JP2018195301A - 制御装置及び制御方法 - Google Patents
制御装置及び制御方法 Download PDFInfo
- Publication number
- JP2018195301A JP2018195301A JP2018089894A JP2018089894A JP2018195301A JP 2018195301 A JP2018195301 A JP 2018195301A JP 2018089894 A JP2018089894 A JP 2018089894A JP 2018089894 A JP2018089894 A JP 2018089894A JP 2018195301 A JP2018195301 A JP 2018195301A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- driver
- control device
- image
- distance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000000034 method Methods 0.000 title claims abstract description 70
- 238000003384 imaging method Methods 0.000 claims description 118
- 230000006870 function Effects 0.000 claims description 19
- 238000001514 detection method Methods 0.000 claims description 16
- 230000033001 locomotion Effects 0.000 claims description 14
- 230000036541 health Effects 0.000 claims description 2
- 238000010801 machine learning Methods 0.000 claims description 2
- 230000004397 blinking Effects 0.000 claims 1
- 239000003550 marker Substances 0.000 claims 1
- 230000008569 process Effects 0.000 description 32
- 230000003287 optical effect Effects 0.000 description 17
- 238000012545 processing Methods 0.000 description 17
- 230000008859 change Effects 0.000 description 16
- 230000007423 decrease Effects 0.000 description 13
- 230000005540 biological transmission Effects 0.000 description 9
- 210000001747 pupil Anatomy 0.000 description 8
- 238000012544 monitoring process Methods 0.000 description 7
- 238000011156 evaluation Methods 0.000 description 6
- 230000001133 acceleration Effects 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 5
- 230000035945 sensitivity Effects 0.000 description 5
- 238000005096 rolling process Methods 0.000 description 4
- 230000003044 adaptive effect Effects 0.000 description 3
- 238000004364 calculation method Methods 0.000 description 3
- 206010039203 Road traffic accident Diseases 0.000 description 2
- 238000013459 approach Methods 0.000 description 2
- 239000002131 composite material Substances 0.000 description 2
- 239000000284 extract Substances 0.000 description 2
- 238000010191 image analysis Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 206010041349 Somnolence Diseases 0.000 description 1
- 238000013528 artificial neural network Methods 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000004907 flux Effects 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 238000003703 image analysis method Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 238000012502 risk assessment Methods 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
- 230000001629 suppression Effects 0.000 description 1
- 238000002366 time-of-flight method Methods 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 239000013598 vector Substances 0.000 description 1
Images









Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
- B60W30/16—Control of distance between vehicles, e.g. keeping a distance to preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/08—Active safety systems predicting or avoiding probable or impending collision or attempting to minimise its consequences
- B60W30/09—Taking automatic action to avoid collision, e.g. braking and steering
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
- B60W40/09—Driving style or behaviour
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0055—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot with safety arrangements
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot
- G05D1/0088—Control of position, course or altitude of land, water, air, or space vehicles, e.g. automatic pilot characterized by the autonomous decision making process, e.g. artificial intelligence, predefined behaviours
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
- G08G1/166—Anti-collision systems for active traffic, e.g. moving vehicles, pedestrians, bikes
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W2050/143—Alarm means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2420/00—Indexing codes relating to the type of sensors based on the principle of their operation
- B60W2420/40—Photo or light sensitive means, e.g. infrared sensors
- B60W2420/403—Image sensing, e.g. optical camera
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/30—Driving style
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2552/00—Input parameters relating to infrastructure
- B60W2552/53—Road markings, e.g. lane marker or crosswalk
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/402—Type
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4046—Behavior, e.g. aggressive or erratic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4047—Attentiveness, e.g. distracted by mobile phone
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/802—Longitudinal distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/804—Relative longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2754/00—Output or target parameters relating to objects
- B60W2754/10—Spatial relation or speed relative to objects
- B60W2754/30—Longitudinal distance
Abstract
Description
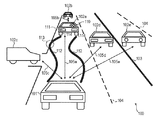
第1実施形態による制御装置及び制御方法について図面を用いて説明する。図1は、車両が道路を走行する様子の例を示す図である。図1に示すように、道路100には、走行車線を画定する白線等の標示が備えられている。例えば、道路100には、車道中央線(センターライン)103、車両通行帯境界線104、車両通行帯最外側線(図示せず)等が示されている。本実施形態による制御装置200(図2参照)が搭載された一台の車両101を自車両とし、それ以外の車両102a〜102eを他車両と称することとする。図1に示すように、車両101や他車両102a〜102eが道路100を走行する。車両101の前方を走行する他車両102aは、先行車両とも称される。先行車両102aの前方を走行する他車両102bは、先々行車両とも称される。符号105aは、車両101から先行車両102aまでの距離(車間距離)を示している。符号105bは、先行車両102aから先々行車両102bまでの距離を示している。符号105cは、車両101から脇道の他車両102cまでの距離を示している。符号105dは、車両101から追い越し車線を走行中の他車両102dまでの距離を示している。符号105eは、車両101から対向車線を走行中の他車両102eまでの距離を示している。なお、他車両一般について説明する際には符号102を用い、個々の他車両について説明する際には符号102a〜102eを用いることとする。また、距離一般や車間距離一般について説明する際には符号105を用い、個々の距離や個々の車間距離について説明する際には符号105a〜105eを用いることとする。他車両102には、初心運転者標識や高齢運転者標識等の標識110が付されている場合もある。また、他車両102には、車名プレート111等が付されている。符号112は、蛇行運転の様子を概念的に示している。符号113は、先行車両102aが車線逸脱した箇所の例を示している。
第2実施形態による制御装置及び制御方法について図面を用いて説明する。図1乃至図5に示す第1実施形態による制御装置及び制御方法と同一の構成要素には、同一の符号を付して説明を省略または簡潔にする。本実施形態においても、図2および図5に示す車両101のいずれも適用可能である。本実施形態の以下の説明では図2に例示する車両101に適用した場合について説明する。
第3実施形態による制御装置及び制御方法について図面を用いて説明する。図7は、本実施形態による制御装置の一例である制御装置700を搭載した車両101を示す概略図である。図1乃至図6に示す第1又は第2実施形態による制御装置及び制御方法と同一の構成要素には、同一の符号を付して説明を省略または簡潔にする。また、本実施形態においても、図2および図5に示す車両101のいずれも適用可能である。すなわち、本実施形態で説明する各動作において、クラウドコンピュータ702が行う処理を制御部202が行い、データベース703が記憶する情報をメモリ206が記憶することで達成できる。
ステップS905の後、ステップS901以降の動作が繰り返される。
本実施形態による制御装置及び制御方法について図面を用いて説明する。図1乃至図9に示す第1乃至第3実施形態による制御装置及び制御方法と同一の構成要素には、同一の符号を付して説明を省略または簡潔にする。
以上、本発明をその好適な実施形態に基づいて詳述してきたが、本発明はこれら特定の実施形態に限られるものではなく、この発明の要旨を逸脱しない範囲の様々な形態も本発明に含まれる。例えば、上記実施形態を適宜組み合わせるようにしてもよい。
Claims (29)
- 車両を制御する制御手段を有する制御装置であって、前記制御手段は、
他車両の運転者の情報を取得し、
前記他車両の運転者の情報に基づいて前記車両の走行を制御するための信号を生成し、出力する
ことを特徴とする制御装置。 - 前記制御手段は、撮像手段によって撮像された前記他車両の画像に基づいて前記他車両の運転者の情報を取得することを特徴とする請求項1に記載の制御装置。
- 前記制御手段は、前記他車両の画像から前記他車両の運転者の年齢を推測することが可能な特定の被写体を検出することで、前記他車両の運転者の情報を取得することを特徴とする請求項2に記載の制御装置。
- 前記制御手段は、前記他車両の画像から前記他車両に付されている運転者を示す特定の標識を検出することで、前記他車両の運転者の情報を取得することを特徴とする請求項2に記載の制御装置。
- 前記制御手段は、前記他車両の運転者の画像から前記他車両の運転者の情報を取得することを特徴とする請求項2乃至4のいずれか1項に記載の制御装置。
- 前記制御手段は、前記他車両の運転者の画像から該運転者の年齢、脈拍、健康状態の少なくとも1つを推測することで前記他車両の運転者の情報を取得することを特徴とする請求項2乃至5のいずれか1項に記載の制御装置。
- 前記制御手段は、前記他車両の運転者の画像から、該運転者の顔の向きや視線、瞬き間隔、動作や姿勢を検出することで前記他車両の運転者の情報を取得することを特徴とする請求項2乃至6のいずれか1項に記載の制御装置。
- 車両を運転する運転者の画像に基づいて、該運転者の情報を出力する学習済プログラムを記憶した判定手段を有し、
前記学習済プログラムは、運転者の顔の向き、視線、動作及び姿勢について様々なパターンを有する画像を機械学習させた結果であり、
前記制御手段は、前記判定手段に前記他車両の運転者の画像を入力することで、前記判定手段から出力される前記他車両の運転者の情報を取得する
ことを特徴とする請求項5乃至7のいずれか1項に記載の制御装置。 - 前記制御手段は、前記他車両あるいはサーバーから発信される前記他車両の運転者の情報を受信することで前記他車両の運転者の情報を取得することを特徴とする請求項1に記載の制御装置。
- 前記制御手段は、前記他車両の運転者の情報に基づき、前記車両に設けられた警告発生手段に警告を通知させることを特徴とする請求項1乃至9のいずれか1項に記載の制御装置。
- 前記制御手段は、前記他車両の車両に関する車両情報を取得し、該車両情報に基づいて前記他車両を制御するための信号を生成することを特徴とする請求項1乃至10のいずれか1項に記載の制御装置。
- 前記制御手段は、前記他車両の画像を取得し、該画像から前記他車両の車名、グレード名及び年式の少なくとも1つを検出することで前記他車両の車両情報を取得することを特徴とする請求項11に記載の制御装置。
- 前記車両を制御するための前記信号は、前記他車両の危険性と、前記車両から前記他車両までの距離と、前記車両の走行速度から見積もられる停止距離とに基づいて生成されることを特徴とする請求項1乃至12のいずれか1項に記載の制御装置。
- 前記他車両の危険性は、前記他車両の蛇行走行又は車線逸脱に基づいて判定されることを特徴とする請求項1乃至13のいずれか1項に記載の制御装置。
- 前記他車両の危険性は、前記他車両の前記蛇行走行の頻度又は前記車線逸脱の頻度に基づいて判定されることを特徴とする請求項14に記載の制御装置。
- 前記他車両の危険性は、複数の前記他車両のうちの第1の他車両と、前記第1の他車両の前方を走行する第2の他車両との車間距離に基づいて判定されることを特徴とする請求項1乃至15のいずれか1項に記載の制御装置。
- 前記他車両の危険性は、前記他車両に備えられた安全装備又は自動運転機能に基づいて判定されることを特徴とする請求項1乃至16のいずれか1項に記載の制御装置。
- 前記他車両に備えられた前記安全装備又は前記自動運転機能は、前記他車両の車名、グレード名及び年式のうちの少なくともいずれか1つに基づいて判定されることを特徴とする請求項17に記載の制御装置。
- 前記他車両の前記車名、前記グレード名又は前記年式は、前記他車両の画像又は前記他車両の画像に含まれる文字に基づいて判定されることを特徴とする請求項18に記載の制御装置。
- 前記他車両の画像に含まれる前記文字を前記他車両の画像のうちから探索する際には、前記他車両のテールライトの上側の領域に対して前記文字の探索を行う第1の探索が行われ、前記第1の探索において前記文字が検出されない場合には、前記他車両の前記テールライトの下側の領域に対して前記文字の探索を行う第2の探索が行われ、前記第2の探索において前記文字が検出されない場合には、左側の前記テールライトと右側の前記テールライトとの間の領域に対して前記文字の探索を行う第3の探索が行われることを特徴とする請求項19に記載の制御装置。
- 前記他車両の前記車名、前記グレード名又は前記年式は、前記車両の外部であるサーバーに設けられたクラウドコンピュータによって判定されることを特徴とする請求項18乃至20のいずれか1項に記載の制御装置。
- 前記車両を制御するための前記信号は、ブレーキ制御信号、動力制御信号、又は、操舵制御信号であることを特徴とする請求項1乃至21のいずれか1項に記載の制御装置。
- 前記車両から前記他車両までの前記距離は、撮像部によって取得される視差画像における視差に基づいて算出されることを特徴とする請求項13に記載の制御装置。
- 前記車両から前記他車両までの前記距離は、前記他車両のサイズの情報と、前記画像に写っている前記他車両のサイズとに基づいて算出されることを特徴とする請求項13に記載の制御装置。
- 前記他車両の危険性又は前記車両を制御するための前記信号は、前記制御部によって判定又は生成されることを特徴とする請求項1乃至24のいずれか1項に記載の制御装置。
- 前記他車両の危険性又は前記車両を制御するための信号は、クラウドコンピュータによって判定又は生成されることを特徴とする請求項1乃至24のいずれか1項に記載の制御装置。
- 前記制御手段は、
車速検出手段で検出される前記車両の車速情報と、
距離検出手段で検出される前記車両の前記他車両までの距離情報と、
に基づいて前記車両を制御するための信号を生成することを特徴とする請求項1乃至26のいずれか1項に記載の制御装置。 - 車両を制御する制御手段による制御方法であって、
他車両の運転者の情報を取得するステップと、
前記他車両の運転者の情報に基づいて前記車両の走行を制御するための信号を生成するステップと、
前記信号を出力するステップと、
を有することを特徴とする制御方法。 - コンピュータに、
他車両の運転者の情報を取得するステップと、
前記他車両の運転者の情報に基づいて車両の走行を制御するための信号を生成するステップと、
前記信号を出力するステップと、
を実行させるためのプログラム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201880032594.0A CN110651313A (zh) | 2017-05-15 | 2018-05-11 | 控制装置和控制方法 |
| PCT/JP2018/018305 WO2018212090A1 (ja) | 2017-05-15 | 2018-05-11 | 制御装置及び制御方法 |
| US16/682,583 US11390276B2 (en) | 2017-05-15 | 2019-11-13 | Control device, control method, and non-transitory storage medium |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017096717 | 2017-05-15 | ||
| JP2017096717 | 2017-05-15 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018195301A true JP2018195301A (ja) | 2018-12-06 |
| JP2018195301A5 JP2018195301A5 (ja) | 2021-07-26 |
Family
ID=64570528
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018089894A Pending JP2018195301A (ja) | 2017-05-15 | 2018-05-08 | 制御装置及び制御方法 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US11390276B2 (ja) |
| JP (1) | JP2018195301A (ja) |
| CN (1) | CN110651313A (ja) |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020095466A (ja) * | 2018-12-12 | 2020-06-18 | アルパイン株式会社 | 電子装置 |
| KR20200096115A (ko) * | 2019-01-31 | 2020-08-11 | 주식회사 스트라드비젼 | V2x 통신 및 이미지 처리를 이용한 정보 융합을 통해 자율 주행의 단기 경로를 플래닝하기 위한 방법 및 장치 |
| CN111524359A (zh) * | 2019-02-01 | 2020-08-11 | 丰田自动车株式会社 | 信息处理装置、信息处理系统、信息处理方法以及程序 |
| JP2020154506A (ja) * | 2019-03-19 | 2020-09-24 | 株式会社Jvcケンウッド | 煽り運転警告装置、及び煽り運転警告プログラム |
| JP2020201753A (ja) * | 2019-06-11 | 2020-12-17 | Necプラットフォームズ株式会社 | 運転支援装置、方法、プログラム及びシステム |
| WO2021002368A1 (ja) * | 2019-07-01 | 2021-01-07 | ソニー株式会社 | 安全性能評価装置、安全性能評価方法、情報処理装置、及び情報処理方法 |
| JP2021015428A (ja) * | 2019-07-11 | 2021-02-12 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP2021034983A (ja) * | 2019-08-28 | 2021-03-01 | Kddi株式会社 | 映像ストリームに影響した外的要因情報を推定するプログラム、サーバ、システム、端末及び方法 |
| EP3786018A1 (en) * | 2019-08-05 | 2021-03-03 | Samsung Electronics Co., Ltd. | Electronic device for vehicle and operating method thereof |
| JP2021103449A (ja) * | 2019-12-25 | 2021-07-15 | トヨタ自動車株式会社 | 情報記録再生装置、情報記録再生プログラムおよび情報記録再生システム |
| FR3106111A1 (fr) * | 2020-01-15 | 2021-07-16 | Psa Automobiles Sa | Procédé et dispositif de contrôle d’un véhicule |
| JP2021131580A (ja) * | 2020-02-18 | 2021-09-09 | 和博 山内 | 自動運転車 |
| WO2021256118A1 (ja) * | 2020-06-19 | 2021-12-23 | 株式会社小松製作所 | 無人車両の制御システム、無人車両、及び無人車両の制御方法 |
| WO2022025086A1 (ja) * | 2020-07-29 | 2022-02-03 | 株式会社Soken | 経路確認装置、経路確認方法および車両制御方法 |
| JP2022050311A (ja) * | 2020-12-21 | 2022-03-30 | ペキン バイドゥ ネットコム サイエンス アンド テクノロジー カンパニー リミテッド | 車両の車線変更を検出するための方法、装置、電子機器、記憶媒体、路側機、クラウド制御プラットフォーム、及びコンピュータプログラム |
| EP3950448A4 (en) * | 2019-03-29 | 2022-04-06 | NISSAN MOTOR Co., Ltd. | VEHICLE CONTROL METHOD AND VEHICLE CONTROL DEVICE |
| JP2022117431A (ja) * | 2021-01-29 | 2022-08-10 | 三菱電機株式会社 | 運転支援情報配信装置、交通システム、車両、車両制御装置およびコンピュータプログラム |
| WO2023021789A1 (ja) * | 2021-08-19 | 2023-02-23 | 住友電気工業株式会社 | 車載装置、交通情報作成装置、通知方法、交通情報作成方法、通知プログラムおよび交通情報作成プログラム |
| WO2023026717A1 (ja) * | 2021-08-27 | 2023-03-02 | 株式会社デンソー | 自動運転制御装置、及び自動運転制御プログラム |
| JP7367031B2 (ja) | 2019-07-22 | 2023-10-23 | バイドゥドットコム タイムズ テクノロジー (ベイジン) カンパニー リミテッド | 自動運転車両におけるセンサ同期性データ分析に用いるシステム |
| JP7434882B2 (ja) | 2019-12-23 | 2024-02-21 | 株式会社Jvcケンウッド | 危険運転判定装置、危険運転判定方法、および危険運転判定プログラム |
Families Citing this family (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108583571A (zh) * | 2018-04-28 | 2018-09-28 | 深圳市商汤科技有限公司 | 碰撞控制方法及装置、电子设备和存储介质 |
| WO2020017716A1 (ko) * | 2018-07-20 | 2020-01-23 | 엘지전자 주식회사 | 차량용 로봇 및 상기 로봇의 제어 방법 |
| JP6900942B2 (ja) * | 2018-09-26 | 2021-07-14 | 株式会社デンソー | ドライブレコーダ及び画像記憶システム |
| JP7251120B2 (ja) * | 2018-11-29 | 2023-04-04 | トヨタ自動車株式会社 | 情報提供システム、サーバ、車載装置、プログラム及び情報提供方法 |
| JP7192443B2 (ja) * | 2018-11-29 | 2022-12-20 | トヨタ自動車株式会社 | 情報提供システム、サーバ、車載装置、車両、プログラム及び情報提供方法 |
| JP7232094B2 (ja) * | 2019-03-25 | 2023-03-02 | 株式会社Subaru | 車両の制御装置、車両の制御方法及びプログラム |
| US11620522B2 (en) * | 2019-12-31 | 2023-04-04 | Magna Electronics Inc. | Vehicular system for testing performance of headlamp detection systems |
| JP7431081B2 (ja) * | 2020-03-27 | 2024-02-14 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| US11623639B2 (en) * | 2020-07-15 | 2023-04-11 | Charter Communications Operating, Llc | Video analytics traffic monitoring and control |
| CN111950490B (zh) * | 2020-08-18 | 2024-04-09 | 东软睿驰汽车技术(沈阳)有限公司 | 停车杆的识别方法及其识别模型的训练方法、装置 |
| US11390285B2 (en) * | 2020-09-30 | 2022-07-19 | GM Global Technology Operations LLC | Automated lane change system with steering wheel activation for a motor vehicle |
| FR3114788B1 (fr) * | 2020-10-07 | 2022-08-19 | Psa Automobiles Sa | Procédé et dispositif de détermination d’un indicateur de comportement latéral dangereux d’un véhicule autonome circulant sur une voie de circulation |
| CN112382055A (zh) * | 2020-10-26 | 2021-02-19 | 北京国睿信安科技有限公司 | 一种应用各种水域区的防溺水系统 |
| DE102020132431A1 (de) * | 2020-12-07 | 2022-06-09 | Valeo Schalter Und Sensoren Gmbh | Bestimmung eines Unaufmerksamkeitszustandes eines Fahrers eines Zielfahrzeugs in einer Umgebung eines Ego-Fahrzeugs |
| US20220028270A1 (en) * | 2021-07-14 | 2022-01-27 | Subaru Corporation | Vehicle detection information sharing system |
| CN113682301A (zh) * | 2021-10-25 | 2021-11-23 | 江苏日盈电子股份有限公司 | 用于主动避让危险车辆的方法和系统以及车辆 |
| US20230138981A1 (en) * | 2021-10-29 | 2023-05-04 | Tusimple, Inc. | Autonomous Vehicle Navigation in Response to an Oncoming Train on a Railroad Track |
| DE102022200674A1 (de) * | 2022-01-21 | 2023-07-27 | Robert Bosch Gesellschaft mit beschränkter Haftung | Verfahren zum Betreiben eines Fahrzeugs |
Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05238367A (ja) * | 1992-02-28 | 1993-09-17 | Mazda Motor Corp | 車両の安全装置 |
| JPH07146137A (ja) * | 1993-11-22 | 1995-06-06 | Matsushita Electric Ind Co Ltd | 車間距離計測装置 |
| JPH09311996A (ja) * | 1996-05-23 | 1997-12-02 | Matsushita Electric Ind Co Ltd | カー・ナビゲーション装置 |
| JP2002046506A (ja) * | 2000-04-24 | 2002-02-12 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2006176069A (ja) * | 2004-12-24 | 2006-07-06 | Aisin Seiki Co Ltd | インターチェンジ合流支援装置 |
| JP2006344154A (ja) * | 2005-06-10 | 2006-12-21 | Sumitomo Electric Ind Ltd | 車両判別装置及び方法 |
| JP2008252494A (ja) * | 2007-03-30 | 2008-10-16 | Fujifilm Corp | アルバム作成のための撮影システム、ならびに撮影支援装置、方法、およびプログラム、ならびにアルバム作成システム、方法、およびプログラム |
| JP2010146428A (ja) * | 2008-12-22 | 2010-07-01 | Nec Corp | 追従対象車検索システム、追従対象車検索方法および追従対象車検索用プログラム |
| JP2013206183A (ja) * | 2012-03-28 | 2013-10-07 | Fujitsu Ltd | 事故予防装置、事故予防方法およびプログラム |
| JP2015014845A (ja) * | 2013-07-03 | 2015-01-22 | エイディシーテクノロジー株式会社 | 通信装置 |
| WO2015008419A1 (ja) * | 2013-07-19 | 2015-01-22 | 日産自動車株式会社 | 運転状態推定装置 |
| JP2015102893A (ja) * | 2013-11-21 | 2015-06-04 | 日産自動車株式会社 | 合流支援システム |
| WO2015122406A1 (ja) * | 2014-02-13 | 2015-08-20 | 三菱電機株式会社 | 通信装置、運転支援装置、および、運転支援システム |
| JP2016139181A (ja) * | 2015-01-26 | 2016-08-04 | 三菱自動車工業株式会社 | 運転支援装置 |
| WO2016170785A1 (ja) * | 2015-04-21 | 2016-10-27 | パナソニックIpマネジメント株式会社 | 情報処理システム、情報処理方法、およびプログラム |
| JP2017004397A (ja) * | 2015-06-15 | 2017-01-05 | パナソニック株式会社 | 歩行者端末装置及び車載端末装置、歩車間通信システム、歩行者端末送信方法 |
| JP2017030748A (ja) * | 2016-11-02 | 2017-02-09 | 株式会社デンソー | 運転支援装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01318200A (ja) * | 1988-06-20 | 1989-12-22 | Clarion Co Ltd | 車外情報検出装置 |
| JP2007210403A (ja) * | 2006-02-08 | 2007-08-23 | Toyota Motor Corp | 車両用運転補助装置 |
| JP2008037218A (ja) * | 2006-08-03 | 2008-02-21 | Aisin Aw Co Ltd | 車両制御装置 |
| JP4895126B2 (ja) | 2007-08-31 | 2012-03-14 | アイシン・エィ・ダブリュ株式会社 | 画像認識装置及びナビゲーション装置 |
| JP2010097443A (ja) * | 2008-10-17 | 2010-04-30 | Sanyo Electric Co Ltd | 車車間通信装置 |
| CN101746269B (zh) * | 2010-01-08 | 2013-04-03 | 东南大学 | 基于软计算的疲劳驾驶融合检测方法 |
| SE537958C2 (sv) * | 2012-09-24 | 2015-12-08 | Scania Cv Ab | Förfarande, mätanordning och styrenhet för anpassning av fordonstågsstyrning |
| JP5711721B2 (ja) * | 2012-12-03 | 2015-05-07 | 富士重工業株式会社 | 車両の運転支援制御装置 |
| JP5809653B2 (ja) * | 2013-02-28 | 2015-11-11 | 富士フイルム株式会社 | 車間距離算出装置およびその動作制御方法 |
| EP3683623B1 (en) * | 2014-06-23 | 2021-09-29 | Honda Motor Co., Ltd. | System and method for responding to driver state |
| KR102316654B1 (ko) * | 2014-11-04 | 2021-10-26 | 현대모비스 주식회사 | 운전 안내 장치 및 그 제어 방법 |
| JP2016151913A (ja) | 2015-02-18 | 2016-08-22 | 三菱自動車工業株式会社 | 運転支援装置 |
| DE102015207902A1 (de) * | 2015-04-29 | 2016-11-03 | Mando Corporation | Verfahren und Vorrichtung zur Bestätigung des relevanten inneren weißen Kreises bei der Erkennung des Umfelds eines kreisförmigen Verkehrszeichens |
| CN105046255A (zh) * | 2015-07-16 | 2015-11-11 | 北京交通大学 | 一种基于车尾文字识别的车型鉴定方法及系统 |
| KR101730321B1 (ko) * | 2015-08-03 | 2017-04-27 | 엘지전자 주식회사 | 운전자 보조 장치 및 그 제어방법 |
| US10384678B1 (en) * | 2016-01-22 | 2019-08-20 | State Farm Mutual Automobile Insurance Company | Autonomous vehicle action communications |
| JP6730615B2 (ja) * | 2016-07-12 | 2020-07-29 | 株式会社Jvcケンウッド | 車両用表示制御装置、車両用表示システム、車両用表示制御方法およびプログラム |
| US10241511B2 (en) * | 2016-11-03 | 2019-03-26 | Ford Global Technologies, Llc | Emergency evacuation using autonomous driving |
| CN106530831A (zh) * | 2016-12-15 | 2017-03-22 | 江苏大学 | 一种高威胁车辆监测预警系统及方法 |
-
2018
- 2018-05-08 JP JP2018089894A patent/JP2018195301A/ja active Pending
- 2018-05-11 CN CN201880032594.0A patent/CN110651313A/zh active Pending
-
2019
- 2019-11-13 US US16/682,583 patent/US11390276B2/en active Active
Patent Citations (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05238367A (ja) * | 1992-02-28 | 1993-09-17 | Mazda Motor Corp | 車両の安全装置 |
| JPH07146137A (ja) * | 1993-11-22 | 1995-06-06 | Matsushita Electric Ind Co Ltd | 車間距離計測装置 |
| JPH09311996A (ja) * | 1996-05-23 | 1997-12-02 | Matsushita Electric Ind Co Ltd | カー・ナビゲーション装置 |
| JP2002046506A (ja) * | 2000-04-24 | 2002-02-12 | Matsushita Electric Ind Co Ltd | ナビゲーション装置 |
| JP2006176069A (ja) * | 2004-12-24 | 2006-07-06 | Aisin Seiki Co Ltd | インターチェンジ合流支援装置 |
| JP2006344154A (ja) * | 2005-06-10 | 2006-12-21 | Sumitomo Electric Ind Ltd | 車両判別装置及び方法 |
| JP2008252494A (ja) * | 2007-03-30 | 2008-10-16 | Fujifilm Corp | アルバム作成のための撮影システム、ならびに撮影支援装置、方法、およびプログラム、ならびにアルバム作成システム、方法、およびプログラム |
| JP2010146428A (ja) * | 2008-12-22 | 2010-07-01 | Nec Corp | 追従対象車検索システム、追従対象車検索方法および追従対象車検索用プログラム |
| JP2013206183A (ja) * | 2012-03-28 | 2013-10-07 | Fujitsu Ltd | 事故予防装置、事故予防方法およびプログラム |
| JP2015014845A (ja) * | 2013-07-03 | 2015-01-22 | エイディシーテクノロジー株式会社 | 通信装置 |
| WO2015008419A1 (ja) * | 2013-07-19 | 2015-01-22 | 日産自動車株式会社 | 運転状態推定装置 |
| JP2015102893A (ja) * | 2013-11-21 | 2015-06-04 | 日産自動車株式会社 | 合流支援システム |
| WO2015122406A1 (ja) * | 2014-02-13 | 2015-08-20 | 三菱電機株式会社 | 通信装置、運転支援装置、および、運転支援システム |
| JP2016139181A (ja) * | 2015-01-26 | 2016-08-04 | 三菱自動車工業株式会社 | 運転支援装置 |
| WO2016170785A1 (ja) * | 2015-04-21 | 2016-10-27 | パナソニックIpマネジメント株式会社 | 情報処理システム、情報処理方法、およびプログラム |
| JP2017004397A (ja) * | 2015-06-15 | 2017-01-05 | パナソニック株式会社 | 歩行者端末装置及び車載端末装置、歩車間通信システム、歩行者端末送信方法 |
| JP2017030748A (ja) * | 2016-11-02 | 2017-02-09 | 株式会社デンソー | 運転支援装置 |
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020095466A (ja) * | 2018-12-12 | 2020-06-18 | アルパイン株式会社 | 電子装置 |
| JP7136538B2 (ja) | 2018-12-12 | 2022-09-13 | アルパイン株式会社 | 電子装置 |
| KR20200096115A (ko) * | 2019-01-31 | 2020-08-11 | 주식회사 스트라드비젼 | V2x 통신 및 이미지 처리를 이용한 정보 융합을 통해 자율 주행의 단기 경로를 플래닝하기 위한 방법 및 장치 |
| KR102306939B1 (ko) * | 2019-01-31 | 2021-10-05 | 주식회사 스트라드비젼 | V2x 통신 및 이미지 처리를 이용한 정보 융합을 통해 자율 주행의 단기 경로를 플래닝하기 위한 방법 및 장치 |
| CN111524359A (zh) * | 2019-02-01 | 2020-08-11 | 丰田自动车株式会社 | 信息处理装置、信息处理系统、信息处理方法以及程序 |
| JP2020154506A (ja) * | 2019-03-19 | 2020-09-24 | 株式会社Jvcケンウッド | 煽り運転警告装置、及び煽り運転警告プログラム |
| EP3950448A4 (en) * | 2019-03-29 | 2022-04-06 | NISSAN MOTOR Co., Ltd. | VEHICLE CONTROL METHOD AND VEHICLE CONTROL DEVICE |
| JP2020201753A (ja) * | 2019-06-11 | 2020-12-17 | Necプラットフォームズ株式会社 | 運転支援装置、方法、プログラム及びシステム |
| JP7044382B2 (ja) | 2019-06-11 | 2022-03-30 | Necプラットフォームズ株式会社 | 運転支援装置、方法、プログラム及びシステム |
| WO2021002368A1 (ja) * | 2019-07-01 | 2021-01-07 | ソニー株式会社 | 安全性能評価装置、安全性能評価方法、情報処理装置、及び情報処理方法 |
| CN114041176A (zh) * | 2019-07-01 | 2022-02-11 | 索尼集团公司 | 安全性能评价装置、安全性能评价方法、信息处理装置和信息处理方法 |
| US11572052B2 (en) | 2019-07-11 | 2023-02-07 | Honda Motor Co., Ltd. | Vehicle control for facilitating control of a vehicle passing a prececeding vehicle |
| JP2021015428A (ja) * | 2019-07-11 | 2021-02-12 | 本田技研工業株式会社 | 車両制御装置、車両制御方法、およびプログラム |
| JP7367031B2 (ja) | 2019-07-22 | 2023-10-23 | バイドゥドットコム タイムズ テクノロジー (ベイジン) カンパニー リミテッド | 自動運転車両におけるセンサ同期性データ分析に用いるシステム |
| EP3786018A1 (en) * | 2019-08-05 | 2021-03-03 | Samsung Electronics Co., Ltd. | Electronic device for vehicle and operating method thereof |
| US11807231B2 (en) | 2019-08-05 | 2023-11-07 | Samsung Electronics Co., Ltd. | Electronic device for vehicle and operating method thereof |
| JP2021034983A (ja) * | 2019-08-28 | 2021-03-01 | Kddi株式会社 | 映像ストリームに影響した外的要因情報を推定するプログラム、サーバ、システム、端末及び方法 |
| JP7269134B2 (ja) | 2019-08-28 | 2023-05-08 | Kddi株式会社 | 映像ストリームに影響した外的要因情報を推定するプログラム、サーバ、システム、端末及び方法 |
| JP7434882B2 (ja) | 2019-12-23 | 2024-02-21 | 株式会社Jvcケンウッド | 危険運転判定装置、危険運転判定方法、および危険運転判定プログラム |
| JP2021103449A (ja) * | 2019-12-25 | 2021-07-15 | トヨタ自動車株式会社 | 情報記録再生装置、情報記録再生プログラムおよび情報記録再生システム |
| JP7243616B2 (ja) | 2019-12-25 | 2023-03-22 | トヨタ自動車株式会社 | 情報記録再生装置、情報記録再生プログラムおよび情報記録再生システム |
| FR3106111A1 (fr) * | 2020-01-15 | 2021-07-16 | Psa Automobiles Sa | Procédé et dispositif de contrôle d’un véhicule |
| WO2021144509A1 (fr) * | 2020-01-15 | 2021-07-22 | Psa Automobiles Sa | Procédé et dispositif de contrôle d'un véhicule |
| JP2021131580A (ja) * | 2020-02-18 | 2021-09-09 | 和博 山内 | 自動運転車 |
| WO2021256118A1 (ja) * | 2020-06-19 | 2021-12-23 | 株式会社小松製作所 | 無人車両の制御システム、無人車両、及び無人車両の制御方法 |
| WO2022025086A1 (ja) * | 2020-07-29 | 2022-02-03 | 株式会社Soken | 経路確認装置、経路確認方法および車両制御方法 |
| JP2022050311A (ja) * | 2020-12-21 | 2022-03-30 | ペキン バイドゥ ネットコム サイエンス アンド テクノロジー カンパニー リミテッド | 車両の車線変更を検出するための方法、装置、電子機器、記憶媒体、路側機、クラウド制御プラットフォーム、及びコンピュータプログラム |
| JP2022117431A (ja) * | 2021-01-29 | 2022-08-10 | 三菱電機株式会社 | 運転支援情報配信装置、交通システム、車両、車両制御装置およびコンピュータプログラム |
| JP7275238B2 (ja) | 2021-01-29 | 2023-05-17 | 三菱電機株式会社 | 運転支援情報配信装置、交通システム、車両、車両制御装置およびコンピュータプログラム |
| WO2023021789A1 (ja) * | 2021-08-19 | 2023-02-23 | 住友電気工業株式会社 | 車載装置、交通情報作成装置、通知方法、交通情報作成方法、通知プログラムおよび交通情報作成プログラム |
| WO2023026717A1 (ja) * | 2021-08-27 | 2023-03-02 | 株式会社デンソー | 自動運転制御装置、及び自動運転制御プログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20200079368A1 (en) | 2020-03-12 |
| CN110651313A (zh) | 2020-01-03 |
| US11390276B2 (en) | 2022-07-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2018195301A (ja) | 制御装置及び制御方法 | |
| KR101996419B1 (ko) | 센서 융합 기반 보행자 탐지 및 보행자 충돌 방지 장치 및 방법 | |
| US9965957B2 (en) | Driving support apparatus and driving support method | |
| US9524643B2 (en) | Orientation sensitive traffic collision warning system | |
| JP4775391B2 (ja) | 障害物検出装置 | |
| JP6950346B2 (ja) | 運転者状態把握装置、運転者状態把握システム、及び運転者状態把握方法 | |
| CN108263279A (zh) | 基于传感器整合的行人检测和行人碰撞避免装置及方法 | |
| JP5966640B2 (ja) | 漫然運転検出装置及びプログラム | |
| EP2759999A1 (en) | Apparatus for monitoring surroundings of vehicle | |
| CN102203837A (zh) | 车辆周围监测装置 | |
| KR20110067359A (ko) | 차량 충돌 방지 장치 및 방법 | |
| CN111354182A (zh) | 一种辅助驾驶方法和系统 | |
| CN109841088A (zh) | 车辆驾驶辅助系统及方法 | |
| KR20190049221A (ko) | 자율주행 차량의 보행자 인식 방법 | |
| JP2006338594A (ja) | 歩行者認識装置 | |
| JPWO2019106787A1 (ja) | 車両制御装置、それを有する車両、および制御方法 | |
| KR20150096924A (ko) | 전방 충돌 차량 선정 방법 및 시스템 | |
| WO2018212090A1 (ja) | 制御装置及び制御方法 | |
| JP2010108180A (ja) | 運転意思推定装置 | |
| JP2009154775A (ja) | 注意喚起装置 | |
| CN109823344B (zh) | 驾驶提示方法与系统 | |
| KR102310433B1 (ko) | 보행자를 감지하여 운전자에게 경고하는 시스템 및 방법 | |
| JP5018571B2 (ja) | 減速指示装置及び減速指示方法 | |
| JP2012103849A (ja) | 情報提供装置 | |
| JP5688396B2 (ja) | 物体認識装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20210507 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20210507 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20220630 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20220726 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20230131 |