JP6662007B2 - 圧電駆動装置、モーター、ロボット、およびポンプ - Google Patents
圧電駆動装置、モーター、ロボット、およびポンプ Download PDFInfo
- Publication number
- JP6662007B2 JP6662007B2 JP2015236650A JP2015236650A JP6662007B2 JP 6662007 B2 JP6662007 B2 JP 6662007B2 JP 2015236650 A JP2015236650 A JP 2015236650A JP 2015236650 A JP2015236650 A JP 2015236650A JP 6662007 B2 JP6662007 B2 JP 6662007B2
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric
- contact portion
- driving device
- vibrating body
- tip
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 239000000853 adhesive Substances 0.000 claims description 28
- 230000001070 adhesive effect Effects 0.000 claims description 28
- 239000000758 substrate Substances 0.000 claims description 13
- 239000007788 liquid Substances 0.000 claims description 12
- 238000003825 pressing Methods 0.000 claims description 7
- 230000033001 locomotion Effects 0.000 claims description 5
- 239000010410 layer Substances 0.000 description 51
- 230000014509 gene expression Effects 0.000 description 20
- 210000000707 wrist Anatomy 0.000 description 9
- 239000000463 material Substances 0.000 description 8
- 238000000034 method Methods 0.000 description 8
- 238000010586 diagram Methods 0.000 description 7
- 230000004048 modification Effects 0.000 description 6
- 238000012986 modification Methods 0.000 description 6
- 238000000059 patterning Methods 0.000 description 5
- BASFCYQUMIYNBI-UHFFFAOYSA-N platinum Chemical compound [Pt] BASFCYQUMIYNBI-UHFFFAOYSA-N 0.000 description 5
- 229910052741 iridium Inorganic materials 0.000 description 4
- 230000007246 mechanism Effects 0.000 description 4
- 230000005540 biological transmission Effects 0.000 description 3
- 229940079593 drug Drugs 0.000 description 3
- 239000003814 drug Substances 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- GKOZUEZYRPOHIO-UHFFFAOYSA-N iridium atom Chemical compound [Ir] GKOZUEZYRPOHIO-UHFFFAOYSA-N 0.000 description 3
- 229910052451 lead zirconate titanate Inorganic materials 0.000 description 3
- 229910052697 platinum Inorganic materials 0.000 description 3
- 238000000926 separation method Methods 0.000 description 3
- 239000010409 thin film Substances 0.000 description 3
- 229910052719 titanium Inorganic materials 0.000 description 3
- VYPSYNLAJGMNEJ-UHFFFAOYSA-N Silicium dioxide Chemical compound O=[Si]=O VYPSYNLAJGMNEJ-UHFFFAOYSA-N 0.000 description 2
- XUIMIQQOPSSXEZ-UHFFFAOYSA-N Silicon Chemical compound [Si] XUIMIQQOPSSXEZ-UHFFFAOYSA-N 0.000 description 2
- MCMNRKCIXSYSNV-UHFFFAOYSA-N Zirconium dioxide Chemical compound O=[Zr]=O MCMNRKCIXSYSNV-UHFFFAOYSA-N 0.000 description 2
- PNEYBMLMFCGWSK-UHFFFAOYSA-N aluminium oxide Inorganic materials [O-2].[O-2].[O-2].[Al+3].[Al+3] PNEYBMLMFCGWSK-UHFFFAOYSA-N 0.000 description 2
- 238000005452 bending Methods 0.000 description 2
- 239000000919 ceramic Substances 0.000 description 2
- 238000005229 chemical vapour deposition Methods 0.000 description 2
- 238000002425 crystallisation Methods 0.000 description 2
- 230000008025 crystallization Effects 0.000 description 2
- 230000005684 electric field Effects 0.000 description 2
- NOESYZHRGYRDHS-UHFFFAOYSA-N insulin Chemical compound N1C(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(NC(=O)CN)C(C)CC)CSSCC(C(NC(CO)C(=O)NC(CC(C)C)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CCC(N)=O)C(=O)NC(CC(C)C)C(=O)NC(CCC(O)=O)C(=O)NC(CC(N)=O)C(=O)NC(CC=2C=CC(O)=CC=2)C(=O)NC(CSSCC(NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2C=CC(O)=CC=2)NC(=O)C(CC(C)C)NC(=O)C(C)NC(=O)C(CCC(O)=O)NC(=O)C(C(C)C)NC(=O)C(CC(C)C)NC(=O)C(CC=2NC=NC=2)NC(=O)C(CO)NC(=O)CNC2=O)C(=O)NCC(=O)NC(CCC(O)=O)C(=O)NC(CCCNC(N)=N)C(=O)NCC(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC=CC=3)C(=O)NC(CC=3C=CC(O)=CC=3)C(=O)NC(C(C)O)C(=O)N3C(CCC3)C(=O)NC(CCCCN)C(=O)NC(C)C(O)=O)C(=O)NC(CC(N)=O)C(O)=O)=O)NC(=O)C(C(C)CC)NC(=O)C(CO)NC(=O)C(C(C)O)NC(=O)C1CSSCC2NC(=O)C(CC(C)C)NC(=O)C(NC(=O)C(CCC(N)=O)NC(=O)C(CC(N)=O)NC(=O)C(NC(=O)C(N)CC=1C=CC=CC=1)C(C)C)CC1=CN=CN1 NOESYZHRGYRDHS-UHFFFAOYSA-N 0.000 description 2
- HFGPZNIAWCZYJU-UHFFFAOYSA-N lead zirconate titanate Chemical compound [O-2].[O-2].[O-2].[O-2].[O-2].[Ti+4].[Zr+4].[Pb+2] HFGPZNIAWCZYJU-UHFFFAOYSA-N 0.000 description 2
- 239000007791 liquid phase Substances 0.000 description 2
- 229910052751 metal Inorganic materials 0.000 description 2
- 239000002184 metal Substances 0.000 description 2
- 239000000203 mixture Substances 0.000 description 2
- 239000002243 precursor Substances 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 229910052710 silicon Inorganic materials 0.000 description 2
- 239000010703 silicon Substances 0.000 description 2
- 229910052814 silicon oxide Inorganic materials 0.000 description 2
- 229910052726 zirconium Inorganic materials 0.000 description 2
- 229910018072 Al 2 O 3 Inorganic materials 0.000 description 1
- 102000004877 Insulin Human genes 0.000 description 1
- 108090001061 Insulin Proteins 0.000 description 1
- 229910052581 Si3N4 Inorganic materials 0.000 description 1
- 239000012790 adhesive layer Substances 0.000 description 1
- 229910052782 aluminium Inorganic materials 0.000 description 1
- QVGXLLKOCUKJST-UHFFFAOYSA-N atomic oxygen Chemical compound [O] QVGXLLKOCUKJST-UHFFFAOYSA-N 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 229910052804 chromium Inorganic materials 0.000 description 1
- VNNRSPGTAMTISX-UHFFFAOYSA-N chromium nickel Chemical compound [Cr].[Ni] VNNRSPGTAMTISX-UHFFFAOYSA-N 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 229910052802 copper Inorganic materials 0.000 description 1
- 238000000151 deposition Methods 0.000 description 1
- 238000005530 etching Methods 0.000 description 1
- 229910052737 gold Inorganic materials 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 229910052738 indium Inorganic materials 0.000 description 1
- 229940125396 insulin Drugs 0.000 description 1
- 229910052742 iron Inorganic materials 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 229910001120 nichrome Inorganic materials 0.000 description 1
- 229910052759 nickel Inorganic materials 0.000 description 1
- 229910052758 niobium Inorganic materials 0.000 description 1
- 229910052760 oxygen Inorganic materials 0.000 description 1
- 239000001301 oxygen Substances 0.000 description 1
- RVTZCBVAJQQJTK-UHFFFAOYSA-N oxygen(2-);zirconium(4+) Chemical compound [O-2].[O-2].[Zr+4] RVTZCBVAJQQJTK-UHFFFAOYSA-N 0.000 description 1
- 238000000206 photolithography Methods 0.000 description 1
- 239000002994 raw material Substances 0.000 description 1
- 230000004044 response Effects 0.000 description 1
- HQVNEWCFYHHQES-UHFFFAOYSA-N silicon nitride Chemical compound N12[Si]34N5[Si]62N3[Si]51N64 HQVNEWCFYHHQES-UHFFFAOYSA-N 0.000 description 1
- 238000003980 solgel method Methods 0.000 description 1
- 238000004544 sputter deposition Methods 0.000 description 1
- 230000000087 stabilizing effect Effects 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 229910052712 strontium Inorganic materials 0.000 description 1
- 229910052715 tantalum Inorganic materials 0.000 description 1
- 229910052718 tin Inorganic materials 0.000 description 1
- 230000001052 transient effect Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
- 238000001771 vacuum deposition Methods 0.000 description 1
- 210000003857 wrist joint Anatomy 0.000 description 1
- 229910001928 zirconium oxide Inorganic materials 0.000 description 1
Images







Landscapes
- Manipulator (AREA)
- Reciprocating Pumps (AREA)
- General Electrical Machinery Utilizing Piezoelectricity, Electrostriction Or Magnetostriction (AREA)
Description
本発明に係る圧電駆動装置の一態様は、
固定部、および圧電素子が設けられ前記固定部に支持された振動体部を有する基板と、
被駆動体に接触し、前記振動体部の動きを前記被駆動体に伝える接触部と、
を含み、
前記接触部は、前記振動体部の長手方向における端部に設けられ、
前記被駆動体に前記接触部が押し当てられていないときの前記端部と前記接触部の先端との間の距離と、前記被駆動体に前記接触部が押し当てられたときの前記端部と前記先端との間の距離と、の差は、前記振動体部が駆動された場合の前記長手方向の振幅より小さい。
適用例1において、
前記振幅をX0、前記被駆動体の前記接触部への押圧力をF0とすると、前記接触部の前記長手方向におけるバネ定数Kは、
K>F0/X0
の関係を満たしてもよい。
適用例2において、
前記接触部は、前記先端を構成する先端部と、前記先端部と前記振動体部との間に設けられた接着剤部と、を有し、
前記先端部の前記長手方向の長さをLs、前記先端部と前記接着剤部との接触面の前記長手方向と直交する幅方向の長さをWs、前記接触面の前記長手方向および前記幅方向と直交する方向の長さをTs、前記先端部のヤング率をEs、前記接着剤部のヤング率をEaとすると、前記接着剤部の前記長手方向の長さLaは、
La<(X0/F0)×Ea×Ws×Ts−(Ls×Ea)/Es
の関係を満たしてもよい。
本発明に係るモーターの一態様は、
適用例1ないし3のいずれか1例に記載の圧電駆動装置と、
前記圧電駆動装置によって回転されるローターと、
を含む。
本発明に係るロボットの一態様は、
複数のリンク部と、
複数の前記リンク部を接続する関節部と、
複数の前記リンク部を前記関節部で回動させる適用例1ないし3のいずれか1例に記載の圧電駆動装置と、
を含む。
本発明に係るポンプの一態様は、
適用例1ないし3のいずれか1例に記載の圧電駆動装置と、
液体を輸送するチューブと、
前記圧電駆動装置の駆動によって前記チューブを閉鎖する複数のフィンガーと、
を含む。
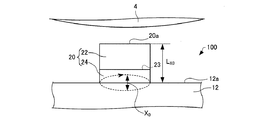
まず、本実施形態に係る圧電駆動装置について、図面を参照しながら説明する。図1は、本実施形態に係る圧電駆動装置100を模式的に示す平面図である。図2は、本実施形態に係る圧電駆動装置100を模式的に示す図1のII−II線断面である。図3および図4は、本実施形態に係る圧電駆動装置100の接触部20近傍を模式的に示す平面図である。図5は、本実施形態に係る圧電駆動装置100の接触部20近傍を模式的に示す斜視図である。
圧電駆動装置100は、図1〜図5に示すように、基板10と、接触部20と、圧電素子30と、を含む。
0は、先端20aを有し、接触部20は、先端20aにおいて被駆動部材(具体的には、図3および図4に示すローター4)と接触して、振動体部12の動きを被駆動部材に伝える部材である。ローター4の形状は、例えば、円柱状、球状である。先端20aは、接触部20の端部12aと接する面と反対の面である。
La<(1/2)×(X0/F0)×Ea×Ws×Ts−(1/2)×(Ls×Ea)/Es ・・・ (3)
の平面形状は、長方形である。第1電極32は、振動体部12上に設けられたイリジウム層と、イリジウム層上に設けられた白金層と、によって構成されていてもよい。イリジウム層の厚さは、例えば、5nm以上100nm以下である。白金層の厚さは、例えば、50nm以上300nm以下である。なお、第1電極32は、Ti、Pt、Ta、Ir、Sr、In、Sn、Au、Al、Fe、Cr、Ni、Cuなどからなる金属層、またはこれらの2種以上を混合または積層したものであってもよい。第1電極32は、圧電体層34に電圧を印加するための一方の電極である。
ーター4と常に接触することになり、ローター4を回転することができない場合がある。そのため、出力特性が不安定になる場合がある。
次に、本実施形態に係る圧電駆動装置の製造方法について、図面を参照しながら説明する。
Deposition)法などである。結晶化は、酸素雰囲気において、例えば、700℃〜800℃の熱処理により行われる。
以下に実験例を示し、本発明をより具体的に説明する。なお、本発明は、以下の実験例によって何ら限定されるものではない。
図4に示すように、接触部にローターを力(押圧力)F0で押し付けた場合の、接触部の変形量をδxとすると、接触部の長手方向のバネ定数Kは、下記式(4)となり、式(4)を展開して下記式(5)を得ることができる。
δx=F0/K ・・・ (5)
X0=F0/K0 ・・・ (7)
K>K0 ・・・ (9)
K>F0/X0 ・・・ (1)
接触部の先端部のバネ定数Ksは、下記式(10)となる。また、接触部の接着剤部のバネ定数Kaは、下記式(11)となる。
Ka=Es×(Ws×Ts)/La ・・・ (11)
1),(14)より下記式(15)を得ることができる。そして、式(15)を展開して、式(2)を得ることができる。
1/Ka<X0/F0−1/Ks ・・・ (14)
La/(Ea×Ws×Ts)<X0/F0−Ls/(Es×Ws×Ts) ・・・ (15)
La<(X0/F0)×Ea×Ws×Ts−(Ls×Ea)/Es ・・・ (2)
X0=5×10−7m
Es=3.7×1011Pa
Ws=2×10−4m
Ls=1×10−4m
Ts=2×10−4m
Ea=3×107Pa
La<(1/2)×(X0/F0)×Ea×Ws×Ts−(1/2)×(Ls×Ea)/Es ・・・ (3)
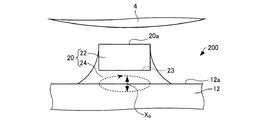
次に、本実施形態の変形例に係る圧電駆動装置について、図面を参照しながら説明する。図8は、本実施形態の変形例に係る圧電駆動装置200を模式的に示す平面図である。以下、本実施形態の変形例に係る圧電駆動装置200において、本実施形態に係る圧電駆動装置100の構成部材と同様の機能を有する部材については同一の符号を付し、その詳細な説明を省略する。
本発明に係る圧電駆動装置は、共振を利用することで被駆動体に対して大きな力を与えることができるものであり、各種の装置に適用可能である。本発明に係る圧電駆動装置は、例えば、ロボット(電子部品搬送装置(ICハンドラー)も含む)、投薬用ポンプ、時計のカレンダー送り装置、印刷装置の紙送り機構等の各種の機器における駆動装置として用いることが出来る。以下、代表的な実施の形態について説明する。以下では、本発明に係る圧電駆動装置として、圧電駆動装置100を含む装置について説明する。
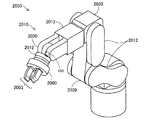
図9は、圧電駆動装置100を利用したロボット2050を説明するための図である。ロボット2050は、複数本のリンク部2012(「リンク部材」とも呼ぶ)と、それらリンク部2012の間を回動または屈曲可能な状態で接続する複数の関節部2020と、を備えたアーム2010(「腕部」とも呼ぶ)を有している。
図11は、圧電駆動装置100を利用した送液ポンプ2200の一例を示す説明するための図である。送液ポンプ2200は、ケース2230内に、リザーバー2211と、チューブ2212と、圧電駆動装置100と、ローター2222と、減速伝達機構2223と、カム2202と、複数のフィンガー2213,2214,2215,2216,2217,2218,2219と、を含む。
Claims (6)
- 圧電素子が設けられ、振動体部を有する基板と、
被駆動体に接触し、前記振動体部の動きを前記被駆動体に伝える接触部と、
を含み、
前記接触部は、前記振動体部の長手方向における端部に設けられ、
前記被駆動体に前記接触部が押し当てられていないときの前記端部と前記接触部の先端との間の距離と、前記被駆動体に前記接触部が押し当てられたときの前記端部と前記先端との間の距離と、の差は、前記振動体部が駆動された場合の前記長手方向の振幅より小さく、
前記接触部は、
前記長手方向に沿った側面を有し、前記先端を構成する先端部と、
前記先端部と前記振動体部との間、および前記側面に設けられた接着剤部と、
を有し、
前記接着剤部の一部は、前記側面の中心よりも前記先端側に位置している、圧電駆動装置。 - 請求項1において、
前記振幅をX0、前記被駆動体の前記接触部への押圧力をF0とすると、前記接触部の前記長手方向におけるバネ定数Kは、
K>F0/X0
の関係を満たす、圧電駆動装置。 - 請求項2において、
前記先端部の前記長手方向の長さをLs、前記先端部と前記接着剤部との接触面の前記長手方向と直交する幅方向の長さをWs、前記接触面の前記長手方向および前記幅方向と直交する方向の長さをTs、前記先端部のヤング率をEs、前記接着剤部のヤング率をEaとすると、前記接着剤部の前記長手方向の長さLaは、
La<(X0/F0)×Ea×Ws×Ts−(Ls×Ea)/Es
の関係を満たす、圧電駆動装置。 - 請求項1ないし3のいずれか1項に記載の圧電駆動装置と、
前記圧電駆動装置によって回転されるローターと、
を含む、モーター。 - 複数のリンク部と、
複数の前記リンク部を接続する関節部と、
複数の前記リンク部を前記関節部で回動させる請求項1ないし3のいずれか1項に記載の圧電駆動装置と、
を含む、ロボット。 - 請求項1ないし3のいずれか1項に記載の圧電駆動装置と、
液体を輸送するチューブと、
前記圧電駆動装置の駆動によって前記チューブを閉塞する複数のフィンガーと、
を含む、ポンプ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236650A JP6662007B2 (ja) | 2015-12-03 | 2015-12-03 | 圧電駆動装置、モーター、ロボット、およびポンプ |
| CN201611089232.4A CN106877733B (zh) | 2015-12-03 | 2016-11-30 | 压电驱动装置、马达、机器人、以及泵 |
| US15/367,553 US10601345B2 (en) | 2015-12-03 | 2016-12-02 | Piezoelectric driving device, motor, robot, and pump |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236650A JP6662007B2 (ja) | 2015-12-03 | 2015-12-03 | 圧電駆動装置、モーター、ロボット、およびポンプ |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017103955A JP2017103955A (ja) | 2017-06-08 |
| JP2017103955A5 JP2017103955A5 (ja) | 2018-12-06 |
| JP6662007B2 true JP6662007B2 (ja) | 2020-03-11 |
Family
ID=59015774
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015236650A Expired - Fee Related JP6662007B2 (ja) | 2015-12-03 | 2015-12-03 | 圧電駆動装置、モーター、ロボット、およびポンプ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6662007B2 (ja) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7035761B2 (ja) * | 2018-04-24 | 2022-03-15 | セイコーエプソン株式会社 | 移動体装置、ハンド、ロボットおよび移動体装置の制御方法 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4033643B2 (ja) * | 2001-06-18 | 2008-01-16 | 日本碍子株式会社 | 圧電/電歪デバイスおよびその製造方法 |
| JP2005086991A (ja) * | 2003-09-11 | 2005-03-31 | Seiko Epson Corp | 圧電アクチュエータ、モータおよび圧電アクチュエータを備えた機器 |
| JP4058018B2 (ja) * | 2003-12-16 | 2008-03-05 | 松下電器産業株式会社 | 圧電素子及びその製造方法、並びにその圧電素子を備えたインクジェットヘッド、インクジェット式記録装置及び角速度センサ |
| JP5760748B2 (ja) * | 2011-06-29 | 2015-08-12 | セイコーエプソン株式会社 | 圧電アクチュエーターの駆動方法、及び、駆動ユニット |
| JP5929138B2 (ja) * | 2011-12-06 | 2016-06-01 | セイコーエプソン株式会社 | 圧電モーターおよびロボット |
| CN102651623B (zh) * | 2012-02-02 | 2015-12-16 | 长春理工大学 | 多振子旋转型压电电机 |
| JP5895953B2 (ja) * | 2014-01-24 | 2016-03-30 | セイコーエプソン株式会社 | マイクロポンプ |
-
2015
- 2015-12-03 JP JP2015236650A patent/JP6662007B2/ja not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| JP2017103955A (ja) | 2017-06-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6641944B2 (ja) | モーター用圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2017017916A (ja) | 圧電駆動装置、ロボット及び圧電駆動装置の駆動方法 | |
| JP2016182016A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP2016152705A (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| CN106877733B (zh) | 压电驱动装置、马达、机器人、以及泵 | |
| JP2017069998A (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP6601174B2 (ja) | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ | |
| CN106253742A (zh) | 马达用压电驱动装置、马达、机器人以及泵 | |
| JP6766328B2 (ja) | 圧電駆動装置、ロボット、及び圧電駆動装置の駆動方法 | |
| US9712087B2 (en) | Piezoelectric element drive circuit and robot | |
| JP2016040994A (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP6543896B2 (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP6459291B2 (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP6662007B2 (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP6641910B2 (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2017103956A (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP6702482B2 (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP6645195B2 (ja) | 圧電駆動装置、モーター、ロボット、ならびにポンプ | |
| JP2017103954A (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| CN107068850A (zh) | 压电驱动装置、马达、机器人以及泵 | |
| JP2016178713A (ja) | 圧電駆動装置、ロボット及びその駆動方法 | |
| JP6641911B2 (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2017005925A (ja) | モーター用圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP2017135935A (ja) | 圧電アクチュエーター、圧電モーター、ロボット、ハンドおよび送液ポンプ | |
| JP2017118625A (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181024 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181024 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190717 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190730 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190902 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6662007 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |