JP2017103956A - 圧電駆動装置、モーター、ロボット、およびポンプ - Google Patents
圧電駆動装置、モーター、ロボット、およびポンプ Download PDFInfo
- Publication number
- JP2017103956A JP2017103956A JP2015236651A JP2015236651A JP2017103956A JP 2017103956 A JP2017103956 A JP 2017103956A JP 2015236651 A JP2015236651 A JP 2015236651A JP 2015236651 A JP2015236651 A JP 2015236651A JP 2017103956 A JP2017103956 A JP 2017103956A
- Authority
- JP
- Japan
- Prior art keywords
- piezoelectric
- vibrating body
- driving device
- contact portion
- drive device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images











Abstract
Description
本発明に係る圧電駆動装置の一態様は、
固定部、および圧電素子が設けられ前記固定部に支持された振動体部を有する基板と、
被駆動体に接触し、前記振動体部の動きを前記被駆動体に伝える接触部と、
を含み、
前記接触部は、前記振動体部の屈曲方向と直交する方向における端部に設けられ、
前記接触部の前記屈曲方向におけるバネ定数をKTとし、前記接触部の前記屈曲方向における最大変位量をXTmaxとし、前記接触部と前記被駆動体との間の静止摩擦力をFSとすると、
KT×XTmax<FS
の関係を満たす。
適用例1において、
前記接触部は、先端部と、前記先端部と前記振動体部との間に設けられた接着剤部と、を有し、
前記振動体部は、前記先端部側に突出し前記先端部に接する突出部を有していてもよい。
適用例1において、
前記接触部は、先端部と、前記先端部と前記振動体部との間に設けられた接着剤部と、を有し、
前記先端部は、前記振動体部側に突出し前記振動体部に接する突出部を有していてもよい。
本発明に係るモーターの一態様は、
適用例1ないし3のいずれか1例に記載の圧電駆動装置と、
前記圧電駆動装置によって回転されるローターと、
を含む。
本発明に係るロボットの一態様は、
複数のリンク部と、
複数の前記リンク部を接続する関節部と、
複数の前記リンク部を前記関節部で回動させる適用例1ないし3のいずれか1例に記載の圧電駆動装置と、
を含む。
本発明に係るポンプの一態様は、
適用例1ないし3のいずれか1例に記載の圧電駆動装置と、
液体を輸送するチューブと、
前記圧電駆動装置の駆動によって前記チューブを閉鎖する複数のフィンガーと、
を含む。
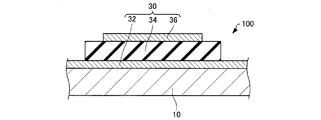
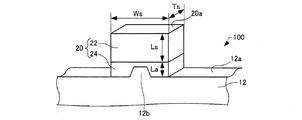
まず、本実施形態に係る圧電駆動装置について、図面を参照しながら説明する。図1は、本実施形態に係る圧電駆動装置100を模式的に示す平面図である。図2は、本実施形態に係る圧電駆動装置100を模式的に示す図1のII−II線断面である。図3は、本実施形態に係る圧電駆動装置100の接触部20近傍を模式的に示す斜視図である。
である。導電層は、例えば、Cu層、Au層、Al層やこれらの積層体である。第2電極36は、圧電体層34に電圧を印加するための他方の電極である。
電圧または脈流電圧を印加する場合には、ローター4は、方向Rとは反対方向(反時計回り方向)に回転する。
次に、本実施形態に係る圧電駆動装置の製造方法について、図面を参照しながら説明する。
Deposition)法などである。結晶化は、酸素雰囲気において、例えば、70
0℃〜800℃の熱処理により行われる。
3.1. 第1変形例
次に、本実施形態の第1変形例に係る圧電駆動装置について、図面を参照しながら説明する。図7は、本実施形態の第1変形例に係る圧電駆動装置200を模式的に示す平面図である。
次に、本実施形態の第2変形例に係る圧電駆動装置について、図面を参照しながら説明する。図10は、本実施形態の第2変形例に係る圧電駆動装置300を模式的に示す平面図である。
以下に実験例を示し、本発明をより具体的に説明する。なお、本発明は、以下の実験例によって何ら限定されるものではない。
接触部とローターとの間の静止摩擦係数をμs、接触部とローターとの間の静止摩擦力をFS、接触部の屈曲方向における最大変位量をXTmax、接触部の先端を縦方向に押し当てた(押圧した)押圧力をFPr、接触部の屈曲方向のバネ定数をKTとした。接触部が最大に変位したときでも、ローターに対して滑らない条件は、下記式(2)となる。したがって、静止摩擦係数μs=0.5、最大変位量XTmax=1μm、押圧力FPr=0.5Nとした場合は、下記式(3)を満たせば、接触部が屈曲方向に最大に変位したときでも、接触部はローターに対して滑らない。
KT<(μs×FPr)/XTmax=2.5×105N/m ・・・ (3)
4.2.1. 図7に示すようなモデルでのシミュレーション
上述した図7に示すような接触部をモデルとして、接触部の先端に長手方向に1Nを印加したときの接触部の変形量を有限要素法によるシミュレーションで求めた。そして、求めた変形量からバネ定数を算出した。接触部の先端部としては、アルミナを想定した。各寸法およびヤング率は、下記の通りである。
先端部および接着剤部の長さWs:200μm
先端部および接着剤部の長さTs:200μm
先端部の長さLs:100μm
接着剤部のヤング率:3×107N/m2
接着剤部の長さLa:3μm

次に、上述した図10に示すような接触部をモデルとして、上記の「4.2.1.」と同じシミュレーションを行った。下記に示す条件以外は、上記の「4.2.1.」と同じ条件でシミュレーションを行った。振動体部としては、シリコンを想定した。
振動体部の(突起部の)ヤング率:1.59×11N/m2
突起部の長さWt:20μm
本発明に係る圧電駆動装置は、共振を利用することで被駆動体に対して大きな力を与えることができるものであり、各種の装置に適用可能である。本発明に係る圧電駆動装置は、例えば、ロボット(電子部品搬送装置(ICハンドラー)も含む)、投薬用ポンプ、時計のカレンダー送り装置、印刷装置の紙送り機構等の各種の機器における駆動装置として用いることが出来る。以下、代表的な実施の形態について説明する。以下では、本発明に係る圧電駆動装置として、圧電駆動装置100を含む装置について説明する。
図12は、圧電駆動装置100を利用したロボット2050を説明するための図である。ロボット2050は、複数本のリンク部2012(「リンク部材」とも呼ぶ)と、それらリンク部2012の間を回動または屈曲可能な状態で接続する複数の関節部2020と、を備えたアーム2010(「腕部」とも呼ぶ)を有している。
、手首のリンク部2012およびロボットハンド2000を中心軸O周りに回動させる。ロボットハンド2000には、複数の把持部2003が立設されている。把持部2003の基端部はロボットハンド2000内で移動可能となっており、この把持部2003の根元の部分に圧電駆動装置100が搭載されている。このため、圧電駆動装置100を動作させることで、把持部2003を移動させて対象物を把持することができる。なお、ロボットとしては、単腕のロボットに限らず、腕の数が2以上の多腕ロボットにも圧電駆動装置100を適用可能である。
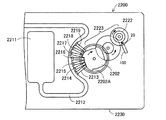
図14は、圧電駆動装置100を利用した送液ポンプ2200の一例を示す説明するための図である。送液ポンプ2200は、ケース2230内に、リザーバー2211と、チューブ2212と、圧電駆動装置100と、ローター2222と、減速伝達機構2223と、カム2202と、複数のフィンガー2213,2214,2215,2216,2217,2218,2219と、を含む。
成を含む。
Claims (6)
- 固定部、および圧電素子が設けられ前記固定部に支持された振動体部を有する基板と、
被駆動体に接触し、前記振動体部の動きを前記被駆動体に伝える接触部と、
を含み、
前記接触部は、前記振動体部の屈曲方向と直交する方向における端部に設けられ、
前記接触部の前記屈曲方向におけるバネ定数をKTとし、前記接触部の前記屈曲方向における最大変位量をXTmaxとし、前記接触部と前記被駆動体との間の静止摩擦力をFSとすると、
KT×XTmax<FS
の関係を満たす、圧電駆動装置。 - 請求項1において、
前記接触部は、先端部と、前記先端部と前記振動体部との間に設けられた接着剤部と、を有し、
前記振動体部は、前記先端部側に突出し前記先端部に接する突出部を有している、圧電駆動装置。 - 請求項1において、
前記接触部は、先端部と、前記先端部と前記振動体部との間に設けられた接着剤部と、を有し、
前記先端部は、前記振動体部側に突出し前記振動体部に接する突出部を有している、圧電駆動装置。 - 請求項1ないし3のいずれか1項に記載の圧電駆動装置と、
前記圧電駆動装置によって回転されるローターと、
を含む、モーター。 - 複数のリンク部と、
複数の前記リンク部を接続する関節部と、
複数の前記リンク部を前記関節部で回動させる請求項1ないし3のいずれか1項に記載の圧電駆動装置と、
を含む、ロボット。 - 請求項1ないし3のいずれか1項に記載の圧電駆動装置と、
液体を輸送するチューブと、
前記圧電駆動装置の駆動によって前記チューブを閉鎖する複数のフィンガーと、
を含む、ポンプ。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236651A JP2017103956A (ja) | 2015-12-03 | 2015-12-03 | 圧電駆動装置、モーター、ロボット、およびポンプ |
| CN201611089232.4A CN106877733B (zh) | 2015-12-03 | 2016-11-30 | 压电驱动装置、马达、机器人、以及泵 |
| US15/367,553 US10601345B2 (en) | 2015-12-03 | 2016-12-02 | Piezoelectric driving device, motor, robot, and pump |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015236651A JP2017103956A (ja) | 2015-12-03 | 2015-12-03 | 圧電駆動装置、モーター、ロボット、およびポンプ |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017103956A true JP2017103956A (ja) | 2017-06-08 |
| JP2017103956A5 JP2017103956A5 (ja) | 2018-12-06 |
Family
ID=59015784
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015236651A Withdrawn JP2017103956A (ja) | 2015-12-03 | 2015-12-03 | 圧電駆動装置、モーター、ロボット、およびポンプ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017103956A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019092280A (ja) * | 2017-11-14 | 2019-06-13 | Tdk株式会社 | 圧電アクチュエータ |
-
2015
- 2015-12-03 JP JP2015236651A patent/JP2017103956A/ja not_active Withdrawn
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019092280A (ja) * | 2017-11-14 | 2019-06-13 | Tdk株式会社 | 圧電アクチュエータ |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6405785B2 (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP6467809B2 (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP2017017916A (ja) | 圧電駆動装置、ロボット及び圧電駆動装置の駆動方法 | |
| JP6641944B2 (ja) | モーター用圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2016182016A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP2016152705A (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP2017175696A (ja) | 圧電駆動装置の制御回路、圧電駆動装置、超音波モーター、ロボット、ハンド、及びポンプ | |
| CN106877733B (zh) | 压电驱动装置、马达、机器人、以及泵 | |
| JP2017069998A (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2017022814A (ja) | 圧電駆動装置、ロボット及び圧電駆動装置の駆動方法 | |
| JP2016082834A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP6766328B2 (ja) | 圧電駆動装置、ロボット、及び圧電駆動装置の駆動方法 | |
| JP2016143755A (ja) | 圧電素子駆動回路、及び、ロボット | |
| JP2016040990A (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP2017103956A (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP6601174B2 (ja) | 圧電アクチュエーター、積層アクチュエーター、圧電モーター、ロボット、ハンド及び送液ポンプ | |
| JP2016040994A (ja) | 圧電駆動装置、ロボット、及び、それらの駆動方法 | |
| JP2016040984A (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP6662007B2 (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP2017103954A (ja) | 圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP6641910B2 (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP6641943B2 (ja) | モーター用圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ | |
| JP2017005925A (ja) | モーター用圧電駆動装置、モーター、ロボット、およびポンプ | |
| JP6702482B2 (ja) | 圧電駆動装置及びその駆動方法、ロボット及びその駆動方法 | |
| JP2017118625A (ja) | 圧電駆動装置およびその製造方法、モーター、ロボット、ならびにポンプ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181024 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181024 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190723 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190717 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20190905 |