JP2017164876A - 制御装置、ロボット、及びロボットシステム - Google Patents
制御装置、ロボット、及びロボットシステム Download PDFInfo
- Publication number
- JP2017164876A JP2017164876A JP2016054959A JP2016054959A JP2017164876A JP 2017164876 A JP2017164876 A JP 2017164876A JP 2016054959 A JP2016054959 A JP 2016054959A JP 2016054959 A JP2016054959 A JP 2016054959A JP 2017164876 A JP2017164876 A JP 2017164876A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- hand
- control device
- mode
- predetermined
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images
















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/0081—Programme-controlled manipulators with master teach-in means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J15/00—Gripping heads and other end effectors
- B25J15/08—Gripping heads and other end effectors having finger members
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1602—Programme controls characterised by the control system, structure, architecture
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1633—Programme controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1679—Programme controls characterised by the tasks executed
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/42—Recording and playback systems, i.e. in which the programme is recorded from a cycle of operations, e.g. the cycle of operations being manually controlled, after which this record is played back on the same machine
- G05B19/423—Teaching successive positions by walk-through, i.e. the tool head or end effector being grasped and guided directly, with or without servo-assistance, to follow a path
Abstract
Description
この構成により、制御装置は、ロボットの位置及び姿勢を記憶する際、ハンドに加わる外力が所定条件を満たすまでロボットを動かす第1モードと、ロボットが備える第1部位に加えられた外力に基づきロボットを動かす第2モードとを切り替える。これにより、制御装置は、第1モードと第2モードとのいずれかによって、ロボットの位置及び姿勢を高い精度で所望の位置及び姿勢へと変化させることができる。
この構成により、制御装置は、第1モードにおいて、所定条件が満たされるまで、力検出部の出力に基づく制御によってハンドを対象物に近づける。これにより、制御装置は、第1モードにおいて、ユーザーによりハンドに外力を加えさせることなく、ロボットの位置及び姿勢を、対象物に対応付けられた所望の位置及び姿勢へと高い精度で変化させることができる。
この構成により、制御装置は、第1モードにおいて、ハンドに加わる外力のうちの少なくとも第1方向に向かう外力が0より大きくなり、且つ、ハンドに加わる外力のうちの少なくとも第2方向に向かう外力が0となるまでロボットを動かす。これにより、制御装置は、第1モードにおいて、ロボットの姿勢を保持したまま、第1方向と反対の方向に向かってロボットの位置を移動させることができる。
この構成により、制御装置は、第1モードにおいて、ハンドに加わる力のうちの少なくとも並進方向である第1方向に向かう力が0より大きくなり、且つ、回転方向である第2方向に向かうモーメントが0となるまでロボットを動かす。これにより、制御装置は、第1モードにおいて、ロボットの姿勢を保持したまま、並進方向である第1方向と反対の方向に向かってロボットの位置を移動させることができる。
この構成により、制御装置は、第1モードにおいて、所定条件が満たされた場合、現在のロボットの位置及び姿勢を記憶する。これにより、制御装置は、第1モードにおいて、所定条件を満たされた場合に記憶されたロボットの位置及び姿勢に基づいてロボットを動作させることができる。
この構成により、制御装置は、第2モードにおいて、ロボットが備える第1部位に加えられた外力に基づいて、ロボットが備える第2部位を所定方向に所定量だけ移動させる。これにより、制御装置は、第2モードにおいて、ユーザーにより第1部位に加えられる外力に基づいて、ロボットの位置及び姿勢を高い精度で所望の位置及び姿勢へと変化させることができる。
この構成により、制御装置は、第2部位を所定方向に所定量だけ移動させた後、現在のロボットの位置及び姿勢を記憶する。これにより、制御装置は、第2モードにおいて、第2部位を所定方向に所定量だけ移動させた後に記憶されたロボットの位置及び姿勢に基づいてロボットを制御することができる。
この構成により、制御装置は、第2部位を並進方向と回転方向のうちいずれか一方又は両方に所定量だけ移動させた後、現在のハンドの位置及び姿勢を記憶する。これにより、制御装置は、第2モードにおいて、第2部位を並進方向と回転方向のうちいずれか一方又は両方に所定量だけ移動させた後に記憶された位置及び姿勢に基づいてロボットを制御することができる。
この構成により、制御装置は、ロボットが備える第1部位に加えられた外力に応じて、第1部位の部分のうちの当該外力が加わった部分に応じた方向に第2部位を所定量だけ移動させる。これにより、制御装置は、第2部位を移動させる方向をユーザーに容易に変更させることができる。
この構成により、ロボットは、ロボットの位置及び姿勢を記憶する際、ハンドに加わる外力が所定条件を満たすまでロボットを動かす第1モードと、ロボットが備える第1部位に加えられた外力に基づきロボットを動かす第2モードとを切り替える。これにより、ロボットは、第1モードと第2モードとのいずれかによって、ロボットの位置及び姿勢を高い精度で所望の位置及び姿勢へと変化させることができる。
この構成により、ロボットシステムは、ロボットの位置及び姿勢を記憶する際、ハンドに加わる外力が所定条件を満たすまでロボットを動かす第1モードと、ロボットが備える第1部位に加えられた外力に基づきロボットを動かす第2モードとを切り替える。これにより、ロボットシステムは、第1モードと第2モードとのいずれかによって、ロボットの位置及び姿勢を高い精度で所望の位置及び姿勢へと変化させることができる。
以下、本発明の実施形態について、図面を参照して説明する。
まず、ロボットシステム1の構成について説明する。
図1は、本実施形態に係るロボットシステム1の構成の一例を示す図である。ロボットシステム1は、ロボット20と、制御装置25を備える。制御装置25は、ロボット制御装置30と、ロボット制御装置30と別体の教示装置50とによって構成される。なお、制御装置25は、これに代えて、ロボット制御装置30と教示装置50とが一体となって構成されてもよい。この場合、制御装置25は、以下で説明するロボット制御装置30及び教示装置50の機能を有する。
エンドエフェクターEは、この一例において、物体を把持可能な指部を備えるエンドエフェクターである。なお、エンドエフェクターEは、当該指部を備えるエンドエフェクターに代えて、空気の吸引や磁力、治具等によって物体を持ち上げることが可能なエンドエフェクターや、他のエンドエフェクターであってもよい。
以下、ロボット制御装置30がロボット20を動作させる処理の概要について説明する。
以下、教示装置50がロボット制御装置30に教示する教示点について説明する。
教示装置50は、ロボット制御装置30に教示する教示点として、最終目標教示点と待機教示点とを教示する。すなわち、教示装置50は、最終目標教示点及び待機教示点のそれぞれを示す教示点情報を生成する。そして、教示装置50は、生成した当該教示点情報をロボット制御装置30に出力して記憶させる。
以下、図2を参照し、ロボット制御装置30及び教示装置50のハードウェア構成について説明する。図2は、ロボット制御装置30及び教示装置50のハードウェア構成の一例を示す図である。図2は、ロボット制御装置30のハードウェア構成(図2における30番台の符号が付された機能部)と、教示装置50のハードウェア構成(図2における50番台の符号が付された機能部)とを便宜的に重ねて示した図である。
記憶部32は、例えば、HDD(Hard Disk Drive)やSSD(Solid State Drive)、EEPROM(Electrically Erasable Programmable Read−Only Memory)、ROM(Read−Only Memory)、RAM(Random Access Memory)等を含む。なお、記憶部32は、ロボット制御装置30に内蔵されるものに代えて、USB等のデジタル入出力ポート等によって接続された外付け型の記憶装置であってもよい。記憶部32は、ロボット制御装置30が処理する各種情報や画像、動作プログラムを含む各種のプログラム、教示点情報を格納する。
通信部34は、例えば、USB等のデジタル入出力ポートやイーサネット(登録商標)ポート等を含んで構成される。
表示部35は、例えば、液晶ディスプレイパネル、あるいは、有機EL(ElectroLuminescence)ディスプレイパネルである。
記憶部52は、例えば、HDDやSSD、EEPROM、ROM、RAM等を含む。なお、記憶部52は、教示装置50に内蔵されるものに代えて、USB等のデジタル入出力ポート等によって接続された外付け型の記憶装置であってもよい。記憶部52は、教示装置50が処理する各種情報や画像、各種のプログラムを格納する。
通信部54は、例えば、USB等のデジタル入出力ポートやイーサネット(登録商標)ポート等を含んで構成される。
表示部55は、例えば、液晶ディスプレイパネル、あるいは、有機ELディスプレイパネルである。
以下、図3を参照し、ロボット制御装置30及び教示装置50の機能構成について説明する。図3は、ロボット制御装置30及び教示装置50の機能構成の一例を示す図である。
記憶制御部363は、教示装置50から取得した教示点情報を記憶部32に記憶させる。
情報読出部364は、記憶部32から各種の情報を読み出す。
動作モード切替部365は、教示装置50から取得した指示のうちの動作モード切替指示に基づいて、当該動作モード切替指示が示すモードにロボット制御装置30の動作モードを切り替える。
ロボット制御部367は、力検出情報取得部361が力検出部21から取得した力検出情報に基づいて、ロボット制御装置30の現在の動作モードに応じた動作をロボット20に行わせる。また、ロボット制御部367は、記憶制御部363が記憶部32に記憶させた教示点情報に基づいてロボット20を動作させる。
指示情報生成部563は、表示制御部561が表示部55に表示させた画面からユーザーにより受け付けられた操作に基づいて、ロボット制御装置30に出力する各種の指示を生成する。
指示情報出力部565は、指示情報生成部563が生成した指示をロボット制御装置30に出力する。
以下、図4を参照し、教示装置50がロボット制御装置30に各種の指示を出力する処理について説明する。図4は、教示装置50がロボット制御装置30に各種の指示を出力する処理の流れの一例を示すフローチャートである。なお、図4に示したフローチャートでは、ロボット制御装置30に各種の指示を出力する操作をユーザーから受け付けるメイン画面がすでに表示制御部561により表示部55に表示されている場合について説明する。
以下、図5を参照し、ロボット制御装置30が動作モード切替指示に基づいて動作モードを切り替える処理について説明する。図5は、ロボット制御装置30が動作モード切替指示に基づいて動作モードを切り替える処理の流れの一例を示すフローチャートである。
以下、図6を参照し、ロボット制御装置30が位置姿勢情報出力指示に基づいて現在の制御点T1の位置及び姿勢を示す情報を教示装置50に出力する処理について説明する。図6は、ロボット制御装置30が位置姿勢情報出力指示に基づいて現在の制御点T1の位置及び姿勢を示す情報を教示装置50に出力する処理の流れの一例を示すフローチャートである。
以下、図7〜図15を参照し、動作モードが第2モードの場合にロボット制御装置30がロボット20を動作させる処理について説明する。図7は、動作モードが第2モードの場合にロボット制御装置30がロボット20を動作させる処理の流れの一例を示すフローチャートである。
上記において説明した所定方向は、ハンドHの部分に応じた方向であってもよい。当該部分は、外力が加えられた部分のことである。すなわち、ロボット制御部367は、ハンドHに加えられた外力に基づいて、ハンドHの部分のうちの当該外力が加わった部分に応じた方向にハンドHを所定量だけ移動させる。これにより、ロボット制御部367は、ハンドHを移動させる方向をユーザーに容易に変更させることができる。
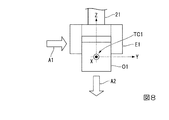
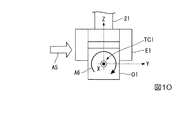
以下、図16〜図18を参照し、動作モードが第1モードの場合にロボット制御装置30がロボット20を動作させる処理について説明する。
2)ハンドHに加えられた力のうちの制御点座標系TC1のX軸方向及びY軸方向に加えられた力の大きさが0[N]であること
3)ハンドHに加えられたモーメントのうちの制御点座標系TC1の各座標軸それぞれの周りのモーメントの大きさが0[N・m]であること
上記において説明したように、第1モード及び第2モードにおいてロボット20を動作させた場合、ロボット制御装置30は、ハンドHの位置及び姿勢の調整を精度よく行うことができる。すなわち、ロボット制御装置30は、ハンドHの位置及び姿勢の微調整を行うことができる。
また、上記のプログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、上記のプログラムは、前述した機能をコンピューターシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
Claims (11)
- ハンドと力検出部を備えるロボットの位置及び姿勢を記憶する際、前記ハンドに加わる外力が所定条件を満たすまで前記ロボットを動かす第1モードと、前記ロボットが備える第1部位に加えられた外力に基づき前記ロボットを動かす第2モードとを切り替える、
制御装置。 - 前記第1モードにおいて、前記所定条件が満たされるまで、前記力検出部の出力に基づく制御によって前記ハンドを対象物に近づける、
請求項1に記載の制御装置。 - 前記所定条件は、前記ハンドに加わる外力のうちの少なくとも第1方向に向かう外力が0より大きくなり、且つ、前記ハンドに加わる外力のうちの少なくとも前記第1方向と異なる第2方向に向かう外力が0となることである、
請求項1又は2に記載の制御装置。 - 前記第1方向は、並進方向であり、
前記第2方向は、回転方向である、
請求項3に記載の制御装置。 - 前記第1モードにおいて、前記所定条件が満たされた場合、現在の前記位置及び姿勢を記憶する、
請求項1から4のうちいずれか一項に記載の制御装置。 - 前記第2モードにおいて、前記第1部位に加えられた外力に基づいて、前記ロボットが備える第2部位を所定方向に所定量だけ移動させる、
請求項1から5のうちいずれか一項に記載の制御装置。 - 前記第2部位を前記所定方向に前記所定量だけ移動させた後、現在の前記位置及び姿勢を記憶する、
請求項6に記載の制御装置。 - 前記所定方向には、並進方向と回転方向のうちいずれか一方又は両方が含まれる、
請求項6又は7に記載の制御装置。 - 前記所定方向は、前記第1部位の部分に応じた方向であり、
前記第1部位に加えられた外力に応じて、前記第1部位の部分のうちの当該外力が加わった部分に応じた方向に前記第2部位を前記所定量だけ移動させる、
請求項6から8のうちいずれか一項に記載の制御装置。 - 請求項1から9のうちいずれか一項に記載の制御装置に制御される、
ロボット。 - 請求項1から9のうちいずれか一項に記載の制御装置と、
前記制御装置に制御されるロボットと、
を備えるロボットシステム。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054959A JP6733239B2 (ja) | 2016-03-18 | 2016-03-18 | 制御装置及びロボットシステム |
| US15/458,280 US10350768B2 (en) | 2016-03-18 | 2017-03-14 | Control device, robot, and robot system |
| CN202211704841.1A CN116141290A (zh) | 2016-03-18 | 2017-03-16 | 机器人系统以及机器人的控制方法 |
| CN201710156754.XA CN107414842B (zh) | 2016-03-18 | 2017-03-16 | 控制装置、机器人以及机器人系统 |
| US16/430,513 US11090814B2 (en) | 2016-03-18 | 2019-06-04 | Robot control method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016054959A JP6733239B2 (ja) | 2016-03-18 | 2016-03-18 | 制御装置及びロボットシステム |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2020113964A Division JP2020157475A (ja) | 2020-07-01 | 2020-07-01 | 制御装置、ロボットシステム及びロボット制御方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017164876A true JP2017164876A (ja) | 2017-09-21 |
| JP2017164876A5 JP2017164876A5 (ja) | 2019-04-04 |
| JP6733239B2 JP6733239B2 (ja) | 2020-07-29 |
Family
ID=59847361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016054959A Active JP6733239B2 (ja) | 2016-03-18 | 2016-03-18 | 制御装置及びロボットシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (2) | US10350768B2 (ja) |
| JP (1) | JP6733239B2 (ja) |
| CN (2) | CN107414842B (ja) |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019102745A1 (ja) * | 2017-11-27 | 2019-05-31 | アズビル株式会社 | アクチュエータ動作切替え装置 |
| EP3572894A1 (en) | 2018-05-22 | 2019-11-27 | Seiko Epson Corporation | Control device and robot system |
| JP2019202365A (ja) * | 2018-05-22 | 2019-11-28 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| EP3587049A1 (en) | 2018-06-25 | 2020-01-01 | Seiko Epson Corporation | Control apparatus, robot, and robot system |
| JP2020069552A (ja) * | 2018-10-30 | 2020-05-07 | セイコーエプソン株式会社 | 制御装置およびロボットシステム |
| WO2021199931A1 (ja) * | 2020-04-01 | 2021-10-07 | アズビル株式会社 | 教示装置 |
| JP2022088535A (ja) * | 2018-12-07 | 2022-06-14 | ファナック株式会社 | 操作装置にて手動操作を行うロボットの制御装置およびロボット装置 |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11093590B2 (en) * | 2015-08-31 | 2021-08-17 | Avaya Inc. | Selection of robot operation mode from determined compliance with a security criteria |
| JP6733239B2 (ja) * | 2016-03-18 | 2020-07-29 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| JP6870433B2 (ja) * | 2017-03-31 | 2021-05-12 | セイコーエプソン株式会社 | 制御装置、およびロボットシステム |
| JP2018171668A (ja) | 2017-03-31 | 2018-11-08 | セイコーエプソン株式会社 | 制御装置、ロボット、およびロボットシステム |
| JP6690626B2 (ja) * | 2017-10-31 | 2020-04-28 | 株式会社安川電機 | ロボットシステムおよびロボットの退避方法 |
| JP7131087B2 (ja) | 2018-05-31 | 2022-09-06 | セイコーエプソン株式会社 | ロボットシステムの制御方法およびロボットシステム |
| JP7207010B2 (ja) * | 2019-02-27 | 2023-01-18 | セイコーエプソン株式会社 | ロボットシステム及びその制御方法 |
| JP2021062443A (ja) * | 2019-10-11 | 2021-04-22 | セイコーエプソン株式会社 | 教示方法 |
| JP2021062436A (ja) * | 2019-10-11 | 2021-04-22 | セイコーエプソン株式会社 | 教示方法 |
| JP7415447B2 (ja) * | 2019-10-31 | 2024-01-17 | セイコーエプソン株式会社 | ロボットシステム |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60252911A (ja) * | 1984-05-30 | 1985-12-13 | Hitachi Ltd | 可動部に操作キ−を設けたロボツト |
| JPS63162180A (ja) * | 1986-12-23 | 1988-07-05 | キヤノン株式会社 | ロボツトの教示方法 |
| JPH0440506A (ja) * | 1990-06-06 | 1992-02-10 | Murata Mach Ltd | ロボットの教示装置 |
| JPH05237784A (ja) * | 1992-02-28 | 1993-09-17 | Matsushita Electric Ind Co Ltd | 多関節ロボットの直接教示装置 |
| JPH05285870A (ja) * | 1992-04-03 | 1993-11-02 | Matsushita Electric Ind Co Ltd | 多関節ロボットの直接教示装置 |
| JPH11254361A (ja) * | 1998-03-13 | 1999-09-21 | Sumitomo Heavy Ind Ltd | ロボットにおけるダイレクトティーチングのモード切替え方式 |
| JP2009297853A (ja) * | 2008-06-16 | 2009-12-24 | Denso Wave Inc | ロボットのダイレクトティーチ制御装置 |
| JP2010023184A (ja) * | 2008-07-18 | 2010-02-04 | Fanuc Ltd | 作業座標系の設定方法及び作業座標系の異常検出方法 |
| US20120143371A1 (en) * | 2009-08-14 | 2012-06-07 | Tony Selnes | Industrial Robot And A Method For Adjusting A Robot Program |
| JP2012157946A (ja) * | 2011-02-01 | 2012-08-23 | Fanuc Ltd | 力センサの出力に基づいてロボットのダイレクトティーチをおこなうロボット教示装置 |
| JP2014233814A (ja) * | 2013-06-04 | 2014-12-15 | 株式会社安川電機 | ロボット教示補助装置、ロボットシステムおよびロボット教示方法 |
Family Cites Families (56)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2669075B2 (ja) | 1989-10-06 | 1997-10-27 | 日立建機株式会社 | ロボットの位置と姿勢の直接教示装置及び直接教示方法 |
| JPH0647688A (ja) | 1991-09-30 | 1994-02-22 | Yamaha Corp | ロボットの教示装置 |
| JP3207231B2 (ja) | 1992-01-24 | 2001-09-10 | 松下電器産業株式会社 | ロボットの直接教示方法 |
| JP3274272B2 (ja) * | 1994-03-08 | 2002-04-15 | ファナック株式会社 | 座標系の手動送り方法並びにロボット制御装置 |
| JP3418456B2 (ja) * | 1994-06-23 | 2003-06-23 | ファナック株式会社 | ロボット位置教示具及びロボット位置教示方法 |
| JP3841439B2 (ja) * | 1996-07-24 | 2006-11-01 | ファナック株式会社 | ロボットのジョグ送り方法 |
| JP3948189B2 (ja) * | 2000-03-28 | 2007-07-25 | 松下電器産業株式会社 | ロボットの教示装置 |
| JP2001287899A (ja) | 2000-04-04 | 2001-10-16 | Aichi Corp | ブーム作業機のティーチングプレイバック装置 |
| DE602004019781D1 (de) * | 2003-06-20 | 2009-04-16 | Fanuc Robotics America Inc | Mehrfach-roboterarm-verfolgung und spiegel-jog |
| JP3923053B2 (ja) * | 2004-03-31 | 2007-05-30 | ファナック株式会社 | ロボット教示装置 |
| DE102004041821A1 (de) * | 2004-08-27 | 2006-03-16 | Abb Research Ltd. | Vorrichtung und Verfahren zur Sicherung eines maschinell gesteuerten Handhabungsgerätes |
| DE102004043514A1 (de) * | 2004-09-08 | 2006-03-09 | Sick Ag | Verfahren und Vorrichtung zum Steuern einer sicherheitsrelevanten Funktion einer Maschine |
| JP3927994B2 (ja) * | 2004-10-19 | 2007-06-13 | 松下電器産業株式会社 | ロボット装置 |
| US9789608B2 (en) * | 2006-06-29 | 2017-10-17 | Intuitive Surgical Operations, Inc. | Synthetic representation of a surgical robot |
| WO2007095662A1 (de) * | 2006-02-24 | 2007-08-30 | Ferrobotics Compliant Robot Technology Gmbh | Roboterarm |
| CA2896494A1 (en) * | 2006-06-06 | 2007-12-13 | Schlumberger Canada Limited | Tools and methods useful with wellbore reverse circulation |
| WO2009034477A2 (en) * | 2007-04-16 | 2009-03-19 | The Governors Of The University Of Calgary | Frame mapping and force feedback methods, devices and systems |
| US8702405B2 (en) * | 2007-11-17 | 2014-04-22 | Brian Leonard Verrilli | Twisting translational displacement pump cartridge |
| US8236006B2 (en) * | 2008-01-17 | 2012-08-07 | Life Spine, Inc. | One step entry pedicular preparation device and disc access system |
| KR101537039B1 (ko) * | 2008-11-28 | 2015-07-16 | 삼성전자 주식회사 | 로봇 및 그 제어방법 |
| JP5375062B2 (ja) * | 2008-12-10 | 2013-12-25 | 株式会社安川電機 | ロボットシステムおよび制御方法 |
| JP4730440B2 (ja) * | 2009-01-01 | 2011-07-20 | ソニー株式会社 | 軌道計画装置及び軌道計画方法、並びにコンピューター・プログラム |
| JP4648486B2 (ja) * | 2009-01-26 | 2011-03-09 | ファナック株式会社 | 人間とロボットとの協調動作領域を有する生産システム |
| CN101830000A (zh) * | 2009-03-10 | 2010-09-15 | 巍世科技有限公司 | 自动移动装置的防撞结构 |
| US8426761B2 (en) * | 2009-10-21 | 2013-04-23 | Fanuc Ltd | Method of detection of welding workpiece position using movable electrode |
| JP5218470B2 (ja) * | 2010-04-28 | 2013-06-26 | 株式会社安川電機 | ロボットの作業成否判定装置、および方法 |
| DE102010022931B4 (de) * | 2010-06-07 | 2023-04-20 | Kuka Roboter Gmbh | Robotersteuerung |
| US8855812B2 (en) * | 2010-07-23 | 2014-10-07 | Chetan Kapoor | System and method for robot safety and collision avoidance |
| CN102725109B (zh) * | 2010-07-27 | 2015-03-18 | 松下电器产业株式会社 | 移动路径搜索装置及移动路径搜索方法 |
| EP2600788B1 (en) * | 2010-08-02 | 2023-07-26 | The Johns Hopkins University | Tool exchange interface and control algorithm for cooperative surgical robots |
| JP5840686B2 (ja) * | 2010-08-02 | 2016-01-06 | ザ・ジョンズ・ホプキンス・ユニバーシティ | 繊細な組織の外科的処置を行うための微小力ガイド下協働制御 |
| JP4938118B2 (ja) * | 2010-08-17 | 2012-05-23 | ファナック株式会社 | 人間協調ロボットシステム |
| DE102010064328A1 (de) * | 2010-12-29 | 2012-07-05 | Robert Bosch Gmbh | Sensorsystem zur Umfeldüberwachung an einem mechanischen Bauteil und Verfahren zur Ansteuerung und Auswertung des Sensorsystems |
| JP5750657B2 (ja) * | 2011-03-30 | 2015-07-22 | 株式会社国際電気通信基礎技術研究所 | 強化学習装置、制御装置、および強化学習方法 |
| JP5962020B2 (ja) * | 2012-01-17 | 2016-08-03 | セイコーエプソン株式会社 | ロボット制御装置、ロボットシステム、ロボット及びロボット制御方法 |
| US20130198625A1 (en) * | 2012-01-26 | 2013-08-01 | Thomas G Anderson | System For Generating Haptic Feedback and Receiving User Inputs |
| DE102012102236A1 (de) * | 2012-03-16 | 2013-09-19 | Pilz Gmbh & Co. Kg | Verfahren und Vorrichtung zum Absichern eines gefährlichen Arbeitsbereichs einer automatisiert arbeitenden Maschine |
| JP2015528713A (ja) * | 2012-06-21 | 2015-10-01 | グローバス メディカル インコーポレイティッド | 手術ロボットプラットフォーム |
| US9092698B2 (en) * | 2012-06-21 | 2015-07-28 | Rethink Robotics, Inc. | Vision-guided robots and methods of training them |
| US9694497B2 (en) * | 2012-07-10 | 2017-07-04 | Siemens Aktiengesellschaft | Robot arrangement and method for controlling a robot |
| US9043025B2 (en) * | 2012-08-31 | 2015-05-26 | Rethink Robotics, Inc. | Systems and methods for safe robot operation |
| EP2749974A2 (en) | 2012-12-28 | 2014-07-02 | Kabushiki Kaisha Yaskawa Denki | Robot teaching system, robot teaching assistant device, and robot teaching method |
| JP2014128857A (ja) * | 2012-12-28 | 2014-07-10 | Yaskawa Electric Corp | ロボット教示システムおよびロボット教示方法 |
| WO2014110682A1 (en) * | 2013-01-18 | 2014-07-24 | Robotiq Inc. | Force/torque sensor, apparatus and method for robot teaching and operation |
| US9427871B2 (en) * | 2013-05-06 | 2016-08-30 | Abb Technology Ag | Human safety provision in mobile automation environments |
| JP6117922B2 (ja) * | 2013-06-13 | 2017-04-19 | テルモ株式会社 | 医療用マニピュレータおよびその作動方法 |
| JP6010225B2 (ja) * | 2013-06-13 | 2016-10-19 | テルモ株式会社 | 医療用マニピュレータ |
| DE202013105036U1 (de) * | 2013-11-08 | 2015-02-10 | Daimler Ag | Erfassungseinrichtung |
| JP5893665B2 (ja) * | 2014-04-14 | 2016-03-23 | ファナック株式会社 | 作用された力に応じて移動されるロボットを制御するロボット制御装置 |
| JP5926346B2 (ja) * | 2014-09-25 | 2016-05-25 | ファナック株式会社 | 人間協調ロボットシステム |
| JP5937706B1 (ja) * | 2015-01-21 | 2016-06-22 | ファナック株式会社 | ロボットに加わる外力に基づいてロボットを制御するロボット制御装置、およびロボットシステム |
| JP6034895B2 (ja) * | 2015-02-20 | 2016-11-30 | ファナック株式会社 | 外力に応じてロボットを退避動作させる人間協調ロボットシステム |
| JP6055002B2 (ja) * | 2015-02-20 | 2016-12-27 | ファナック株式会社 | ロボットを退避動作させる人間協調ロボットシステム |
| US10717194B2 (en) * | 2016-02-26 | 2020-07-21 | Intuitive Surgical Operations, Inc. | System and method for collision avoidance using virtual boundaries |
| JP6733239B2 (ja) * | 2016-03-18 | 2020-07-29 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| CN107717982B (zh) * | 2016-08-12 | 2020-09-25 | 财团法人工业技术研究院 | 机械手臂的控制装置及操作方法 |
-
2016
- 2016-03-18 JP JP2016054959A patent/JP6733239B2/ja active Active
-
2017
- 2017-03-14 US US15/458,280 patent/US10350768B2/en active Active
- 2017-03-16 CN CN201710156754.XA patent/CN107414842B/zh active Active
- 2017-03-16 CN CN202211704841.1A patent/CN116141290A/zh active Pending
-
2019
- 2019-06-04 US US16/430,513 patent/US11090814B2/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60252911A (ja) * | 1984-05-30 | 1985-12-13 | Hitachi Ltd | 可動部に操作キ−を設けたロボツト |
| JPS63162180A (ja) * | 1986-12-23 | 1988-07-05 | キヤノン株式会社 | ロボツトの教示方法 |
| JPH0440506A (ja) * | 1990-06-06 | 1992-02-10 | Murata Mach Ltd | ロボットの教示装置 |
| JPH05237784A (ja) * | 1992-02-28 | 1993-09-17 | Matsushita Electric Ind Co Ltd | 多関節ロボットの直接教示装置 |
| JPH05285870A (ja) * | 1992-04-03 | 1993-11-02 | Matsushita Electric Ind Co Ltd | 多関節ロボットの直接教示装置 |
| JPH11254361A (ja) * | 1998-03-13 | 1999-09-21 | Sumitomo Heavy Ind Ltd | ロボットにおけるダイレクトティーチングのモード切替え方式 |
| JP2009297853A (ja) * | 2008-06-16 | 2009-12-24 | Denso Wave Inc | ロボットのダイレクトティーチ制御装置 |
| JP2010023184A (ja) * | 2008-07-18 | 2010-02-04 | Fanuc Ltd | 作業座標系の設定方法及び作業座標系の異常検出方法 |
| US20120143371A1 (en) * | 2009-08-14 | 2012-06-07 | Tony Selnes | Industrial Robot And A Method For Adjusting A Robot Program |
| JP2012157946A (ja) * | 2011-02-01 | 2012-08-23 | Fanuc Ltd | 力センサの出力に基づいてロボットのダイレクトティーチをおこなうロボット教示装置 |
| JP2014233814A (ja) * | 2013-06-04 | 2014-12-15 | 株式会社安川電機 | ロボット教示補助装置、ロボットシステムおよびロボット教示方法 |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019102745A1 (ja) * | 2017-11-27 | 2019-05-31 | アズビル株式会社 | アクチュエータ動作切替え装置 |
| JP2019096234A (ja) * | 2017-11-27 | 2019-06-20 | アズビル株式会社 | アクチュエータ動作切替え装置 |
| JP7042594B2 (ja) | 2017-11-27 | 2022-03-28 | アズビル株式会社 | アクチュエータ動作切替え装置 |
| JP2019202365A (ja) * | 2018-05-22 | 2019-11-28 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| JP2019202364A (ja) * | 2018-05-22 | 2019-11-28 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| EP3572894A1 (en) | 2018-05-22 | 2019-11-27 | Seiko Epson Corporation | Control device and robot system |
| US11318608B2 (en) | 2018-05-22 | 2022-05-03 | Seiko Epson Corporation | Control device and robot system |
| JP7124439B2 (ja) | 2018-05-22 | 2022-08-24 | セイコーエプソン株式会社 | 制御装置及びロボットシステム |
| JP7135437B2 (ja) | 2018-05-22 | 2022-09-13 | セイコーエプソン株式会社 | ロボットシステムの制御方法及びロボットシステム |
| EP3587049A1 (en) | 2018-06-25 | 2020-01-01 | Seiko Epson Corporation | Control apparatus, robot, and robot system |
| JP2020069552A (ja) * | 2018-10-30 | 2020-05-07 | セイコーエプソン株式会社 | 制御装置およびロボットシステム |
| JP7211007B2 (ja) | 2018-10-30 | 2023-01-24 | セイコーエプソン株式会社 | 制御装置、ロボットシステムおよび制御方法 |
| JP2022088535A (ja) * | 2018-12-07 | 2022-06-14 | ファナック株式会社 | 操作装置にて手動操作を行うロボットの制御装置およびロボット装置 |
| JP7351957B2 (ja) | 2018-12-07 | 2023-09-27 | ファナック株式会社 | 操作装置にて手動操作を行うロボットの制御装置およびロボット装置 |
| US11858130B2 (en) | 2018-12-07 | 2024-01-02 | Fanuc Corporation | Controller of robot for performing manual operation by operation device |
| WO2021199931A1 (ja) * | 2020-04-01 | 2021-10-07 | アズビル株式会社 | 教示装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170266815A1 (en) | 2017-09-21 |
| US11090814B2 (en) | 2021-08-17 |
| CN107414842B (zh) | 2023-01-06 |
| JP6733239B2 (ja) | 2020-07-29 |
| CN116141290A (zh) | 2023-05-23 |
| US20190283259A1 (en) | 2019-09-19 |
| US10350768B2 (en) | 2019-07-16 |
| CN107414842A (zh) | 2017-12-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6733239B2 (ja) | 制御装置及びロボットシステム | |
| US10589424B2 (en) | Robot control device, robot, and robot system | |
| US20180029232A1 (en) | Control apparatus and robot | |
| JP2017071018A (ja) | ロボットシステム、ロボット、及びロボット制御装置 | |
| JP2017159426A (ja) | ロボット制御装置、ロボット、及びロボットシステム | |
| JP2017196705A (ja) | ロボット、及びロボットシステム | |
| JP6661925B2 (ja) | 制御装置、ロボットおよびロボットシステム | |
| JP2017170571A (ja) | ロボット、ロボット制御装置、及びロボットシステム | |
| US11701770B2 (en) | Robot system and method of controlling robot system | |
| JP2017124470A (ja) | ロボット、及びロボットシステム | |
| JP2018199172A (ja) | 制御装置、ロボットおよびロボットシステム | |
| JP6326765B2 (ja) | 教示装置、ロボット、ロボットシステム、方法、及びプログラム | |
| JP2018202501A (ja) | ロボット制御装置、ロボット、及びロボットシステム | |
| JP2017019068A (ja) | 教示装置、ロボット、及びロボットシステム | |
| JP2017205819A (ja) | ロボット、制御装置、及びロボットシステム | |
| JP2018089747A (ja) | 制御装置、ロボットおよびロボットシステム | |
| JP2018051647A (ja) | ロボット制御装置、ロボット、及びロボットシステム | |
| JP2015186834A (ja) | ロボット制御装置、把持部制御装置、ロボット、把持部、ロボット制御方法、及びプログラム | |
| JP2016203280A (ja) | ロボット、及び制御装置 | |
| JP6706777B2 (ja) | 制御装置、ロボット、及びロボットシステム | |
| JP2016013589A (ja) | 教示装置、及びロボットシステム | |
| JP6958091B2 (ja) | ロボットシステム、及びロボット制御方法 | |
| JP6322948B2 (ja) | ロボット制御装置、ロボットシステム、ロボット、ロボット制御方法、及びプログラム | |
| JP2020157475A (ja) | 制御装置、ロボットシステム及びロボット制御方法 | |
| JP2017185598A (ja) | ロボット、ロボット制御装置、及びロボットシステム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180907 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190225 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190225 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200128 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200326 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200609 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200622 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6733239 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |