JP2019022421A - ステッピングモータ駆動装置及びプリンタ装置 - Google Patents
ステッピングモータ駆動装置及びプリンタ装置 Download PDFInfo
- Publication number
- JP2019022421A JP2019022421A JP2017142032A JP2017142032A JP2019022421A JP 2019022421 A JP2019022421 A JP 2019022421A JP 2017142032 A JP2017142032 A JP 2017142032A JP 2017142032 A JP2017142032 A JP 2017142032A JP 2019022421 A JP2019022421 A JP 2019022421A
- Authority
- JP
- Japan
- Prior art keywords
- stepping motor
- electrical angle
- drive means
- power supply
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/24—Arrangements for stopping
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J13/00—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in short lengths, e.g. sheets
- B41J13/0009—Devices or arrangements of selective printing mechanisms, e.g. ink-jet printers or thermal printers, specially adapted for supporting or handling copy material in short lengths, e.g. sheets control of the transport of the copy material
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J29/00—Details of, or accessories for, typewriters or selective printing mechanisms not otherwise provided for
- B41J29/38—Drives, motors, controls or automatic cut-off devices for the entire printing mechanism
- B41J29/393—Devices for controlling or analysing the entire machine ; Controlling or analysing mechanical parameters involving printing of test patterns
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J33/00—Apparatus or arrangements for feeding ink ribbons or like character-size impression-transfer material
- B41J33/14—Ribbon-feed devices or mechanisms
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H20/00—Advancing webs
- B65H20/005—Electrical drive motor control devices therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H20/00—Advancing webs
- B65H20/02—Advancing webs by friction roller
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/04—Arrangements for starting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/04—Arrangements for starting
- H02P8/08—Determining position before starting
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/12—Control or stabilisation of current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/24—Arrangements for stopping
- H02P8/26—Memorising final pulse when stopping
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/24—Arrangements for stopping
- H02P8/28—Disconnecting power source when stopping
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P8/00—Arrangements for controlling dynamo-electric motors of the kind having motors rotating step by step
- H02P8/24—Arrangements for stopping
- H02P8/30—Holding position when stopped
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2203/00—Indexing scheme relating to controlling arrangements characterised by the means for detecting the position of the rotor
- H02P2203/03—Determination of the rotor position, e.g. initial rotor position, during standstill or low speed operation
Abstract
Description
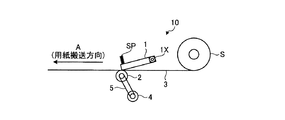
2 プラテンローラ
3 用紙
4 ステッピングモータ
5 ベルト
10 サーマルプリンタ
11 CPU
14 記憶部
18 モータ駆動回路
101 第1切替部
102 第2切替部
103 制御部
Claims (6)
- ステッピングモータと、
前記ステッピングモータの機械角に同期して当該機械角に対応する電気角の単位で電流波形を生成し、当該電流波形を用いて前記ステッピングモータを励磁することで前記ステッピングモータを回転させる駆動手段と、
前記ステッピングモータ及び前記駆動手段への電源供給がオフされる際に、前記駆動手段が保持する電気角の値を記憶部に記憶する記憶制御手段と、
前記ステッピングモータ及び前記駆動手段への電源供給がオンされた際に、前記駆動手段が保持する電気角の値を前記記憶部に記憶された電気角の値まで変位させる位相合わせ手段と、
前記位相合わせ手段が電気角の値を変位させている間、前記ステッピングモータの回転動作を抑制する抑制手段と、
を備えるステッピングモータ駆動装置。 - 前記抑制手段は、前記駆動手段が生成する電流波形の電流値を、前記ステッピングモータが回転しない範囲の値まで低下させることで、前記ステッピングモータの回転動作を抑制する請求項1に記載のステッピングモータ駆動装置。
- 自装置を搭載する本体機からの指示に応じて、前記ステッピングモータ及び前記駆動手段への電源供給をオン又はオフとする電源制御手段を更に備える請求項1又は2に記載のステッピングモータ駆動装置。
- 前記抑制手段は、前記位相合わせ手段が電気角の値を変位させている間、前記電源制御手段に前記ステッピングモータへの電源供給をオフさせることで、前記ステッピングモータの回転動作を抑制する請求項3に記載のステッピングモータ駆動装置。
- 前記位相合わせ手段は、前記記憶部に記憶された電気角の値と前記駆動手段が保持する電気角の値とを比較し、両電気角の値が相違することを条件に、前記駆動手段が保持する電気角の値を前記記憶部に記憶された電気角の値まで変位させる請求項1〜4の何れか一項に記載のステッピングモータ駆動装置。
- 記録媒体が搬送される搬送路上に設けられた搬送ローラと、
前記搬送ローラに対して設けられ、当該搬送ローラに回転駆動力を供給するステッピングモータと、
前記ステッピングモータの機械角に同期して当該機械角に対応する電気角の単位で電流波形を生成し、当該電流波形を用いて前記ステッピングモータを励磁することで前記ステッピングモータを回転させる駆動手段と、
前記搬送路上で搬送される前記記録媒体に対し印字を行う印字手段と、
前記ステッピングモータ及び前記駆動手段への電源供給がオフされる際に、前記駆動手段が保持する電気角の値を記憶部に記憶する記憶制御手段と、
前記ステッピングモータ及び前記駆動手段への電源供給がオンされた際に、前記駆動手段が保持する電気角の値を前記記憶部に記憶された電気角の値まで変位させる位相合わせ手段と、
前記位相合わせ手段が電気角の値を変位させている間、前記ステッピングモータの回転動作を抑制する抑制手段と、
を備えるプリンタ装置。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017142032A JP2019022421A (ja) | 2017-07-21 | 2017-07-21 | ステッピングモータ駆動装置及びプリンタ装置 |
| CN201810594380.4A CN109278427B (zh) | 2017-07-21 | 2018-06-11 | 步进电机驱动装置及打印装置 |
| US16/033,452 US10439532B2 (en) | 2017-07-21 | 2018-07-12 | Driving device, printer device, and method thereof |
| EP18184237.8A EP3432466A1 (en) | 2017-07-21 | 2018-07-18 | Driving device, printer device, and method thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017142032A JP2019022421A (ja) | 2017-07-21 | 2017-07-21 | ステッピングモータ駆動装置及びプリンタ装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2019022421A true JP2019022421A (ja) | 2019-02-07 |
Family
ID=62985982
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017142032A Pending JP2019022421A (ja) | 2017-07-21 | 2017-07-21 | ステッピングモータ駆動装置及びプリンタ装置 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10439532B2 (ja) |
| EP (1) | EP3432466A1 (ja) |
| JP (1) | JP2019022421A (ja) |
| CN (1) | CN109278427B (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112910332B (zh) * | 2021-04-08 | 2022-08-12 | 杭州爱科科技股份有限公司 | 永磁同步电机的初始电角度确定方法、装置及存储介质 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0538198A (ja) * | 1991-07-25 | 1993-02-12 | Oki Data Syst:Kk | パルスモータ制御方法 |
| JP2012055080A (ja) * | 2010-08-31 | 2012-03-15 | Brother Ind Ltd | ステッピングモータ制御装置及び画像読取装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3438612B2 (ja) * | 1998-10-13 | 2003-08-18 | 富士ゼロックス株式会社 | ステッピングモ−タの制御装置 |
| JP3530754B2 (ja) * | 1998-10-26 | 2004-05-24 | キヤノン株式会社 | 記録装置 |
| JP3757745B2 (ja) * | 2000-03-30 | 2006-03-22 | ダイキン工業株式会社 | 予熱電力の制御方法及び予熱発生機構 |
| JP2007306707A (ja) * | 2006-05-11 | 2007-11-22 | Toshiba Corp | ステッピングモータ制御装置、画像形成装置、及びシーケンス制御装置 |
| JP5071780B2 (ja) | 2007-05-25 | 2012-11-14 | 株式会社リコー | ステッピングモータ駆動装置、用紙処理装置、及び画像処理装置 |
| JP2010280146A (ja) * | 2009-06-05 | 2010-12-16 | Sony Corp | 印刷装置 |
| JP5594861B2 (ja) * | 2009-06-23 | 2014-09-24 | ローム株式会社 | モータ駆動装置及びこれを用いた電子機器 |
| CN103192609B (zh) * | 2012-01-10 | 2015-07-29 | 山东新北洋信息技术股份有限公司 | 热敏打印机及热敏打印机的控制方法 |
| JP2014096922A (ja) * | 2012-11-09 | 2014-05-22 | Seiko Epson Corp | ステッピングモーターの制御方法、制御装置およびロボット |
| JP2015019563A (ja) * | 2013-06-10 | 2015-01-29 | 株式会社リコー | 制御装置、駆動装置および画像形成装置 |
| JP6641794B2 (ja) * | 2015-08-28 | 2020-02-05 | 株式会社リコー | モータ駆動装置、モータ制御装置、搬送装置及びモータ駆動方法 |
-
2017
- 2017-07-21 JP JP2017142032A patent/JP2019022421A/ja active Pending
-
2018
- 2018-06-11 CN CN201810594380.4A patent/CN109278427B/zh active Active
- 2018-07-12 US US16/033,452 patent/US10439532B2/en active Active
- 2018-07-18 EP EP18184237.8A patent/EP3432466A1/en not_active Withdrawn
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0538198A (ja) * | 1991-07-25 | 1993-02-12 | Oki Data Syst:Kk | パルスモータ制御方法 |
| JP2012055080A (ja) * | 2010-08-31 | 2012-03-15 | Brother Ind Ltd | ステッピングモータ制御装置及び画像読取装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN109278427A (zh) | 2019-01-29 |
| CN109278427B (zh) | 2021-02-19 |
| EP3432466A1 (en) | 2019-01-23 |
| US10439532B2 (en) | 2019-10-08 |
| US20190028048A1 (en) | 2019-01-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2009297998A (ja) | サーマルプリンタ及びサーマルプリンタの制御方法 | |
| JP2019022421A (ja) | ステッピングモータ駆動装置及びプリンタ装置 | |
| JP2018093599A (ja) | モータ制御装置および画像形成装置 | |
| EP1306222B1 (en) | Printing apparatus and method of controlling the same | |
| JP5193692B2 (ja) | 印刷装置及び印刷装置の制御方法 | |
| JP6892211B2 (ja) | サーマルプリンタ | |
| JP5987124B2 (ja) | モータ制御装置及びプリンタ装置 | |
| JP2015211555A (ja) | モータ駆動装置、モータ制御装置及び画像形成装置 | |
| US20170366124A1 (en) | Stepping motor drive device | |
| JP2021094861A (ja) | サーマルプリンタ、制御方法、及び、プログラム | |
| JP2004062107A5 (ja) | ||
| JP5579806B2 (ja) | 印字装置およびプログラム | |
| JP2008160900A (ja) | ステッピングモータ制御装置および印刷装置 | |
| KR20110002204A (ko) | 모터 제어 장치 및 그 모터 제어 방법 | |
| JP2009297997A (ja) | 印刷装置及び印刷装置の制御方法 | |
| JP2019006004A (ja) | プリンタ及びプリンタシステム | |
| JP2008174347A (ja) | 電子装置及びその制御方法 | |
| JP2002321411A (ja) | 記録装置と記録方法 | |
| JP2019034430A (ja) | プリンタ装置及びプログラム | |
| JP2007068283A (ja) | モータ制御装置、電子機器およびプリンタ装置 | |
| JP2016025769A (ja) | モータ制御装置および印刷装置 | |
| JP2007118536A (ja) | 熱転写式プリンタ及び熱転写式プリンタのモータ制御方法 | |
| JP5648031B2 (ja) | 印字装置および制御プログラム | |
| JP6269419B2 (ja) | 画像形成装置 | |
| JP4799676B2 (ja) | サーマルプリンタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200622 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20210325 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20210914 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20211101 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20220215 |