JP2017170571A - ロボット、ロボット制御装置、及びロボットシステム - Google Patents
ロボット、ロボット制御装置、及びロボットシステム Download PDFInfo
- Publication number
- JP2017170571A JP2017170571A JP2016059673A JP2016059673A JP2017170571A JP 2017170571 A JP2017170571 A JP 2017170571A JP 2016059673 A JP2016059673 A JP 2016059673A JP 2016059673 A JP2016059673 A JP 2016059673A JP 2017170571 A JP2017170571 A JP 2017170571A
- Authority
- JP
- Japan
- Prior art keywords
- robot
- information
- conversion information
- coordinate system
- posture
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images





Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B19/00—Programme-control systems
- G05B19/02—Programme-control systems electric
- G05B19/18—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form
- G05B19/408—Numerical control [NC], i.e. automatically operating machines, in particular machine tools, e.g. in a manufacturing environment, so as to execute positioning, movement or co-ordinated operations by means of programme data in numerical form characterised by data handling or data format, e.g. reading, buffering or conversion of data
- G05B19/4086—Coordinate conversions; Other special calculations
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1628—Programme controls characterised by the control loop
- B25J9/1643—Programme controls characterised by the control loop redundant control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/16—Programme controls
- B25J9/1694—Programme controls characterised by use of sensors other than normal servo-feedback from position, speed or acceleration sensors, perception control, multi-sensor controlled systems, sensor fusion
- B25J9/1697—Vision controlled systems
Abstract
Description
この構成により、ロボットは、撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における当該対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、複数の変換情報の中から1つの変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業を行う。これにより、ロボットは、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、変換情報に対応付けられた位置情報が示す位置と、撮像画像から検出された対象物の撮像部座標系における位置とが最も近い変換情報を対象変換情報として選択する。これにより、ロボットは、位置情報が対応付けられた変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、変換情報には更に、撮像部座標系における姿勢を示す姿勢情報が対応付けられており、変換情報に対応付けられた姿勢情報が示す姿勢と、撮像画像から検出された対象物の撮像部座標系における姿勢とが最も近い変換情報を対象変換情報として選択する。これにより、ロボットは、姿勢情報が対応付けられた変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、変換情報に対応付けられた冗長回転角情報が示す冗長回転角と、予め入力された冗長回転角とが最も近い変換情報を対象変換情報として選択する。これにより、ロボットは、冗長回転角情報が対応付けられた変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、変換情報に対応付けられたポーズ情報と、予め入力されたポーズ情報とが一致する変換情報を対象変換情報として選択する。これにより、ロボットは、ポーズ情報が対応付けられた変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、ロボットが作業を行う領域を複数の分割領域に分割し、分割領域に応じた複数の測定点毎に1以上の変換情報を生成する。これにより、ロボットは、分割領域に応じた複数の測定点毎に生成された1以上の変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、測定点毎に、測定点にロボットの制御点を一致させてから変換情報を生成する処理を実行する。これにより、ロボットは、測定点毎に実行された処理であって変換情報を生成する処理によって生成された変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、制御点の第1座標系における位置を保持したまま、制御点の第1座標系における姿勢を変更する毎に変換情報を生成する処理である。これにより、ロボットは、測定点毎に、測定点にロボットの制御点を一致させた状態を保持したまま、制御点の第1座標系における姿勢を変更する毎に変換情報を生成する処理によって生成された変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、制御点の第1座標系における位置を保持したまま、ロボットが備える関節のうちの3つの旋回関節を結ぶことによって形成される三角形を含む平面である対象平面の基準平面に対する角度である冗長回転角を変更する毎に変換情報を生成する処理を実行する。これにより、ロボットは、測定点毎に、測定点にロボットの制御点を一致させた状態を保持したまま、冗長回転角を変更する毎に変換情報を生成する処理によって生成された変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、ロボットが備える各関節のうちの回転角が互いに180°異なる2つの回転角のいずれであっても制御点の位置及び姿勢を第1位置及び第1姿勢と一致させることが可能な関節であるフリップ可能関節の回転角を、互いに180°異なる2つの回転角のうちの小さい方の回転角と大きい方の回転角とのいずれかに変更する毎に変換情報を生成する処理を実行する。これにより、ロボットは、測定点毎に、測定点にロボットの制御点を一致させた状態を保持したまま、フリップ可能関節の回転角を変更する毎に変換情報を生成する処理によって生成された変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、変換情報に対応付けられた撮像位置姿勢情報が示す撮像位置姿勢と、予め入力された撮像位置姿勢とが一致する変換情報を対象変換情報として選択する。これにより、ロボットは、撮像位置姿勢情報が対応付けられた変換情報に基づいて、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットは、撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1行列を、ロボット座標系における当該対象物の位置及び姿勢を表す第2行列に変換する変換行列が複数あり、複数の変換行列の中から1つの変換行列を対象変換行列として選択し、選択した当該変換行列に基づいて所定の作業を行う。これにより、ロボットは、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボット制御装置は、撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、複数の変換情報の中から1つの変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業をロボットに行わせる。これにより、ロボット制御装置は、ロボットが行う作業の精度を向上させることができる。
この構成により、ロボットシステムは、撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、複数の変換情報の中から1つの変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業をロボットに行わせる。これにより、ロボットシステムは、ロボットが行う作業の精度を向上させることができる。
また、ロボット制御装置、及びロボットシステムは、撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、複数の変換情報の中から1つの変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業をロボットに行わせる。これにより、ロボット制御装置、及びロボットシステムは、ロボットが行う作業の精度を向上させることができる。
以下、本発明の実施形態について、図面を参照して説明する。
まず、ロボットシステム1の構成について説明する。
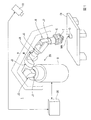
図1は、実施形態に係るロボットシステム1の構成の一例を示す図である。ロボットシステム1は、撮像部10と、ロボット20と、ロボット制御装置30を備える。
エンドエフェクターEは、この一例において、物体を把持可能な指部を備えるエンドエフェクターである。なお、エンドエフェクターEは、当該指部を備えるエンドエフェクターに代えて、空気の吸引や磁力、治具等によって物体を持ち上げることが可能なエンドエフェクターや、他のエンドエフェクターであってもよい。
以下、ロボット20が行う所定の作業について説明する。図1に示した例では、作業台TBの上面に物体Oが載置されている。作業台TBは、例えば、テーブルである。なお、作業台TBは、テーブルに代えて、床面や棚等の物体Oを載置可能な物体であれば如何なる物体であってもよい。
以下、ロボット制御装置30が行う処理の概要について説明する。

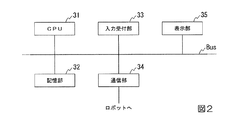
以下、図2を参照し、ロボット制御装置30のハードウェア構成について説明する。図2は、ロボット制御装置30のハードウェア構成の一例を示す図である。
記憶部32は、例えば、HDD(Hard Disk Drive)やSSD(Solid State Drive)、EEPROM(Electrically Erasable Programmable Read−Only Memory)、ROM(Read−Only Memory)、RAM(Random Access Memory)等を含む。なお、記憶部32は、ロボット制御装置30に内蔵されるものに代えて、USB等のデジタル入出力ポート等によって接続された外付け型の記憶装置であってもよい。記憶部32は、ロボット制御装置30が処理する各種情報や画像、動作プログラムを含む各種のプログラム、前述の把持位置姿勢情報、変換行列テーブル等を格納する。変換行列テーブルは、前述の複数の変換行列のそれぞれが格納されたテーブルである。
通信部34は、例えば、USB等のデジタル入出力ポートやイーサネット(登録商標)ポート等を含んで構成される。
表示部35は、例えば、液晶ディスプレイパネル、あるいは、有機EL(ElectroLuminescence)ディスプレイパネルである。
以下、図3を参照し、ロボット制御装置30の機能構成について説明する。図3は、ロボット制御装置30の機能構成の一例を示す図である。
画像取得部362は、撮像部10が撮像した撮像画像を撮像部10から取得する。
算出部363は、画像取得部362が取得した撮像画像から検出部370が検出した物体Oの位置及び姿勢を表す第1行列を算出する。当該位置及び姿勢は、撮像部座標系CCにおける位置及び姿勢である。また、算出部363は、検出部370が検出した制御点Tの位置及び姿勢を表す第1行列を算出する。当該位置及び姿勢は、撮像部座標系CCにおける位置及び姿勢である。また、算出部363は、回転角情報取得部366が取得した回転角情報と、順運動学とに基づいて、制御点Tの位置及び姿勢を算出する。算出部363は、算出した当該位置及び姿勢を表す第2行列を算出する。当該位置及び姿勢は、ロボット座標系RCにおける位置及び姿勢である。
行列変換部365は、変換行列選択部364が選択した対象変換行列に基づいて、算出部363が算出した第1行列を第2行列に変換する。
変換行列生成部367は、算出部363が算出した第1行列及び第2行列に基づいて、変換行列を生成する。当該第1行列は、撮像部座標系CCにおける制御点Tの位置及び姿勢を表す第1行列である。当該第2行列は、ロボット座標系RCにおける制御点Tの位置及び姿勢を表す第2行列である。
ロボット制御部369は、行列変換部365が変換した第2行列が表わす位置及び姿勢に基づいてロボット20を動作させ、ロボット20に所定の作業を行わせる。
検出部370は、画像取得部362が取得した撮像画像から撮像部座標系CCにおける物体Oの位置及び姿勢を検出する。また、検出部370は、画像取得部362が取得した撮像画像から撮像部座標系CCにおける制御点Tの位置及び姿勢を検出する。
以下、図4を参照し、ロボット制御装置30が複数の変換行列の中から所定の条件を満たす変換行列を対象変換行列として選択する処理について説明する。図4は、ロボット制御装置30が複数の変換行列の中から所定の条件を満たす変換行列を対象変換行列として選択する処理の流れの一例を示すフローチャートである。なお、図4に示したフローチャートの処理では、複数の変換行列を格納した変換行列テーブルが予め記憶部32に記憶されている場合について説明する。
2)ステップS130において検出部370が検出した物体Oの姿勢に最も近い姿勢を示す姿勢情報が対応付けられた変換行列であること。当該姿勢は、撮像部座標系CCにおける姿勢である。
3)記憶部32に予め記憶された冗長回転角情報、すなわちユーザーから予め入力された冗長回転角情報が示す冗長回転角に最も近い冗長回転角を示す冗長回転角情報が対応付けられた変換行列であること。
4)記憶部32に予め記憶されたポーズ情報、すなわちユーザーから予め入力されたポーズ情報と一致するポーズ情報が対応付けられた変換行列であること。
このようにして、変換行列選択部364は、ステップS140において、変換行列テーブルに格納された複数の変換行列の中から所定の条件を満たす1つの変換行列を対象変換行列として選択する。
以下、図6及び図7を参照し、ロボット制御装置30が変換行列を生成する処理について説明する。図6は、ロボット制御装置30が変換行列を生成する処理の流れの一例を示すフローチャートである。なお、図6に示したフローチャートの処理では、作業領域RAを示す領域情報が予め記憶部32に記憶されている場合について説明する。また、以下では、作業領域RAが直方体形状の領域である場合について説明する。なお、作業領域RAの形状は、直方体形状に代えて、他の形状であってもよい。
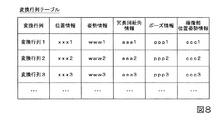
以下、図8を参照し、実施形態の変形例について説明する。
図8は、変換行列テーブルの他の例を示す図である。実施形態において説明した変換行列には、図8に示すように、ロボット座標系RCにおける撮像部10の位置及び姿勢を示す撮像部位置姿勢情報が対応付けられる構成であってもよい。ロボット座標系RCにおける撮像部10の位置は、この一例において、撮像部10の重心の位置によって表される。また、撮像部10のロボット座標系RCにおける姿勢は、撮像部姿勢座標系の各座標軸のロボット座標系RCにおける方向によって表される。撮像部姿勢座標系は、撮像部10の位置に対応付けられた三次元局所座標系である。
上記において説明した実施形態において、撮像部10は、ロボット20と別体としてロボットシステム1に備えられていたが、これに代えて、ロボット20が備える構成であってもよい。この場合、上記の実施形態の変形例において説明したように、変換行列には、撮像部位置姿勢情報が対応付けられる。
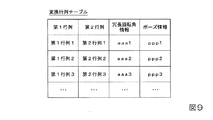
2A)記憶部32に予め記憶された冗長回転角情報、すなわちユーザーから予め入力された冗長回転角情報が示す冗長回転角に最も近い冗長回転角を示す冗長回転角情報が対応付けられた第2行列を含むレコードであること。
3A)記憶部32に予め記憶されたポーズ情報、すなわちユーザーから予め入力されたポーズ情報と一致するポーズ情報が対応付けられた第2行列を含むレコードであること。
また、上記のプログラムは、前述した機能の一部を実現するためのものであってもよい。さらに、上記のプログラムは、前述した機能をコンピューターシステムにすでに記録されているプログラムとの組み合わせで実現できるもの、いわゆる差分ファイル(差分プログラム)であってもよい。
Claims (14)
- 撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における前記対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、前記複数の前記変換情報の中から1つの前記変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業を行う、
ロボット。 - 前記変換情報には、前記撮像部座標系における位置を示す位置情報が対応付けられており、
前記変換情報に対応付けられた前記位置情報が示す位置と、前記撮像画像から検出された前記対象物の前記撮像部座標系における位置とが最も近い前記変換情報を前記対象変換情報として選択する、
請求項1に記載のロボット。 - 前記変換情報には更に、前記撮像部座標系における姿勢を示す姿勢情報が対応付けられており、
前記変換情報に対応付けられた前記姿勢情報が示す姿勢と、前記撮像画像から検出された前記対象物の前記撮像部座標系における姿勢とが最も近い前記変換情報を前記対象変換情報として選択する、
請求項2に記載のロボット。 - 7つ以上の関節を有し、
前記変換情報には更に、前記ロボットが備える関節のうちの3つの旋回関節を結ぶことによって形成される三角形を含む平面である対象平面の基準平面に対する角度である冗長回転角を示す冗長回転角情報が対応付けられており、
前記変換情報に対応付けられた前記冗長回転角情報が示す前記冗長回転角と、予め入力された前記冗長回転角とが最も近い前記変換情報を前記対象変換情報として選択する、
請求項2又は3に記載のロボット。 - 前記変換情報には更に、前記ロボットが備える各関節のうちの回転角が互いに180°異なる2つの回転角のいずれであっても制御点の位置及び姿勢を第1位置及び第1姿勢と一致させることが可能な関節であるフリップ可能関節の回転角を、互いに180°異なる2つの回転角のうちの小さい方の回転角と大きい方の回転角とのいずれにするかを示すポーズ情報が対応付けられており、
前記変換情報に対応付けられた前記ポーズ情報と、予め入力された前記ポーズ情報とが一致する前記変換情報を前記対象変換情報として選択する、
請求項2から4のうちいずれか一項に記載のロボット。 - 前記ロボットが前記作業を行う領域を複数の分割領域に分割し、前記分割領域に応じた複数の測定点毎に1以上の前記変換情報を生成する、
請求項1から5のうちいずれか一項に記載のロボット。 - 前記測定点毎に、前記測定点に前記ロボットの制御点を一致させてから前記変換情報を生成する処理を実行する、
請求項6に記載のロボット。 - 前記処理は、前記ロボットの制御点の前記第1座標系における位置を保持したまま、前記制御点の前記第1座標系における姿勢を変更する毎に前記変換情報を生成する処理である、
請求項7に記載のロボット。 - 7つ以上の関節を有し、
前記処理は、前記制御点の前記第1座標系における位置を保持したまま、前記ロボットが備える関節のうちの3つの旋回関節を結ぶことによって形成される三角形を含む平面である対象平面の基準平面に対する角度である冗長回転角を変更する毎に前記変換情報を生成する処理である、
請求項7又は8に記載のロボット。 - 前記処理は、前記制御点の前記第1座標系における位置を保持したまま、前記ロボットが備える各関節のうちの回転角が互いに180°異なる2つの回転角のいずれであっても制御点の位置及び姿勢を第1位置及び第1姿勢と一致させることが可能な関節であるフリップ可能関節の回転角を、互いに180°異なる2つの回転角のうちの小さい方の回転角と大きい方の回転角とのいずれかに変更する毎に前記変換情報を生成する処理である、
請求項7から9のうちいずれか一項に記載のロボット。 - 前記変換情報には更に、前記撮像部の前記第1座標系における位置及び姿勢である撮像位置姿勢を示す撮像位置姿勢情報が対応付けられており、
前記変換情報に対応付けられた前記撮像位置姿勢情報が示す前記撮像位置姿勢と、予め入力された前記撮像位置姿勢とが一致する前記変換情報を前記対象変換情報として選択する、
請求項2から10のうちいずれか一項に記載のロボット。 - 前記第1情報は、第1行列であり、
前記第2情報は、第2行列であり、
前記変換情報は、変換行列であり、
前記第1座標系は、ロボット座標系である、
請求項1から11のうちいずれか一項に記載のロボット。 - 撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における前記対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、前記複数の前記変換情報の中から1つの前記変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業をロボットに行わせる、
ロボット制御装置。 - 撮像部と、
ロボットと、
前記撮像部により撮像された撮像画像上の位置及び姿勢を表す撮像部座標系における対象物の位置及び姿勢を表す第1情報を、第1座標系における前記対象物の位置及び姿勢を表す第2情報に変換する変換情報が複数あり、前記複数の前記変換情報の中から1つの前記変換情報を対象変換情報として選択し、選択した当該変換情報に基づいて所定の作業を前記ロボットに行わせるロボット制御装置と、
を備えるロボットシステム。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016059673A JP2017170571A (ja) | 2016-03-24 | 2016-03-24 | ロボット、ロボット制御装置、及びロボットシステム |
| US15/464,703 US20170277167A1 (en) | 2016-03-24 | 2017-03-21 | Robot system, robot control device, and robot |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016059673A JP2017170571A (ja) | 2016-03-24 | 2016-03-24 | ロボット、ロボット制御装置、及びロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017170571A true JP2017170571A (ja) | 2017-09-28 |
| JP2017170571A5 JP2017170571A5 (ja) | 2019-04-11 |
Family
ID=59898646
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016059673A Withdrawn JP2017170571A (ja) | 2016-03-24 | 2016-03-24 | ロボット、ロボット制御装置、及びロボットシステム |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20170277167A1 (ja) |
| JP (1) | JP2017170571A (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020075325A (ja) * | 2018-11-08 | 2020-05-21 | 株式会社Ihi | ツールセンターポイントの設定方法及び設定装置 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110472497A (zh) * | 2019-07-08 | 2019-11-19 | 西安工程大学 | 一种融合旋转量的动作特征表示方法 |
| CN113001537B (zh) * | 2019-12-20 | 2022-08-02 | 深圳市优必选科技股份有限公司 | 机械臂控制方法、机械臂控制装置及终端设备 |
| US11530052B1 (en) | 2020-02-17 | 2022-12-20 | Amazon Technologies, Inc. | Systems and methods for automated ground handling of aerial vehicles |
| US11597092B1 (en) | 2020-03-26 | 2023-03-07 | Amazon Technologies, Ine. | End-of-arm tool with a load cell |
| US11534924B1 (en) | 2020-07-21 | 2022-12-27 | Amazon Technologies, Inc. | Systems and methods for generating models for automated handling of vehicles |
| US11534915B1 (en) | 2020-08-05 | 2022-12-27 | Amazon Technologies, Inc. | Determining vehicle integrity based on observed behavior during predetermined manipulations |
| JP2022181762A (ja) * | 2021-05-27 | 2022-12-08 | 株式会社東芝 | 作業支援装置、作業支援方法、および作業支援プログラム |
| CN114425155A (zh) * | 2022-01-26 | 2022-05-03 | 北京市商汤科技开发有限公司 | 数据处理方法和装置、计算机设备及计算机存储介质 |
| CN115793698A (zh) * | 2023-02-07 | 2023-03-14 | 北京四维远见信息技术有限公司 | 自动姿态控制系统和方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06175716A (ja) * | 1992-12-10 | 1994-06-24 | Fanuc Ltd | マニピュレータの物体把持作業における位置・姿勢補正方法 |
| JPH07132474A (ja) * | 1993-11-02 | 1995-05-23 | Fujitsu Ltd | マニピュレータ制御装置 |
| JP2009148850A (ja) * | 2007-12-20 | 2009-07-09 | Denso Wave Inc | ロボットの動作制御装置及びその動作制御方法 |
| JP2009226552A (ja) * | 2008-03-24 | 2009-10-08 | Nissan Motor Co Ltd | 冗長ロボットの教示方法 |
| JP2013526423A (ja) * | 2010-05-14 | 2013-06-24 | コグネックス・テクノロジー・アンド・インベストメント・コーポレーション | マシンビジョンシステムおよびロボットの間のロバストな較正の装置および方法 |
| US20150094855A1 (en) * | 2012-05-04 | 2015-04-02 | Leoni Cia Cable Systems Sas | Imitation learning method for a multi-axis manipulator |
| JP2015199155A (ja) * | 2014-04-07 | 2015-11-12 | キヤノン株式会社 | 情報処理装置および情報処理方法、プログラム |
-
2016
- 2016-03-24 JP JP2016059673A patent/JP2017170571A/ja not_active Withdrawn
-
2017
- 2017-03-21 US US15/464,703 patent/US20170277167A1/en not_active Abandoned
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06175716A (ja) * | 1992-12-10 | 1994-06-24 | Fanuc Ltd | マニピュレータの物体把持作業における位置・姿勢補正方法 |
| JPH07132474A (ja) * | 1993-11-02 | 1995-05-23 | Fujitsu Ltd | マニピュレータ制御装置 |
| JP2009148850A (ja) * | 2007-12-20 | 2009-07-09 | Denso Wave Inc | ロボットの動作制御装置及びその動作制御方法 |
| JP2009226552A (ja) * | 2008-03-24 | 2009-10-08 | Nissan Motor Co Ltd | 冗長ロボットの教示方法 |
| JP2013526423A (ja) * | 2010-05-14 | 2013-06-24 | コグネックス・テクノロジー・アンド・インベストメント・コーポレーション | マシンビジョンシステムおよびロボットの間のロバストな較正の装置および方法 |
| US20150094855A1 (en) * | 2012-05-04 | 2015-04-02 | Leoni Cia Cable Systems Sas | Imitation learning method for a multi-axis manipulator |
| JP2015199155A (ja) * | 2014-04-07 | 2015-11-12 | キヤノン株式会社 | 情報処理装置および情報処理方法、プログラム |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020075325A (ja) * | 2018-11-08 | 2020-05-21 | 株式会社Ihi | ツールセンターポイントの設定方法及び設定装置 |
| JP7172466B2 (ja) | 2018-11-08 | 2022-11-16 | 株式会社Ihi | ツールセンターポイントの設定方法及び設定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170277167A1 (en) | 2017-09-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017170571A (ja) | ロボット、ロボット制御装置、及びロボットシステム | |
| US10589424B2 (en) | Robot control device, robot, and robot system | |
| JP6380828B2 (ja) | ロボット、ロボットシステム、制御装置、及び制御方法 | |
| JP6733239B2 (ja) | 制御装置及びロボットシステム | |
| JP6427972B2 (ja) | ロボット、ロボットシステム及び制御装置 | |
| US20160184996A1 (en) | Robot, robot system, control apparatus, and control method | |
| JP2017071018A (ja) | ロボットシステム、ロボット、及びロボット制御装置 | |
| JP6897396B2 (ja) | 制御装置、ロボットシステムおよび制御方法 | |
| US20180085920A1 (en) | Robot control device, robot, and robot system | |
| JP5223407B2 (ja) | 冗長ロボットの教示方法 | |
| US20180215044A1 (en) | Image processing device, robot control device, and robot | |
| JP6665450B2 (ja) | ロボット、制御装置、及びロボットシステム | |
| JP6455869B2 (ja) | ロボット、ロボットシステム、制御装置、及び制御方法 | |
| JP2015182212A (ja) | ロボットシステム、ロボット、制御装置、及び制御方法 | |
| JP2017202549A (ja) | ロボット制御装置、ロボット、及びロボットシステム | |
| JP2016120530A (ja) | ロボット、及びロボット校正システム | |
| JP7249221B2 (ja) | センサ位置姿勢キャリブレーション装置及びセンサ位置姿勢キャリブレーション方法 | |
| JP2018017610A (ja) | 三次元計測装置、ロボット、ロボット制御装置、及びロボットシステム | |
| JP2022163836A (ja) | ロボット画像の表示方法、コンピュータープログラム、及び、ロボット画像の表示システム | |
| JP2017219359A (ja) | 形状測定装置、ロボット制御装置、及びロボット | |
| JP2019111588A (ja) | ロボットシステム、情報処理装置、及びプログラム | |
| JP2018001321A (ja) | ロボット、ロボット制御装置、及びロボットシステム | |
| JP2016013610A (ja) | ロボット、及び制御方法 | |
| JP7447568B2 (ja) | シミュレーション装置およびプログラム | |
| JP2017100197A (ja) | ロボット、及び制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180906 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181119 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190304 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200205 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200212 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20200413 |