JP6601174B2 - 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ - Google Patents
圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ Download PDFInfo
- Publication number
- JP6601174B2 JP6601174B2 JP2015222564A JP2015222564A JP6601174B2 JP 6601174 B2 JP6601174 B2 JP 6601174B2 JP 2015222564 A JP2015222564 A JP 2015222564A JP 2015222564 A JP2015222564 A JP 2015222564A JP 6601174 B2 JP6601174 B2 JP 6601174B2
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric
- piezoelectric actuator
- substrates
- piezoelectric elements
- actuator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 239000007788 liquid Substances 0.000 title claims description 12
- 239000000758 substrate Substances 0.000 claims description 71
- 239000010410 layer Substances 0.000 claims description 49
- 239000012790 adhesive layer Substances 0.000 claims description 7
- PXHVJJICTQNCMI-UHFFFAOYSA-N nickel Substances [Ni] PXHVJJICTQNCMI-UHFFFAOYSA-N 0.000 description 25
- 239000000463 material Substances 0.000 description 13
- 238000010586 diagram Methods 0.000 description 12
- 238000007747 plating Methods 0.000 description 12
- 229910052759 nickel Inorganic materials 0.000 description 10
- 210000000707 wrist Anatomy 0.000 description 8
- 238000000034 method Methods 0.000 description 7
- KDLHZDBZIXYQEI-UHFFFAOYSA-N palladium Substances [Pd] KDLHZDBZIXYQEI-UHFFFAOYSA-N 0.000 description 7
- 239000011248 coating agent Substances 0.000 description 6
- 238000000576 coating method Methods 0.000 description 6
- 239000010931 gold Substances 0.000 description 6
- 238000004519 manufacturing process Methods 0.000 description 6
- 238000000059 patterning Methods 0.000 description 6
- 239000011241 protective layer Substances 0.000 description 6
- 239000010949 copper Substances 0.000 description 5
- PCHJSUWPFVWCPO-UHFFFAOYSA-N gold Chemical compound [Au] PCHJSUWPFVWCPO-UHFFFAOYSA-N 0.000 description 5
- 229910052737 gold Inorganic materials 0.000 description 5
- RYGMFSIKBFXOCR-UHFFFAOYSA-N Copper Chemical compound [Cu] RYGMFSIKBFXOCR-UHFFFAOYSA-N 0.000 description 4
- 239000000919 ceramic Substances 0.000 description 4
- 229910052802 copper Inorganic materials 0.000 description 4
- 229940079593 drug Drugs 0.000 description 4
- 239000003814 drug Substances 0.000 description 4
- 238000005530 etching Methods 0.000 description 4
- 229910052763 palladium Inorganic materials 0.000 description 4
- 239000010409 thin film Substances 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 238000001354 calcination Methods 0.000 description 3
- 239000003638 chemical reducing agent Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- -1 palladium ions Chemical class 0.000 description 3
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Substances [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 3
- 229920005989 resin Polymers 0.000 description 3
- 239000011347 resin Substances 0.000 description 3
- 238000005245 sintering Methods 0.000 description 3
- 238000000992 sputter etching Methods 0.000 description 3
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 2
- XKRFYHLGVUSROY-UHFFFAOYSA-N Argon Chemical compound [Ar] XKRFYHLGVUSROY-UHFFFAOYSA-N 0.000 description 2
- 229910001369 Brass Inorganic materials 0.000 description 2
- VEQPNABPJHWNSG-UHFFFAOYSA-N Nickel(2+) Chemical compound [Ni+2] VEQPNABPJHWNSG-UHFFFAOYSA-N 0.000 description 2
- 239000004642 Polyimide Substances 0.000 description 2
- XLOMVQKBTHCTTD-UHFFFAOYSA-N Zinc monoxide Chemical compound [Zn]=O XLOMVQKBTHCTTD-UHFFFAOYSA-N 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 239000010951 brass Substances 0.000 description 2
- 239000003054 catalyst Substances 0.000 description 2
- 230000001747 exhibiting effect Effects 0.000 description 2
- NOESYZHRGYRDHS-UHFFFAOYSA-N insulin Chemical compound N1C(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(NC(=O)CN)C(C)CC)CSSCC(C(NC(CO)C(=O)NC(CC(C)C)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CCC(N)=O)C(=O)NC(CC(C)C)C(=O)NC(CCC(O)=O)C(=O)NC(CC(N)=O)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CSSCC(NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2C=CC(O)=CC=2)NC(=O)C(CC(C)C)NC(=O)C(C)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2NC=NC=2)NC(=O)C(CO)NC(=O)CNC2=O)C(=O)NCC(=O)NC(CCC(O)=O)C(=O)NC(CCCNC(N)=N)C(=O)NCC(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC(O)=CC=3)C(=O)NC(C(C)O)C(=O)N3C(CCC3)C(=O)NC(CCCCN)C(=O)NC(C)C(O)=O)C(=O)NC(CC(N)=O)C(O)=O)=O)NC(=O)C(C(C)CC)NC(=O)C(CO)NC(=O)C(C(C)O)NC(=O)C1CSSCC2NC(=O)C(CC(C)C)NC(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CC(N)=O)NC(=O)C(NC(=O)C(N)CC=1C=CC=CC=1)C(C)C)CC1=CN=CN1 NOESYZHRGYRDHS-UHFFFAOYSA-N 0.000 description 2
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 2
- 229910001453 nickel ion Inorganic materials 0.000 description 2
- 229920001721 polyimide Polymers 0.000 description 2
- 238000003980 solgel method Methods 0.000 description 2
- 210000003857 wrist joint Anatomy 0.000 description 2
- WSMQKESQZFQMFW-UHFFFAOYSA-N 5-methyl-pyrazole-3-carboxylic acid Chemical compound CC1=CC(C(O)=O)=NN1 WSMQKESQZFQMFW-UHFFFAOYSA-N 0.000 description 1
- ZAMOUSCENKQFHK-UHFFFAOYSA-N Chlorine atom Chemical compound [Cl] ZAMOUSCENKQFHK-UHFFFAOYSA-N 0.000 description 1
- 239000004593 Epoxy Substances 0.000 description 1
- 102000004877 Insulin Human genes 0.000 description 1
- 108090001061 Insulin Proteins 0.000 description 1
- 239000002033 PVDF binder Substances 0.000 description 1
- OAICVXFJPJFONN-UHFFFAOYSA-N Phosphorus Chemical compound [P] OAICVXFJPJFONN-UHFFFAOYSA-N 0.000 description 1
- 229910004298 SiO 2 Inorganic materials 0.000 description 1
- VNSWULZVUKFJHK-UHFFFAOYSA-N [Sr].[Bi] Chemical compound [Sr].[Bi] VNSWULZVUKFJHK-UHFFFAOYSA-N 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- XAGFODPZIPBFFR-UHFFFAOYSA-N aluminium Chemical compound [Al] XAGFODPZIPBFFR-UHFFFAOYSA-N 0.000 description 1
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 1
- 229910052786 argon Inorganic materials 0.000 description 1
- 229910002113 barium titanate Inorganic materials 0.000 description 1
- JRPBQTZRNDNNOP-UHFFFAOYSA-N barium titanate Chemical compound [Ba+2].[Ba+2].[O-][Ti]([O-])([O-])[O-] JRPBQTZRNDNNOP-UHFFFAOYSA-N 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 239000000460 chlorine Substances 0.000 description 1
- 229910052801 chlorine Inorganic materials 0.000 description 1
- 230000008602 contraction Effects 0.000 description 1
- 238000009770 conventional sintering Methods 0.000 description 1
- NKZSPGSOXYXWQA-UHFFFAOYSA-N dioxido(oxo)titanium;lead(2+) Chemical compound [Pb+2].[O-][Ti]([O-])=O NKZSPGSOXYXWQA-UHFFFAOYSA-N 0.000 description 1
- 238000001312 dry etching Methods 0.000 description 1
- 239000000428 dust Substances 0.000 description 1
- 230000005684 electric field Effects 0.000 description 1
- 239000007789 gas Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 239000012212 insulator Substances 0.000 description 1
- 229940125396 insulin Drugs 0.000 description 1
- 238000010884 ion-beam technique Methods 0.000 description 1
- 229910052741 iridium Inorganic materials 0.000 description 1
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical compound [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 1
- 238000010030 laminating Methods 0.000 description 1
- 238000003475 lamination Methods 0.000 description 1
- JQJCSZOEVBFDKO-UHFFFAOYSA-N lead zinc Chemical compound [Zn].[Pb] JQJCSZOEVBFDKO-UHFFFAOYSA-N 0.000 description 1
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 1
- GQYHUHYESMUTHG-UHFFFAOYSA-N lithium niobate Chemical compound [Li+].[O-][Nb](=O)=O GQYHUHYESMUTHG-UHFFFAOYSA-N 0.000 description 1
- 229910052751 metal Inorganic materials 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 239000011368 organic material Substances 0.000 description 1
- 230000001590 oxidative effect Effects 0.000 description 1
- 239000011574 phosphorus Substances 0.000 description 1
- 229910052698 phosphorus Inorganic materials 0.000 description 1
- 229910052697 platinum Inorganic materials 0.000 description 1
- 230000010287 polarization Effects 0.000 description 1
- 229920002981 polyvinylidene fluoride Polymers 0.000 description 1
- UKDIAJWKFXFVFG-UHFFFAOYSA-N potassium;oxido(dioxo)niobium Chemical compound [K+].[O-][Nb](=O)=O UKDIAJWKFXFVFG-UHFFFAOYSA-N 0.000 description 1
- 239000000843 powder Substances 0.000 description 1
- 239000002244 precipitate Substances 0.000 description 1
- 238000003825 pressing Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 239000010453 quartz Substances 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 238000006479 redox reaction Methods 0.000 description 1
- 229910052706 scandium Inorganic materials 0.000 description 1
- SIXSYDAISGFNSX-UHFFFAOYSA-N scandium atom Chemical compound [Sc] SIXSYDAISGFNSX-UHFFFAOYSA-N 0.000 description 1
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N silicon dioxide Inorganic materials O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 1
- 229920002050 silicone resin Polymers 0.000 description 1
- XMVONEAAOPAGAO-UHFFFAOYSA-N sodium tungstate Chemical compound [Na+].[Na+].[O-][W]([O-])(=O)=O XMVONEAAOPAGAO-UHFFFAOYSA-N 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- CZXRMHUWVGPWRM-UHFFFAOYSA-N strontium;barium(2+);oxygen(2-);titanium(4+) Chemical compound [O-2].[O-2].[O-2].[O-2].[Ti+4].[Sr+2].[Ba+2] CZXRMHUWVGPWRM-UHFFFAOYSA-N 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 239000011787 zinc oxide Substances 0.000 description 1
Images
















Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/10—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors
- H02N2/103—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing rotary motion, e.g. rotary motors by pressing one or more vibrators against the rotor
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/50—Piezoelectric or electrostrictive devices having a stacked or multilayer structure
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/02—Gripping heads and other end effectors servo-actuated
- B25J15/0253—Gripping heads and other end effectors servo-actuated comprising parallel grippers
- B25J15/0293—Gripping heads and other end effectors servo-actuated comprising parallel grippers having fingers directly connected to actuator
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/10—Programme-controlled manipulators characterised by positioning means for manipulator elements
- B25J9/12—Programme-controlled manipulators characterised by positioning means for manipulator elements electric
- B25J9/123—Linear actuators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F04—POSITIVE - DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS FOR LIQUIDS OR ELASTIC FLUIDS
- F04B—POSITIVE-DISPLACEMENT MACHINES FOR LIQUIDS; PUMPS
- F04B43/00—Machines, pumps, or pumping installations having flexible working members
- F04B43/08—Machines, pumps, or pumping installations having flexible working members having tubular flexible members
- F04B43/09—Pumps having electric drive
- F04B43/095—Piezo-electric drive
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/0005—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing non-specific motion; Details common to machines covered by H02N2/02 - H02N2/16
- H02N2/001—Driving devices, e.g. vibrators
- H02N2/003—Driving devices, e.g. vibrators using longitudinal or radial modes combined with bending modes
- H02N2/004—Rectangular vibrators
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/02—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors
- H02N2/026—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction producing linear motion, e.g. actuators; Linear positioners ; Linear motors by pressing one or more vibrators against the driven body
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02N—ELECTRIC MACHINES NOT OTHERWISE PROVIDED FOR
- H02N2/00—Electric machines in general using piezoelectric effect, electrostriction or magnetostriction
- H02N2/22—Methods relating to manufacturing, e.g. assembling, calibration
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/01—Manufacture or treatment
- H10N30/05—Manufacture of multilayered piezoelectric or electrostrictive devices, or parts thereof, e.g. by stacking piezoelectric bodies and electrodes
- H10N30/053—Manufacture of multilayered piezoelectric or electrostrictive devices, or parts thereof, e.g. by stacking piezoelectric bodies and electrodes by integrally sintering piezoelectric or electrostrictive bodies and electrodes
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/01—Manufacture or treatment
- H10N30/06—Forming electrodes or interconnections, e.g. leads or terminals
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/20—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators
- H10N30/202—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement
- H10N30/2023—Piezoelectric or electrostrictive devices with electrical input and mechanical output, e.g. functioning as actuators or vibrators using longitudinal or thickness displacement combined with bending, shear or torsion displacement having polygonal or rectangular shape
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/85—Piezoelectric or electrostrictive active materials
- H10N30/853—Ceramic compositions
- H10N30/8536—Alkaline earth metal based oxides, e.g. barium titanates
-
- H—ELECTRICITY
- H10—SEMICONDUCTOR DEVICES; ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N—ELECTRIC SOLID-STATE DEVICES NOT OTHERWISE PROVIDED FOR
- H10N30/00—Piezoelectric or electrostrictive devices
- H10N30/80—Constructional details
- H10N30/87—Electrodes or interconnections, e.g. leads or terminals
- H10N30/871—Single-layered electrodes of multilayer piezoelectric or electrostrictive devices, e.g. internal electrodes
Description
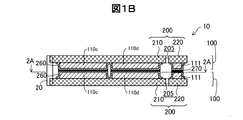
図1Aは、圧電アクチュエーター10の概略構成を示す平面図である。圧電アクチュエーター10は、圧電素子110a,110b,110c,110d,110eと、基板200と、凸部材20と、を備える。基板200は、振動部210と、振動部210を支持する支持部220とを有する。振動部210は略長方形形状を有しており、圧電素子110a,110b,110c,110d,110eを配置している。圧電素子110eは、略長方形形状に構成されており、振動部210の幅方向の中央において、振動部210の長手方向に沿って構成されている。圧電素子110a,110b,110c,110dは、振動部210の四隅の位置に構成されている。支持部220は、振動部210の約半分を囲うように構成されており、支持部220の端部は、振動部210と、振動部210の長辺の中央で接続されている。支持部220のうちの振動部210と接続されている端部を「第1接続部222」、「第2接続部223」と呼び、第1接続部222、第2接続部223以外の部分を「固定部221」と呼ぶ。振動部210と支持部220との間には、隙間205が構成されている。圧電素子110a〜110eに電圧を印加すると圧電素子110a〜110eが伸縮し、振動部210が振動するが、隙間205は、この振動によっても振動部210が支持部220の固定部221と接触しない大きさに構成されている。振動部210の支持部220に囲われていない側の短辺には、凸部材20が配置されている。すなわち、振動部210の先端に突出した形状の領域が配置されている。凸部材20は、セラミックス(例えばAl2O3)などの耐久性がある材料で構成することが好ましい。
Ni2+ + H2PO2 − + H2O → Ni + H2PO3 − + H2
図12は、第2の実施形態の圧電アクチュエーター11を示す説明図である。第1の実施形態の圧電アクチュエーター10は、2つの圧電アクチュエーターユニット100を備えていたが、第2の実施形態の圧電アクチュエーター11は、圧電アクチュエーターユニット100を1つのみ備え、第1の実施形態の2つ目の圧電アクチュエーターユニット100の代わりに、圧電素子が配置されていない基板200を備えている。すなわち、第1の圧電アクチュエーターユニット100の圧電素子110a〜110eを、第1の圧電アクチュエーターユニット100の基板200と、圧電素子が配置されていない基板200とで挟んでいる。
図13は、第3の実施形態の積層アクチュエーター12を示す説明図である。第1の実施形態では、圧電アクチュエーター10について説明した。この圧電アクチュエーター10を複数個用いて、基板200の面の法線方向に積層して、積層アクチュエーター12を構成することが可能である。なお、第2の実施形態の圧電アクチュエーター11を複数個用いて基板200の面の法線方向に積層してもよい。
上述した圧電アクチュエーター10は、共振を利用することで被駆動部材に対して大きな力を与えることができるものであり、各種の装置に適用可能である。圧電アクチュエーター10は、例えば、ロボット(電子部品搬送装置(ICハンドラー)も含む)、投薬用ポンプ、時計のカレンダー送り装置、印刷装置(例えば紙送り機構。ただし、ヘッドに利用される圧電アクチュエーターでは、振動板を共振させないので、ヘッドには適用不可である。)等の各種の機器における駆動装置として用いることが出来る。以下、代表的な実施の形態について説明する。
Claims (12)
- 平面視で一部が重なって配置されている2つの基板と、
圧電体を備えた複数の圧電素子であって、前記平面視で前記2つの基板が重なっている領域において、前記2つの基板の面上であって、前記2つの基板が互いに向かい合う側の面上の少なくとも四隅に配置された圧電体を有する複数の圧電素子と、
前記2つの基板の面上に分離して配置された前記複数の圧電素子のそれぞれ一部を覆っている被覆部と、
を備える、圧電アクチュエーター。 - 2つの前記被覆部の間に接着層が配置されている、請求項1に記載の圧電アクチュエーター。
- 前記基板は、振動部と、前記振動部を支持する支持部と、を有し、
前記複数の圧電素子は、前記振動部に設けられている、請求項1または2に記載の圧電アクチュエーター。 - 前記被覆部は、前記圧電素子の全体を覆っている、請求項3に記載の圧電アクチュエーター。
- 前記被覆部は、前記支持部の周囲の一部を覆っている、請求項3または4に記載の圧電アクチュエーター。
- 前記振動部の先端に、突出している領域を有する、請求項3乃至5のいずれか一項に記載の圧電アクチュエーター。
- 前記振動部と前記支持部とを繋いで配置されている配線層と、
前記配線層と電気的に接続され、前記支持部に接続されている回路基板と、
を備える、請求項3乃至6のいずれか一項に記載の圧電アクチュエーター。 - 請求項1乃至7のいずれか一項に記載の圧電アクチュエーターが複数積層されている積層アクチュエーター。
- 請求項1乃至7のいずれか一項に記載の圧電アクチュエーター、または、請求項8に記載の積層アクチュエーターを備える圧電モーター。
- 請求項9に記載の圧電モーターを備えるロボット。
- 請求項9に記載の圧電モーターを備えるハンド。
- 請求項9に記載の圧電モーターを備える送液ポンプ。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015222564A JP6601174B2 (ja) | 2015-11-13 | 2015-11-13 | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ |
| CN201610959198.5A CN106849741B (zh) | 2015-11-13 | 2016-11-03 | 压电致动器、层叠致动器、压电马达、机器人以及机械手 |
| EP16198426.5A EP3176842B1 (en) | 2015-11-13 | 2016-11-11 | Piezoelectric actuator, piezoelectric motor, robot, and hand thereof |
| US15/349,202 US10497854B2 (en) | 2015-11-13 | 2016-11-11 | Piezoelectric actuator, stacked actuator, piezoelectric motor, robot, hand, and liquid transport pump |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015222564A JP6601174B2 (ja) | 2015-11-13 | 2015-11-13 | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017093194A JP2017093194A (ja) | 2017-05-25 |
| JP2017093194A5 JP2017093194A5 (ja) | 2018-11-08 |
| JP6601174B2 true JP6601174B2 (ja) | 2019-11-06 |
Family
ID=57286380
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015222564A Active JP6601174B2 (ja) | 2015-11-13 | 2015-11-13 | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US10497854B2 (ja) |
| EP (1) | EP3176842B1 (ja) |
| JP (1) | JP6601174B2 (ja) |
| CN (1) | CN106849741B (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR102049990B1 (ko) * | 2013-03-28 | 2019-12-03 | 삼성전자주식회사 | c-Met 항체 및 VEGF 결합 단편이 연결된 융합 단백질 |
| JP6946893B2 (ja) * | 2017-09-22 | 2021-10-13 | セイコーエプソン株式会社 | 圧電駆動装置、圧電モーター、ロボット、電子部品搬送装置、プリンターおよびプロジェクター |
Family Cites Families (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6108274A (en) * | 1995-12-15 | 2000-08-22 | Innovative Transducers, Inc. | Acoustic sensor and array thereof |
| JP3184117B2 (ja) * | 1997-05-23 | 2001-07-09 | セイコーインスツルメンツ株式会社 | 超音波モータ及び超音波モータ付き電子機器 |
| DE19817038A1 (de) * | 1998-04-17 | 1999-10-21 | Philips Patentverwaltung | Piezomotor |
| JP4904656B2 (ja) * | 2001-09-27 | 2012-03-28 | パナソニック株式会社 | 薄膜圧電体素子およびその製造方法 |
| JP3846271B2 (ja) * | 2001-11-05 | 2006-11-15 | 松下電器産業株式会社 | 薄膜圧電体素子およびその製造方法 |
| JP2003272324A (ja) * | 2002-03-15 | 2003-09-26 | Matsushita Electric Ind Co Ltd | 薄膜圧電体素子およびその製造方法並びにアクチュエータ |
| JP4145760B2 (ja) | 2002-10-03 | 2008-09-03 | セイコーエプソン株式会社 | 圧電アクチュエータユニット及びその製造方法 |
| US7132723B2 (en) * | 2002-11-14 | 2006-11-07 | Raytheon Company | Micro electro-mechanical system device with piezoelectric thin film actuator |
| EP1427031B1 (en) * | 2002-12-03 | 2013-05-08 | Panasonic Corporation | Manufacturing method of a thin film piezoelectric element |
| JP2004320979A (ja) | 2003-04-03 | 2004-11-11 | Seiko Epson Corp | 稼働装置および電気機器 |
| JP4141990B2 (ja) * | 2004-07-12 | 2008-08-27 | セイコーエプソン株式会社 | 圧電アクチュエータおよび機器 |
| JP2006080318A (ja) | 2004-09-10 | 2006-03-23 | Nec Tokin Corp | 圧電アクチュエーター |
| DE102004044138A1 (de) * | 2004-09-13 | 2006-03-30 | Robert Bosch Gmbh | Nadelförmiger Kraftsensor |
| JP2006340503A (ja) | 2005-06-02 | 2006-12-14 | Seiko Epson Corp | 圧電アクチュエータ及びこれを備えた機器 |
| JP4762109B2 (ja) * | 2006-10-24 | 2011-08-31 | 株式会社日本自動車部品総合研究所 | 内燃機関用スパークプラグ |
| JP2008147219A (ja) | 2006-12-06 | 2008-06-26 | Nano Control:Kk | 積層型圧電アクチュエータ、その駆動方法及び位置決めセンサ、及び変位センサ |
| JP2008218953A (ja) | 2007-03-08 | 2008-09-18 | Seiko Epson Corp | 圧電振動体、電子機器、圧電振動体の製造方法 |
| KR101319258B1 (ko) * | 2007-04-19 | 2013-10-18 | 에스케이플래닛 주식회사 | 쓰기 가능한 전자종이 표시소자 및 그의 제조 방법 |
| JP2009128351A (ja) | 2007-11-19 | 2009-06-11 | Microstone Corp | ジャイロセンサ振動体 |
| KR20120063345A (ko) * | 2010-12-07 | 2012-06-15 | 삼성전기주식회사 | 햅틱 구동부 및 이를 구비하는 전자 장치 |
| JP5665522B2 (ja) | 2010-12-20 | 2015-02-04 | キヤノン株式会社 | 振動体及び振動型駆動装置 |
| JP6008077B2 (ja) * | 2011-12-06 | 2016-10-19 | セイコーエプソン株式会社 | アクチュエータ―、ロボット、電子部品搬送装置及び電子部品検査装置 |
| DE102012212832A1 (de) * | 2012-07-23 | 2014-01-23 | Hilti Aktiengesellschaft | Baugruppe für eine Leitungsdurchführung |
| JP6172971B2 (ja) | 2013-02-27 | 2017-08-02 | オリンパス株式会社 | 駆動装置、及び画像機器 |
| KR102037068B1 (ko) * | 2013-04-02 | 2019-10-30 | 삼성디스플레이 주식회사 | 터치 스크린 패널에 대한 터치 입력의 압력 에너지를 회수하는 에너지 회수 시스템 |
| WO2015159628A1 (ja) * | 2014-04-18 | 2015-10-22 | 株式会社村田製作所 | 押圧センサ |
| CN104022679B (zh) * | 2014-06-25 | 2016-09-07 | 哈尔滨工业大学 | 夹持式纵弯复合超声电机振子 |
| CN105375812A (zh) * | 2014-08-13 | 2016-03-02 | 精工爱普生株式会社 | 压电驱动装置及其驱动方法、机器人及其驱动方法 |
| JP6431984B2 (ja) * | 2015-07-27 | 2018-11-28 | 富士フイルム株式会社 | 電気音響変換フィルムおよびその製造方法、ならびに、電気音響変換器、フレキシブルディスプレイ、声帯マイクロフォンおよび楽器用センサー |
| JP6676935B2 (ja) * | 2015-11-13 | 2020-04-08 | セイコーエプソン株式会社 | 電気デバイス、圧電モーター、ロボット、ハンド及び送液ポンプ |
-
2015
- 2015-11-13 JP JP2015222564A patent/JP6601174B2/ja active Active
-
2016
- 2016-11-03 CN CN201610959198.5A patent/CN106849741B/zh active Active
- 2016-11-11 US US15/349,202 patent/US10497854B2/en active Active
- 2016-11-11 EP EP16198426.5A patent/EP3176842B1/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| EP3176842A2 (en) | 2017-06-07 |
| CN106849741A (zh) | 2017-06-13 |
| JP2017093194A (ja) | 2017-05-25 |
| EP3176842B1 (en) | 2022-03-02 |
| US10497854B2 (en) | 2019-12-03 |
| EP3176842A3 (en) | 2017-08-23 |
| CN106849741B (zh) | 2020-02-21 |
| US20170141290A1 (en) | 2017-05-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6405785B2 (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP6676935B2 (ja) | 電気デバイス、圧電モーター、ロボット、ハンド及び送液ポンプ | |
| JP6398454B2 (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP6439466B2 (ja) | 圧電駆動装置、ロボット及びロボットの駆動方法 | |
| JP2017017916A (ja) | 圧電駆動装置、ロボット及び圧電駆動装置の駆動方法 | |
| JP2017175696A (ja) | 圧電駆動装置の制御回路、圧電駆動装置、超音波モーター、ロボット、ハンド、及びポンプ | |
| US10147866B2 (en) | Piezoelectric driving device and driving method therefor, and robot and driving method therefor | |
| JP2017103953A (ja) | モーター用圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP6601174B2 (ja) | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ | |
| JP2017069998A (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP6766328B2 (ja) | 圧電駆動装置、ロボット、及び圧電駆動装置の駆動方法 | |
| US20170008167A1 (en) | Piezoelectric drive device, robot, and method for driving piezoelectric drive device | |
| JP6503764B2 (ja) | 圧電素子駆動回路、及び、ロボット | |
| JP6432204B2 (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP2016040984A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP6641910B2 (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2016178737A (ja) | 圧電駆動装置、ロボット及びロボットの駆動方法 | |
| JP6662007B2 (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP2017135935A (ja) | 圧電アクチュエーター、圧電モーター、ロボット、ハンドおよび送液ポンプ | |
| JP6432369B2 (ja) | 圧電駆動装置、ロボット及びロボットの駆動方法 | |
| JP2017112650A (ja) | 振動体、積層振動体、圧電アクチュエーター、圧電モーター、ロボット、ハンドおよび送液ポンプ | |
| JP6413461B2 (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP2017135936A (ja) | 圧電アクチュエーター、圧電モーター、ロボット、ハンド、送液ポンプ及び圧電アクチュエーターの調整方法 | |
| JP2016144269A (ja) | 圧電駆動装置、ロボット及びロボットの駆動方法 | |
| JP2016158380A (ja) | 圧電素子駆動回路、及び、ロボット |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180927 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180927 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190625 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190628 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190809 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190910 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190923 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6601174 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |