CN108011541B - 驱动装置、压电电动机、机器人、部件输送装置及打印机 - Google Patents
驱动装置、压电电动机、机器人、部件输送装置及打印机 Download PDFInfo
- Publication number
- CN108011541B CN108011541B CN201710843931.1A CN201710843931A CN108011541B CN 108011541 B CN108011541 B CN 108011541B CN 201710843931 A CN201710843931 A CN 201710843931A CN 108011541 B CN108011541 B CN 108011541B
- Authority
- CN
- China
- Prior art keywords
- vibration
- vibrators
- vibration mode
- rotor
- driving
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 230000005540 biological transmission Effects 0.000 claims abstract description 69
- 230000010355 oscillation Effects 0.000 claims abstract 2
- 239000000758 substrate Substances 0.000 description 22
- 238000000034 method Methods 0.000 description 12
- 230000000694 effects Effects 0.000 description 11
- 230000033001 locomotion Effects 0.000 description 5
- 239000000919 ceramic Substances 0.000 description 4
- 239000010949 copper Substances 0.000 description 4
- 239000000463 material Substances 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 239000010936 titanium Substances 0.000 description 4
- 238000011144 upstream manufacturing Methods 0.000 description 4
- PXHVJJICTQNCMI-UHFFFAOYSA-N Nickel Chemical compound [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 3
- 229910045601 alloy Inorganic materials 0.000 description 3
- 239000000956 alloy Substances 0.000 description 3
- 238000007689 inspection Methods 0.000 description 3
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 3
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- GWEVSGVZZGPLCZ-UHFFFAOYSA-N Titan oxide Chemical compound O=[Ti]=O GWEVSGVZZGPLCZ-UHFFFAOYSA-N 0.000 description 2
- RTAQQCXQSZGOHL-UHFFFAOYSA-N Titanium Chemical compound [Ti] RTAQQCXQSZGOHL-UHFFFAOYSA-N 0.000 description 2
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- 229910052782 aluminium Inorganic materials 0.000 description 2
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 2
- 229910052454 barium strontium titanate Inorganic materials 0.000 description 2
- 229910052802 copper Inorganic materials 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 239000012636 effector Substances 0.000 description 2
- 239000010931 gold Substances 0.000 description 2
- 210000002478 hand joint Anatomy 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 238000004544 sputter deposition Methods 0.000 description 2
- 229910052719 titanium Inorganic materials 0.000 description 2
- WFKWXMTUELFFGS-UHFFFAOYSA-N tungsten Chemical compound [W] WFKWXMTUELFFGS-UHFFFAOYSA-N 0.000 description 2
- 229910052721 tungsten Inorganic materials 0.000 description 2
- 239000010937 tungsten Substances 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- VNSWULZVUKFJHK-UHFFFAOYSA-N [Sr].[Bi] Chemical compound [Sr].[Bi] VNSWULZVUKFJHK-UHFFFAOYSA-N 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- -1 and the like) Inorganic materials 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 239000013590 bulk material Substances 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 238000013016 damping Methods 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 230000005611 electricity Effects 0.000 description 1
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000009413 insulation Methods 0.000 description 1
- 229910000765 intermetallic Inorganic materials 0.000 description 1
- 229910052741 iridium Inorganic materials 0.000 description 1
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical compound [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 239000007769 metal material Substances 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- NJPPVKZQTLUDBO-UHFFFAOYSA-N novaluron Chemical compound C1=C(Cl)C(OC(F)(F)C(OC(F)(F)F)F)=CC=C1NC(=O)NC(=O)C1=C(F)C=CC=C1F NJPPVKZQTLUDBO-UHFFFAOYSA-N 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 1
- UKDIAJWKFXFVFG-UHFFFAOYSA-N potassium;oxido(dioxo)niobium Chemical compound [K+].[O-][Nb](=O)=O UKDIAJWKFXFVFG-UHFFFAOYSA-N 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 239000011347 resin Substances 0.000 description 1
- 229920005989 resin Polymers 0.000 description 1
- 229910052706 scandium Inorganic materials 0.000 description 1
- SIXSYDAISGFNSX-UHFFFAOYSA-N scandium atom Chemical compound [Sc] SIXSYDAISGFNSX-UHFFFAOYSA-N 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- XMVONEAAOPAGAO-UHFFFAOYSA-N sodium tungstate Chemical compound [Na+].[Na+].[O-][W]([O-])(=O)=O XMVONEAAOPAGAO-UHFFFAOYSA-N 0.000 description 1
- 238000003980 solgel method Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
- 239000011787 zinc oxide Substances 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/002—Driving devices, e.g. vibrators using only longitudinal or radial modes
- H02N2/0025—Driving devices, e.g. vibrators using only longitudinal or radial modes using combined longitudinal modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/101—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors using intermittent driving, e.g. step motors
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/14—Drive circuits; Control arrangements or methods
- H02N2/142—Small signal circuits; Means for controlling position or derived quantities, e.g. speed, torque, starting, stopping, reversing
Landscapes
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Abstract
本发明提供具有优异的驱动特性的驱动装置、压电电动机、机器人、电子部件输送装置及打印机。驱动装置具有:多个振动体,每个振动体具有将振动传递至被驱动部的传递部;以及控制部,使至少两个所述振动体的所述传递部的振动轨迹分别独立地改变。另外,当将所述被驱动部和所述振动体排列的方向设为第一方向,将正交于所述第一方向的方向设为第二方向时,至少两个所述振动体分别具有所述传递部在所述第一方向和所述第二方向中的至少一个方向上的振幅不同的多个振动模式,所述控制部按所述多个振动模式中的任一个振动模式分别驱动至少两个所述振动体。
Description
技术领域
本发明涉及驱动装置、压电电动机、机器人、电子部件输送装置及打印机。
背景技术
以往,作为对被驱动体进行位移驱动的驱动装置,已知如下的构成:具有在被驱动体发生位移的方向上并排配置并且在与被驱动体发生位移的方向平行的方向上振动的多个驱动元件和将驱动元件的振动传递至被驱动体的接触器,该构成通过利用接触器将驱动元件的振动传递至被驱动体,使被驱动体发生位移(例如,专利文献1)。
现有技术文献
专利文献
专利文献1:日本特开2014-75955号公报
然而,在专利文献1的驱动装置中,由于无法使接触器的振动轨迹发生变化,因此例如无法高精度地控制被驱动体的旋转速度,难以发挥优异的驱动特性。
发明内容
本发明的目的在于,提供具有优异的驱动特性的驱动装置、压电电动机、机器人、电子部件输送装置及打印机。
通过以下的本发明达到上述目的。
本发明的驱动装置,其特征在于,具有:多个振动体,具有将振动传递至被驱动部的传递部;以及控制部,使所述多个振动体的所述传递部的振动轨迹分别独立地改变。
根据这种构成的驱动装置,通过分别独立地控制多个振动体的传递部的振动轨迹(例如,使所有的振动体的传递部的振动轨迹相同,或者使某个振动体的传递部的振动轨迹区别于其他振动体的传递部的振动轨迹),能够高精度地控制对被驱动部的驱动,能够按期望的条件且稳定地驱动被驱动部。因此,得到具有优异的驱动特性的驱动装置。
在本发明的驱动装置中,优选地,所述多个振动体的所述传递部的振动轨迹彼此不同。
由此,能够更加高精度地控制对被驱动部的驱动。
在本发明的驱动装置中,优选地,当将所述被驱动部和所述振动体排列的方向设为第一方向,将正交于所述第一方向的方向设为第二方向时,所述多个振动体具有在所述第一方向和所述第二方向中的至少一个方向上的振幅不同的多个振动模式,所述控制部按所述多个振动模式中的任一个振动模式驱动所述多个振动体。
像这样,如果振动体具有多个振动模式,则通过从多个振动模式中选择一个振动模式,能够简单地使传递部的振动轨迹发生变化。因而,控制部中的控制变得简单。
在本发明的驱动装置中,优选地,所述多个振动模式包括第一振动模式和第二振动模式,在所述第一振动模式中,所述传递部在所述第一方向和所述第二方向上具有振幅,在所述第二振动模式中,所述传递部在所述第二方向上的振幅小于所述第一振动模式中的振幅。
由此,能够使被驱动部更加可靠且顺畅地旋转。进而,振动体的构成变得简单。
在本发明的驱动装置中,优选地,所述多个振动模式包括第一振动模式和第三振动模式,在所述第一振动模式中,所述传递部在所述第一方向和所述第二方向上具有振幅,在所述第三振动模式中,所述传递部在所述第一方向上的振幅小于所述第一振动模式中的振幅。
由此,能够使被驱动部更加可靠且顺畅地旋转。进而,振动体的构成变得简单。
在本发明的驱动装置中,优选地,所述控制部根据所述被驱动部的驱动速度改变所述传递部按所述第一振动模式振动的所述振动体的个数。
由此,能够更加高精度地控制被驱动部的驱动,能够发挥更优异的驱动特性。
在本发明的驱动装置中,优选地,当所述被驱动部的驱动速度变大时,所述控制部增加所述传递部按所述第一振动模式振动的所述振动体的个数。
由此,能够更加高精度地控制对被驱动部的驱动,能够发挥更优异的驱动特性。
在本发明的驱动装置中,优选地,所述振动体具有压电体。
由此,能够利用简单的构成使振动体振动。另外,也能够实现振动体的小型化。
在本发明的驱动装置中,优选地,所述振动体具有层叠的多个所述压电体。
由此,振动体的驱动力变得更大。
本发明的压电电动机,其特征在于,具备:本发明的驱动装置。
由此,能够获得本发明的驱动装置的效果,得到具有优异的驱动特性的压电电动机。
本发明的机器人,其特征在于,具备:本发明的驱动装置。
由此,能够获得本发明的驱动装置的效果,得到具有高可靠性的机器人。
本发明的电子部件输送装置,其特征在于,具备:本发明的驱动装置。
由此,能够获得本发明的驱动装置的效果,得到具有高可靠性的电子部件输送装置。
本发明的打印机,其特征在于,具备:本发明的驱动装置。
由此,能够获得本发明的驱动装置的效果,得到具有高可靠性的打印机。
附图说明
图1是示出本发明的第一实施方式的压电电动机的整体构成的俯视图。
图2是示出图1所示的压电电动机的变形例的侧视图。
图3是示出图1所示的压电电动机所具有的振动体的俯视图。
图4是图3所示的振动体的立体图。
图5是图3中的A-A线截面图。
图6是图3中的B-B线截面图。
图7是示出第一振动模式的俯视图。
图8是示出第二振动模式的俯视图。
图9是示出压电电动机的控制方法(驱动方法)的表。
图10是示出本发明的第二实施方式的压电电动机所具有的振动体的第三振动模式的俯视图。
图11是示出压电电动机的控制方法(驱动方法)的表。
图12是示出本发明的第三实施方式的压电电动机的控制方法(驱动方法)的表。
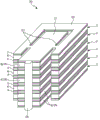
图13是示出本发明的第四实施方式的压电电动机所具有的振动体的立体图。
图14是示出本发明的第五实施方式的机器人的立体图。
图15是示出本发明的第六实施方式的电子部件输送装置的立体图。
图16是示出图15所示的电子部件输送装置所具有的电子部件保持部的立体图。
图17是示出本发明的第七实施方式的打印机的整体构成的概略图。
附图标记说明
1、1x、1y、1θ 驱动装置 2、20 振动体
21 振动部 22 支撑部
23 连接部 24 传递部
3 第一基板 31 振动板
32 支撑板 33 连接部
4 第二基板 41 振动板
42 支撑板 43 连接部
5、5a、5b、5c、5d 压电元件
51 第一电极 52 压电体
53 第二电极 6 基板间部
9 控制部 100 压电电动机
110 转子 111 外周面
1000 机器人 1010 基座
1020、1030、1040、1050、1060、1070 臂
1080 机器人控制部 1090 端执行器
2000 电子部件输送装置 2100 底座
2110 上游侧载物台 2120 下游侧载物台
2130 检查台 2200 支撑台
2210 Y载物台 2220 X载物台
2230 电子部件保持部 2231 微调整板
2232 转动部 2233 保持部
3000 打印机 3010 装置主体
3011 托盘 3012 排纸口
3013 操作面板 3020 印刷机构
3021 头单元 3021a 头
3021b 墨盒 3021c 滑架
3022 滑架电动机 3023 往复移动机构
3023a 滑架引导轴 3023b 正时皮带
3030 供纸机构 3031 从动辊
3032 驱动辊 3040 控制部
O 转动轴 P 记录纸张
Q 电子部件 X 第一方向
Y 第二方向 a、b 箭头
具体实施方式
下面,基于附图所示的优选实施方式对本发明的驱动装置、压电电动机、机器人、电子部件输送装置及打印机进行详细说明。
第一实施方式
首先,说明本发明的第一实施方式的压电电动机。
图1是示出本发明的第一实施方式的压电电动机的整体构成的俯视图。图2是示出图1所示的压电电动机的变形例的侧视图。图3是示出图1所示的压电电动机所具有的振动体的俯视图。图4是图3所示的振动体的立体图。图5是图3中的A-A线截面图。图6是图3中的B-B线截面图。图7是示出第一振动模式的俯视图。图8是示出第二振动模式的俯视图。图9是示出压电电动机的控制方法(驱动方法)的表。需要说明的是,以下,为了方便说明,将图1中的纸面跟前侧也称作“上”,将图1中的纸面里侧也称作“下”。另外,将驱动装置的转子侧也称作“远端侧”,将转子的相反侧也称作“近端侧”。
图1所示的压电电动机100(超声波电动机)具有作为能够绕转动轴O旋转的被驱动部(从动部)的转子110和使转子110旋转的驱动装置1。在这样的压电电动机100中,通过驱动驱动装置1(使其振动),能够使转子110绕转动轴O旋转。需要说明的是,作为压电电动机100的构成,并不限定于图1的构成。例如,在本实施方式中,作为被驱动部,使用了旋转移动的转子110,但被驱动部并不限定于转子110。例如,作为被驱动部,也可以使用直线移动的物体。
下面,对驱动装置1进行详细说明。如图1所示,驱动装置1具有:多个振动体2,具有将振动传递至转子110的传递部24;以及控制部9,使至少两个振动体2的传递部24的振动轨迹分别独立地改变。并且,通过分别驱动该多个振动体2(使其振动),能够使转子110绕转动轴O旋转。根据这种构成的驱动装置1,能够分别独立地控制多个振动体2的传递部24的振动轨迹(例如,使所有的振动体2的传递部24的振动轨迹相同,或者使某个振动体2的传递部24的振动轨迹区别于其他振动体2的传递部24的振动轨迹),因而,能够高精度地控制转子110的旋转(速度、制动力、转矩等),能够按期望的条件(速度等)且更稳定地驱动转子110。因此,得到具有优异的驱动特性的驱动装置1。下面,对这样的驱动装置1进行详细说明。
如图1所示,驱动装置1具有多个(4个)振动体2和控制各振动体2的驱动的控制部9。另外,多个振动体2分别配置为抵接于转子110的外周面111。另外,多个振动体2在转子110的旋转方向(转子110的移动方向:转子110的周向)上并排且相互分开配置。需要说明的是,在本实施方式中,多个振动体2以等角度间隔配置在转子110的周围,但并不限定于这种配置。
需要说明的是,本实施方式的驱动装置1具有4个振动体2,但作为振动体2的个数,并无特别限定,只要为多个(2个以上)即可,既可以为2个、3个,也可以为5个以上。不过,作为振动体2的个数,优选为5个以上200个以下。由此,得到既能够防止压电电动机100过度大型化又能够发挥充分的驱动力的驱动装置1。另外,在本实施方式的驱动装置1中,多个振动体2在转子110的旋转方向上并排配置,但也可以是,例如,如图2所示,其在沿转子110的转动轴O的方向上并排配置。
接着,对振动体2的构成进行说明。需要说明的是,多个振动体2是彼此相同的构成。如图3所示,振动体2具有振动部21、支撑振动部21的支撑部22、连接振动部21和支撑部22的一对连接部23以及设置于振动部21的传递部24。振动部21在从振动体2的厚度方向观察的俯视观察时形成大致长方形形状(纵长形状),在其远端部设置有传递部24。另外,支撑部22是包围振动部21的近端侧的U字形形状。
另外,振动体2固定于支撑部22中的载物台(stage)等未图示的固定部件,通过振动部21振动从而传递部24振动,振动部24的振动传递至转子110。需要说明的是,振动体2受到未图示的施力部件的施力从而被按压至转子110,传递部24用足够的摩擦力接触转子110。因而,抑制了打滑,能够将传递部24的振动高效地传递至转子110。
如图4所示,这样的振动体2具有第一基板3、第二基板4、位于第一基板3和第二基板4之间的压电元件5以及基板间部6。另外,如图5和图6所示,第一基板3具有振动板31、支撑振动板31的支撑板32以及连接振动板31和支撑板32的一对连接部33,同样,第二基板4具有振动板41、支撑振动板41的支撑板42以及连接振动板41和支撑板42的一对连接部43。第一基板3和第二基板4具有实质上相同的形状和大小,在第一基板3和第二基板4上隔着压电元件5配置振动板31、41,隔着基板间部6配置支撑板32、42。并且,由振动板31、压电元件5及振动板41的层叠体构成振动部21,由支撑板32、基板间部6及支撑板42的层叠体构成支撑部22,由连接部33、43构成连接部23。作为第一基板3和第二基板4,并无特别限定,例如,可以使用硅基板。
如图3所示,压电元件5包括4个压电元件5a、5b、5c、5d。压电元件5a、5b位于振动部21的宽度方向的一侧,沿振动部21的长度方向配置。另一方面,压电元件5c、5d位于振动部21的宽度方向的另一侧,沿振动部21的长度方向配置。
另外,如图5和图6所示,4个压电元件5a、5b、5c、5d分别具有压电体52、设置于压电体52的上表面(振动板31一侧的主面)的第一电极51以及设置于压电体52的下表面(振动板41一侧的主面)的第二电极53。
第一电极51是针对压电元件5a、5b、5c、5d共用地设置的公共电极。另一方面,第二电极53是针对压电元件5a、5b、5c、5d各自单独设置的单个电极。另外,压电体52以由压电元件5a、5b、5c、5d共用的方式一体设置。需要说明的是,压电体52也可以针对压电元件5a、5b、5c、5d各自单独设置。
通过施加沿振动部21的厚度方向的方向上的电场,压电体52在沿振动部21的长度方向的方向上伸缩。作为这样的压电体52的构成材料,例如可以使用锆钛酸铅(PZT)、钛酸钡、钛酸铅、铌酸钾、铌酸锂、钽酸锂、钨酸钠、氧化锌、钛酸锶钡(BST)、钽酸锶铋(SBT)、偏铌酸铅、钪铌酸铅等的压电陶瓷。由压电陶瓷构成的压电体52例如既可以用块状材料形成,也可以用溶胶-凝胶法、溅射法形成。需要说明的是,作为压电体52的构成材料,除上述压电陶瓷之外,还可以使用聚偏氟乙烯、水晶等。
作为第一电极51和第二电极53的构成材料,并无特别限定,只要具有导电性即可,可列举出例如铝(Al)、镍(Ni)、金(Au)、铂(Pt)、铱(Ir)、铜(Cu)、钛(Ti)、钨(W)等的金属材料或者包含它们中的至少一种的合金(例如钛(Ti)/钨(W)类合金、铜(Cu)/铝(Al)类合金等)、金属间化合物,可以使用它们中的一种或者将两种以上组合(例如作为两层以上的层叠体)使用。另外,第一电极51和第二电极53可以分别通过蒸镀、溅射等形成。
如果对第一电极51和第二电极53之间施加由未图示的电源部供给的驱动电压,则各压电元件5a、5b、5c、5d按照驱动电压的模式振动,整个振动部21振动。
另外,如图4和图6所示,基板间部6位于支撑板32和支撑板42之间。这样的基板间部6具有绝缘性,另外,大致等于压电元件5的厚度。作为基板间部6,并无特别限定,例如可以使用氧化锆、氧化铝、氧化钛等的各种陶瓷、硅、各种树脂材料等。
以上说明了振动体2。如上所述,这样的振动体2具有因通电而振动的压电体52(压电元件5)。因而,能够利用简单的构成使振动体2(振动部21)振动。另外,也能够实现振动体2的小型化。
在这样的多个振动体2中,至少两个振动体2分别具有传递部24的振动轨迹不同的多个振动模式。具体而言,在将转子110和振动体2排列的方向设为第一方向x(振动部21的长度方向:图3中的纵向)、将正交于第一方向x的方向设为第二方向y(振动部21的宽度方向:图3中的横向)时,至少两个振动体2分别具有在第一方向x和第二方向y中的至少一个方向上的振幅不同的多个振动模式。另外,控制部9按多个振动模式中的任一个振动模式分别驱动至少两个振动体2。像这样,如果振动体2具有振动部24的振动轨迹不同的多个振动模式,则通过从多个振动模式中选择一个振动模式,能够改变传递部24的振动轨迹。因而,控制部9中的控制变得简单。
需要说明的是,如上所述,在多个振动体2中,至少两个振动体2具有传递部24的振动轨迹不同的多个振动模式即可,但在本实施方式中,所有的振动体2均具有传递部24的振动轨迹不同的多个振动模式。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
接着,对各振动体2所具有的多个振动模式进行说明。作为多个振动模式,并无特别限定,只要传递部24的振动轨迹不同即可。在本实施方式中,多个振动模式包括传递部24在第一方向x和第二方向y上具有振幅的第一振动模式以及传递部24在第二方向y上的振幅小于第一振动模式的第二振动模式的振幅。
例如,如图7所示,第一振动模式是传递部24的远端进行椭圆运动的振动模式。为了按第一振动模式驱动振动体2,例如对压电元件5b、5c施加交流电压(驱动电压),使压电元件5b、5c在相同定时伸缩即可。于是,振动部21在其面内方向上呈S字形形状弯曲变形(向第一方向x伸缩变形并且向第二方向y进行二次弯曲变形),传递部24进行椭圆运动。该第一振动模式是主要用于产生使转子110旋转的驱动力的振动模式。即,如图7所示,如果使振动体2按第一振动模式振动,则由传递部24送出转子110,转子110绕转动轴O在箭头a的方向上旋转。需要说明的是,如果对压电元件5a、5d施加交流电压(驱动电压),并使压电元件5a、5d伸缩,则能够使传递部24按与图7反向的椭圆运动振动,能够使转子110反向旋转(在图7中的箭头b的方向上旋转)。
另一方面,例如如图8所示,第二振动模式是传递部24的远端进行纵向运动(沿第一方向x振动)的振动模式。为了按第二振动模式驱动振动体2,例如对压电元件5a、5b、5c、5d施加交流电压(驱动电压),使压电元件5a、5b、5c、5d在相同定时伸缩即可。该第二振动模式是实质上未产生使转子110旋转的驱动力、用于允许因其他振动体2按第一振动模式振动而产生的转子110的旋转的振动模式。
详细说明的话,如上所述,各振动体2受到朝向转子110的施力,在非驱动状态下,各传递部24用足够的摩擦力抵接于转子110的外周面111。因而,如果存在未驱动的振动体2,则该振动体2成为阻力(阻碍),担心出现即使使部分振动体2按第一振动模式振动而使转子110旋转,也无法使转子110旋转,或者即使旋转了也达不到期望的旋转速度等的问题。因此,关于未按第一振动模式驱动的振动体2,需要减小其与转子110的摩擦力而允许转子110旋转,实现这一点的便是第二振动模式。由于第二振动模式是纵向振动(在相对于转子110靠近、离开的方向上的往复振动),因此当在离开方向上振动时,与转子110的摩擦力下降(如果传递部24离开转子110,则摩擦力变为0)。因而,平均下来,与非驱动状态相比,能够减小传递部24与转子110的摩擦力,能够允许转子110旋转。
像这样,通过多个振动模式包括第一振动模式和第二振动模式,能够使转子110更加可靠且顺畅地旋转。进而,振动体2的构成变得简单。关于这一点详细说明的话,如上所述,由于第一振动模式是用于产生使转子110旋转的驱动力的振动模式,因此为了使转子110旋转,需要能够按第一振动模式振动的振动体2。并且,作为能够按第一振动模式振动的振动体2,比较简单的构成是如本实施方式那样具有四个压电元件5a、5b、5c、5d的构成。在这种构成的振动体2中能够实现的、能够将与转子110的摩擦力降低至低于非驱动状态的振动模式便是第二振动模式。像这样,第二振动模式是一种只要在能够按第一振动模式振动的振动体2中便能够简单地产生的振动模式。因而,振动体2的构成并未复杂化,如上所述,振动体2的构成变得简单。
接着,说明控制部9。控制部9用于控制从未图示的电源部供给的驱动电压的模式,其能够独立地控制至少两个振动体2的驱动。需要说明的是,在本实施方式中,控制部9能够独立地控制所有振动体2的驱动。即,控制部9针对所有的振动体2能够选择使其按第一振动模式振动还是按第二振动模式振动。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
另外,控制部9根据转子110的驱动速度(旋转速度)改变传递部24按第一振动模式振动的振动体2的个数。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。具体而言,当转子110的驱动速度(旋转速度)变大时(随着变快),控制部9增加传递部24按第一振动模式振动的振动体2的个数。即,随着转子110的驱动速度(旋转速度)变快,控制部9产生更大的驱动力。例如,如图9所示,当以低速驱动转子110时,使一个振动体2按第一振动模式振动,并按第二振动模式驱动其他振动体2。另外,当以中速(比低速快的速度)驱动转子110时,使两个振动体2按第一振动模式振动,并按第二振动模式驱动其他振动体2。另外,当以高速(比中速快的速度)驱动转子110时,使三个振动体2按第一振动模式振动,并按第二振动模式驱动其他振动体2。另外,当以超高速(比高速快的速度)驱动转子110时,使所有的振动体2按第一振动模式振动。需要说明的是,随着按第一振动模式振动的振动体2的个数增加,转矩及驱动速度也一起变高。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
以上说明了压电电动机100。压电电动机100具备驱动装置1。因而,由于能够获得上述驱动装置1的效果,因此能够发挥优异的驱动特性。
第二实施方式
接着,说明本发明的第二实施方式的压电电动机。
图10是示出本发明的第二实施方式的压电电动机所具有的振动体的第三振动模式的俯视图。图11是示出压电电动机的控制方法(驱动方法)的表。
下面,关于第二实施方式的压电电动机,以与上述实施方式的不同点为中心进行说明,而省略对相同事项的说明。
本发明的第二实施方式的压电电动机除了振动体所具有的振动模式不同外,其余与上述第一实施方式大致相同。需要说明的是,对与上述实施方式相同的构成标注相同的附图标记。
在本实施方式中,多个振动体2中的至少两个振动体2分别具有传递部24在第一方向x和第二方向y中的至少一个方向上的振幅不同的多个振动模式。另外,控制部9按多个振动模式中的任一个振动模式分别驱动至少两个振动体2。需要说明的是,如上所述,在多个振动体2中,至少两个振动体2具有传递部24的振动轨迹不同的多个振动模式即可,但在本实施方式中,所有的振动体2均具有传递部24的振动轨迹不同的多个振动模式。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
接着,对各振动体2所具有的多个振动模式进行说明。作为多个振动模式,并无特别限定,只要传递部24的振动轨迹不同即可。在本实施方式中,多个振动模式包括传递部24在第一方向x和第二方向y上具有振幅的第一振动模式以及传递部24在第一方向x上的振幅小于第一振动模式的振幅的第三振动模式。
由于第一振动模式与在上述第一实施方式中所说明的第一振动模式相同,因此省略说明。另一方面,例如如图10所示,第三振动模式是传递部24的远端进行横向运动(沿第二方向y振动)的振动模式。为了按第三振动模式驱动振动体2,例如对压电元件5a、5b和压电元件5c、5d施加相位偏移180°的交流电压(驱动电压),使压电元件5a、5b和压电元件5c、5d交替伸缩即可。该第三振动模式是实质上未产生使转子110旋转的驱动力、用于允许因其他振动体2按第一振动模式振动而产生的转子110的旋转的振动模式(即,具有与上述第二振动模式相同的功能的振动模式)。
详细说明的话,如在上述第一实施方式中说明的那样,如果存在未驱动的振动体2,则该振动体2成为阻碍,担心出现即使使部分振动体2按第一振动模式振动而使转子110旋转,也无法使转子110旋转,或者即使旋转了也达不到期望的旋转速度等的问题。因此,关于未按第一振动模式驱动的振动体2,需要减小其与转子110的摩擦力而允许转子110旋转,实现这一点的便是第三振动模式。由于第三振动模式是横向振动,实质上未产生纵向振动,因此传递部24与转子110的摩擦力不如第一振动模式大。结果,振动部24以相对于转子110的外周面111滑动的方式(打滑的方式)振动。因而,与非驱动状态相比,能够减小传递部24与转子110的平均摩擦力,能够允许转子110旋转。
像这样,通过多个振动模式包括第一振动模式和第三振动模式,能够使转子110更加可靠且顺畅地旋转。进而,振动体2的构成变得简单。即,第三振动模式与上述第二振动模式同样,是一种只要在能够按第一振动模式振动的振动体2中便能够简单地产生的振动模式。因而,振动体2的构成并未复杂化,如上所述,振动体2的构成变得简单。
接着,说明控制部9。控制部9能够独立地控制至少两个振动体2的驱动。需要说明的是,在本实施方式中,控制部9能够独立地控制所有振动体2的驱动。即,控制部9针对所有的振动体2能够选择使其按第一振动模式振动还是按第三振动模式振动。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
另外,控制部9根据转子110的驱动速度(旋转速度)改变传递部24按第一振动模式振动的振动体2的个数。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。具体而言,随着转子110的驱动速度(旋转速度)变快,控制部9增加传递部24按第一振动模式振动的振动体2的个数。即,随着转子110的驱动速度(旋转速度)变快,控制部9产生更大的驱动力。例如,如图11所示,当以低速驱动转子110时,使一个振动体2按第一振动模式振动,并按第三振动模式驱动其他振动体2。另外,当以中速(比低速快的速度)驱动转子110时,使两个振动体2按第一振动模式振动,并按第三振动模式驱动其他振动体2。另外,当以高速(比中速快的速度)驱动转子110时,使三个振动体2按第一振动模式振动,并按第三振动模式驱动其他振动体2。另外,当以超高速(比高速快的速度)驱动转子110时,使所有的振动体2按第一振动模式振动。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
根据上述那样的第二实施方式,也能够发挥与上述第一实施方式相同的效果。
第三实施方式
接着,说明本发明的第三实施方式的压电电动机。
图12是示出本发明的第三实施方式的压电电动机的控制方法(驱动方法)的表。
下面,关于第三实施方式的压电电动机,以与上述实施方式的不同点为中心进行说明,而省略对相同事项的说明。
本发明的第三实施方式的压电电动机除了振动体所具有的振动模式不同外,其余与上述第一实施方式大致相同。需要说明的是,对与上述实施方式相同的构成标注相同的附图标记。
在本实施方式中,多个振动体2中的至少两个振动体2分别具有传递部24在第一方向x和第二方向y中的至少一个方向上的振幅不同的多个振动模式。另外,控制部9按多个振动模式中的任一个振动模式分别驱动至少两个振动体2。需要说明的是,如上所述,在多个振动体2中,至少两个振动体2具有传递部24的振动轨迹不同的多个振动模式即可,但在本实施方式中,所有的振动体2均具有传递部24的振动轨迹不同的多个振动模式。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
接着,对各振动体2所具有的多个振动模式进行说明。作为多个振动模式,并无特别限定,只要传递部24的振动轨迹不同即可。在本实施方式中,多个振动模式包括使传递部24在第一方向x上振动且在第二方向y上振动的第一振动模式、使传递部24按在第二方向y上的振幅小于第一振动模式的振幅的方式振动的第二振动模式、以及使传递部24按在第一方向x上的振幅小于第一振动模式的振幅的方式振动的第三振动模式。由于第一、第二、第三振动模式与在上述第一、第二实施方式中所说明的第一、第二、第三振动模式相同,因此省略其说明。
接着,说明控制部9。控制部9能够独立地控制至少两个振动体2的驱动。需要说明的是,在本实施方式中,控制部9能够独立地控制所有振动体2的驱动。即,控制部9针对所有的振动体2能够选择使其按第一振动模式振动还是按第二振动模式振动或者按第三振动模式振动。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
另外,控制部9根据转子110的驱动速度(旋转速度)改变传递部24按第一振动模式振动的振动体2的个数。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。具体而言,随着转子110的驱动速度(旋转速度)变快,控制部9增加传递部24按第一振动模式振动的振动体2的个数。即,随着转子110的驱动速度(旋转速度)变快,控制部9产生更大的驱动力。例如,如图12所示,当以低速驱动转子110时,使一个振动体2按第一振动模式振动,并按第二振动模式或第三振动模式驱动其他振动体2。另外,当以中速(比低速快的速度)驱动转子110时,使两个振动体2按第一振动模式振动,并按第二振动模式或第三振动模式驱动其他振动体2。另外,当以高速(比中速快的速度)驱动转子110时,使三个振动体2按第一振动模式振动,并按第二振动模式或第三振动模式驱动其他振动体2。另外,当以超高速(比高速快的速度)驱动转子110时,使所有的振动体2按第一振动模式振动。由此,能够更加高精度地控制转子110的旋转(速度、制动力、转矩等),得到具有更优异的驱动特性的驱动装置1。
另外,例如,将以低速驱动转子110的情况为例进行说明,通过变更未按第一振动模式驱动的三个振动体2中的按第二振动模式振动的振动体2的个数,能够进一步高精度地控制转子110的旋转(速度、制动力、转矩等)。详细说明的话,例如,假设当按第二振动模式振动时的传递部24与转子110的平均摩擦力F2小于当按第三振动模式振动时的传递部24与转子110的平均摩擦力F3,通过增加按第二振动模式振动的振动体2的个数,能够减小三个振动体2的整体摩擦力,转子110的旋转速度稍微变快。即,如图12所示,即使在低速下,也能够分四个阶段(由慢到快依次为低速1、低速2、低速3、低速4)选择速度。中速、高速也同样如此。
根据上述那样的第三实施方式,也能够发挥与上述第一实施方式相同的效果。需要说明的是,在本实施方式中,对摩擦力F2小于摩擦力F3的情况进行了说明,但并不限定于此,摩擦力F2也可以大于摩擦力F3。这时,也能够进行与本实施方式相同的控制。另外,摩擦力F2与摩擦力F3也可以相等。
第四实施方式
接着,说明本发明的第四实施方式的压电电动机。
图13是示出本发明的第四实施方式的压电电动机所具有的振动体的立体图。
下面,关于第四实施方式的压电电动机,以与上述实施方式的不同点为中心进行说明,而省略对相同事项的说明。
本发明的第四实施方式的压电电动机除了振动体的构成不同外,其余与上述第一实施方式大致相同。需要说明的是,对与上述实施方式相同的构成标注相同的附图标记。
如图13所示,本实施方式的振动体20具有层叠的多个压电体52。具体而言,振动体20是将多个上述第一实施方式的振动体2层叠而成的构成。由此,振动体20的驱动力变得更大。需要说明的是,控制部9进行对属于一个振动体20的多个振动体2施加相同的驱动电压的控制。
根据上述那样的第四实施方式,也能够发挥与上述第一实施方式相同的效果。需要说明的是,作为振动体的构成,并无特别限定,层叠多个压电体即可,但也可以是例如在上述第一实施方式中说明的振动体2中,在振动板31和振动板41之间层叠多个压电体52(压电元件5)而成的构成。
第五实施方式
接着,说明本发明的第五实施方式的机器人。
图14是示出本发明的第五实施方式的机器人的立体图。
图14所示的机器人1000能够进行精密仪器或构成精密仪器的部件(对象物)的供给、移除、输送和组装等的作业。机器人1000为六轴机器人,具有:固定于地板或天花板的基座1010;转动自由地连结于基座1010的臂1020;转动自由地连结于臂1020的臂1030;转动自由地连结于臂1030的臂1040;转动自由地连结于臂1040的臂1050;转动自由地连结于臂1050的臂1060;转动自由地连结于臂1060的臂1070;以及控制这些臂1020、1030、1040、1050、1060、1070的驱动的机器人控制部1080。另外,在臂1070上设置有手连接部,在手连接部上安装有对应于使机器人1000执行的作业的端执行器1090。另外,在各关节部中的全部或一部分上装配有压电电动机100(驱动装置1),在该压电电动机100的驱动下,各臂1020、1030、1040、1050、1060、1070转动。需要说明的是,各压电电动机100的驱动被机器人控制部1080控制。
这样的机器人1000具备压电电动机100(驱动装置1)。因此,能够获得上述驱动装置1的效果,能够发挥优异的可靠性。
第六实施方式
接着,说明本发明的第六实施方式的电子部件输送装置。
图15是示出本发明的第六实施方式的电子部件输送装置的立体图。图16是示出图15所示的电子部件输送装置所具有的电子部件保持部的立体图。需要说明的是,以下,为了方便说明,将相互正交的三个轴设为X轴、Y轴和Z轴。
图15所示的电子部件输送装置2000应用于电子部件检查装置,具有底座2100和配置于底座2100的侧面的支撑台2200。另外,在底座2100上设置有上游侧载物台2110、下游侧载物台2120及位于上游侧载物台2110和下游侧载物台2120之间的检查台2130,待检查的电子部件Q载置于上游侧载物台2110而沿Y轴方向输送,检查完毕的电子部件Q载置于下游侧载物台2120而沿Y轴方向输送,检查台2130检测电子部件Q的电气特性。需要说明的是,作为电子部件Q的例子,可列举出例如半导体、半导体晶片、CLD或OLED等的显示设备、水晶器件、各种传感器、喷墨头、各种MEMS器件等。
另外,在支撑台2200上设置有相对于支撑台2200能够在Y轴方向上移动的Y载物台2210,在Y载物台2210上设置有相对于Y载物台2210能够在X轴方向上移动的X载物台2220,在X载物台2220上设置有相对于X载物台2220能够在Z轴方向上移动的电子部件保持部2230。另外,如图16所示,电子部件保持部2230具有:能够在X轴方向和Y轴方向上移动的微调整板2231;相对于微调整板2231能够绕Z轴转动的转动部2232;以及设置于转动部2232、以保持电子部件Q的保持部2233。另外,在电子部件保持部2230中内置有:用于使微调整板2231在X轴方向上移动的驱动装置1(1x);用于使微调整板2231在Y轴方向上移动的驱动装置1(1y);用于使转动部2232绕Z轴转动的驱动装置1(1θ)。
这样的电子部件输送装置2000具备驱动装置1。因此,能够获得上述驱动装置1的效果,能够发挥优异的可靠性。
第七实施方式
接着,说明本发明的第七实施方式的打印机。
图17是示出本发明的第七实施方式的打印机的整体构成的概略图。
图17所示的打印机3000具备装置主体3010以及设置于装置主体3010内部的印刷机构3020、供纸机构3030和控制部3040。
在装置主体3010内设置有:设置记录纸张P的托盘3011;排出记录纸张P的排纸口3012;以及设置液晶显示器等的操作面板3013。
印刷机构3020具备头单元3021、滑架电动机3022以及通过滑架电动机3022的驱动力使头单元3021往复移动的往复移动机构3023。
头单元3021具有:作为喷墨式记录头的头3021a;向头3021a供给油墨的墨盒3021b;以及安装有头3021a和墨盒3021b的滑架3021c。
往复移动机构3023具有:以能够往复移动的方式支撑滑架3021c的滑架引导轴3023a;以及通过滑架电动机3022的驱动力使滑架3021c在滑架引导轴3023a上移动的正时皮带3023b。
供纸机构3030具有:相互压接的从动辊3031和驱动辊3032;以及作为驱动驱动辊3032的供纸电动机的压电电动机100(驱动装置1)。
控制部3040根据从例如个人计算机等的主计算机输入的印刷数据,控制印刷机构3020、供纸机构3030等。
在这样的打印机3000中,供纸机构3030将记录纸张P逐张间歇地输送至头单元3021的下部附近。这时,头单元3021在与记录纸张P的输送方向大致正交的方向上往复移动,对记录纸张P进行印刷。
这样的打印机3000具备压电电动机100(驱动装置1)。因此,能够获得上述驱动装置1的效果,能够发挥优异的可靠性。需要说明的是,在本实施方式中,压电电动机100驱动供纸用的驱动辊3032,除此之外,例如还可以驱动滑架3021c。
以上根据图示的实施方式说明了本发明的驱动装置、压电电动机、机器人、电子部件输送装置及打印机,但本发明并不限定于此,各部分的构成可以置换为具有同样功能的任意构成。另外,也可以对本发明添加其他任意构成物。另外,也可以适当组合各实施方式。
另外,在上述实施方式中,对将驱动装置应用于压电电动机、机器人、电子部件输送装置及打印机的构成进行了说明,但驱动装置也可以应用于除此之外的各种电子器件。
Claims (10)
1.一种驱动装置,其特征在于,具有:
多个振动体,每个振动体具有将振动传递至被驱动部的传递部;以及
控制部,使多个所述振动体的所述传递部的振动轨迹分别独立地改变,
多个所述振动体的所述传递部的振动轨迹彼此不同,
并且多个所述振动体在所述被驱动部的驱动方向上并排且相互分开配置;
当将所述被驱动部和所述振动体排列的方向设为第一方向,将正交于所述第一方向的方向设为第二方向时,多个所述振动体具有在所述第一方向和所述第二方向中的至少一个方向上的振幅不同的多个振动模式,所述控制部按多个所述振动模式中的任一个振动模式驱动多个所述振动体;
多个所述振动模式包括第一振动模式和第三振动模式,在所述第一振动模式中,所述传递部在所述第一方向和所述第二方向上具有振幅,在所述第三振动模式中,所述传递部在所述第一方向上的振幅小于所述第一振动模式中的振幅。
2.根据权利要求1所述的驱动装置,其特征在于,
多个所述振动模式包括第一振动模式和第二振动模式,在所述第一振动模式中,所述传递部在所述第一方向和所述第二方向上具有振幅,在所述第二振动模式中,所述传递部在所述第二方向上的振幅小于所述第一振动模式中的振幅。
3.根据权利要求2所述的驱动装置,其特征在于,
所述控制部根据所述被驱动部的驱动速度改变所述传递部按所述第一振动模式振动的所述振动体的个数。
4.根据权利要求3所述的驱动装置,其特征在于,
当所述被驱动部的驱动速度变大时,所述控制部增加所述传递部按所述第一振动模式振动的所述振动体的个数。
5.根据权利要求1所述的驱动装置,其特征在于,
所述振动体具有压电体。
6.根据权利要求5所述的驱动装置,其特征在于,
所述振动体具有层叠的多个所述压电体。
7.一种压电电动机,其特征在于,具备:权利要求1所述的驱动装置。
8.一种机器人,其特征在于,具备:权利要求1所述的驱动装置。
9.一种电子部件输送装置,其特征在于,具备:权利要求1所述的驱动装置。
10.一种打印机,其特征在于,具备:权利要求1所述的驱动装置。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016-211052 | 2016-10-27 | ||
| JP2016211052A JP2018074723A (ja) | 2016-10-27 | 2016-10-27 | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN108011541A CN108011541A (zh) | 2018-05-08 |
| CN108011541B true CN108011541B (zh) | 2021-11-12 |
Family
ID=62022625
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710843931.1A Active CN108011541B (zh) | 2016-10-27 | 2017-09-18 | 驱动装置、压电电动机、机器人、部件输送装置及打印机 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10811998B2 (zh) |
| JP (1) | JP2018074723A (zh) |
| CN (1) | CN108011541B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7205163B2 (ja) * | 2018-10-30 | 2023-01-17 | セイコーエプソン株式会社 | 圧電駆動装置の制御方法、圧電駆動装置、ロボットおよびプリンター |
| JP7205162B2 (ja) * | 2018-10-30 | 2023-01-17 | セイコーエプソン株式会社 | 圧電駆動装置、ロボットおよびプリンター |
| CN110492785A (zh) * | 2019-08-09 | 2019-11-22 | 南京航空航天大学 | 一种十字梁旋转型超声电机及其控制方法 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1913322A (zh) * | 2006-08-28 | 2007-02-14 | 哈尔滨工业大学 | 换能器耦合双向直线超声波电机及其激励方法 |
| CN101672972A (zh) * | 2008-09-10 | 2010-03-17 | 索尼株式会社 | 透镜驱动器和图像拾取设备 |
| CN102447415A (zh) * | 2010-09-30 | 2012-05-09 | 株式会社尼康 | 压电促动器、透镜镜筒及摄像装置 |
| JP2013183461A (ja) * | 2012-02-29 | 2013-09-12 | Nikon Corp | 駆動装置、レンズ鏡筒及びカメラ |
Family Cites Families (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04145873A (ja) * | 1990-10-02 | 1992-05-19 | Olympus Optical Co Ltd | 超音波モータ |
| JPH04178181A (ja) * | 1990-11-09 | 1992-06-25 | Olympus Optical Co Ltd | 超音波モータ |
| JP2004260990A (ja) * | 2003-02-06 | 2004-09-16 | Seiko Epson Corp | 駆動装置および稼動装置 |
| JP2006352989A (ja) * | 2005-06-15 | 2006-12-28 | Olympus Corp | 超音波モータの駆動装置及びその方法並びに超音波システム |
| WO2010113505A1 (ja) * | 2009-03-31 | 2010-10-07 | 株式会社ニコン | 圧電アクチュエータ及びレンズ鏡筒 |
| JP5212397B2 (ja) * | 2010-02-12 | 2013-06-19 | セイコーエプソン株式会社 | 圧電アクチュエータ |
| JP5791237B2 (ja) * | 2010-06-14 | 2015-10-07 | キヤノン株式会社 | 振動型駆動装置 |
| JP6103840B2 (ja) * | 2011-07-28 | 2017-03-29 | キヤノン株式会社 | 補正光学装置及び撮像装置 |
| JP6008077B2 (ja) * | 2011-12-06 | 2016-10-19 | セイコーエプソン株式会社 | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 |
| JP5929139B2 (ja) * | 2011-12-06 | 2016-06-01 | セイコーエプソン株式会社 | アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター |
| JP5929138B2 (ja) * | 2011-12-06 | 2016-06-01 | セイコーエプソン株式会社 | 圧電モーターおよびロボット |
| JP6214193B2 (ja) * | 2012-06-05 | 2017-10-18 | キヤノン株式会社 | 振動波駆動装置、二次元駆動装置、画像振れ補正装置、交換レンズ、撮像装置、及び自動ステージ |
| JP2014075955A (ja) | 2012-10-05 | 2014-04-24 | Nikon Corp | 駆動装置、ロボット装置及び露光装置 |
| JP6053535B2 (ja) * | 2013-01-25 | 2016-12-27 | キヤノン株式会社 | 補正光学装置、画像振れ補正装置、及び撮像装置 |
| JP6268999B2 (ja) * | 2013-12-06 | 2018-01-31 | セイコーエプソン株式会社 | 圧電モーター、ロボットハンド、ロボット、指アシスト装置、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置 |
| JP6387686B2 (ja) * | 2014-05-29 | 2018-09-12 | セイコーエプソン株式会社 | 圧電アクチュエーター |
| JP2017073890A (ja) * | 2015-10-07 | 2017-04-13 | キヤノン株式会社 | 並進駆動装置、像ぶれ補正装置、レンズ鏡筒及び撮像装置 |
-
2016
- 2016-10-27 JP JP2016211052A patent/JP2018074723A/ja not_active Withdrawn
-
2017
- 2017-09-18 CN CN201710843931.1A patent/CN108011541B/zh active Active
- 2017-10-12 US US15/782,226 patent/US10811998B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1913322A (zh) * | 2006-08-28 | 2007-02-14 | 哈尔滨工业大学 | 换能器耦合双向直线超声波电机及其激励方法 |
| CN101672972A (zh) * | 2008-09-10 | 2010-03-17 | 索尼株式会社 | 透镜驱动器和图像拾取设备 |
| CN102447415A (zh) * | 2010-09-30 | 2012-05-09 | 株式会社尼康 | 压电促动器、透镜镜筒及摄像装置 |
| JP2013183461A (ja) * | 2012-02-29 | 2013-09-12 | Nikon Corp | 駆動装置、レンズ鏡筒及びカメラ |
Also Published As
| Publication number | Publication date |
|---|---|
| US10811998B2 (en) | 2020-10-20 |
| CN108011541A (zh) | 2018-05-08 |
| US20180123483A1 (en) | 2018-05-03 |
| JP2018074723A (ja) | 2018-05-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10680156B2 (en) | Piezoelectric actuator, piezoelectric motor, robot, electronic component conveyance apparatus, printer, and manufacturing method of piezoelectric actuator | |
| CN108011541B (zh) | 驱动装置、压电电动机、机器人、部件输送装置及打印机 | |
| JP2016182016A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| CN110784122B (zh) | 压电驱动装置、机器人以及打印机 | |
| US11205973B2 (en) | Method of controlling piezoelectric drive device, method of controlling robot, and method of controlling printer | |
| CN111130381B (zh) | 压电驱动装置、机器人以及打印机 | |
| US11349062B2 (en) | Piezoelectric drive device, robot, and printer | |
| CN108696174B (zh) | 驱动装置及方法、机器人、输送装置、打印机及投影仪 | |
| CN110266211B (zh) | 压电驱动装置、机器人、电子部件输送装置、打印机 | |
| JP2018037507A (ja) | 振動子、圧電アクチュエーター、圧電モーター、ロボットおよび電子部品搬送装置 | |
| JP2018074011A (ja) | 圧電駆動装置、圧電モーター、ロボット、電子部品搬送装置、プリンターおよび圧電駆動装置の製造方法 | |
| JP2019146435A (ja) | 圧電駆動装置、圧電アクチュエーターの制御方法、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2020191767A (ja) | 圧電アクチュエーター及びロボット | |
| CN111865136B (zh) | 压电驱动装置的控制方法、压电驱动装置及机器人 | |
| JP4844204B2 (ja) | 記録装置、液体噴射装置および駆動機構 | |
| JP2007260981A (ja) | 記録装置および液体噴射装置 | |
| JP2017103955A (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP2018074773A (ja) | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター | |
| JP2019146365A (ja) | 圧電アクチュエーター、圧電駆動装置、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP4844203B2 (ja) | 記録装置 | |
| JP2020137276A (ja) | 圧電駆動装置の制御方法、圧電駆動装置およびロボット | |
| CN111130386A (zh) | 压电驱动装置及其控制方法、机器人及打印机 | |
| JP2019162027A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP2007237688A (ja) | 記録装置、液体噴射装置および回転駆動機構 | |
| JP2007254098A (ja) | 記録装置、アクチュエータおよび液体噴射装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |