JP6008077B2 - アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 - Google Patents
アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 Download PDFInfo
- Publication number
- JP6008077B2 JP6008077B2 JP2011266546A JP2011266546A JP6008077B2 JP 6008077 B2 JP6008077 B2 JP 6008077B2 JP 2011266546 A JP2011266546 A JP 2011266546A JP 2011266546 A JP2011266546 A JP 2011266546A JP 6008077 B2 JP6008077 B2 JP 6008077B2
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric element
- support
- vibration
- support portion
- region
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000007689 inspection Methods 0.000 title claims description 35
- 238000012546 transfer Methods 0.000 title description 6
- 238000005452 bending Methods 0.000 claims description 48
- 238000003825 pressing Methods 0.000 claims description 6
- 239000000758 substrate Substances 0.000 claims description 4
- 239000000463 material Substances 0.000 description 34
- 230000033001 locomotion Effects 0.000 description 33
- 238000003384 imaging method Methods 0.000 description 18
- 238000005520 cutting process Methods 0.000 description 15
- 238000006243 chemical reaction Methods 0.000 description 13
- 238000000034 method Methods 0.000 description 6
- 238000006073 displacement reaction Methods 0.000 description 4
- 239000000523 sample Substances 0.000 description 4
- 239000000853 adhesive Substances 0.000 description 3
- 230000001070 adhesive effect Effects 0.000 description 3
- 239000004642 Polyimide Substances 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 229920001971 elastomer Polymers 0.000 description 2
- 230000002401 inhibitory effect Effects 0.000 description 2
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 230000010355 oscillation Effects 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 230000002829 reductive effect Effects 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 239000004695 Polyether sulfone Substances 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 239000003522 acrylic cement Substances 0.000 description 1
- 239000004840 adhesive resin Substances 0.000 description 1
- 229920006223 adhesive resin Polymers 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 239000000919 ceramic Substances 0.000 description 1
- 239000011248 coating agent Substances 0.000 description 1
- 238000000576 coating method Methods 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 239000013078 crystal Substances 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 239000000806 elastomer Substances 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000005286 illumination Methods 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000005259 measurement Methods 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 229920006393 polyether sulfone Polymers 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 239000005060 rubber Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 238000004904 shortening Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 238000007740 vapor deposition Methods 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/0009—Gripping heads and other end effectors comprising multi-articulated fingers, e.g. resembling a human hand
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/04—Constructional details
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/88—Mounts; Supports; Enclosures; Casings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0206—Gripping heads and other end effectors servo-actuated comprising articulated grippers
- B25J15/024—Gripping heads and other end effectors servo-actuated comprising articulated grippers having fingers directly connected to actuator
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/0015—Driving devices, e.g. vibrators using only bending modes
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
- H02N2/004—Rectangular vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/005—Mechanical details, e.g. housings
- H02N2/0055—Supports for driving or driven bodies; Means for pressing driving body against driven body
- H02N2/006—Elastic elements, e.g. springs
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/028—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors along multiple or arbitrary translation directions, e.g. XYZ stages
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/108—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors around multiple axes of rotation, e.g. spherical rotor motors
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/204—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using bending displacement, e.g. unimorph, bimorph or multimorph cantilever or membrane benders
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B41—PRINTING; LINING MACHINES; TYPEWRITERS; STAMPS
- B41J—TYPEWRITERS; SELECTIVE PRINTING MECHANISMS, i.e. MECHANISMS PRINTING OTHERWISE THAN FROM A FORME; CORRECTION OF TYPOGRAPHICAL ERRORS
- B41J19/00—Character- or line-spacing mechanisms
- B41J19/18—Character-spacing or back-spacing mechanisms; Carriage return or release devices therefor
- B41J19/20—Positive-feed character-spacing mechanisms
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/30—End effector
- Y10S901/31—Gripping jaw
- Y10S901/32—Servo-actuated
Description
D1≦0.13L
D2≦0.13L
であり、且つ前記第1支持領域は前記振動の節P1を含み、前記第2支持領域は前記振動の節P2を含むことを特徴とする。
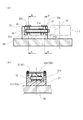
図1は、第1実施形態のアクチュエーターを示し、(a)は平面図、(b)は(a)に示すA−A´部の断面図、(c)は(a)に示すB−B´部およびC−C´部の断面図、である。図1(a)に示すように、アクチュエーター100は、保持部材としての保持ケース20と、保持ケース20に保持される圧電素子10と、保持ケース20の付勢手段としてのばね60が装着されるばね固定部50aを備える基台50と、被駆動体71もしくは被駆動体72と、を備えている。
LP1≒0.13L
LP2≒0.13L
であることが得られた。このことから、第1支持領域30の図心Q1と節P1との距離D1、第2支持領域40の図心Q2と節P2との距離D2、は、
D1≦0.13L
D2≦0.13L
であることが好ましく、D1およびD2を0に近づけることがなお好ましい。更に、第1支持領域30の領域内には節P1が含まれ、第2支持領域40の領域内には節P2が含まれていることが好ましい。このように支持領域30,40を形成することにより、支持部31,32,41,42によって圧電素子10が挟持、保持されても、圧電素子10の屈曲振動の妨げになることが回避でき、保持ケース20への振動の漏れを抑制することができる。
δ11>0,δ12>0,δK1>0
である。すなわち、圧電素子10の外形部に第1支持領域30の外形部が重ならないように形成する。
LK1<LP31
とする。
δ21>0,δ22>0,δK2>0
である。すなわち、圧電素子10の外形部に第2支持領域40の外形部が重ならないように形成され、第2支持領域40のL方向の第1支持領域30側の位置LK2は、圧電素子10の中央部の節P3位置LP32に対して、
LK2<LP32
とする。すなわち、第1支持領域30と第2支持領域40は、節P3を挟んで離間している。このように支持領域30,40を設定することにより、支持部31,32,41,42によって圧電素子10が挟持、保持されても、圧電素子10の屈曲振動の妨げになることが回避できる。
図9に第2実施形態に係るアクチュエーターの支持部である、図1(a)に指示するB−B´部、およびC−C´部の概略断面図を示す。なお、第2実施形態に係るアクチュエーターは第1実施形態に係るアクチュエーター100に対して支持部31,32,41,42に弾性部材を含む点が異なり、その他の構成は同じであるため、第1実施形態に係るアクチュエーター100と同じ構成には同じ符号を付し、説明は省略する。
図10は、第1実施形態に係るアクチュエーター100または300を備えたロボットハンド1000を示す外観図である。図10に示すロボットハンド1000に備えるアクチュエーター100は、第1実施形態に係るアクチュエーター100であって、回転駆動される被駆動体71を備えている(図1参照)形態をとり、後述するロボットハンド1000の関節部の回転駆動モーターとして用いられる。ロボットハンド1000は、基部1100に接続された指部1200を備えている。基部1100と指部1200との接続部1300と、指部1200の関節部1400とには、回転駆動モーターとしてのアクチュエーター100が組み込まれている。またロボットハンド1000には制御部1500を備え、制御部1500によってアクチュエーター100の駆動により接続部1300および関節部1400を回動させ指部1200を人間の指のように所望の形態に変形させることができる。
図11は、第3実施形態に係るロボットハンド1000備えるロボット2000の構成を示す外観図である。ロボット2000は、本体部2100、アーム部2200およびロボットハンド1000を備え、図示するロボット2000は、いわゆる多関節型ロボットに分類される。本体部2100は、例えば床、壁、天井、移動可能な台車の上などに固定される。アーム部2200は、本体部2100に対して可動に設けられており、本体部2100にはアーム部2200を回転させるための動力を発生させる図示しないアクチュエーターや、アクチュエーターを制御する制御部等が内蔵されている。
図12は、第1実施形態に係るアクチュエーター100を備える、直交ロボットの一実施形態としての電子部品搬送ロボットを備える電子部品検査装置を示す外観図である。図12に示す電子部品検査装置5000(以下、検査装置5000という)は、電子部品の電気的特性を検査する機能を有する部分3000(以下、検査部3000という)と、電子部品を所定の位置間を搬送する電子部品搬送ロボットとしての搬送装置部分4000(以下、搬送装置部4000という)と、を備える装置である。
図13は第5実施形態に係るプリンターを示し、(a)はプリンターを示す斜視図、(b)は(a)に示すプリンターが備えるカッティングヘッドを示す平面図、である。
Claims (7)
- 屈曲振動モードが励振されて振動し、または前記屈曲振動モードと縦振動モードとが励振されて振動する圧電素子と、
前記圧電素子に備える接触部が接触し、前記接触部の振動によって駆動される被駆動体と、
前記圧電素子を保持し、ケース本体と、前記ケース本体にねじによって固定される押え板とを有する保持部材と、
前記保持部材を前記被駆動体へ付勢する付勢手段を有する基台と、を備え、
前記保持部材は、前記圧電素子の振動面に交差する方向に配置され、前記圧電素子と前記押え板との間に配置される第1支持部および第2支持部、前記第1支持部に前記圧電素子を介して対向して前記圧電素子と前記ケース本体との間に配置される第3支持部、および前記第2支持部に前記圧電素子を介して対向して前記圧電素子と前記ケース本体との間に配置される第4支持部、を有し、
前記第1支持部および前記第2支持部は前記付勢する方向に沿って配置され、
前記第3支持部および前記第4支持部は前記付勢する方向に沿って配置され、
前記第1支持部、前記第2支持部、前記第3支持部および前記第4支持部の、前記付勢する方向の長さは、前記付勢する方向に直交かつ前記振動面に平行な方向の長さより短い、
ことを特徴とするアクチュエーター。 - 前記圧電素子は、前記屈曲振動モードの屈曲振動方向に直交する方向に沿った長さをL、前記屈曲振動方向に沿った長さをW、とする矩形基板であり、前記第1支持部と前記第3支持部と、が前記圧電素子を支持する第1支持領域と、前記第2支持部と前記第4支持部と、が前記圧電素子を支持する第2支持領域と、を有し、
前記第1支持領域の第1図心Q1と、前記圧電素子の前記長さL方向の一方の端部に最も近い振動の節P1と、の距離を距離D1とし、
前記第2支持領域の第2図心Q2と、前記圧電素子の前記長さL方向の他方の端部に最も近い振動の節P2と、の距離を距離D2とした場合の、
前記距離D1および前記距離D2が、
D1≦0.13L
D2≦0.13Lであり、且つ前記第1支持領域は前記振動の節P1を含み、前記第2支持領域は前記振動の節P2を含む、
ことを特徴とする請求項1に記載のアクチュエーター。 - 前記第1支持領域および前記第2支持領域の外縁部は、前記圧電素子の振動面の外縁部の内側である、
ことを特徴とする請求項2に記載のアクチュエーター。 - 前記第1支持領域および前記第2支持領域の少なくとも一方が矩形である、
ことを特徴とする請求項2または3に記載のアクチュエーター。 - 請求項1から4のいずれか一項に記載のアクチュエーターを備えるロボット。
- 請求項1から4のいずれか一項に記載のアクチュエーターを備える電子部品搬送装置。
- 請求項1から4のいずれか一項に記載のアクチュエーターを備える電子部品検査装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011266546A JP6008077B2 (ja) | 2011-12-06 | 2011-12-06 | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 |
| EP12195452.3A EP2602928A3 (en) | 2011-12-06 | 2012-12-04 | Actuator, robot hand, robot, electronic component carrying device, electronic component inspection device, and printer |
| CN2012105148203A CN103151951A (zh) | 2011-12-06 | 2012-12-04 | 促动器、机器手、机器人、电子部件输送装置及打印机 |
| US13/705,447 US9391257B2 (en) | 2011-12-06 | 2012-12-05 | Actuator, robot hand, robot, electronic component carrying device, electronic component inspection device, and printer |
| KR1020120140268A KR20130063471A (ko) | 2011-12-06 | 2012-12-05 | 액튜에이터, 로봇 핸드, 로봇, 전자 부품 반송 장치, 전자 부품 검사 장치 및 프린터 |
| TW101145869A TW201324884A (zh) | 2011-12-06 | 2012-12-06 | 致動器、機器人手部、機器人、電子零件搬送裝置、電子零件檢查裝置及印表機 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011266546A JP6008077B2 (ja) | 2011-12-06 | 2011-12-06 | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2013121190A JP2013121190A (ja) | 2013-06-17 |
| JP2013121190A5 JP2013121190A5 (ja) | 2015-01-15 |
| JP6008077B2 true JP6008077B2 (ja) | 2016-10-19 |
Family
ID=47623803
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011266546A Expired - Fee Related JP6008077B2 (ja) | 2011-12-06 | 2011-12-06 | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US9391257B2 (ja) |
| EP (1) | EP2602928A3 (ja) |
| JP (1) | JP6008077B2 (ja) |
| KR (1) | KR20130063471A (ja) |
| CN (1) | CN103151951A (ja) |
| TW (1) | TW201324884A (ja) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| ES2625283T3 (es) * | 2011-07-19 | 2017-07-19 | Mauser-Werke Oberndorf Maschinenbau Gmbh | Sistema de reajuste |
| KR102177156B1 (ko) | 2014-03-10 | 2020-11-10 | 삼성전자주식회사 | 로봇 및 그를 구비한 기판 처리 장치 |
| CN105538288B (zh) * | 2014-10-22 | 2020-08-28 | 精工爱普生株式会社 | 机器人 |
| CN104538547B (zh) * | 2014-12-30 | 2017-06-30 | 西安工业大学 | 压电陶瓷传感器振子 |
| JP6519207B2 (ja) * | 2015-02-02 | 2019-05-29 | セイコーエプソン株式会社 | 圧電素子駆動回路、及び、ロボット |
| CN106253742B (zh) * | 2015-06-12 | 2019-07-12 | 精工爱普生株式会社 | 马达用压电驱动装置、马达、机器人以及泵 |
| JP6601174B2 (ja) * | 2015-11-13 | 2019-11-06 | セイコーエプソン株式会社 | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ |
| CN105680718B (zh) * | 2016-04-11 | 2017-08-25 | 哈尔滨工业大学 | 蛙型一阶纵振直线超声电机 |
| JP2018074723A (ja) * | 2016-10-27 | 2018-05-10 | セイコーエプソン株式会社 | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター |
| DE102017102663B4 (de) * | 2017-02-10 | 2019-05-29 | Physik Instrumente (Pi) Gmbh & Co. Kg | Piezomotor |
| JP6957322B2 (ja) | 2017-11-27 | 2021-11-02 | キヤノン株式会社 | 振動型モータ、レンズ装置、および、電子機器 |
| CN109514594A (zh) * | 2018-11-29 | 2019-03-26 | 南京航空航天大学 | 一种基于球形关节的压电机械手及其控制方法 |
| US20220216851A1 (en) * | 2019-05-10 | 2022-07-07 | Miniswys Sa | Drive unit and method for operating a drive unit |
| KR102510929B1 (ko) * | 2020-04-23 | 2023-03-15 | 세메스 주식회사 | 하중 분산 장치 및 이를 구비하는 기판 처리 시스템 |
| JP2022011405A (ja) * | 2020-06-30 | 2022-01-17 | セイコーエプソン株式会社 | 圧電駆動装置、圧電モーターおよびロボット |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5136200A (en) * | 1989-07-27 | 1992-08-04 | Olympus Optical Co., Ltd. | Ultransonic motor |
| IL106296A0 (en) | 1993-07-09 | 1993-12-28 | Nanomotion Ltd | Ceramic motor |
| US5616980A (en) | 1993-07-09 | 1997-04-01 | Nanomotion Ltd. | Ceramic motor |
| JPH0739178A (ja) | 1993-07-20 | 1995-02-07 | Matsushita Electric Ind Co Ltd | 超音波アクチュエータ |
| US5682076A (en) | 1993-08-03 | 1997-10-28 | Nanomotion Ltd. | Ceramic disc-drive actuator |
| IL114656A0 (en) * | 1995-07-18 | 1995-11-27 | Nanomotion Ltd | Ceramic motor |
| JPH08168278A (ja) * | 1994-12-16 | 1996-06-25 | Tamura Electric Works Ltd | リニア型超音波アクチュエータ |
| JP3184117B2 (ja) * | 1997-05-23 | 2001-07-09 | セイコーインスツルメンツ株式会社 | 超音波モータ及び超音波モータ付き電子機器 |
| DE19817038A1 (de) | 1998-04-17 | 1999-10-21 | Philips Patentverwaltung | Piezomotor |
| JP2004166479A (ja) * | 2002-06-14 | 2004-06-10 | Seiko Epson Corp | 回転型駆動装置およびこれを備えた装置 |
| JP2004187384A (ja) | 2002-12-02 | 2004-07-02 | Nsk Ltd | 振動アクチュエータ |
| JP2004298973A (ja) * | 2003-03-28 | 2004-10-28 | Nsk Ltd | 超音波駆動装置及び案内装置 |
| JP2006008367A (ja) * | 2004-06-29 | 2006-01-12 | Mitsubishi Electric Corp | エレベータの制御装置 |
| JP2007318997A (ja) | 2005-12-05 | 2007-12-06 | Matsushita Electric Ind Co Ltd | 超音波アクチュエータ |
| WO2007066633A1 (ja) * | 2005-12-05 | 2007-06-14 | Matsushita Electric Industrial Co., Ltd. | 超音波アクチュエータ |
| US7663292B2 (en) * | 2006-01-12 | 2010-02-16 | Panasonic Corporation | Ultrasonic actuator |
| JP2007221865A (ja) | 2006-02-14 | 2007-08-30 | Seiko Epson Corp | 圧電振動体、圧電振動体の固有振動数調整方法、圧電アクチュエータ、および電子機器 |
| WO2008093799A1 (ja) | 2007-02-02 | 2008-08-07 | Panasonic Corporation | 超音波アクチュエータ |
| JP2008218953A (ja) * | 2007-03-08 | 2008-09-18 | Seiko Epson Corp | 圧電振動体、電子機器、圧電振動体の製造方法 |
| JP4245183B2 (ja) | 2007-04-23 | 2009-03-25 | セイコーインスツル株式会社 | 超音波モータ及び超音波モータ付電子機器 |
| JP4294061B2 (ja) * | 2007-04-23 | 2009-07-08 | セイコーインスツル株式会社 | 超音波モータ及び超音波モータ付電子機器 |
| JP2009017735A (ja) | 2007-07-06 | 2009-01-22 | Olympus Corp | 超音波モータ |
| JP4802313B2 (ja) | 2008-08-01 | 2011-10-26 | ニッコー株式会社 | 圧電振動子の保持装置 |
| JP5244727B2 (ja) * | 2009-07-27 | 2013-07-24 | パナソニック株式会社 | 振動型アクチュエータ |
| CN102092049B (zh) * | 2011-01-04 | 2013-02-13 | 天津大学 | 具有可变形状手掌的仿人灵巧手 |
-
2011
- 2011-12-06 JP JP2011266546A patent/JP6008077B2/ja not_active Expired - Fee Related
-
2012
- 2012-12-04 EP EP12195452.3A patent/EP2602928A3/en not_active Withdrawn
- 2012-12-04 CN CN2012105148203A patent/CN103151951A/zh active Pending
- 2012-12-05 US US13/705,447 patent/US9391257B2/en not_active Expired - Fee Related
- 2012-12-05 KR KR1020120140268A patent/KR20130063471A/ko not_active Application Discontinuation
- 2012-12-06 TW TW101145869A patent/TW201324884A/zh unknown
Also Published As
| Publication number | Publication date |
|---|---|
| EP2602928A2 (en) | 2013-06-12 |
| US20130140954A1 (en) | 2013-06-06 |
| TW201324884A (zh) | 2013-06-16 |
| KR20130063471A (ko) | 2013-06-14 |
| JP2013121190A (ja) | 2013-06-17 |
| EP2602928A3 (en) | 2014-09-10 |
| CN103151951A (zh) | 2013-06-12 |
| US9391257B2 (en) | 2016-07-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6008077B2 (ja) | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 | |
| JP5929139B2 (ja) | アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置およびプリンター | |
| JP5953724B2 (ja) | 圧電モーター、駆動装置、ロボット、電子部品搬送装置、電子部品検査装置、プリンター | |
| JP5978907B2 (ja) | 圧電アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置、搬送装置 | |
| US20130141716A1 (en) | Piezoelectric motor, driving device, electronic component conveying device, electronic component inspection device, printing device, robot hand, and robot | |
| JP6214232B2 (ja) | 振動型アクチュエータ、交換用レンズ、撮像装置、及び自動ステージ | |
| US20130255427A1 (en) | Piezoelectric motor, robot hand, and robot | |
| CN103684036A (zh) | 压电马达、机器人手、机器人、电子部件搬运装置、电子部件检查装置、送液泵、打印装置 | |
| JP5958013B2 (ja) | アクチュエーターおよびロボット | |
| JP2014007917A (ja) | 圧電アクチュエーターの駆動方法、圧電アクチュエーター、ロボットハンド、ロボット、搬送装置、電子部品搬送装置および電子部品検査装置 | |
| JPWO2002015378A1 (ja) | 折り重なり式圧電ステータ、折り重なり式圧電アクチュエータ及びそれらの応用 | |
| JP7103019B2 (ja) | 圧電駆動装置、ロボットおよびプリンター | |
| JP6127379B2 (ja) | アクチュエーター、ロボットハンド、ロボット、搬送装置、電子部品搬送装置および電子部品検査装置 | |
| JP2018074723A (ja) | 駆動装置、圧電モーター、ロボット、電子部品搬送装置およびプリンター | |
| JP2014079135A (ja) | 圧電アクチュエーター、ロボットハンド、ロボット、電子部品搬送装置、電子部品検査装置、送液ポンプ、印刷装置、電子時計、投影装置、搬送装置 | |
| US9065036B2 (en) | Vibration-type driving apparatus and image pickup apparatus | |
| TWI585020B (zh) | Conveyance device, electronic parts transfer device and electronic parts inspection device | |
| JP7272177B2 (ja) | 圧電駆動装置およびロボット | |
| JP2019146435A (ja) | 圧電駆動装置、圧電アクチュエーターの制御方法、ロボット、電子部品搬送装置、プリンターおよびプロジェクター | |
| JP2022112669A (ja) | 圧電駆動装置およびロボット | |
| JP2022011405A (ja) | 圧電駆動装置、圧電モーターおよびロボット | |
| CN115224973A (zh) | 压电驱动装置以及机器人 | |
| JP2007253365A (ja) | 記録装置、液体噴射装置および回転駆動機構 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141119 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20141119 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150107 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150901 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20160223 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160422 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160609 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160617 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20160817 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20160830 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6008077 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |