JP2018074723A - 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター - Google Patents
駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター Download PDFInfo
- Publication number
- JP2018074723A JP2018074723A JP2016211052A JP2016211052A JP2018074723A JP 2018074723 A JP2018074723 A JP 2018074723A JP 2016211052 A JP2016211052 A JP 2016211052A JP 2016211052 A JP2016211052 A JP 2016211052A JP 2018074723 A JP2018074723 A JP 2018074723A
- Authority
- JP
- Japan
- Prior art keywords
- vibration
- vibration mode
- rotor
- vibrating
- drive device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
- 230000005540 biological transmission Effects 0.000 claims description 76
- 239000000758 substrate Substances 0.000 description 20
- 238000000034 method Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 11
- 239000000463 material Substances 0.000 description 5
- 239000000919 ceramic Substances 0.000 description 4
- 239000010949 copper Substances 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 239000010936 titanium Substances 0.000 description 4
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 3
- 239000000956 alloy Substances 0.000 description 3
- 229910045601 alloy Inorganic materials 0.000 description 3
- 239000000470 constituent Substances 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 3
- 238000011144 upstream manufacturing Methods 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 2
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 2
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052454 barium strontium titanate Inorganic materials 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 239000013078 crystal Substances 0.000 description 2
- 239000012636 effector Substances 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- 229910052719 titanium Inorganic materials 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- VNSWULZVUKFJHK-UHFFFAOYSA-N [Sr].[Bi] Chemical compound [Sr].[Bi] VNSWULZVUKFJHK-UHFFFAOYSA-N 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000013590 bulk material Substances 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 238000007599 discharging Methods 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 229910000765 intermetallic Inorganic materials 0.000 description 1
- 229910052741 iridium Inorganic materials 0.000 description 1
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical compound [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 1
- UKDIAJWKFXFVFG-UHFFFAOYSA-N potassium;oxido(dioxo)niobium Chemical compound [K+].[O-][Nb](=O)=O UKDIAJWKFXFVFG-UHFFFAOYSA-N 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052706 scandium Inorganic materials 0.000 description 1
- SIXSYDAISGFNSX-UHFFFAOYSA-N scandium atom Chemical compound [Sc] SIXSYDAISGFNSX-UHFFFAOYSA-N 0.000 description 1
- XMVONEAAOPAGAO-UHFFFAOYSA-N sodium tungstate Chemical compound [Na+].[Na+].[O-][W]([O-])(=O)=O XMVONEAAOPAGAO-UHFFFAOYSA-N 0.000 description 1
- 238000003980 solgel method Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 235000012431 wafers Nutrition 0.000 description 1
- 239000011787 zinc oxide Substances 0.000 description 1
Images










Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/002—Driving devices, e.g. vibrators using only longitudinal or radial modes
- H02N2/0025—Driving devices, e.g. vibrators using only longitudinal or radial modes using combined longitudinal modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/101—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using intermittent driving, e.g. step motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
- H02N2/142—Small signal circuits; Means for controlling position or derived quantities, e.g. speed, torque, starting, stopping, reversing
Abstract
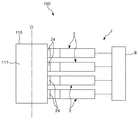
【解決手段】駆動装置は、振動を被駆動部に伝達する伝達部を有している複数の振動体と、少なくとも2つの前記振動体の、前記伝達部の振動軌跡をそれぞれ独立して変化させる制御部と、を有する。また、前記被駆動部と前記振動体とが並ぶ方向を第1方向とし、前記第1方向に直交する方向を第2方向としたとき、少なくとも2つの前記振動体は、それぞれ、前記伝達部の、前記第1方向および前記第2方向の少なくとも一方の振幅が異なる複数の振動モードを有し、前記制御部は、少なくとも2つの前記振動体を、それぞれ、前記複数の振動モードのうちのいずれかの振動モードで駆動させる。
【選択図】図1
Description
少なくとも2つの前記振動体の、前記伝達部の振動軌跡をそれぞれ独立して変化させる制御部と、を有することを特徴とする。
このような構成の駆動装置によれば、複数の振動体の伝達部の振動軌跡をそれぞれ独立して制御(例えば、全ての振動体の伝達部の振動軌跡を同じにしたり、ある振動体の伝達部の振動軌跡を他の振動体の伝達部の振動軌跡と異ならせたり)することで、被駆動部の駆動を高精度に制御することができ、被駆動部を所望の条件で安定して駆動させることができる。したがって、優れた駆動特性を有する駆動装置となる。
これにより、被駆動部の駆動をより高精度に制御することができる。
前記2つの振動体は、前記第1方向および前記第2方向の少なくとも一方の振幅が異なる複数の振動モードを有し、
前記制御部は、前記2つの振動体を、前記複数の振動モードのうちのいずれかの振動モードで駆動させることが好ましい。
このように、振動体が複数の振動モードを有していれば、複数の振動モードの中から1つの振動モードを選択することで、簡単に、伝達部の振動軌跡を変化させることができる。そのため、制御部での制御が簡単となる。
これにより、被駆動部をより確実に、かつスムーズに回転させることができる。さらには、振動体の構成が簡単となる。
これにより、被駆動部をより確実に、かつスムーズに回転させることができる。さらには、振動体の構成が簡単となる。
これにより、被駆動部の駆動をより高精度に制御することができ、より優れた駆動特性を発揮することができる。
これにより、被駆動部の駆動をより高精度に制御することができ、より優れた駆動特性を発揮することができる。
これにより、簡単な構成で振動体を振動させることができる。また、振動体の小型化を図ることもできる。
これにより、振動体の駆動力がより大きくなる。
これにより、本発明の駆動装置の効果を享受でき、優れた駆動特性を有する圧電モーターが得られる。
これにより、本発明の駆動装置の効果を享受でき、高い信頼性を有するロボットが得られる。
これにより、本発明の駆動装置の効果を享受でき、高い信頼性を有する電子部品搬送装置が得られる。
これにより、本発明の駆動装置の効果を享受でき、高い信頼性を有するプリンターが得られる。
まず、本発明の第1実施形態に係る圧電モーターについて説明する。
次に、本発明の第2実施形態に係る圧電モーターについて説明する。
次に、本発明の第3実施形態に係る圧電モーターについて説明する。
次に、本発明の第4実施形態に係る圧電モーターについて説明する。
図13は、本発明の第4実施形態に係る圧電モーターが有する振動体の斜視図である。
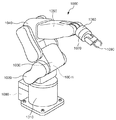
次に、本発明の第5実施形態に係るロボットについて説明する。
図14に示すロボット1000は、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うことができる。ロボット1000は、6軸ロボットであり、床や天井に固定されるベース1010と、ベース1010に回動自在に連結されたアーム1020と、アーム1020に回動自在に連結されたアーム1030と、アーム1030に回動自在に連結されたアーム1040と、アーム1040に回動自在に連結されたアーム1050と、アーム1050に回動自在に連結されたアーム1060と、アーム1060に回動自在に連結されたアーム1070と、これらアーム1020、1030、1040、1050、1060、1070の駆動を制御するロボット制御部1080と、を有している。また、アーム1070にはハンド接続部が設けられており、ハンド接続部にはロボット1000に実行させる作業に応じたエンドエフェクター1090が装着される。また、各関節部のうちの全部または一部には圧電モーター100(駆動装置1)が搭載されており、この圧電モーター100の駆動によって各アーム1020、1030、1040、1050、1060、1070が回動する。なお、各圧電モーター100の駆動は、ロボット制御部1080によって制御される。
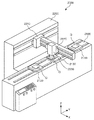
次に、本発明の第6実施形態に係る電子部品搬送装置について説明する。
次に、本発明の第7実施形態に係るプリンターについて説明する。
図17に示すプリンター3000は、装置本体3010と、装置本体3010の内部に設けられている印刷機構3020、給紙機構3030および制御部3040と、を備えている。
Claims (13)
- 振動を被駆動部に伝達する伝達部を有している複数の振動体と、
少なくとも2つの前記振動体の、前記伝達部の振動軌跡をそれぞれ独立して変化させる制御部と、を有することを特徴とする駆動装置。 - 前記2つの振動体の前記伝達部の振動軌跡が、それぞれ異なる請求項1に記載の駆動装置。
- 前記被駆動部と前記振動体とが並ぶ方向を第1方向とし、前記第1方向に直交する方向を第2方向としたとき、
前記2つの振動体は、前記第1方向および前記第2方向の少なくとも一方の振幅が異なる複数の振動モードを有し、
前記制御部は、前記2つの振動体を、前記複数の振動モードのうちのいずれかの振動モードで駆動させる請求項1または2に記載の駆動装置。 - 前記複数の振動モードには、前記伝達部において前記第1方向と前記第2方向に振幅を有する第1振動モードと、前記伝達部において前記第1振動モードよりも前記第2方向の振幅が小さい第2振動モードと、が含まれている請求項3に記載の駆動装置。
- 前記複数の振動モードには、前記伝達部において前記第1方向と前記第2方向に振幅を有する第1振動モードと、前記伝達部において前記第1振動モードよりも前記第1方向の振幅が小さい第3振動モードと、が含まれている請求項3に記載の駆動装置。
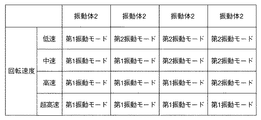
- 前記制御部は、前記被駆動部の駆動速度に応じて、前記伝達部が前記第1振動モードで振動する前記振動体の数を変化させる請求項4または5に記載の駆動装置。
- 前記制御部は、前記被駆動部の駆動速度が大きくなった場合に、前記伝達部が前記第1振動モードで振動する前記振動体の数を増加させる請求項6に記載の駆動装置。
- 前記振動体は、圧電体を有している請求項1ないし7のいずれか1項に記載の駆動装置。
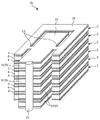
- 前記振動体は、積層されている複数の前記圧電体を有している請求項8に記載の駆動装置。
- 請求項1ないし9のいずれか1項に記載の駆動装置を備えていることを特徴とする圧電モーター。
- 請求項1ないし9のいずれか1項に記載の駆動装置を備えていることを特徴とするロボット。
- 請求項1ないし9のいずれか1項に記載の駆動装置を備えていることを特徴とする電子部品搬送装置。
- 請求項1ないし9のいずれか1項に記載の駆動装置を備えていることを特徴とするプリンター。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016211052A JP2018074723A (ja) | 2016-10-27 | 2016-10-27 | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター |
| CN201710843931.1A CN108011541B (zh) | 2016-10-27 | 2017-09-18 | 驱动装置、压电电动机、机器人、部件输送装置及打印机 |
| US15/782,226 US10811998B2 (en) | 2016-10-27 | 2017-10-12 | Driving device, piezoelectric motor, robot, electronic-component conveying device, and printer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016211052A JP2018074723A (ja) | 2016-10-27 | 2016-10-27 | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018074723A true JP2018074723A (ja) | 2018-05-10 |
| JP2018074723A5 JP2018074723A5 (ja) | 2019-09-26 |
Family
ID=62022625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016211052A Withdrawn JP2018074723A (ja) | 2016-10-27 | 2016-10-27 | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10811998B2 (ja) |
| JP (1) | JP2018074723A (ja) |
| CN (1) | CN108011541B (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020072533A (ja) * | 2018-10-30 | 2020-05-07 | セイコーエプソン株式会社 | 圧電駆動装置の制御方法、圧電駆動装置、ロボットおよびプリンター |
| JP2020072532A (ja) * | 2018-10-30 | 2020-05-07 | セイコーエプソン株式会社 | 圧電駆動装置、ロボットおよびプリンター |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110492785A (zh) * | 2019-08-09 | 2019-11-22 | 南京航空航天大学 | 一种十字梁旋转型超声电机及其控制方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04145873A (ja) * | 1990-10-02 | 1992-05-19 | Olympus Optical Co Ltd | 超音波モータ |
| JPH04178181A (ja) * | 1990-11-09 | 1992-06-25 | Olympus Optical Co Ltd | 超音波モータ |
| JP2004260990A (ja) * | 2003-02-06 | 2004-09-16 | Seiko Epson Corp | 駆動装置および稼動装置 |
| JP2006352989A (ja) * | 2005-06-15 | 2006-12-28 | Olympus Corp | 超音波モータの駆動装置及びその方法並びに超音波システム |
| JP2010104235A (ja) * | 2010-02-12 | 2010-05-06 | Seiko Epson Corp | 圧電アクチュエータ |
| JP2013121192A (ja) * | 2011-12-06 | 2013-06-17 | Seiko Epson Corp | アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター |
| JP2013121191A (ja) * | 2011-12-06 | 2013-06-17 | Seiko Epson Corp | 圧電モーター、駆動装置、電子部品搬送装置、電子部品検査装置、ロボットおよびプリンター |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN100566117C (zh) * | 2006-08-28 | 2009-12-02 | 哈尔滨工业大学 | 换能器耦合双向直线超声波电机及其激励方法 |
| JP4645919B2 (ja) * | 2008-09-10 | 2011-03-09 | ソニー株式会社 | レンズ駆動装置及び撮像装置 |
| WO2010113505A1 (ja) * | 2009-03-31 | 2010-10-07 | 株式会社ニコン | 圧電アクチュエータ及びレンズ鏡筒 |
| JP5791237B2 (ja) * | 2010-06-14 | 2015-10-07 | キヤノン株式会社 | 振動型駆動装置 |
| JP2012080597A (ja) * | 2010-09-30 | 2012-04-19 | Nikon Corp | 圧電アクチュエータ、レンズ鏡筒、及び撮像装置 |
| JP6103840B2 (ja) * | 2011-07-28 | 2017-03-29 | キヤノン株式会社 | 補正光学装置及び撮像装置 |
| JP6008077B2 (ja) * | 2011-12-06 | 2016-10-19 | セイコーエプソン株式会社 | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 |
| JP2013183461A (ja) * | 2012-02-29 | 2013-09-12 | Nikon Corp | 駆動装置、レンズ鏡筒及びカメラ |
| JP6214193B2 (ja) * | 2012-06-05 | 2017-10-18 | キヤノン株式会社 | 振動波駆動装置、二次元駆動装置、画像振れ補正装置、交換レンズ、撮像装置、及び自動ステージ |
| JP2014075955A (ja) | 2012-10-05 | 2014-04-24 | Nikon Corp | 駆動装置、ロボット装置及び露光装置 |
| JP6053535B2 (ja) * | 2013-01-25 | 2016-12-27 | キヤノン株式会社 | 補正光学装置、画像振れ補正装置、及び撮像装置 |
| JP6268999B2 (ja) * | 2013-12-06 | 2018-01-31 | セイコーエプソン株式会社 | 圧電モーター、ロボットハンド、ロボット、指アシスト装置、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置 |
| JP6387686B2 (ja) * | 2014-05-29 | 2018-09-12 | セイコーエプソン株式会社 | 圧電アクチュエーター |
| JP2017073890A (ja) * | 2015-10-07 | 2017-04-13 | キヤノン株式会社 | 並進駆動装置、像ぶれ補正装置、レンズ鏡筒及び撮像装置 |
-
2016
- 2016-10-27 JP JP2016211052A patent/JP2018074723A/ja not_active Withdrawn
-
2017
- 2017-09-18 CN CN201710843931.1A patent/CN108011541B/zh active Active
- 2017-10-12 US US15/782,226 patent/US10811998B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04145873A (ja) * | 1990-10-02 | 1992-05-19 | Olympus Optical Co Ltd | 超音波モータ |
| JPH04178181A (ja) * | 1990-11-09 | 1992-06-25 | Olympus Optical Co Ltd | 超音波モータ |
| JP2004260990A (ja) * | 2003-02-06 | 2004-09-16 | Seiko Epson Corp | 駆動装置および稼動装置 |
| JP2006352989A (ja) * | 2005-06-15 | 2006-12-28 | Olympus Corp | 超音波モータの駆動装置及びその方法並びに超音波システム |
| JP2010104235A (ja) * | 2010-02-12 | 2010-05-06 | Seiko Epson Corp | 圧電アクチュエータ |
| JP2013121192A (ja) * | 2011-12-06 | 2013-06-17 | Seiko Epson Corp | アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター |
| JP2013121191A (ja) * | 2011-12-06 | 2013-06-17 | Seiko Epson Corp | 圧電モーター、駆動装置、電子部品搬送装置、電子部品検査装置、ロボットおよびプリンター |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020072533A (ja) * | 2018-10-30 | 2020-05-07 | セイコーエプソン株式会社 | 圧電駆動装置の制御方法、圧電駆動装置、ロボットおよびプリンター |
| JP2020072532A (ja) * | 2018-10-30 | 2020-05-07 | セイコーエプソン株式会社 | 圧電駆動装置、ロボットおよびプリンター |
| JP7205163B2 (ja) | 2018-10-30 | 2023-01-17 | セイコーエプソン株式会社 | 圧電駆動装置の制御方法、圧電駆動装置、ロボットおよびプリンター |
| JP7205162B2 (ja) | 2018-10-30 | 2023-01-17 | セイコーエプソン株式会社 | 圧電駆動装置、ロボットおよびプリンター |
Also Published As
| Publication number | Publication date |
|---|---|
| US20180123483A1 (en) | 2018-05-03 |
| CN108011541B (zh) | 2021-11-12 |
| CN108011541A (zh) | 2018-05-08 |
| US10811998B2 (en) | 2020-10-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6828342B2 (ja) | 圧電アクチュエーター、圧電モーター、ロボット、電子部品搬送装置、プリンターおよび圧電アクチュエーターの製造方法 | |
| JP2019067861A (ja) | 圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置およびプリンター | |
| JP2016182016A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| CN108011541B (zh) | 驱动装置、压电电动机、机器人、部件输送装置及打印机 | |
| JP2018038188A (ja) | 振動子、圧電アクチュエーター、圧電モーター、ロボット、電子部品搬送装置および振動子の製造方法 | |
| CN110784122B (zh) | 压电驱动装置、机器人以及打印机 | |
| US11205973B2 (en) | Method of controlling piezoelectric drive device, method of controlling robot, and method of controlling printer | |
| JP6442913B2 (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP6948772B2 (ja) | 圧電素子、圧電アクチュエーター、圧電モーター、ロボット、電子部品搬送装置およびプリンター | |
| JP2018074011A (ja) | 圧電駆動装置、圧電モーター、ロボット、電子部品搬送装置、プリンターおよび圧電駆動装置の製造方法 | |
| US11233465B2 (en) | Piezoelectric drive device, robot, and printer | |
| JP2018057148A (ja) | 振動子、圧電アクチュエーター、圧電モーター、ロボット、電子部品搬送装置およびプリンター | |
| JP7077682B2 (ja) | 圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2019146435A (ja) | 圧電駆動装置、圧電アクチュエーターの制御方法、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2018037507A (ja) | 振動子、圧電アクチュエーター、圧電モーター、ロボットおよび電子部品搬送装置 | |
| JP2020191767A (ja) | 圧電アクチュエーター及びロボット | |
| JP2019114671A (ja) | 圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP4844204B2 (ja) | 記録装置、液体噴射装置および駆動機構 | |
| JP2018037829A (ja) | 振動子、圧電アクチュエーター、圧電モーター、ロボット、電子部品搬送装置および振動子の製造方法 | |
| JP2018074773A (ja) | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター | |
| JP2018019540A (ja) | 圧電アクチュエーター、圧電モーター、ロボットおよび電子部品搬送装置 | |
| JP2019146365A (ja) | 圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2007260981A (ja) | 記録装置および液体噴射装置 | |
| JP4844203B2 (ja) | 記録装置 | |
| JP2019160975A (ja) | 圧電アクチュエーター、圧電アクチュエーターの付加力検出方法、圧電アクチュエーターの共振状態検出方法、圧電駆動装置、ハンド、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190814 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190814 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200617 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200623 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20200807 |