JP2017229196A - 角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 - Google Patents
角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 Download PDFInfo
- Publication number
- JP2017229196A JP2017229196A JP2016125374A JP2016125374A JP2017229196A JP 2017229196 A JP2017229196 A JP 2017229196A JP 2016125374 A JP2016125374 A JP 2016125374A JP 2016125374 A JP2016125374 A JP 2016125374A JP 2017229196 A JP2017229196 A JP 2017229196A
- Authority
- JP
- Japan
- Prior art keywords
- angle
- motor
- error
- value
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/50—Machine control of apparatus for electrographic processes using a charge pattern, e.g. regulating differents parts of the machine, multimode copiers, microprocessor control
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/18—Estimation of position or speed
Abstract
【課題】 回転子の角度を精度よく推定することができる。【解決手段】 一実施形態に係る角度推定装置は、モータの実角度と角度推定値との差である角度誤差の関数である誤差パラメータの位相を、所定の補正量だけ補正することにより、補正誤差パラメータを計算する補正部と、前記補正誤差パラメータに基づいて、前記モータの速度推定値及び前記角度推定値を計算する推定部と、を備える。【選択図】 図1
Description
本発明は、角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置に関する。
モータをセンサレス制御するモータ制御装置は、回転子の角度(位置)を推定し、推定した角度に基づいて、モータを制御する。角度の推定方法として、高速駆動時に利用される誘起電圧を利用した方法や、低速駆動時に利用される高調波信号を利用した方法が知られている。いずれの推定方法を利用する場合であっても、モータを精度よく制御するためには、回転子の実角度θreを精度よく推定することが重要である。
このような推定方法として、従来、P(Proportional)制御やPI(Proportional Integral)制御により、角度推定値θestと実角度θreとの差である角度誤差θerrが0に近づくように角度推定値θestを計算する方法が利用されている。角度誤差θerrを直接的に得ることはできないため、上記の推定方法では、角度誤差θerrの代わりに、誤差パラメータXerrが利用される。誤差パラメータXerrは、ゼロ近傍で角度誤差θerrと比例関係とみなせる何らかのパラメータである。誤差パラメータXerrが0に近づくように角度推定値θestを計算することにより、実角度θreを精度よく推定することができる。
しかしながら、モータの特性や駆動条件によっては、誤差パラメータXerrが変動し、ゼロ近傍で角度誤差θerrと比例関係であるとみなせなくなることがあった。誤差パラメータXerrが変動すると、この変動に起因した誤差が角度推定値θestに生じ、実角度θreの推定精度が低下するという問題があった。
本発明は、上記の課題に鑑みてなされたものであり、回転子の角度を精度よく推定することを目的とする。
一実施形態に係る角度推定装置は、モータの実角度と角度推定値との差である角度誤差の関数である誤差パラメータの位相を、所定の補正量だけ補正することにより、補正誤差パラメータを計算する補正部と、前記補正誤差パラメータに基づいて、前記モータの速度推定値及び前記角度推定値を計算する推定部と、を備える。
本発明の各実施形態によれば、回転子の角度を精度よく推定することができる。
以下、本発明の各実施形態について、添付の図面を参照しながら説明する。なお、各実施形態に係る明細書及び図面の記載に関して、実質的に同一の機能構成を有する構成要素については、同一の符号を付することにより重畳した説明を省略する。
<第1実施形態>
第1実施形態に係るモータ駆動システムについて、図1〜図13を参照して説明する。本実施形態では、ブラシレスDCモータを駆動するモータ駆動システムについて説明する。
第1実施形態に係るモータ駆動システムについて、図1〜図13を参照して説明する。本実施形態では、ブラシレスDCモータを駆動するモータ駆動システムについて説明する。
(モータ駆動システムの構成)
図1は、本実施形態に係るモータ駆動システムの構成の一例を示す図である。図1のモータ駆動システムは、モータ1と、インバータ2と、電流検出器3と、モータ制御装置4と、を備える。インバータ2、電流検出器3、及びモータ制御装置4は、モータ1を駆動するモータ駆動装置を構成する。
図1は、本実施形態に係るモータ駆動システムの構成の一例を示す図である。図1のモータ駆動システムは、モータ1と、インバータ2と、電流検出器3と、モータ制御装置4と、を備える。インバータ2、電流検出器3、及びモータ制御装置4は、モータ1を駆動するモータ駆動装置を構成する。
モータ1は、3相のブラシレスDCモータである。モータ1の各相を、U相、V相、及びW相と称する。モータ1は、3相のコイル11(固定子)と、回転子12と、を備える。回転子12はS極及びN極が交互に並んだ永久磁石により構成され、p個の極ペア(S極及びN極のペア)を有する。
以下では、回転子12の1回転を1周期とする角度を機械角と称し、回転子12の1回転をp周期とする角度を電気角と称する。電気角は、機械角のp倍に相当する。以降、断りのない限り、回転子12の角度(位置)及び速度(角速度)を電気角で表す。
モータ1は、インバータ2から供給された電流によって駆動される。具体的には、モータ1は、インバータ2からU相、V相、及びW相のコイル11にそれぞれ電流Iu,Iv,Iwを供給される。モータ1の回転子12は、電流Iu,Iv,Iwに応じてU相、V相、及びW相のコイル11が発生させた磁界に従って回転する。
インバータ2は、モータ制御装置4が出力した電圧指令値Vu*,Vv*,Vw*に応じた電流Iu,Iv,Iwをモータ1に供給し、モータ1を駆動する。以下、*を付された値は、指令値(制御値)を示すものとする。電圧指令値Vu*,Vv*,Vw*は、U相、V相、及びW相のコイル11にそれぞれ印加する電圧の指令値である。
図2は、インバータ2の一例を示す図である。図2のインバータ2は、PWM(Pulse Width Modulation)回路21と、駆動回路22と、を備える。
PWM回路21は、電圧指令値Vu*をパルス幅変調して、U相のゲート信号(UH,UL)を生成し、出力する。また、PWM回路21は、電圧指令値Vv*をパルス幅変調して、V相のゲート信号(VH,VL)を生成し、出力する。また、PWM回路21は、電圧指令値Vw*をパルス幅変調して、W相のゲート信号(WH,WL)を生成し、出力する。図2の例では、ゲート信号は、High又はLowの電圧信号である。PWM回路21が出力したゲート信号は、駆動回路22に入力される。
駆動回路22は、U相の駆動回路22Uと、V相の駆動回路22Vと、W相の駆動回路22Wと、を備える。駆動回路22Uは、電源(Vcc)と出力端子との間に接続されたスイッチング素子と、出力端子と接地線(GND)との間に接続されたスイッチング素子と、各スイッチング素子に並列に接続されたダイオードと、により構成される。図2の例では、スイッチング素子は、MOSFET(Metal Oxide Semiconductor Field Effect Transistor)であるが、バイポーラトランジスタでもよい。
駆動回路22Uの出力端子は、U相のコイルに接続される。また、駆動回路22Uの各スイッチング素子は、PWM回路21が出力したU相のゲート信号を入力される。入力されたゲート信号に従って各スイッチング素子がオンオフすることにより、電圧指令値Vu*に応じた電流Iuが、U相のコイルに供給される。
なお、駆動回路22V,22Wの構成は、駆動回路22Uと同様であるため、説明を省略する。また、インバータ2は、図2に限られない。インバータ2として、電圧指令値Vu*,Vv*,Vw*に応じた電流Iu,Iv,Iwを供給可能な任意の回路を利用できる。
電流検出器3は、モータ1に供給された電流Iu,Iv,Iwの電流値Iu,Iv,Iwのうち少なくとも2つを検出し、出力する。以下では、電流検出器3は、電流値Iu,Ivを検出するものとする。電流検出器3が出力した電流値Iu,Ivは、モータ制御装置4に入力される。
図3は、電流検出器3の一例を示す図である。図3の電流検出器3は、U相の電流検出器3Uと、V相の電流検出器3Vと、を備える。電流検出器3Uは、シャント抵抗31uと、差動アンプ32uと、AD変換器33uと、を備える。
シャント抵抗31uは、駆動回路22Uの出力端子と、U相のコイル11と、の間に接続される。駆動回路22Uが電流Iuをコイル11に供給すると、電流Iuがシャント抵抗31uに流れ、シャント抵抗31uの抵抗値に応じた電圧降下が生じる。
差動アンプ32uは、シャント抵抗31uの両端に差動入力端子を接続され、シャント抵抗31uで生じた電圧降下(シャント抵抗31uの両端子間の電位差)を、所定の利得で増幅し、出力する。
AD変換器33uは、差動アンプ32uの出力信号をAD(Analog to Digital)変換し、得られたデジタル値を出力する。このデジタル値は、電流値Iuとしてモータ制御装置4に入力される。
なお、電流検出器3Vの構成は、電流検出器3Uと同様であるため、説明を省略する。また、電流検出器3は図3の構成に限られない。電流検出器3として、電流値Iu,Ivを検出可能な任意の回路を利用できる。
モータ制御装置4は、プロセッサと、メモリと、により構成される。プロセッサは、例えば、CPU(Central Processing Unit)、MPU(Micro Processing Unit)、DSP(Digital Signal Processor)などである。プロセッサは、ASIC(Application Specific Integrated Circuit)、FPGA(Field Programmable Gate Array)、PLD(Programmable Logic Device)などであってもよい。プロセッサは、メモリに格納されたプログラムを実行する。
メモリは、DRAM(Dynamic Random Access Memory)、SRAM(Static RAM)、MRAM(Magnetic RAM)、フラッシュメモリなどである。メモリは、プロセッサが実行するプログラムを格納する。
モータ制御装置4は、プロセッサ及びメモリを、それぞれ1つ備えてもよいし、複数備えてもよい。モータ制御装置4は、例えば、ICチップにより実現される。この場合、ICチップには、インバータ2及び電流検出器3の少なくとも一方が含まれてもよい。
モータ制御装置4は、速度指令値ωm*に基づいて、電圧指令値Vu*,Vv*,Vw*を計算し、出力する。速度指令値ωm*は、回転子12の速度(角速度)の指令値である。速度指令値ωm*は、機械角で表され、外部(例えば、上位のアプリケーション)から入力される。速度指令値ωm*は、予め設定されていてもよい。モータ制御装置4が出力した電圧指令値Vu*,Vv*,Vw*は、インバータ2に入力される。
図1に示すように、モータ制御装置4は、機能構成として、速度制御部41と、電流制御部42と、高調波重畳部43と、第1座標変換部44と、第2座標変換部45と、誤差パラメータ計算部46と、補正部47と、推定部48と、を備える。これらの機能構成は、プロセッサがプログラムを実行することにより実現される。本実施形態において、高調波重畳部43、誤差パラメータ計算部46、補正部47、及び推定部48は、モータ1の角度を推定する角度推定装置を構成する。
速度制御部41は、速度指令値ωm*と、速度推定値ωmestと、に基づいて、トルク指令値Te*を計算し、出力する。速度推定値ωmestは、機械角で表された回転子12の速度の推定値であり、推定部48から入力される。トルク指令値Te*は、モータ1に発生させるべきトルクの指令値である。速度制御部41は、P制御やPI制御により、速度推定値ωmestが速度指令値ωm*に一致するように、トルク指令値Te*を出力する。速度制御部41が出力したトルク指令値Te*は、電流制御部42に入力される。
電流制御部42は、トルク指令値Te*と、電流値Iγ,Iδと、に基づいて、電圧指令値Vγ*,Vδ*を計算し、出力する。電流値Iγは、モータ1に供給された電流のγ軸成分(γ軸電流)の計測値である。電流値Iδは、モータ1に供給された電流のδ軸成分(δ軸電流)の計測値である。電圧指令値Vγ*は、モータ1に印加する電圧のγ軸成分(γ軸電圧)の指令値である。電圧指令値Vδ*は、モータ1に印加する電圧のδ軸成分(δ軸電圧)の指令値である。γδ座標系について、詳しくは後述する。電流制御部42が出力した電圧指令値Vγ*,Vδ*は、高調波重畳部43に入力される。電流制御部42は、電流指令値計算部と、比例積分制御部と、を備える。
電流指令値計算部は、トルク指令値Te*に基づいて、電流指令値Iγ*,Iδ*を計算する。電流指令値Iγ*は、モータ1に供給する電流のγ軸成分(γ軸電流)の指令値である。電流指令値Iδ*は、モータ1に供給する電流のδ軸成分(δ軸電流)の指令値である。電流指令値計算部は、モータ1に与えるトルク値がトルク指令値Te*と一致するように、電流指令値Iγ*,Iδ*を計算する。
比例積分制御部は、電流指令値計算部が計算した電流指令値Iγ*,Iδ*と、電流値Iγ,Iδと、に基づいて、電圧指令値Vγ*,Vδ*を計算し、出力する。比例積分制御部は、P制御やPI制御により、電流値Iγ,Iδが電流指令値Iγ*,Iδ*と一致するように、電圧指令値Vγ*,Vδ*を計算する。
高調波重畳部43は、回転子12の角度誤差を推定するために、モータ1に印加する電圧に高調波電圧を重畳する。図4は、高調波重畳部43の一例を示す図である。図4の高調波重畳部43は、高調波生成部431と、加算部432と、を備える。
高調波生成部431は、高調波電圧を生成する。すなわち、高調波生成部431は、高調波指令値Vγh*,Vδh*を計算し、出力する。高調波指令値Vγh*は、モータ1に印加する電圧に重畳する高調波電圧のγ軸成分の指令値である。高調波指令値Vγδ*は、モータ1に印加する電圧に重畳する高調波電圧のδ軸成分の指令値である。高調波電圧が正弦波である場合、高調波指令値Vγh*,Vδh*は、例えば、以下の式で表される。

式(1)において、Vhfは高調波電圧の振幅、ωcは高調波電圧の角速度、tは時間である。高調波指令値Vγh*は、時間tにおける高調波電圧の振幅に相当する。また、高調波指令値Vγh*は、0である。
振幅Vhf及び角速度ωcは、予め設定される。角速度ωcは、回転子12の速度(角速度)より、十分に大きく設定される。回転子12の速度は、コイル11に印加する電圧の基本波成分の角速度に相当する。また、高調波生成部431は、角速度ωcに時間tを乗じた位相ωctを計算し、出力する。高調波生成部431が出力した位相ωctは、誤差パラメータ計算部46に入力される。
加算部432は、高調波指令値Vγh*を電圧指令値Vγ*に加算した電圧指令値Vmγ*を計算し、出力する。また、加算部432は、高調波指令値Vδh*を電圧指令値Vδ*に加算した電圧指令値Vmγ*を計算し、出力する。加算部432が出力した電圧指令値Vmγ*,Vmδ*は、第1座標変換部44に入力される。
第1座標変換部44は、角度推定値θestに基づいて、γδ座標系からUVW座標系への座標変換を行う。角度推定値θestとは、回転子12の角度の推定値である。第1座標変換部44は、電圧指令値Vmγ*,Vmδ*を座標変換することにより、電圧指令値Vu*,Vv*,Vw*を計算し、出力する。第1座標変換部44が出力した電圧指令値Vu*,Vv*,Vw*は、インバータ2に入力される。
第2座標変換部45は、角度推定値θestに基づいて、UVW座標系からγδ座標系への座標変換を行う。第2座標変換部45は、電流値Iu,Iv,Iwを座標変換することにより、電流値Iγ,Iδを計算し、出力する。第2座標変換部45が出力した電流値Iγ,Iδは、電流制御部42及び誤差パラメータ計算部46に入力される。
図5は、モータ1の制御に利用される座標系を模式的に示す図である。図5の実線はAB座標系、点線はUVW座標系、太線はdq座標系、破線はγδ座標系を示している。これらの各座標系の原点は共通である。
AB座標系は、直行するA軸及びB軸からなる固定座標系である。AB座標系は、第2実施形態で利用される。
UVW座標系は、互いに120度の位相差を有する、U軸、V軸、及びW軸からなる固定座標系である。図5の例では、U軸とA軸とは同位相である。U軸、V軸、及びW軸は、モータ1のU相、V相、及びW相にそれぞれ対応する。
dq座標系は、直行するd軸及びq軸からなる回転座標系である。U軸(A軸)に対するd軸の角度は、回転子12の実際の角度である実角度θreに相当する。すなわち、dq座標系は、回転子12の実際の位置を基準とした座標系に相当する。
回転子12の角度を計測するセンサを備えるモータ駆動システムでは、センサにより計測された実角度θreに基づいて、モータ1を制御する。しかしながら、本実施形態のように、モータ1をセンサレス制御する場合には、実角度θreを直接的に計測することができない。そこで、本実施形態では、モータ制御装置4は、実角度θreを推定し、得られた角度推定値θestに基づいて、モータ1を制御する。
γδ座標系は、直行するγ軸及びδ軸からなる回転座標系である。U軸(A軸)に対するγ軸の角度は、回転子12の角度推定値θestに相当する。すなわち、γδ座標系は、回転子12の推定された位置を基準とした座標系に相当する。実角度θreと角度推定値θestとの差が角度誤差θerrである。
角度推定値θestを用いると、UVW座標系からγδ座標系へ座標変換する変換行列Cは、以下の式で表される。
第1座標変換部44は、変換行列Cを用いて、以下の式により、電圧指令値Vu*,Vv*,Vw*を計算する。
また、第2座標変換部45は、電流値Iu,Ivに基づいて電流値Iwを計算し(Iw=−Iu−Iv)、変換行列Cを用いて、以下の式により、電流値Iγ,Iδを計算する。
誤差パラメータ計算部46は、コイル11に流れる電流から高調波電流を抽出し、高調波電流に含まれる誤差成分を、誤差パラメータXerrとして出力する。高調波電流は、高調波電圧に対応する電流成分(高調波成分)である。
図6は、誤差パラメータ計算部46の一例を示す図である。図6の誤差パラメータ計算部46は、BPF(Band Pass Filter)461と、乗算部462と、LPF(Low Pass Filter)463と、減算部464と、を備える。
BPF461は、角速度ωcに対応する周波数を含む所定の帯域を通過させ、他の帯域を減衰させるフィルタである。BPF461は、電流値Iγ,Iδから基本波成分を除去し、高調波成分を抽出し、高調波電流値Iγh,Iδhを出力する。高調波電流値Iγhは、高調波電流のγ軸成分の電流値である。高調波電流値Iγδは、高調波電流のδ軸成分の電流値である。BPF461が出力した高調波電流値Iγh,Iδhは、乗算部462に入力される。一般に、モータ1における高調波電流による電圧降下は小さいため、高調波電流値Iγh,Iδhは以下の式で近似できる。
式(5)において、kcはモータ特性やシステムの仕様で決まる定数、L0,L1はコイル11のインダクタンスで決まる定数である。θerrは、上述の通り、実角度θreと角度推定値θestとの差に相当する角度誤差である。これに対して、Δθerrは、モータ1の特性や駆動条件によって生じる角度誤差である。
乗算部462は、高調波電流に正弦波sin(ωct)を乗算するミキサである。乗算部462は、高調波電流値Iγh,Iδhに、sin(ωct)を乗算した値を出力する。高調波電流に位相ωctを有する正弦波を乗算すると、低域に誤差成分に応じたオフセットが生じる。誤差成分とは、高調波電流に含まれる、角度誤差θerr,Δθerrに対応する電流成分のことである。乗算部462が出力した値は、LPF463に入力される。
LPF463は、低域を通過させ、角速度ωcに対応する周波数を含む高域を減衰させるフィルタである。LPF463は、高調波電流に含まれる低域成分、すなわち、上記の誤差成分を抽出し、低域電流値IγhL,IδhLを出力する。LPF463が出力した低域電流値IγhL,IδhLは、減算部464に入力される。低域電流値IγhL,IδhLは、以下の式で表される。
減算部464は、低域電流値IγhL,IδhLからオフセット成分osfdを減算することにより、誤差電流値Iγerr,Iδerrを計算する。オフセット成分ofsdは、モータ特性、システムの仕様、コイル11のインダクタンスなどに応じて生じるオフセット成分である。誤差電流値Iγerrは、角度誤差θerr,Δθerrによって生じた電流の誤差成分(誤差電流)のγ軸成分の電流値である。誤差電流値Iδerrは、角度誤差θerr,Δθerrによって生じた電流の誤差成分(誤差電流)のδ軸成分の電流値である。オフセット成分ofsdは、以下の式で表される。
式(7)のオフセット成分ofsdを用いると、誤差電流値Iγerr,Iδerrは、以下の式で計算される。
減算部464は、こうして得られた誤差電流値Iγerr,Iδerrを出力する。本実施形態において、誤差電流値Iδerrが誤差パラメータXerrに相当する。出力された誤差電流値Iγerr,Iδerr(Xerr)は、補正部47に入力される。
図7は、誤差電流値Iδerrの一例を示す図である。図7において、実線は角度誤差Δθerrが0の場合の誤差電流値Iδerrを示し、破線は角度誤差Δθerrが0でない場合の誤差電流値Iδerrを示している。
図7に示すように、角度誤差Δθerrが0の場合、誤差電流値Iδerrは、ゼロクロス点(誤差電流値Iδerrが0となる角度誤差θerrの値)が0の正弦関数となる。したがって、誤差電流値Iδerrは、ゼロ近傍(角度誤差θerrが0に近い所定の範囲)で、角度誤差θerrに比例するとみなされる。
角度誤差Δθerrが0の場合、誤差電流値Iδerrを0に近づけることは、角度誤差θerrを0に近づけることに相当する。したがって、誤差電流値Iδerrが0に近づくように角度推定値θestを計算することにより、角度推定値θestを実角度θreに近づけることができる。このため、誤差電流値Iδerrは、誤差パラメータXerrとして利用される。
しかしながら、角度誤差Δθerrが0でない場合、図7に示すように、誤差電流値Iδerrの位相が角度誤差Δθerrだけ変動し、ゼロクロス点が0から離れる。この場合、誤差電流値Iδerrは、ゼロ近傍で角度誤差θerrに比例するとみなせなくなる。
角度誤差Δθerrが0でない場合、図7からわかるように、誤差電流値Iδerrを0に近づけても、角度誤差θerrが0に近づくとは限らない。このような誤差電流値Iδerrを誤差パラメータXerrとして利用すると、実角度θreの推定精度が低下する。そこで、本実施形態では、角度誤差Δθerrに応じて、誤差電流値Iδerr(誤差パラメータXerr)の位相を補正する。
補正部47は、誤差パラメータXerrの位相を、所定の位相補正量Δθphだけ補正する。位相を補正された誤差パラメータXerrを、補正誤差パラメータXecという。補正部47は、得られた補正誤差パラメータXecを出力する。出力された補正誤差パラメータXecは、推定部48に入力される。
位相補正量Δθphは、角度誤差Δθerrと一致するように選択されるのが好ましい。このような位相補正量Δθphの選択は、電流値Iγ,Iδや角度推定値θestと、角度誤差Δθerrと、の関係を示すテーブルや関数を利用することにより可能となる。上記のテーブルや関数は、角度センサを利用した実験により得られた角度誤差Δθerrのデータや、磁気シミュレーションを利用して得られた角度誤差Δθerrのデータに基づいて、用意することができる。
例えば、角度誤差Δθerrと、角度推定値Δθestと、の関係を示すテーブルが予め用意されている場合について考える。この場合、補正部47は、推定部48から角度推定値θestを取得し、取得した角度推定値θestに対応する角度誤差Δθerrを、位相補正量Δθphとして選択すればよい。
本実施形態では、誤差パラメータXerrは、誤差電流値Iδerrである。したがって、位相補正量Δθphが角度誤差Δθerrに十分近い場合、補正誤差パラメータXecは、以下の式で表される。
式(8)及び式(9)からわかるように、補正誤差パラメータXecは、位相を角度誤差Δθerr(位相補正量Δph)だけ変化させた誤差パラメータXerrに相当する。
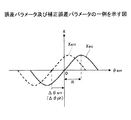
図8は、誤差パラメータXerr及び補正誤差パラメータXecの一例を示す図である。図8において、実線は補正誤差パラメータXecを示し、破線は誤差パラメータXerrを示している。
図8の例では、誤差パラメータXerrは、ゼロクロス点が角度誤差Δθerrだけずれている。この誤差パラメータXerrの位相を、角度誤差Δθerrだけ補正することにより、ゼロクロス点が0に一致した補正誤差パラメータXecを生成することができる。
推定部48は、補正誤差パラメータXecに基づいて、回転子12の実角度θre及び実速度ωmreを推定する。実速度ωmreは、機械角で表された回転子12の実際の速度である。すなわち、推定部48は、角度推定値θest及び速度推定値ωmestを計算する。図9は、推定部48の一例を示す図である。図9の推定部48は、誤差収束部481と、積分部482と、を備える。
誤差収束部481は、PI制御により、補正誤差パラメータXecが0に近づくように、速度推定値ωmestを計算し、出力する。具体的には、誤差収束部481は、補正誤差パラメータXecに比例ゲインKpを乗じた値と、補正誤差パラメータXecを積分(1/s)して積分ゲインKiを乗じた値と、の和を速度推定値ωmestとして出力する。出力された速度推定値ωmestは、速度制御部41及び積分部482に入力される。
積分部482は、速度推定値ωmestに基づいて、角度推定値θestを計算力する。具体的には、積分部482は、速度推定値ωmestに極ペア数pを乗じた値を積分(1/s)した値を、角度推定値θestとして出力する。これは、速度推定値ωmestが機械角で表されるのに対して、角度推定値θestは電気角で表されるためである。角度推定値θestは、以下の式で表される。
積分部482は、式(10)により得られた角度推定値θestを出力する。出力された角度推定値θestは、第1座標変換部44及び第2座標変換部45に入力される。
(モータ駆動システムの動作)
次に、本実施形態に係るモータ駆動システムの動作について説明する。図10は、本実施形態に係るモータ駆動システムの動作の一例を示すフローチャートである。
次に、本実施形態に係るモータ駆動システムの動作について説明する。図10は、本実施形態に係るモータ駆動システムの動作の一例を示すフローチャートである。
モータ1の駆動を開始すると、速度制御部41は、速度指令値ωm*と、速度推定値ωmestとの差が0になるようにトルク指令値Te*を計算し、出力する(ステップS101)。速度制御部41が出力したトルク指令値Te*は、電流制御部42に入力される。
電流制御部42は、トルク指令値Te*に基づいて電流指令値Iγ*,Iδを計算する。電流制御部42は、電流指令値Iγ*,Iδ*と、電流値Iγ,Iδと、の差が0になるように電圧指令値Vγ*,Vδ*を計算し、出力する(ステップS102)。電流制御部42が出力した電圧指令値Vγ*,Vδ*は、高調波重畳部43に入力される。
高調波重畳部43は、電圧指令値Vγ*,Vδ*に高調波指令値Vγh*,Vδh*を加算し、得られた電圧指令値Vmγ*,Vmδ*を出力する(ステップS103)。これは、コイル11に印加する電圧に、高調波電圧を重畳することに相当する。高調波重畳部43が出力した電圧指令値Vmγ*,Vmδ*は、第1座標変換部44に入力される。また、電圧指令値Vmγ*,Vmδ*の計算に利用された位相ωctは、誤差パラメータ計算部46に入力される。
第1座標変換部44は、電圧指令値Vmγ*,Vmδ*の座標系を、γδ座標系からUVW座標系に変換することにより、電圧指令値Vu*,Vv*,Vw*を計算し、出力する(ステップS104)。第1座標変換部44が出力した電圧指令値Vu*,Vv*,Vw*は、インバータ2に入力される。
インバータ2は、電圧指令値Vu*,Vv*,Vw*をパルス幅変調することにより、ゲート信号を生成する。インバータ2は、このゲート信号により駆動回路22のスイッチング素子をオンオフすることにより、電圧指令値Vu*,Vv*,Vw*に応じた電流Iu,Iv,Iwを3相のコイル11に供給する(ステップS105)。こうして供給された電流Iu,Iv,Iwにより、回転子12が回転する。すなわち、モータ1が駆動される。
電流検出器3は、U相及びV相のコイル11に流れる電流Iu,Ivの電流値Iu,Ivを検出し、出力する(ステップS106)。電流検出器3が出力した電流値Iu,Ivは、第2座標変換部45に入力される。
第2座標変換部45は、電流値Iu,Ivから電流値Iwを計算する。そして、第2座標変換部45は、電流値Iu,Iv,Iwの座標系を、UVW座標系からγδ座標系に変換することにより、電流値Iγ,Iδを計算し、出力する(ステップS107)。第2座標変換部45が出力した電流値Iγ,Iδは、電流制御部42及び誤差パラメータ計算部46に入力される。
誤差パラメータ計算部46は、電流値Iγ,Iδと、位相ωctと、に基づいて、誤差電流値Iγerr,Iδerrを計算し、出力する(ステップS108)。上述の通り、誤差電流値Iδerrは、誤差パラメータXerrに相当する。誤差パラメータ計算部46が出力した誤差電流値Iγerr,Iδerrは、補正部47に入力される。
補正部47は、誤差パラメータXerrの位相を、位相補正量Δθphだけ補正する。すなわち、補正部47は、誤差電流値Iγerr,Iδerrに基づいて、補正誤差パラメータXecを計算する(ステップS109)。補正部47が計算した補正誤差パラメータXecは、推定部48に入力される。
推定部48は、補正誤差パラメータXecが0に近づくように、速度推定値ωmestを計算し、出力する。推定部48が出力した速度推定値ωmestは、速度制御部41に入力される。また、推定部48は、速度推定値ωmestに基づいて、角度推定値θestを計算し、出力する(ステップS110)。推定部48が出力した角度推定値θestは、第1座標変換部44及び第2座標変換部45に入力される。
モータ駆動システムは、モータ1の駆動を終了するまで(ステップS111のNO)、ステップS101〜S110の処理を繰り返し実行する。
以上説明した通り、本実施形態によれば、誤差パラメータXerrの位相を補正することができる。このため、本実施形態によれば、モータ1の特性や駆動条件に起因して、誤差パラメータXerrに角度誤差Δθerrが生じた場合であっても、誤差パラメータXerrの位相を補正し、ゼロクロス点を角度誤差0(=θerr)に近づけることができる。これにより、角度誤差Δθerrによる影響を抑制し、回転子12の角度及び速度を精度よく推定することができる。また、精度よく推定された角度や速度を利用することにより、モータ1を精度よく制御することができる。
従来、誤差パラメータXerrの補正方法として、誤差パラメータXerrを振幅方向に補正する方法が知られている。図11は、従来の補正方法を説明する図である。図11の破線は誤差パラメータXerrを示し、実線は従来の補正方法により補正された誤差パラメータXerrを示す。
図11に示すように、従来の補正方法では、誤差パラメータXerrのゼロクロス点が0から離れている場合、誤差パラメータXerrが振幅方向に振幅補正量ΔXだけ補正された。この補正方法によれば、本実施形態と同様に、誤差パラメータXerrのゼロクロス点を0に近づけることができる。
しかしながら、誤差パラメータXerrを振幅方向に補正した場合、図11に示すように、ゼロ近傍における誤差パラメータXerrの傾きが緩やかになった。この結果、角度及び速度を推定するためのPI制御のループゲインが低下するという問題があった。
これに対して、本実施形態によれば、誤差パラメータXerrを補正しても、図8に示すように、ゼロ近傍における誤差パラメータXerrの傾きは緩やかにはならない。したがって、本実施形態によれば、上記従来の補正方法に比べて、PI制御のループゲインを向上させ、応答速度を向上させることができる。
また、上記従来の補正方法では、誤差パラメータXerrのピークの偏りを抑制できないため、適切なゼロクロス点に追従可能な、正又は負の角度誤差θerrの範囲(以下、「制御可能範囲」という)Rが狭くなった。例えば、図11の例では、誤差パラメータXerrのゼロクロス点が0である場合に比べて、正の制御可能範囲Rが狭くなっている。この結果、外乱などの影響により、角度誤差θerrが制御可能範囲Rを超えやすくなり、モータ1の制御が不安定になるという問題があった。
これに対して、本実施形態によれば、図8に示すように、誤差パラメータXerrのピークの偏りを抑制し、制御可能範囲Rを広くすることができる。この結果、上記従来の補正方法に比べて、モータ1の制御を安定させることができる。
なお、本実施形態に係る補正方法(位相の補正)と、上記従来の補正方法(振幅方向の補正)と、を併用して、誤差パラメータXerrを補正することも可能である。
また、誤差パラメータXerrは、誤差電流値Iδerrに限られない。誤差パラメータXerrとして、角度誤差Δθerrが0である場合にゼロ近傍で角度誤差θerrに比例する任意のパラメータを利用できる。また、誤差パラメータXerrは、誤差電流Iδerrのような正弦波に限られず、のこぎり波などであってもよい。
図12は、画像形成装置の一例を示す図である。図12の画像形成装置5は、プリンタ機能を備える。画像形成装置5は、スキャナ機能やFAX機能などを備えてもよい。画像形成装置5は、給紙ローラ51や紙搬送ローラ52などのローラを備える。本実施形態に係るモータ駆動システムは、これらのローラを駆動するためのモータの駆動システムとして利用できる。
図13は、搬送装置の一例を示す図である。図13の搬送装置6は、紙、紙幣、プリプレグなどのシート状の対象物を搬送する任意の装置である。搬送装置6は、画像形成装置5に搭載されていてもよい。搬送装置6は、対象物を搬送するための搬送ローラ61を備える。本実施形態に係るモータ駆動システムは、これらのローラを駆動するためのモータの駆動システムとして利用できる。
なお、本実施形態に係るモータ駆動システムは、画像形成装置5や搬送装置6に限られず、自動車、ロボット、アミューズメント機器など、ステッピングモータを搭載した任意の装置に適用可能である。
<第2実施形態>
第2実施形態に係るモータ駆動システムについて、図14を参照して説明する。本実施形態では、ステッピングモータを駆動するモータ駆動システムについて説明する。
第2実施形態に係るモータ駆動システムについて、図14を参照して説明する。本実施形態では、ステッピングモータを駆動するモータ駆動システムについて説明する。
(モータ駆動システムの構成)
図14は、本実施形態に係るモータ駆動システムの構成の一例を示す図である。図14のモータ駆動システムは、モータ1と、インバータ2と、電流検出器3と、モータ制御装置4と、を備える。以下、第1実施形態との相違点を中心に説明する。
図14は、本実施形態に係るモータ駆動システムの構成の一例を示す図である。図14のモータ駆動システムは、モータ1と、インバータ2と、電流検出器3と、モータ制御装置4と、を備える。以下、第1実施形態との相違点を中心に説明する。
モータ1は、2相のステッピングモータである。モータ1の各相を、A相及びB相と称する。モータ1は、2相のコイル11(固定子)と、回転子12と、を備える。モータ1は、インバータ2からA相及びB相のコイル11にそれぞれ電流Ia,Ibを供給される。モータ1の回転子12は、電流Ia,Ibに応じてA相及びB相のコイル11が発生させた磁界に従って回転する。
インバータ2は、モータ制御装置4が出力した電圧指令値Va*,Vb*に応じた電流Ia,Ibをモータ1に供給し、モータ1を駆動する。電圧指令値Va*,Vb*、A相及びB相のコイル11にそれぞれ印加する電圧の指令値である。インバータ2の構成は、2相構成であることを除き、第1実施形態と同様である。
電流検出器3は、A相及びB相のコイル11に流れる電流Ia,Ibの電流値Ia,Ibを検出し、出力する。電流検出器3が出力した電流値Ia,Ibは、第2座標変換部45に入力される。電流検出器3の構成は、第1実施形態と同様である。
本実施形態において、モータ制御装置4は、回転子12の回転により生じる誘起電圧を利用して、回転子12の角度及び速度を推定する。このため、モータ制御装置4は、高調波重畳部43を備えない。電流制御部42が出力した電圧指令値Vγ*,Vδ*は、第1座標変換部44に入力される。また、モータ1が2相のステッピングモータであるため、第1座標変換部44及び第2座標変換部45は、γδ座標系とAB座標系との間の座標変換を行う。また、誤差パラメータXerr及び補正誤差パラメータXecが第1実施形態とは異なる。
以下では、第1座標変換部44、第2座標変換部45、誤差パラメータ計算部46、及び補正部47について、説明する。他の構成は、第1実施形態と同様である。
第1座標変換部44は、角度推定値θestに基づいて、γδ座標系からAB座標系への座標変換を行う。第1座標変換部44は、電圧指令値Vγ*,Vδ*を座標変換することにより、電圧指令値Va*,Vb*を計算し、出力する。第1座標変換部44が出力した電圧指令値Va*,Vb*は、インバータ2に入力される。
第2座標変換部45は、角度推定値θestに基づいて、AB座標系からγδ座標系への座標変換を行う。第2座標変換部45は、電流値Ia,Ibを座標変換することにより、電流値Iγ,Iδを計算し、出力する。第2座標変換部45が出力した電流値Iγ,Iδは、電流制御部42及び誤差パラメータ計算部46に入力される。
角度推定値θestを用いると、AB座標系からγδ座標系へ座標変換する変換行列Rは、以下の式で表される。
第1座標変換部44は、変換行列Rを用いて、以下の式により、電圧指令値Va*,Vb*を計算する。
また、第2座標変換部45は、変換行列Rを用いて、以下の式により、電流値Iγ,Iδを計算する。
誤差パラメータ計算部46は、回転子12の回転により生じる誘起電圧を利用して、角度誤差を推定する。誘起電圧を利用した推定方法は、モータ1の中速〜高速駆動時に好適に利用できる。誘起電圧を利用した角度誤差の推定方法として、例えば、拡張誘起電圧を利用する方法が知られている。この推定方法では、以下の拡張誘起電圧モデルが利用される。
式(14)〜(16)において、Rはコイル抵抗、Ldはインダクタンスのd軸成分、Lqはインダクタンスのq軸成分、Ψaは回転子12による鎖交磁束である。これらのパラメータは、モータ1の特性により決まる。また、ρは微分演算子、pは極ペア数、eγは誘起電圧のγ軸成分、eδは誘起電圧のδ軸成分、Eexは拡張誘起電圧である。
ここで、モータ1が定速で回転し、速度推定値ωmestと実速度ωmreとがほぼ等しく、電流値Iγ,Iδがほぼ一定とし、式(15)の正弦関数及び余弦関数について整理すると、以下の式が得られる。
本実施形態では、式(17)の正弦関数sin(θerr+Δθerr)が、誤差パラメータXerrに相当する。すなわち、誤差パラメータ計算部46は、式(17)を計算することにより、誤差パラメータXerrを計算できる。なお、式(17)における実速度ωmreは得られないため、誤差パラメータ計算部46は、実速度ωmreの代わりに、速度指令値ωm*又は速度推定値ωmest*を用いて式(17)は計算すればよい。
誤差パラメータ計算部46は、こうして得られた上記の正弦関数の値(誤差パラメータΔθerr)及び余弦関数の値を出力する。誤差パラメータ計算部46が出力した値は、補正部47に入力される。
補正部47は、誤差パラメータXerrの位相を、所定の位相補正量Δθphだけ補正する。位相補正量Δθphが角度誤差Δθerrに十分近い場合、補正誤差パラメータXecは、以下の式で表される。
式(17)及び式(18)からわかるように、補正誤差パラメータXecは、位相を角度誤差Δθerr(位相補正量Δph)だけ変化させた誤差補正パラメータXerrに相当する。補正部47は、こうして得られた補正誤差パラメータXecを出力する。補正部47が出力した補正誤差パラメータXecは、推定部48に入力される。
以上のような構成により、本実施形態によれば、モータ1が2相のステッピングモータの場合であっても、第1実施形態と同様に、モータ1を制御することができる。したがって、第1実施形態と同様の効果が得られる。
なお、上記実施形態に挙げた構成等に、その他の要素との組み合わせなど、ここで示した構成に本発明が限定されるものではない。これらの点に関しては、本発明の趣旨を逸脱しない範囲で変更することが可能であり、その応用形態に応じて適切に定めることができる。
1:モータ
2:インバータ
3:電流検出器
4:モータ制御装置
5:画像形成装置
6:搬送装置
41:速度制御部
42:電流制御部
43:高調波重畳部
44:第1座標変換部
45:第2座標変換部
46:誤差パラメータ計算部
47:補正部
48:推定部
2:インバータ
3:電流検出器
4:モータ制御装置
5:画像形成装置
6:搬送装置
41:速度制御部
42:電流制御部
43:高調波重畳部
44:第1座標変換部
45:第2座標変換部
46:誤差パラメータ計算部
47:補正部
48:推定部
市川,陳,冨田,道木,大熊「拡張誘起電圧モデルに基づく突極型永久磁石同期モータのセンサレス制御」 電学論D編,122巻,12号,平成14年
Matthew J. Corley and Robert D. Lorenz, "Rotor Position and Velocity Estimation for a Salient-Pole Permanent Magnet Synchronous Machine at Standstill and High Speeds", IEEE TRANSACTIONS ON INDUSTRY APPLICATIONS, VOL. 34, NO. 4, JULY/AUGUST 1998
Claims (10)
- モータの実角度と角度推定値との差である角度誤差の関数である誤差パラメータの位相を、所定の補正量だけ補正することにより、補正誤差パラメータを計算する補正部と、
前記補正誤差パラメータに基づいて、前記モータの速度推定値及び前記角度推定値を計算する推定部と、
を備える角度推定装置。 - 前記補正部は、前記補正誤差パラメータのゼロクロス点が、前記誤差パラメータのゼロクロス点より、角度誤差0に近くなるように、前記誤差パラメータを補正する
請求項1に記載の角度推定装置。 - 前記補正誤差パラメータは、ゼロ近傍で前記角度誤差に比例する
請求項1又は請求項2に記載の角度推定装置。 - 前記誤差パラメータは、前記角度誤差の正弦関数である
請求項1乃至請求項3のいずれか1項に記載の角度推定装置。 - 前記モータに供給された電流の電流値に基づいて、前記誤差パラメータを計算する誤差パラメータ計算部を更に備える
請求項1乃至請求項4のいずれか1項に記載の角度推定装置。 - 請求項1乃至請求項5のいずれか1項に記載の前記角度推定装置と、
前記速度推定値が速度指令値に一致するように、電圧指令値を計算する制御部と、
を備えるモータ制御装置。 - 請求項6に記載の前記モータ制御装置と、
前記電圧指令値に応じた電流を前記モータに供給するインバータと、
前記モータに供給された電流の電流値を検出する電流検出器と、
を備えるモータ駆動装置。 - 請求項7に記載の前記モータ駆動装置と、
前記モータと、
を備えるモータ駆動システム。 - 請求項8に記載の前記モータ駆動システムを備える画像形成装置。
- 請求項8に記載の前記モータ駆動システムを備える搬送装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016125374A JP2017229196A (ja) | 2016-06-24 | 2016-06-24 | 角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 |
| US15/623,718 US10133223B2 (en) | 2016-06-24 | 2017-06-15 | Angle estimator, motor controller, motor driver, motor driving system, image forming apparatus, and conveyance device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016125374A JP2017229196A (ja) | 2016-06-24 | 2016-06-24 | 角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017229196A true JP2017229196A (ja) | 2017-12-28 |
Family
ID=60677706
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016125374A Pending JP2017229196A (ja) | 2016-06-24 | 2016-06-24 | 角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10133223B2 (ja) |
| JP (1) | JP2017229196A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019146419A (ja) * | 2018-02-22 | 2019-08-29 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| JP2019161919A (ja) * | 2018-03-14 | 2019-09-19 | 株式会社リコー | 駆動装置、駆動システム、画像形成装置、および搬送装置 |
| WO2023026352A1 (ja) * | 2021-08-24 | 2023-03-02 | 三菱電機株式会社 | 回転機の制御装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10668822B2 (en) * | 2017-07-25 | 2020-06-02 | GM Global Technology Operations LLC | Elimination of fundamental harmonic position measurement errors in a vector-based position sensing system |
| JP7161319B2 (ja) * | 2018-06-20 | 2022-10-26 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
| DE102018130972A1 (de) * | 2018-12-05 | 2020-06-10 | HELLA GmbH & Co. KGaA | Vorrichtung, Anordnung und Verfahren zur Bestimmung eines Winkels zwischen einem Rotor und einem Stator |
| JP7236311B2 (ja) * | 2019-04-01 | 2023-03-09 | キヤノン株式会社 | モータ制御装置及び画像形成装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6462491B1 (en) * | 1999-01-27 | 2002-10-08 | Matsushita Electric Industrial Co., Ltd. | Position sensorless motor control apparatus |
| JP4687846B2 (ja) | 2001-03-26 | 2011-05-25 | 株式会社安川電機 | 同期電動機の磁極位置推定方法および制御装置 |
| JP4716118B2 (ja) * | 2006-03-29 | 2011-07-06 | 株式会社ジェイテクト | モータ制御装置 |
| JP4587110B2 (ja) | 2007-06-01 | 2010-11-24 | 有限会社シー・アンド・エス国際研究所 | 同期電動機駆動制御のための回転子位相推定方法 |
| JP4959460B2 (ja) | 2007-07-30 | 2012-06-20 | 株式会社リコー | モータ起動装置及びモータ起動方法 |
| JP2010115090A (ja) | 2008-11-10 | 2010-05-20 | Ricoh Co Ltd | モータ駆動装置 |
| JP5636663B2 (ja) | 2009-10-19 | 2014-12-10 | 株式会社リコー | モータ駆動制御装置及び画像形成装置 |
| JP6014989B2 (ja) | 2011-10-28 | 2016-10-26 | 株式会社リコー | モータ駆動制御装置及び方法 |
| JP5919730B2 (ja) | 2011-10-28 | 2016-05-18 | 株式会社リコー | モータ駆動制御装置及び方法 |
| JP6232852B2 (ja) * | 2013-08-30 | 2017-11-22 | 株式会社島津製作所 | モータ制御装置およびターボ分子ポンプ |
| US9876452B1 (en) * | 2016-12-16 | 2018-01-23 | Semiconductor Components Industries, Llc | Rotor position sensing system for permanent magnet synchronous motors and related methods |
-
2016
- 2016-06-24 JP JP2016125374A patent/JP2017229196A/ja active Pending
-
2017
- 2017-06-15 US US15/623,718 patent/US10133223B2/en active Active
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019146419A (ja) * | 2018-02-22 | 2019-08-29 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| JP7012931B2 (ja) | 2018-02-22 | 2022-01-31 | 東芝インフラシステムズ株式会社 | インバータ制御装置および電動機駆動システム |
| JP2019161919A (ja) * | 2018-03-14 | 2019-09-19 | 株式会社リコー | 駆動装置、駆動システム、画像形成装置、および搬送装置 |
| JP7077685B2 (ja) | 2018-03-14 | 2022-05-31 | 株式会社リコー | 駆動装置、駆動システム、画像形成装置、および搬送装置 |
| WO2023026352A1 (ja) * | 2021-08-24 | 2023-03-02 | 三菱電機株式会社 | 回転機の制御装置 |
| JP7362004B2 (ja) | 2021-08-24 | 2023-10-16 | 三菱電機株式会社 | 回転機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US10133223B2 (en) | 2018-11-20 |
| US20170373617A1 (en) | 2017-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017229196A (ja) | 角度推定装置、モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 | |
| JP5550672B2 (ja) | モータ制御装置 | |
| JP6367332B2 (ja) | インバータ制御装置及びモータ駆動システム | |
| US11237021B2 (en) | Failure determination device for rotating machine control device and failure determination method | |
| JP6279151B2 (ja) | 交流回転機の制御装置および電動パワーステアリング装置 | |
| TWI411218B (zh) | 永久磁石同步電動機之控制裝置 | |
| US20170264227A1 (en) | Inverter control device and motor drive system | |
| JP2012170251A (ja) | モータ制御装置 | |
| JP5709932B2 (ja) | 同期機制御装置 | |
| WO2015019495A1 (ja) | モータ駆動システムおよびモータ制御装置 | |
| TW201618450A (zh) | 交流旋轉機之控制裝置及磁極位置補正量演算方法 | |
| JP5321792B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP2018007532A (ja) | モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 | |
| WO2019092777A1 (ja) | 電動機制御装置及び電動パワーステアリング装置 | |
| JP5104219B2 (ja) | 永久磁石形同期電動機の制御装置 | |
| JP6135713B2 (ja) | モータ制御装置、磁束指令の生成装置および磁束指令の生成方法 | |
| JP2010035352A (ja) | 同期電動機のロータ位置推定装置 | |
| JP2018007533A (ja) | モータ制御装置、モータ駆動装置、モータ駆動システム、画像形成装置、及び搬送装置 | |
| JP6766398B2 (ja) | 磁石温度推定方法、及び、磁石温度推定装置 | |
| JP2010148324A (ja) | モータ制御装置 | |
| JP2020010566A (ja) | モータ制御装置 | |
| JP2010268599A (ja) | 永久磁石モータの制御装置 | |
| JP2018125955A (ja) | モータ制御装置 | |
| KR102409792B1 (ko) | 영구 자석 동기 전동기의 제어 장치, 마이크로 컴퓨터, 전동기 시스템 및 영구 자석 동기 전동기의 운전 방법 | |
| JP5744151B2 (ja) | 電動機の駆動装置および電動機の駆動方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190227 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200303 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201006 |