JP6661925B2 - 制御装置、ロボットおよびロボットシステム - Google Patents
制御装置、ロボットおよびロボットシステム Download PDFInfo
- Publication number
- JP6661925B2 JP6661925B2 JP2015175430A JP2015175430A JP6661925B2 JP 6661925 B2 JP6661925 B2 JP 6661925B2 JP 2015175430 A JP2015175430 A JP 2015175430A JP 2015175430 A JP2015175430 A JP 2015175430A JP 6661925 B2 JP6661925 B2 JP 6661925B2
- Authority
- JP
- Japan
- Prior art keywords
- work surface
- robot
- arm
- hand
- control device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/085—Force or torque sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J13/00—Controls for manipulators
- B25J13/08—Controls for manipulators by means of sensing devices, e.g. viewing or touching devices
- B25J13/081—Touching devices, e.g. pressure-sensitive
- B25J13/084—Tactile sensors
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/0081—Program-controlled manipulators with leader teach-in means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Program-controlled manipulators
- B25J9/16—Program controls
- B25J9/1628—Program controls characterised by the control loop
- B25J9/1633—Program controls characterised by the control loop compliant, force, torque control, e.g. combined with position control
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/02—Arm motion controller
- Y10S901/09—Closed loop, sensor feedback controls arm movement
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S901/00—Robots
- Y10S901/46—Sensing device
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Human Computer Interaction (AREA)
- Manipulator (AREA)
Description
特許文献1には、部品の把持等を行うハンドを先端部に取り付けることができるアームを有するロボット本体と、ロボット本体を制御する制御装置とを備えるロボット(ロボットシステム)について開示されている。この特許文献1では、ハンドの代わりにアームの先端部にティーチングペンダントを接続し、ティーチングペンダントを用いてロボットに対して作業面のティーチングを行っている。
前記エンドエフェクターの第1部分を作業面に接近させて、前記力検出器からの出力に基づいて前記第1部分と前記作業面との接触を検出した後、前記第1部分とは異なる前記エンドエフェクターの第2部分を前記作業面に接近させて、前記力検出器からの出力に基づいて前記第2部分と前記作業面との接触を検出し、前記作業面に対する前記エンドエフェクターの位置を前記ロボットに教示させることを特徴とする。
これにより、作業面の座標系をより高精度に求めることができる。
これにより、作業面の座標系をより高精度に求めることができる。
これにより、作業面の状態をより正確に把握することができる。
これにより、作業面に対するエンドエフェクターの位置および姿勢を高精度に教示することができる制御装置により制御されるロボットを提供することができる。
前記制御装置により制御されるロボットと、を備えることを特徴とする。
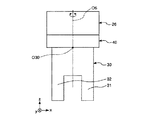
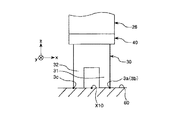
図1は、本発明のロボットシステムの好適な実施形態を示す図である。図2は、図1に示すロボットシステムのブロック図である。図3は、図1に示すロボットの概略図である。図4は、図1に示すロボットが有するハンドの概略図である。図5は、図1に示すロボットに教示する作業面を示す図である。図6は、図1に示すロボットに対する作業面の教示について説明するためのフローチャートである。図7は、図6に示す教示点の算出を説明するためのフローチャートである。図8は、ハンドの第1部分と作業面とが接触した状態を示す図である。図9および図10は、それぞれ、ハンドの第2部分と作業面とが接触した状態を示す図である。図11は、ハンドの第3部分と作業面とが接触した状態を示す図である。
図1に示すロボット1は、精密機器やこれを構成する部品(対象物)の給材、除材、搬送および組立等の作業を行うことができる。
図1に示す制御装置5は、ロボット1の各部を制御する。この制御装置5は、例えば、CPU(Central Processing Unit)やROM(read only memory)およびRAM(Random Access Memory)が内蔵されたパーソナルコンピューター(PC)等で構成することができる。
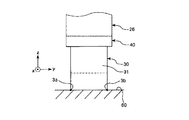
接触判断部53は、情報取得部52で取得した検出結果(並進力成分Fx、Fy、Fzおよび回転力成分Mx、My、Mz)と、後述する記憶部55に記憶されている情報(ハンド30と作業面60とが接触したときに力検出器40から出力される検出結果)とを基に、ハンド30が作業面60(図5参照)に接触したか否かを判断する。
以上、ロボットシステム100の基本的な構成について簡単に説明した。
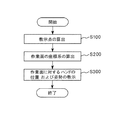
まず、教示点の算出(ステップS100)を行う。
図7に示すフローを参照しつつ、教示点の算出(ステップS100)について説明する。この教示点の算出(ステップS100)では、作業面60上の互いに離れた任意の3つの箇所A、B、C(3つの測定点)におけるハンド30の教示点を算出する。
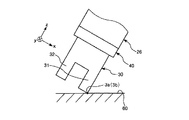
図7に示すように、駆動制御部51の指令によりロボットアーム20を駆動して、ハンド30の箇所A(目的箇所)への接近(移動)を開始する(ステップS1)。ここで、ハンド30を箇所Aへ接近させる際、作業面60に対してハンド30を傾けた状態で接近させる。
(ステップS7)。
次に、図6に示すように、作業面の座標系の算出(ステップS200)を行う。
次に、図6に示すように、作業面に対するハンドの位置の教示(ステップS300)に行う。
以上、ロボット1の教示について説明した。
Claims (10)
- アームと、前記アームに設けられたエンドエフェクターと、前記アームに設けられていて力を検出する力検出器と、を有するロボットを制御する制御装置であって、
前記エンドエフェクターの第1部分を作業面に接近させて、前記力検出器からの出力に基づいて前記第1部分と前記作業面との接触を検出した後、前記第1部分とは異なる前記エンドエフェクターの第2部分を前記作業面に接近させて、前記力検出器からの出力に基づいて前記第2部分と前記作業面との接触を検出し、前記作業面に対する前記エンドエフェクターの位置を前記ロボットに教示させ、
前記第2部分を前記作業面に接触させた後、前記第1部分および前記第2部分とは異なる前記エンドエフェクターの第3部分を前記作業面に接近させて、前記力検出器からの出力に基づいて前記第3部分と前記作業面との接触を検出することを特徴とする制御装置。 - 前記第2部分の前記作業面への接近は、前記第1部分を前記作業面に接触させた状態で、前記第1部分を支点として前記エンドエフェクターの姿勢を変化させる動作を含む請求項1に記載の制御装置。
- 前記第1部分が前記作業面に接触したときの前記力検出器の出力と、前記第2部分が前記作業面に接触したときの前記力検出器の出力とから、教示点を求める請求項1または2に記載の制御装置。
- 前記第1部分が前記作業面に接触したときの前記力検出器の出力と、前記第2部分が前記作業面に接触したときの前記力検出器の出力とから、前記エンドエフェクターの姿勢を求める請求項1ないし3のいずれか1項に記載の制御装置。
- 前記作業面上の少なくとも3つの箇所において、前記作業面に対する前記エンドエフェクターの位置を検出する請求項1ないし4のいずれか1項に記載の制御装置。
- 前記少なくとも3つの箇所における教示点をそれぞれ求め、少なくとも3つの前記教示点から、前記作業面の座標系を求める請求項5に記載の制御装置。
- 前記少なくとも3つの箇所における前記エンドエフェクターの姿勢をそれぞれ求め、少なくとも3つの前記エンドエフェクターの姿勢から、前記作業面が平面であるか否かを判断する請求項5または6に記載の制御装置。
- 前記ロボットが有する前記アームは、第1回動軸周りに回動可能な第1アームと、前記第1アームに設けられていて前記第1回動軸の軸方向とは異なる軸方向である第2回動軸周りに回動可動な第2アームと、を有する請求項1ないし7のいずれか1項に記載の制御装置。
- 請求項1ないし8のいずれか1項に記載の制御装置により制御されることを特徴とするロボット。
- 請求項1ないし8のいずれか1項に記載の制御装置と、
前記制御装置により制御されるロボットと、を備えることを特徴とするロボットシステム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015175430A JP6661925B2 (ja) | 2015-09-07 | 2015-09-07 | 制御装置、ロボットおよびロボットシステム |
| US15/256,979 US10195744B2 (en) | 2015-09-07 | 2016-09-06 | Control device, robot, and robot system |
| CN201610808829.3A CN106493711B (zh) | 2015-09-07 | 2016-09-07 | 控制装置、机器人以及机器人系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015175430A JP6661925B2 (ja) | 2015-09-07 | 2015-09-07 | 制御装置、ロボットおよびロボットシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017052015A JP2017052015A (ja) | 2017-03-16 |
| JP6661925B2 true JP6661925B2 (ja) | 2020-03-11 |
Family
ID=58190031
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015175430A Active JP6661925B2 (ja) | 2015-09-07 | 2015-09-07 | 制御装置、ロボットおよびロボットシステム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10195744B2 (ja) |
| JP (1) | JP6661925B2 (ja) |
| CN (1) | CN106493711B (ja) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6710946B2 (ja) * | 2015-12-01 | 2020-06-17 | セイコーエプソン株式会社 | 制御装置、ロボットおよびロボットシステム |
| CN108858182B (zh) * | 2017-05-08 | 2023-01-10 | 精工爱普生株式会社 | 机器人的控制装置及控制方法以及机器人系统 |
| JP2019027920A (ja) * | 2017-07-31 | 2019-02-21 | セイコーエプソン株式会社 | 力検出装置およびロボット |
| CN107584493B (zh) * | 2017-08-29 | 2020-08-14 | 成都乐创自动化技术股份有限公司 | 一种捕捉目标示教点的方法及系统 |
| JP2019051578A (ja) * | 2017-09-19 | 2019-04-04 | セイコーエプソン株式会社 | ロボット、ロボットシステム、及びロボット制御装置 |
| JP7052308B2 (ja) * | 2017-11-15 | 2022-04-12 | セイコーエプソン株式会社 | センサー、およびロボット |
| JP2021062436A (ja) * | 2019-10-11 | 2021-04-22 | セイコーエプソン株式会社 | 教示方法 |
| JP2021062443A (ja) * | 2019-10-11 | 2021-04-22 | セイコーエプソン株式会社 | 教示方法 |
| JP7620391B2 (ja) * | 2020-03-18 | 2025-01-23 | 株式会社東芝 | 制御装置、検査システム、制御方法、プログラム、及び記憶媒体 |
| JP7619070B2 (ja) * | 2021-02-10 | 2025-01-22 | セイコーエプソン株式会社 | 教示装置、教示方法および教示プログラム |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2787891B2 (ja) * | 1993-09-08 | 1998-08-20 | 三菱電機株式会社 | レーザロボットの自動教示装置 |
| JP3671694B2 (ja) | 1998-09-18 | 2005-07-13 | 株式会社デンソー | ロボットのティーチング方法およびその装置 |
| JP4264778B2 (ja) * | 1999-07-26 | 2009-05-20 | 東芝機械株式会社 | 作業用ロボットおよび教示点位置・姿勢データ測定方法 |
| JP2001038660A (ja) * | 1999-07-26 | 2001-02-13 | Toshiba Mach Co Ltd | 教示用エンドエフェクタと、ロボットの教示方法 |
| CN101870108B (zh) * | 2006-01-13 | 2011-09-28 | 松下电器产业株式会社 | 机械手臂的控制装置 |
| US8260463B2 (en) * | 2006-02-02 | 2012-09-04 | Kabushiki Kaisha Yaskawa Denki | Robot system |
| JP2010023184A (ja) * | 2008-07-18 | 2010-02-04 | Fanuc Ltd | 作業座標系の設定方法及び作業座標系の異常検出方法 |
| JP4598849B2 (ja) * | 2008-09-03 | 2010-12-15 | ファナック株式会社 | 嵌合の詰まり状態を修正する嵌合装置 |
| JP4568795B2 (ja) * | 2009-01-09 | 2010-10-27 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアームの制御プログラム、並びに、集積電子回路 |
| JP5459486B2 (ja) * | 2010-01-26 | 2014-04-02 | 株式会社Ihi | ロボットのキャリブレーション方法および装置 |
| JP5165160B2 (ja) * | 2011-01-27 | 2013-03-21 | パナソニック株式会社 | ロボットアームの制御装置及び制御方法、ロボット、ロボットアーム制御プログラム、並びに、集積電子回路 |
| JP5915214B2 (ja) * | 2012-02-01 | 2016-05-11 | セイコーエプソン株式会社 | ロボット装置、組立て方法、及び組立てプログラム |
| JP5695223B2 (ja) * | 2012-05-23 | 2015-04-01 | パナソニックIpマネジメント株式会社 | ロボット、ロボットの制御装置、制御方法、及び制御プログラム |
| GB2525355B (en) * | 2013-02-20 | 2020-01-01 | Ihi Corp | Force control robot and method for controlling same |
| JP2014176940A (ja) * | 2013-03-15 | 2014-09-25 | Yaskawa Electric Corp | ロボットシステム、ロボット制御方法及び被加工物の製造方法 |
| JP6468741B2 (ja) * | 2013-07-22 | 2019-02-13 | キヤノン株式会社 | ロボットシステム及びロボットシステムの校正方法 |
| CN104608128A (zh) * | 2013-11-01 | 2015-05-13 | 精工爱普生株式会社 | 机器人、控制装置、机器人系统、以及机器人控制方法 |
| JP2015226968A (ja) * | 2014-06-02 | 2015-12-17 | セイコーエプソン株式会社 | ロボット、ロボットシステム、制御装置、及び制御方法 |
| CN105313127A (zh) * | 2014-06-02 | 2016-02-10 | 精工爱普生株式会社 | 机器人、机器人的控制方法以及机器人的控制装置 |
-
2015
- 2015-09-07 JP JP2015175430A patent/JP6661925B2/ja active Active
-
2016
- 2016-09-06 US US15/256,979 patent/US10195744B2/en active Active
- 2016-09-07 CN CN201610808829.3A patent/CN106493711B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20170066137A1 (en) | 2017-03-09 |
| CN106493711B (zh) | 2021-04-16 |
| US10195744B2 (en) | 2019-02-05 |
| JP2017052015A (ja) | 2017-03-16 |
| CN106493711A (zh) | 2017-03-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6661925B2 (ja) | 制御装置、ロボットおよびロボットシステム | |
| JP6733239B2 (ja) | 制御装置及びロボットシステム | |
| JP6511715B2 (ja) | ロボット制御装置、ロボットシステム、及びロボット | |
| US10434646B2 (en) | Robot control apparatus, robot, and robot system | |
| JP6746990B2 (ja) | ロボット制御装置及びロボットシステム | |
| JP6663978B2 (ja) | ツールオフセットを決定するシステムおよび方法 | |
| US10960542B2 (en) | Control device and robot system | |
| JP2015182142A (ja) | ロボット、ロボットシステム及び教示方法 | |
| JP2018118365A (ja) | 制御装置およびロボットシステム | |
| US10537988B2 (en) | Controller, robot and robot system | |
| JP7187765B2 (ja) | ロボット制御装置 | |
| CN108068110A (zh) | 控制装置、机器人及机器人系统 | |
| JP2017205819A (ja) | ロボット、制御装置、及びロボットシステム | |
| JP2014155994A (ja) | ロボットおよびロボット制御装置 | |
| JPWO2017175340A1 (ja) | 最適化装置及びそれを備えた垂直型多関節ロボット | |
| JP2015085499A (ja) | ロボット、ロボットシステム、制御装置及び制御方法 | |
| JP2019063879A (ja) | シミュレーション装置、ロボット制御装置およびロボット | |
| JP2020157475A (ja) | 制御装置、ロボットシステム及びロボット制御方法 | |
| JP2015089578A (ja) | ロボットシステム | |
| CN112643683B (zh) | 示教方法 | |
| WO2025028401A1 (ja) | ロボットシステム | |
| JP2020040185A (ja) | ロボットアーム、ロボットアームを用いたロボット装置、ロボットアームの制御方法、制御プログラム及び記録媒体 | |
| JP2019141976A (ja) | 制御装置、ロボットの制御方法およびロボットシステム | |
| KR20170133143A (ko) | 로봇 팔 제어 장치 및 방법 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180725 |
|
| RD05 | Notification of revocation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7425 Effective date: 20180905 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20181115 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190726 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190806 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190930 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200114 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200127 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6661925 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |