンプレート画像)として適切な画像パターンをユーザが探す。第2のテンプレート画像MRaとして適切な画像パターンは、90°の整数倍の回転対称性が無い画像パターンであることが好ましい。
【0080】
適切な画像パターンが見いだされると、ステップS24において、その画像パターンが画面の中央になるようにXYステージ36の位置をユーザが調整する。そして、ステップS25において視野内の画像を取り込み、画像回転角度β1だけ画像を回転する。
【0081】
ステップS26では、ユーザが第2のテンプレート画像MRaの領域を指定することによって、第2のテンプレート画像MRaの画像データを切り出し、その基準点Raのウェハ座標値(ξa,ηa)とともに保存する。
【0082】
なお、第2のテンプレート画像MRaは、プリアライメント前処理で用いられた第1のテンプレート画像MPa(図17(C))と同じものであってもよい。例えば、各測定点の近傍に第1のテンプレート画像MPaが存在する場合には、ステップS26の代わりに、パターンマッチング手段154(図2)が、第1のテンプレート画像MPaを用いたパターンマッチング処理を行って基準点Raの位置を決定する。
【0083】
ステップS27では、第2のテンプレート画像MRaの基準点Raから、i番目の測定点PMiまでの座標のオフセット(Δξ,Δη)を求めて測定レシピ139に保存する。測定点PMiの位置は、ユーザによって指定される。この座標のオフセット(Δξ,Δη)は、i番目の測定点PMiの近傍に存在する第2のテンプレート画像MRaと、i番目の測定点PMiとの位置関係を示す情報である。
【0084】
ステップS28では、この測定点PMiにおける測定条件をユーザが設定する。例えばウエハ表面の薄膜の膜厚測定を行う場合には、測定条件としては、測定対象の薄膜の種類(SiO2 ,SiN等)、薄膜の光学定数、膜厚の取りうる範囲等が設定される。なお、測定条件は、測定点毎に設定する必要は無く、例えばすべての測定点について同じ測定条件が適用されるようにしてもよい。
【0085】
ステップS29では、他の測定点があるか否かが判断され、他の測定点がある場合にはステップS21に戻り、上述したステップS21〜S28の処理が繰り返される。一方、全ての測定点に関してステップS21〜S28の処理が終了すると、基準ウェハWF1でのファインアライメント前処理が終了する。
【0086】
なお、第2のテンプレート画像MRaとしては、全ての測定点に対して共通の1つの画像パターンを使用してもよく、あるいは、各測定点に対してそれぞれ異なる画像パターンを登録しても良い。
【0087】
上述した基準ウェハWF1のファインアライメント前処理では、複数の測定点に関して以下の情報を含む測定レシピ139が登録される。
(a)第2のテンプレート画像MRaの画像データ;
(b)各測定点PMiのウェハ座標値(ξi,ηi);
(c)各測定点PMiと、その近傍のマッチング画像の基準点Raとの間の座標のオフセット(Δξ,Δη);
(d)各測定点PMiにおける測定条件。
【0088】
上記の情報(a)〜(c)は、ウェハ座標系において、各測定点PMiの位置を決定するために使用される情報であり、以下では「測定位置情報」と呼ぶ。この測定位置情報を用いることによって、被測定ウェハにおける各測定点の位置を求めることができる。以上のステップT1,T2の処理の結果、座標変換情報と測定位置情報と測定条件とを含む測定レシピ139の登録が終了する。
【0089】
E.被測定ウェハを用いたプリアライメント処理:
被測定ウェハWF2を用いた測定処理においては、測定レシピの登録に用いた第1の測定装置と同じ装置を用いることもでき、あるいは、他の第2の測定装置を用いることもできる。他の第2の測定装置を用いる場合には、測定レシピ139が第1の測定装置から第2の測定装置に転送(コピー)されて利用される。なお、第2の測定装置における座標変換情報は、第1の測定装置における座標変換情報とは異なるので、測定レシピ139の中の測定位置情報と測定条件のみを第2の測定装置に転送すればよい。
【0090】
図23は、被測定ウェハのプリアライメント処理の手順を示すフローチャートである。図23のステップT22,T23の処理は、基準ウェハに関するプリアライメント前処理と同じであり、ウェハの画像回転角度β2を求めるためのステップT21の処理のみが異なる。なお、測定レシピの登録に用いた第1の測定装置をそのまま用いて被測定ウェハWF2の測定処理を行う場合には、撮像光学系の回転角度δは変わらないのでステップT22の処理は省略され、ステップT21とステップT23の処理だけが行われる。一方、測定レシピの登録に用いた第1の測定装置とは異なる第2の測定装置を用いる場合には、ステップT22の処理も実行される。以下では主に、第1の測定装置とは別の第2の測定装置を用いる場合について説明する。
【0091】
図24は、ステップT21の詳細手順を示すフローチャートである。ステップS1〜S6までの処理は、図6に示した基準ウェハに関するプリアライメント前処理の手順と同じである。これによって、ウェハの中心近くのスクライブライン交点の画像が取り込まれる。図25は、被測定ウェハに設定された視野の一例を示している。ここでは、視野Wdを撮像領域とした画像が取込まれる。図24のステップS3においては、図25に示す粗回転角度α2prが検出されている。なお、この粗回転角度α2prは、90°の整数倍の不確定さを有している。被測定ウェハにおいては、不確定さを取除く前の粗回転角度を「予備回転角度」とも呼ぶ。この名前は、不確定さを含む予備的な回転角度であることを意味している。
【0092】
ステップS31では、パターンマッチング手段154(図2)が、この視野Wd内の画像に関して、基準ウェハの前処理において登録された第1のテンプレート画像MPaを用いたパターンマッチング処理を行なう。
【0093】
図26は、被測定ウェハに関するパターンマッチングの方法を示す説明図である。まず、図26(A)に示す読み取られた画像を、アフィン変換によって予備回転角度α2prだけ時計廻りに回転して、図26(B)に示すような画像を作成する。そして、回転後の画像内において、第1のテンプレート画像MPaとマッチングする画像パターンをパターンマッチング処理によって検出する。この時、図26(C)に示すように、90°ずつ回転した4つのテンプレート画像を予め作成しておくことが好ましい。そして、これらの4つのテンプレート画像の中で、マッチング度が最も高くなるテンプレート画像を決定し、これにマッチングした画像パターン(マッチングパターン)の基準点の座標を決定する。図26(B)の例では、180°回転のテンプレート画像のマッチング度が最も高い。従って、この被測定ウェハの画像回転角度β2は、(α2pr+180°)であることが決定される。すなわち、テンプレート画像を用いたパターンマッチングによって、予備回転角度α2prの不確定さを解消して、画像回転角度β2の値を決定することができる。なお、回転対称な4つのテンプレート画像に関連付けられた角度(0°、90°、180°、270°)のうち、パターンマッチングによって選択された角度を、以下では「マッチング角度」と呼ぶ。
【0094】
図27は、被測定ウェハの予備回転角度α2prと画像回転角度β2との関係を示す説明図である。この例では、予備回転角度α2prと画像回転角度β2とは180°の差がある。もちろん、これらの角度α2pr,β2が等しい場合もある。
【0095】
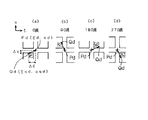
図24のステップS32では、マッチングパターンMPdの基準点Qdのウェハ座標値(ξqd,ηqd)が保存される。ステップS33では、パターンマッチングの結果から、マッチングパターンMPdの近傍にある第1のスクライブライン交点Pd(図27)の座標を求める。図28は、マッチングパターンMPdの基準点Qdと、第1のスクライブライン交点Pdとの関係を示す説明図である。前述したように、パターンマッチング処理では、図28(a)〜(d)に示す4つのマッチング角度のいずれか1つにおいて、画像パターンがマッチングすることが確認される。スクライブライン交点Pdのウェハ座標(ξd,ηd)は、マッチング角度に応じてそれぞれ以下のように算出される。
【0096】
(a)マッチング角度が0度の場合:
ξd=ξqd+Δξ,ηd=ηqd+Δη
【0097】
(b)マッチング角度が90度の場合:
ξd=ξqd+Δη,ηd=ηqd−Δξ
【0098】
(c)マッチング角度が180度の場合:
ξd=ξqd−Δξ,ηd=ηqd−Δη
【0099】
(d)マッチング角度が270度の場合:
ξd=ξqd−Δη,ηd=ηqd+Δξ
【0100】
ここで、Δξ,Δηは、前述した基準ウェハのプリアライメント前処理において求められていた、テンプレート画像MPaの基準点Qa(図17(B))と、その近傍のスクライブライン交点Paとの座標のオフセットである。この座標のオフセット(Δξ,Δη)を用いることによって、マッチングパターンMPdの基準点Qdのウェハ座標値から、スクライブライン交点Pdのウェハ座標値を上記のように算出することができる。
【0101】
こうして被測定ウェハWF2に関するステップT21の処理が終了すると、図23のステップT22,T23において、撮像光学系の回転角度δ、および、ステージ座標とウェハ座標との間の座標変換の係数が決定される。ステップT22,T23の処理手順は、前述した基準ウェハにおけるステップT12,T13と同じなので、ここではその詳細は省略する。
【0102】
F.被測定ウェハを用いたファインアライメント処理:
図29は、被測定ウェハを用いたファインアライメント処理の手順を示すフローチャートである。ステップS41では、プリアライメント処理で得られた情報(プリアライメント情報)を用いて最初の測定点のステージ座標を予測し、測定点の近傍にあるテンプレート画像(マッチング画像)の位置にXYステージ36を移動させる。このとき、まず、まず、測定レシピ139に含まれている各測定点のウェハ座標値が、座標変換手段164によってステージ座標系の座標値に変換される。ところが、座標変換で得られた測定点のステージ座標値は、ステージの歪み等の原因によって、実際の測定点のステージ座標値から多少ずれる可能性がある。そこで、座標変換で得られたステージ座標値は、測定点の位置を予測するために用いられ、測定点の正確な位置は以下に説明するパターンマッチング処理によって決定される。このように、座標変換で得られたステージ座標値は測定点の予測位置を示すので、これを「予測値」と呼ぶ。一方、パターンマッチング処理によって決定される測定点の正確な位置を「実測位置」と呼び、その座標値を「実測値」と呼ぶ。
【0103】
ステップS42では、測定点の予測位置の近傍の画像を取込み、ファインアライメント処理で求めた画像回転角度β2だけ画像を回転する。図30は、回転後の画像を示す説明図である。この画像は、前述した基準ウェハのプリアライメント処理における図22の画像とほぼ同じものである。図30の各点の位置は、ウェハ座標系の座標値で示されている。
【0104】
図29のステップS43では、第2のテンプレート画像MRa(図22)を用いたパターンマッチングを行い、マッチングパターンMRb(図30)が決定される。ステップS44では、マッチングパターンMRbの基準点Rbのウェハ座標値(ξb,ηb)を決定する。ステップS45では、基準点Rbのウェハ座標値(ξb,ηb)を、基準ウェハで求められていた測定点PMiと基準点Raの座標のオフセット(△ξ,△η)で補正することによって、測定点PMiの実測位置を決定する。この測定点PMiの実測位置は、ステージ座標系の座標値に変換される。従って、この測定点PMiの実測位置に従って、測定プローブを測定点PMiに正確に位置決めすることができる。
【0105】
図29のステップS46では、他の測定点があるか否かが判断され、他の測定点がある場合にはステップS41に戻ってステップS41〜S45の処理が繰返される。こうして、被測定ウェハ上の複数の測定点PM1〜PM15(図3)について、ステップS41〜S45を繰返し実行することによって、各測定点の実測位置を正確に決定することができる。各測定点における測定処理(例えば膜厚測定)は、ステップS45とステップS46の間に行うことができる。あるいは、すべての測定点に関してステップS41〜S45を繰返して実行した後に、各測定点における測定処理を順次実行するようにしてもよい。
【0106】
このように、上記実施例では、測定点の位置をウェハ座標系の座標値として測定レシピ139に登録したので、被測定ウェハにおける測定点位置の決定の際に、各測定点のウェハ座標値をステージ座標値に変換することによって、各測定点の位置を決定することができる。上記実施例では、特に、ウェハ座標値からステージ座標値に変換された座標値で示される位置を測定点の予測位置として用い、予測位置近傍でパターンマッチング処理を行ったので、各測定点の実測位置を正確に決定することができる。なお、パターンマッチング処理を行って各測定点PMiの正確な実測位置を決定せずに、各測定点PMiのウェハ座標値を変換して得られたステージ座標値を、実測座標としてそのまま使用することも可能である。但し、上述したようにパターンマッチング処理を実行した方が、より高精度に測定点の位置を決定することができる。
【0107】
なお、この発明は上記の実施例や実施形態に限られるものではなく、その要旨を逸脱しない範囲において種々の態様において実施することが可能であり、例えば次のような変形も可能である。
【0108】
(1)上記実施例において、ハードウェアによって実現されていた構成の一部をソフトウェアに置き換えるようにしてもよく、逆に、ソフトウェアによって実現されていた構成の一部をハードウェアに置き換えるようにしてもよい。
【0109】
(2)位置合わせ基準点RPの座標を決定するための第1のパターンマッチングは、位置合わせ基準点RPの近傍の領域の画像に関して行えばよく、位置合わせ基準点を含む領域の画像に対してパターンマッチングを行う必要はない。同様に、各測定点の座標を決定するための第2のパターンマッチングも、各測定点を含む領域の画像に対してパターンマッチングを行う必要はなく、各測定点の近傍の領域の画像に対して行えばよい。
【0110】
(3)上記実施例では、位置合わせ基準点RPの位置とウェハの回転角度θ1(またはθ2)とを決定する際に、2つの領域においてパターンマッチングを行うようにしていたが、1カ所の領域におけるパターンマッチングによって位置合わせ基準点RPの位置とウェハの回転角度θ1(またはθ2)とを決定するようにしてもよい。あるいは、3カ所以上の領域についてパターンマッチングを行うことによって、位置合わせ基準点RPの位置とウェハの回転角度θ1(またはθ2)とを決定するようにしてもよい。また、各測定点の位置を決定する際に、複数の領域に関してパターンマッチングを行うようにしてもよい。一般に、パターンマッチングを行う領域の数が増加するほど、それによって決定される座標や回転角度の精度が向上する。
【0111】
(4)上記実施例では、装置にウェハの回転機構が備えられていない場合について説明したが、回転機構を有する装置に対しても本発明を適用することが可能である。本発明によれば、回転機能を有する装置においても、ウェハの回転方向(回転角度)を画像処理によって検出することが可能なので、測定点の位置決め処理が簡単であり、また、高速に処理できるという利点がある。
【0112】
(5)測定レシピ139は、各測定点における測定条件を含む必要は無く、少なくとも各測定点の位置を示す情報を含んでいればよい。
【図面の簡単な説明】
【図1】この発明の実施例を適用して半導体ウェハの位置合わせ処理を行なう機能を有する測定装置の構成を示すブロック図。
【図2】画像処理ユニット50の内部構成を示すブロック図。
【図3】実施例における位置合わせ処理の概要を示す説明図。
【図4】実施例における位置合わせ処理の全体手順を示すフローチャート。
【図5】基準ウェハWF1を用いたプリアライメント前処理の手順を示すフローチャート。
【図6】ウェハの画像回転角度β1を求めるためのステップT11の詳細手順を示すフローチャート。
【図7】撮像光学系の回転角度δを求めるためのステップT12の詳細手順を示すフローチャート。
【図8】ウェハ座標とステージ座標との間の座標変換係数を決定するためのステップT13の詳細手順を示すフローチャート。
【図9】半導体ウェハWF内に形成された複数のチップの配列の様子を示す概念図。
【図10】ウェハの中心付近を拡大して示す概念図。
【図11】1次元投影法による直線エッジ情報の検出処理を示す説明図。
【図12】ソベルオペレータによる画像処理の方法を示す説明図。
【図13】ソベルオペレータを用いて得られた水平エッジ値と垂直エッジ値とから、画像の直線部分の角度を算出する方法を示す説明図。
【図14】処理対象となる多階調画像の一例と、この多階調画像からソベルオペレータ法によって検出された角度のヒストグラムを示す説明図。
【図15】4つの等価回転角度を示す説明図。
【図16】スクライブラインSLの交点位置に視野の中心を移動させた状態を示す説明図。
【図17】テンプレート画像MPaの登録の様子を示す説明図。
【図18】撮像座標系とステージ座標系との関係を示す説明図。
【図19】第1と第2のスクライブライン交点位置で撮像された画像の視野Wa,Wbを示す説明図。
【図20】ステップS16,S17の処理内容を示す説明図。
【図21】基準ウェハWF1を用いたファインアライメント前処理の手順を示すフローチャート。
【図22】基準ウェハWF1のファインアライメント前処理におけるi番目の測定点PMiを含む視野W(i)を示す説明図。
【図23】被測定ウェハのプリアライメント処理の手順を示すフローチャート。
【図24】被測定ウェハの画像回転角度β2を求めるためのステップT21の手順を示すフローチャート。
【図25】被測定ウェハにおいて設定される視野の一例を示す説明図。
【図26】被測定ウェハに関するパターンマッチングの方法を示す説明図。
【図27】被測定ウェハにおけるウェハの予備回転角度α2prと画像回転角度β2との関係を示す説明図。
【図28】被測定ウェハにおけるマッチングパターンMPdの基準点Qdと第1のスクライブライン交点Pdとの関係を示す説明図。
【図29】被測定ウェハを用いたファインアライメント処理の手順を示すフローチャート。
【図30】被測定ウェハを用いたファインアライメント処理において、測定点の近傍で得られた回転後の画像を示す説明図。
【符号の説明】
30…制御操作ユニット
31…表示部
32…操作部
33…制御部
34…ステージ駆動部
35…ステージ座標読み込み部
36…XYステージ
36a,36b…ウェハ保持アーム
38…通信経路
40…光学ユニット
41…カメラ
42…光源
43…ハーフミラー
44…対物レンズ
50…画像処理ユニット
110…CPU
112…バスライン
114…ROM
116…RAM
136…モニタ
138…磁気ディスク
139…測定レシピ
140…入出力インタフェイス
150…等価回転方向決定手段
152…撮像位置決定手段
154…パターンマッチング手段
156…角度選択手段
158…回転方向決定手段
160…基準位置決定手段
162…測定位置決定手段
164…座標変換手段
166…測定情報作成手段
Claims (2)
- 被測定ウエハを載置するステージを備えた測定装置を用いて被測定ウェハの測定位置を決定する方法であって、
(a)被測定ウェハ上で定義されたウェハ座標系の座標値で表されている測定点の位置を少なくとも含む測定情報を用い、各測定点のウェハ座標系の座標値を前記ステージ上で定義されたステージ座標系の座標値に変換する工程と、
(b)各測定点に関する前記ステージ座標系の座標値を用いて、前記被測定ウェハ上の各測定点の位置決めを実行する工程と、
を備え、
前記測定情報は、前記被測定ウェハ表面の位置合わせ基準点と前記測定点との位置関係を含むとともに、前記被測定ウェハ表面の前記位置合わせ基準点の近傍の画像に対してパターンマッチングを行う際に用いられる第1のテンプレート画像と、前記測定点の近傍の画像に対してパターンマッチングを行う際に用いられる第2のテンプレート画像と、を含み、
前記工程(b)は、
(i)前記位置合わせ基準点の近傍の領域について第1の画像を取り込む工程と、
(ii)前記第1の画像に関して前記第1のテンプレート画像を用いたパターンマッチング処理を含む第1の処理を行うことによって、前記ステージ座標系における前記被測定ウェハの回転方向と前記位置合わせ基準点の位置とを決定する工程と、
(iii)決定された前記回転方向および前記位置合わせ基準点の位置と、予め登録された前記位置合わせ基準点と前記測定点との位置関係に基づいて、前記ステージ座標系における前記測定点の予測位置を決定する工程と、
(iV)前記予測位置の近傍の領域について第2の画像を取り込む工程と、
(V)前記第2の画像に関して前記第2のテンプレート画像を用いたパターンマッチング処理を含む第2の処理を行うことによって、前記測定点の実測位置を決定する工程と、
を備え、
前記工程(ii)における第1の処理は、
前記第1の画像に含まれる直線部分を分析することによって、前記被測定ウェハが取り得る回転角度として、互いに90度の整数倍異なる4つの等価回転角度を決定する工程と、
前記画像に対して前記第1のテンプレート画像を用いたパターンマッチングを行なうことによってマッチングパターンを検出し、前記マッチングパターンの方向に基づいて前記4つの等価回転角度の中からウェハ座標系において予め定められていた1つの基準方向に対応する1つの等価回転角度を選択する工程と、
前記選択された等価回転角度から前記被測定ウェハの回転方向を決定する工程と、
を含むことを特徴とするウェハの測定位置決定方法。 - 請求項1記載のウェハの測定位置決定方法であって、
前記測定装置は、さらに、前記被測定ウェハ上の画像を撮像するための撮像光学系を備えており、
前記方法は、さらに、
前記撮像光学系で定義された撮像座標系における座標と、前記ステージ座標系における座標との間の回転を含む座標変換を規定する座標変換係数を決定する工程と、
前記座標変換係数を用いて、前記撮像光学系で撮像された撮像画像内における撮像座標系の座標と前記ステージ座標系の座標との間の座標変換を実行する工程と、を含む、ウェハの測定位置決定方法。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP31428697A JP3739550B2 (ja) | 1997-10-29 | 1997-10-29 | ウェハの測定位置決定方法 |
| KR1019980035173A KR100292936B1 (ko) | 1997-10-29 | 1998-08-28 | 웨이퍼의 측정정보 작성방법 및 측정위치 결정방법 |
| US09/177,357 US6363168B1 (en) | 1997-10-29 | 1998-10-23 | Measurement position determination on a semiconductor wafer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP31428697A JP3739550B2 (ja) | 1997-10-29 | 1997-10-29 | ウェハの測定位置決定方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JPH11135601A JPH11135601A (ja) | 1999-05-21 |
| JP3739550B2 true JP3739550B2 (ja) | 2006-01-25 |
Family
ID=18051544
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP31428697A Expired - Fee Related JP3739550B2 (ja) | 1997-10-29 | 1997-10-29 | ウェハの測定位置決定方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US6363168B1 (ja) |
| JP (1) | JP3739550B2 (ja) |
| KR (1) | KR100292936B1 (ja) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7295314B1 (en) * | 1998-07-10 | 2007-11-13 | Nanometrics Incorporated | Metrology/inspection positioning system |
| US6320609B1 (en) * | 1998-07-10 | 2001-11-20 | Nanometrics Incorporated | System using a polar coordinate stage and continuous image rotation to compensate for stage rotation |
| US6956667B2 (en) * | 1999-12-24 | 2005-10-18 | Agfa Gevaert N. V. | Page composing method using stored page elements and apparatus for using the same |
| DE10047211B4 (de) * | 2000-09-23 | 2007-03-22 | Leica Microsystems Semiconductor Gmbh | Verfahren und Vorrichtung zur Positionsbestimmung einer Kante eines Strukturelementes auf einem Substrat |
| JP3661604B2 (ja) * | 2001-04-05 | 2005-06-15 | 松下電器産業株式会社 | 顕微観察装置および顕微観察方法 |
| US7160739B2 (en) | 2001-06-19 | 2007-01-09 | Applied Materials, Inc. | Feedback control of a chemical mechanical polishing device providing manipulation of removal rate profiles |
| IL161627A0 (en) | 2001-11-06 | 2004-09-27 | Tokyo Seimitsu Co Ltd | Wafer observation position designating apparatus, and wafer display position designating method |
| US7519236B2 (en) * | 2003-04-09 | 2009-04-14 | Arcsoft, Inc. | Image retrieval |
| CN101630623B (zh) * | 2003-05-09 | 2012-02-22 | 株式会社荏原制作所 | 基于带电粒子束的检查装置及采用了该检查装置的器件制造方法 |
| KR100514169B1 (ko) * | 2003-07-07 | 2005-09-09 | 삼성전자주식회사 | 웨이퍼의 정렬 방법 및 장치 |
| IL158086A (en) * | 2003-09-24 | 2010-02-17 | Nova Measuring Instr Ltd | Method and system for positioning articles with respect to a processing tool |
| US7349567B2 (en) * | 2004-03-05 | 2008-03-25 | Electro Scientific Industries, Inc. | Method and apparatus for determining angular pose of an object |
| US7813638B2 (en) * | 2004-06-07 | 2010-10-12 | Rudolph Technologies, Inc. | System for generating camera triggers |
| KR100586032B1 (ko) * | 2004-07-26 | 2006-06-01 | 삼성전자주식회사 | 기판 정렬 방법 및 장치, 이를 이용한 기판의 패턴 검사방법 및 장치 |
| KR100790826B1 (ko) * | 2006-06-30 | 2008-01-02 | 삼성전자주식회사 | 오버레이 계측방법 및 그가 사용되는 반도체 제조설비의관리시스템 |
| US20080021665A1 (en) | 2006-07-20 | 2008-01-24 | David Vaughnn | Focusing method and apparatus |
| JP2010135642A (ja) * | 2008-12-05 | 2010-06-17 | Tokyo Electron Ltd | 基板検査方法及び記憶媒体 |
| US8300949B2 (en) * | 2010-05-18 | 2012-10-30 | Sharp Laboratories Of America, Inc. | Edge detection technique having improved feature visibility |
| US9212899B2 (en) | 2010-09-15 | 2015-12-15 | Ascentia Imaging, Inc. | Imaging, fabrication and measurement systems and methods |
| US10132925B2 (en) | 2010-09-15 | 2018-11-20 | Ascentia Imaging, Inc. | Imaging, fabrication and measurement systems and methods |
| JP5782348B2 (ja) * | 2011-09-29 | 2015-09-24 | 株式会社Screenホールディングス | 位置検出装置、描画装置、および、位置検出方法 |
| US9739864B2 (en) | 2012-01-03 | 2017-08-22 | Ascentia Imaging, Inc. | Optical guidance systems and methods using mutually distinct signal-modifying |
| US9534884B2 (en) | 2012-01-03 | 2017-01-03 | Ascentia Imaging, Inc. | Coded localization systems, methods and apparatus |
| US8741511B1 (en) * | 2012-12-19 | 2014-06-03 | Globalfoundries Singapore Pte. Ltd. | Determination of lithography tool process condition |
| JP6134166B2 (ja) * | 2013-03-12 | 2017-05-24 | 株式会社Screenホールディングス | 位置検出装置および位置検出方法 |
| US10126114B2 (en) | 2015-05-21 | 2018-11-13 | Ascentia Imaging, Inc. | Angular localization system, associated repositionable mechanical structure, and associated method |
| CN110992319A (zh) * | 2019-11-21 | 2020-04-10 | 昂纳信息技术(深圳)有限公司 | 一种图像识别方法、贴片方法及系统 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4969199A (en) * | 1986-02-28 | 1990-11-06 | Kabushiki Kaisha Toshiba | Apparatus for inspecting the molded case of an IC device |
| JPH06151274A (ja) * | 1992-11-11 | 1994-05-31 | Hitachi Ltd | 半導体集積回路パターンの位置合わせ方法および装置 |
| KR950030229A (ko) * | 1994-04-20 | 1995-11-24 | 김주용 | 웨이퍼 패턴의 얼라인 방법 |
| US5867590A (en) * | 1995-01-11 | 1999-02-02 | Nova Measuring Instruments, Ltd. | Method and apparatus for determining a location on a surface of an object |
| KR100500199B1 (ko) * | 1995-05-29 | 2005-11-01 | 가부시키가이샤 니콘 | 마스크패턴을겹쳐서노광하는노광방법 |
| US6107637A (en) * | 1997-08-11 | 2000-08-22 | Hitachi, Ltd. | Electron beam exposure or system inspection or measurement apparatus and its method and height detection apparatus |
-
1997
- 1997-10-29 JP JP31428697A patent/JP3739550B2/ja not_active Expired - Fee Related
-
1998
- 1998-08-28 KR KR1019980035173A patent/KR100292936B1/ko not_active IP Right Cessation
- 1998-10-23 US US09/177,357 patent/US6363168B1/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JPH11135601A (ja) | 1999-05-21 |
| KR19990036608A (ko) | 1999-05-25 |
| US6363168B1 (en) | 2002-03-26 |
| KR100292936B1 (ko) | 2001-11-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP3739550B2 (ja) | ウェハの測定位置決定方法 | |
| JP5923824B2 (ja) | 画像処理装置 | |
| CA2507174C (en) | Method of registering and aligning multiple images | |
| CN101996398B (zh) | 用于晶圆对准的图像匹配方法及设备 | |
| TWI413206B (zh) | A center of the wafer detection method and a recording medium on which the method is recorded | |
| JP4446609B2 (ja) | 画像処理方法および装置 | |
| KR20030009166A (ko) | 화상처리방법, 동장치, 및 본딩장치 | |
| JP3545542B2 (ja) | ウェハの回転方向検出方法 | |
| JPH1197512A (ja) | 位置決め装置及び位置決め方法並びに位置決め処理プログラムを記録したコンピュータ読み取り可能な記録媒体 | |
| JP3545558B2 (ja) | ウェハの測定位置決定方法 | |
| JP2011203080A (ja) | 画像処理装置、画像処理方法、画像処理プログラム | |
| JP3725314B2 (ja) | ウェハ上の対象点座標の補正方法および対象点座標の決定方法 | |
| KR100287319B1 (ko) | 피측정 웨이퍼의 회전방향 검출방법과 측정위치 결정방법 및 그 장치 | |
| JP4097255B2 (ja) | パターンマッチング装置、パターンマッチング方法およびプログラム | |
| JP2008124336A (ja) | 半導体チップの外形認識方法および位置補正方法 | |
| JP3632461B2 (ja) | 画像認識方法 | |
| JPH0445047B2 (ja) | ||
| JPH10267621A (ja) | 物体の高さ測定装置及びその方法 | |
| JP2006003276A (ja) | 3次元形状計測システム | |
| US20230249284A1 (en) | Alignment method | |
| JP2005181092A (ja) | 突起の高さ測定方法および測定装置 | |
| JP2000321024A (ja) | 画像認識による位置検出方法 | |
| JP3680578B2 (ja) | 画像認識方法および検査方法 | |
| JP5378340B2 (ja) | ひずみ測定装置およびひずみ測定方法 | |
| JPH11204622A (ja) | 位置合わせ装置及び方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20050125 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20050222 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20050415 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20051025 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20051102 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20091111 Year of fee payment: 4 |
|
| LAPS | Cancellation because of no payment of annual fees |