JP2014155994A - ロボットおよびロボット制御装置 - Google Patents
ロボットおよびロボット制御装置 Download PDFInfo
- Publication number
- JP2014155994A JP2014155994A JP2013028664A JP2013028664A JP2014155994A JP 2014155994 A JP2014155994 A JP 2014155994A JP 2013028664 A JP2013028664 A JP 2013028664A JP 2013028664 A JP2013028664 A JP 2013028664A JP 2014155994 A JP2014155994 A JP 2014155994A
- Authority
- JP
- Japan
- Prior art keywords
- angle
- robot
- gripping
- force sensor
- scanning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Abstract
【解決手段】本発明のロボットは、アーム連結体と、挿入対象物の挿入箇所に挿入する挿入部を有する把持物を把持し、前記把持物を把持する方向に対して垂直な把持軸を有するハンドと、前記ハンドが把持した前記把持物を介して受ける反力を検出する力覚センサーとを有するロボット本体と、前記ロボット本体の作動を制御するロボット制御装置とを備える。前記ロボット制御装置は、第1の走査を、前記挿入部の押し当て方向と前記把持軸とのなす角度θを変更して行い、前記力覚センサーの検出結果に基づいて前記角度θを設定する角度設定部と、第2の走査を行い、前記力覚センサーの検出結果に基づいて前記挿入箇所の位置を特定する位置特定部と、前記挿入部を前記挿入箇所に挿入する挿入動作制御部とを備える。
【選択図】図1
Description
また、特許文献1に記載のロボットでは、把持物の傾斜角として、常に、予め制御装置内に記憶されている値を用いる。特許文献1に記載の把持物の形状は円柱状であるが、把持物の形状は円柱状だけではなく、円錐台状、円錐状等もあり、常に、予め設定されている傾斜角で把持物を傾斜させると、逆に、挿入対象物に対する把持物の接触面積が大きくなり、穴を探索し難くなる場合がある。すなわち、挿入対象物に対する把持物の接触部位の角度は鋭角のほうが好ましいが、円柱状の把持物に好ましい傾斜角を同様に円錐台の把持物に適用すると、鋭角とならないことがある。
本発明の目的は、確実に把持物の挿入部を挿入対象物の挿入箇所に挿入することができるロボットおよびロボット制御装置を提供することにある。
(適用例1)
本発明に係わるロボットは、複数のアームを回動可能に連結してなるアーム連結体と、前記アーム連結体に連結される力覚センサーと、前記力覚センサーに装着されて把持物を把持するハンドと、を含むロボット本体と、前記ロボット本体の作動を制御するロボット制御装置と、を備え、前記ロボット制御装置は、前記ハンドが把持した前記把持物の挿入部を押し当て面に押し当てつつ前記把持物を前記押し当て面に沿って移動させる第1の走査を、前記挿入部の押し当て方向と、前記把持物を把持する方向に対して垂直な把持軸と、のなす角度θを変更して行い、前記第1の走査の際、前記力覚センサーにより反力の検出を行い、前記力覚センサーの検出結果に基づいて前記角度θを設定する角度設定部と、前記挿入部の押し当て方向と前記把持軸とのなす角度θを前記角度設定部により設定された値に設定した状態で、前記ハンドが把持した前記把持物の前記挿入部を挿入対象物に押し当てつつ前記把持物を前記挿入対象物に沿って移動させる第2の走査を行い、前記第2の走査の際、前記力覚センサーにより反力の検出を行い、前記力覚センサーの検出結果に基づいて前記挿入箇所の位置を特定する位置特定部と、前記把持物の前記挿入部を前記挿入箇所に挿入する挿入動作制御部と、を備えることを特徴とする。
さらに、種々の形状の把持物に対して、適正な角度θを設定することができ、これにより、連続して形状が異なる把持物を把持しても、挿入箇所の位置を常に安定して検出することができる。
本発明に係わるロボットでは、前記角度設定部は、前記力覚センサーの検出結果に基づいて、前記挿入部と前記押し当て面との間の摩察力を求め、前記摩擦力に基づいて前記角度θを設定するよう構成されていることが好ましい。
種々の形状の把持物に対して、適正な角度θを設定することができ、これにより、連続して形状が異なる把持物を把持しても、挿入箇所の位置を常に安定して検出することができる。
本発明に係わるロボットでは、前記角度設定部は、前記第1の走査中に、前記角度θを徐々に増加または徐々に減少させるよう構成されていることが好ましい。
走査中に、角度θを徐々に増加または徐々に減少させることにより、予め一定の角度を設定してそれぞれ複数回走査するよりも短時間で最適な角度θを決定することができる。
本発明に係わるロボットでは、前記角度設定部は、前記力覚センサーの検出結果に基づいて、前記挿入部と前記押し当て面との間の摩察力を求め、前記摩擦力が一定のときの前記角度θの値に前記角度θを設定するか、または前記摩擦力が徐々に増加または徐々に減少するときの前記角度θの値の範囲内に前記角度θを設定するよう構成されていることが好ましい。
摩擦力が一定または徐々に増加または徐々に減少するときに角度θを設定すれば、把持物と挿入対象物との接触面積を小さくすることができる。
本発明に係わるロボットでは、前記角度設定部は、前記角度θを変更して前記第1の走査を複数回行い、前記各回の前記第1の走査中は、それぞれ、前記角度θを一定にするよう構成されていることが好ましい。
複数回の走査によって、検出値のノイズまたは異常値を除外することができる。
本発明に係わるロボットでは、前記位置特定部は、前記力覚センサーの検出結果に基づいて、前記挿入部を前記挿入対象物に押し当てたときの前記挿入対象物からの反力を求め、前記挿入対象物からの反力に基づいて前記挿入箇所の位置を特定するよう構成されていることが好ましい。
挿入部の形状および大きさ等に影響されにくい位置特定ができ、これにより、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボットでは、前記位置特定部は、前記挿入対象物からの反力が減少したときの位置を前記挿入箇所の位置と認定するよう構成されていることが好ましい。
例えば挿入箇所が穴等の場合では、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボットでは、前記位置特定部は、前記挿入対象物からの反力が閾値よりも小さいときの位置を前記挿入箇所の位置と認定するよう構成されていることが好ましい。
閾値との比較によって、位置の認定を安定して行うことができる。これにより、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボットでは、前記位置特定部は、前記第2の走査の位置を変更して前記第2の走査を複数回行って、前記挿入箇所の位置を特定するよう構成されていることが好ましい。
複数回の走査によって得られた情報を二次元的解析を行うことにより、一層精度の高い位置の特定ができる。これにより、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボットでは、前記位置特定部は、前記第2の走査の位置を変更して前記第2の走査を複数回行って、前記挿入対象物からの反力が最小のときの位置を前記挿入箇所の位置と認定するよう構成されていることが好ましい。
複数回の走査によって得られた情報を二次元的解析を行うことにより、一層精度の高い位置の特定ができ、例えば挿入箇所が穴等の場合では、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボットでは、前記押し当て面は、前記挿入対象物または前記ロボット本体の稼働範囲に設置された構造物に設けられたものであることが好ましい。
これにより、より容易かつ確実に、角度θを設定することができる。
(適用例12)
本発明に係わるロボットでは、前記位置特定部が特定する前記挿入箇所の位置は、前記挿入対象物の表面に形成された開口の中心であることが好ましい。
これにより、より確実に、把持物の挿入部を挿入箇所に挿入することができる。
本発明に係わるロボットでは、前記ロボット制御装置は、前記第2の走査を行う走査領域を前記第2の走査の前に設定する走査領域設定部を有することが好ましい。
これにより、より容易に、角度θを設定することができる。
(適用例14)
本発明に係わるロボットでは、前記ハンドと、前記把持物と、前記挿入対象物とを含む領域を撮像し、撮像データを得る撮像装置を有し、
前記走査領域設定部は、前記画像データに基づいて前記走査領域を設定するよう構成されていることが好ましい。
これにより、より容易に、角度θを設定することができる。
本発明に係わるロボットでは、前記角度θを変更する際は、前記把持物が軸回りに回動して傾倒し、
角度設定部は、前記第1の走査において、前記把持物を前記軸方向に移動させるよう構成されていることが好ましい。
これにより、第2の走査において把持物を前記軸方向に移動させる場合、第1の走査における把持物の移動方向が前記第2の走査のときと同一となり、これによって、適正な角度θを設定することができる。
本発明に係わるロボットでは、前記角度θを変更する際は、前記把持物が軸回りに回動して傾倒し、
位置特定部は、前記第2の走査において、前記把持物を前記軸方向に移動させるよう構成されていることが好ましい。
これにより、より容易かつ確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボット制御装置は、複数のアームを回動可能に連結してなるアーム連結体と、前記アーム連結体に連結される力覚センサーと、前記力覚センサーに装着されて把持物を把持するハンドと、を含むロボット本体の作動を制御するロボット制御装置であって、前記ハンドが把持した前記把持物の挿入部を押し当て面に押し当てつつ前記把持物を前記押し当て面に沿って移動させる第1の走査を、前記挿入部の押し当て方向と、前記把持物を把持する方向に対して垂直な把持軸と、のなす角度θを変更して行い、前記第1の走査の際、前記力覚センサーにより、前記挿入部と前記押し当て面との間の摩察力を検出し、前記力覚センサーの検出結果に基づいて前記角度θを設定する角度設定部と、前記角度θを前記角度設定部により設定された値に設定した状態で、前記ハンドが把持した前記把持物の前記挿入部を挿入対象物に押し当てつつ前記把持物を前記挿入対象物に沿って移動させる第2の走査を行い、前記第2の走査の際、前記力覚センサーにより、前記挿入部を前記挿入対象物に押し当てたときの反力を検出し、前記力覚センサーの検出結果に基づいて前記挿入箇所の位置を特定する位置特定部と、前記把持物の前記挿入部を前記挿入箇所に挿入する挿入動作制御部と、を備えることを特徴とする。
また、種々の形状の把持物に対して、適正な角度θを設定することができ、これにより、確実に、把持物の挿入部を挿入箇所に挿入することができる。
本発明に係わるロボット制御装置は、前記角度設定部は、前記力覚センサーの検出結果に基づいて、前記挿入部と前記押し当て面との間の摩察力を求め、前記摩擦力に基づいて前記角度θを設定するよう構成されていることが好ましい。
これにより、より確実に、角度θを設定することができる。
本発明に係わるロボット制御装置は、前記位置特定部は、前記力覚センサーの検出結果に基づいて、前記挿入部を前記挿入対象物に押し当てたときの前記挿入対象物からの反力を求め、前記挿入対象物からの反力に基づいて前記挿入箇所の位置を特定するよう構成されていることが好ましい。
これにより、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボット制御装置は、前記位置特定部は、前記挿入対象物からの反力が減少したときの位置を前記挿入箇所の位置と認定するよう構成されていることが好ましい。
これにより、より確実に、挿入箇所の位置を特定することができる。
本発明に係わるロボットは、複数のアームが回動可能に連結してなるアーム連結体と、前記アーム連結体に連結される力覚センサーと、前記力覚センサーに装着されて把持物を把持するハンドと、を含み、前記把持物を押し当て面へ押し当てる傾斜角度を変えながら移動させ、前記力覚センサーによる摩擦力の検出によって、前記把持物の押し当てられる部分が鋭角となる押し当て角度を探索し、前記傾斜角度を前記押し当て角度に設定して、前記把持物の挿入部を挿入する挿入対象物の挿入箇所の位置を探索し、前記挿入部を前記挿入箇所に挿入することを特徴とする。
さらに、種々の形状の把持物に対して、適正な押し当て角度を設定することができ、これにより、連続して形状が異なる把持物を把持しても、挿入箇所の位置を常に安定して検出することができる。
<第1実施形態>
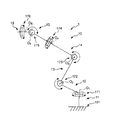
図1は、本発明のロボットの第1実施形態を正面側から見た斜視図である。図2は、図1に示すロボットを背面側から見た斜視図である。図3は、図1に示すロボットの概略図である。図4は、図1に示すロボットの主要部のブロック図である。図5は、図1に示すロボットのロボット制御装置の主要部のブロック図である。図6は、図1に示すロボットのハンドを示す側面図である。図7〜図10は、それぞれ、図1に示すロボットの動作を説明するための図である。
図1〜図3に示すロボット(産業用ロボット)1は、例えば腕時計のような精密機器等を製造する製造工程で用いることができ、ロボット本体10と、ロボット本体10の作動を制御するロボットロボット制御装置20(図4、図5参照)と、撮像装置として第1電子カメラ71および第2電子カメラ72とを有している。ロボット本体10と、ロボット制御装置20と、第1電子カメラ71および第2電子カメラ72とは、それぞれ、電気的に接続されている。また、ロボット制御装置20は、例えば、CPU(Central Processing Unit)が内蔵されたパーソナルコンピューター(PC)等で構成することができる。なお、ロボット制御装置20については、後で詳述する。
ロボット本体10は、ロボット制御装置20と電気的に接続されている。すなわち、駆動源401〜406、角度センサー411〜416は、それぞれ、ロボット制御装置20と電気的に接続されている。
アーム12〜15は、それぞれ、中空のアーム本体2と、駆動機構3と、封止手段4とを有している。なお、以下では、説明の都合上、第1アーム12が有するアーム本体2、駆動機構3、封止手段4をそれぞれ「アーム本体2a」、「駆動機構3a」、「封止手段4a」と言い、第2アーム13が有するアーム本体2、駆動機構3、封止手段4をそれぞれ「アーム本体2b」、「駆動機構3b」、「封止手段4b」と言い、第3アーム14が有するアーム本体2、駆動機構3、封止手段4をそれぞれ「アーム本体2c」、「駆動機構3c」、「封止手段4c」と言い、第4アーム15が有するアーム本体2、駆動機構3、封止手段4をそれぞれ「アーム本体2d」、「駆動機構3d」、「封止手段4d」と言うことがある。
第2アーム13は、第1アーム12の先端部に連結されている。この第2アーム13では、駆動機構3bがモーター403Mを有しており、アーム本体2b内に収納している。また、アーム本体2a内は、封止手段4bにより気密封止されている。
第4アーム15は、第3アーム14の先端部に、その中心軸方向と平行に連結されている。このアーム15では、駆動機構3dがモーター405M、406Mを有しており、アーム本体2d内に収納している。また、アーム本体2d内は、封止手段4dにより気密封止されている。
また、挿入対象物51に形成された穴52には、貫通穴と、貫通していない穴、すなわち、有底の穴(凹部)とが含まれるが、本実施形態では、代表的に、有底の穴を図示して説明を行う。また、把持物41は、その穴52に挿入部412のみが挿入されてもよく、また、把持物41全体が挿入されてもよい。また、穴が貫通穴の場合は、把持物41は、その貫通穴を通過してしまってもよい。また、挿入対象物51に設けられた挿入箇所は、穴に限定されるものでもない。
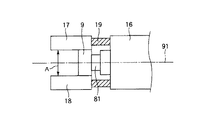
リスト本体161の先端面163は、平坦な面となっており、その先端面163および後述するカバー部材19(図6参照)は、ハンド9等が装着される装着部となる。また、リスト本体161は、関節176を介して、第4アーム15の駆動機構3dに連結されており、当該駆動機構3dのモーター406Mの駆動により、回転軸O6回りに回動する。
また、図6に示すように、ロボット1のロボット本体10は、リスト16の先端部に設けられた力覚センサー81を有している。なお、力覚センサー81は、前記の位置に限らず、例えば、ハンド9の基端部等に設けられていてもよい。
この力覚センサー81の検出結果、すなわち、力覚センサー81から出力される信号は、ロボット制御装置20に入力され、ロボット制御装置20は、力覚センサー81の検出結果に基づいて所定の制御を行う。
また、リスト16の先端部には、円筒状をなすカバー部材19が形成されている。リスト16の先端部にハンド9が装着されると、カバー部材19と、リスト16と、ハンド9とで、収納空間が形成される。この収納空間には、力覚センサー81が収納されている。
次に、図1、図2、図4、図5を参照し、ロボット制御装置20の構成について説明する。
図1、図2、図4に示すように、ロボット制御装置20は、第1駆動源401の作動を制御する第1駆動源制御部201と、第2駆動源402の作動を制御する第2駆動源制御部202と、第3駆動源403の作動を制御する第3駆動源制御部203と、第4駆動源404の作動を制御する第4駆動源制御部204と、第5駆動源405の作動を制御する第5駆動源制御部205と、第6駆動源406の作動を制御する第6駆動源制御部206とを有している。
第2減算器には、角速度指令ωcが入力され、また、角速度フィードバック値ωfbが入力される。第2減算器は、これら角速度指令ωcと角速度フィードバック値ωfbとの偏差(第1駆動源401の角速度の目標値から角速度フィードバック値ωfbを減算した値)を出力する。
このようにして、第1駆動源401の角加速度、すなわち、トルクがその目標値と可及的に等しくなり、かつ、位置フィードバック値Pfbが位置指令Pcと可及的に等しくなるとともに、角速度フィードバック値ωfbが角速度指令ωcと可及的に等しくなるように、フィードバック制御がなされ、第1駆動源401の駆動電流が制御される。
また、図5に示すように、ロボット制御装置20は、角度設定部21と、位置特定部22と、挿入動作制御部23とを有している。ロボット制御装置20は、第1電子カメラ71、第2電子カメラ72により撮像して得られた画像データ、力覚センサー81の検出結果等に基づいて、ロボット1(ロボット本体10)の作動を制御する。
前述したように、ロボット1は、ロボット制御装置20により、ロボット本体10(アーム12〜15、リスト16等)、第1電子カメラ71、第2電子カメラ72の作動を制御することにより、ハンド9で把持物41を把持し、把持物41を搬送し、その把持物41の挿入部412を挿入対象物51に形成された穴52に挿入する動作を行う。
まず、第1の走査において、角度θを変更する際は、把持物41が所定の軸回りに回動して傾倒する。第1の走査では、把持物41は、その軸方向(図7中の紙面に対して垂直な方向)に移動させることが好ましい。後述する第2の走査では、後述するように、把持物41を前記軸方向に移動させることが好ましいが、第2の走査において把持物41を前記軸方向に移動させる場合、第1の走査における把持物41の移動方向が前記第2の走査のときと同一となり、これによって、より適正な角度θを設定することができる。すなわち、第1の走査において、把持物41の姿勢に対してその把持物41を移動させる方向は、第2の走査において、把持物41の姿勢に対してその把持物41を移動させる方向と同一であることが好ましい。
この角度θの設定においては、第1の走査中に角度θを徐々に増加または徐々に減少させる第1の方法と、角度θを変更して第1の走査を複数回行い、各回の第1の走査中は、それぞれ、角度θを一定にする第2の方法とがあり、そのうちのいずれか一方で行う。
なお、前記第1の方法と同様に、角度θは、摩擦力が最小のときの値に設定することが好ましく、また、角度θを変更する範囲の上限値および下限値の好適範囲は、それぞれ、前記第1の方法で述べた値と同様である。
まず、前述したように、第1の走査において、角度θを変更する際は、把持物41が所定の軸回りに回動して傾倒する。第2の走査では、把持物41は、その軸方向(図8中の紙面に対して垂直な方向)に移動させることが好ましい。これにより、第2の走査において、把持物41の挿入部412が穴52にかかったとき、その穴52の外周部により挿入部412が振られてしまうことを防止することができ、予定のラインに沿って挿入部412を移動させることができる。
この穴52の位置の特定においては、挿入対象物51からの反力が減少したときの位置を穴52の位置と認定する。なお、挿入部412を挿入対象物52に押し当てたときの挿入対象物51からの反力は、挿入対象物51の穴52の位置では、穴52のない位置に比べて小さくなる。また、前記反力は、挿入部412の位置が穴52の中心軸に近いほど、すなわち、穴52により挿入対象物52の表面に形成された開口53の中心に近いほど小さくなる。位置特定部22は、この関係を用いて、穴52の位置、すなわち、穴52により挿入対象物52の表面に形成された開口53の中心の位置を特定する。以下、1例を挙げ、具体的に説明する。
以下では、1例として、第2の走査を位置を変更して5回行った場合について説明する。なお、第2の走査の回数は、5回に限定されず、2〜4回、または6回以上でもよく、通常は、多数回行うことが好ましい。第2の走査を多数回行うことで、精度を向上させることができる。
図9(b)に示すように、ラインL1、L5では、それぞれ、反力は、一定の高い値を示す。また、ラインL2、L4では、それぞれ、反力は、穴52の位置で少し低下する。また、ラインL3では、反力は、穴52の位置で大きく低下する。
また、穴52の開口53の中心のx軸方向の位置、すなわちx座標は、ラインL2、L3、L4において、それぞれ、反力が最小となるときのx座標であることが判る。このため、位置特定部22は、前記のように穴52の開口53の中心のx軸方向の位置を特定する。このようにして、穴52の開口53の中心の位置が求められる。
なお、本実施形態では、挿入部412を挿入対象物52に押し当てたときの挿入対象物51からの反力に基づいて穴52の位置を特定するように構成されているが、本発明では、これに限らず、挿入対象物51からの他の方向の反力に基づいて穴52の位置を特定するように構成してもよい。
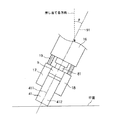
図11に示すように、ハンド9により、把持物41を傾斜させた状態で把持してもよい。この場合は、図11(a)、図11(c)に示す状態のとき、挿入部412を挿入対象物52に押し当てたときの挿入対象物51からの反力が小さくなり、図11(b)に示す状態のとき、その反力が大きくなる。
図12に示すように、把持物41は、その端部が尖っていてもよい。この場合は、図12(a)、図12(c)に示す状態のとき、挿入部412を挿入対象物52に押し当てたときの挿入対象物51からの反力が大きくなり、図12(b)に示す状態のとき、その反力が小さくなる。
以下、第2実施形態について説明するが、前述した第1実施形態との相違点を中心に説明し、同様の事項については、その説明を省略する。
第2実施形態のロボット1では、ロボット制御装置20の位置特定部22は、第2の走査において、挿入部412を挿入対象物52に押し当てたときの挿入対象物51からの反力が予め設定された閾値よりも小さときの位置を穴52の位置と認定する。
このロボット1によれば、前述した第1実施形態と同様の効果が得られる。
また、本発明は、前記各実施形態のうちの、任意の2以上の構成(特徴)を組み合わせたものであってもよい。
また、各角度センサーの方式は、それぞれ、特に限定されず、例えば、光学式、磁気式、電磁式、電気式等が挙げられる。
また、前記実施形態では、撮像装置の数は、2つであるが、本発明では、これに限定されず、撮像装置の数は、1つでもよく、また、3つ以上でもよい。但し、撮像装置の数は、複数であることが好ましい。
また、前記実施形態では、撮像装置は、ロボット本体から離間した位置に設置されているが、本発明では、これに限定されず、撮像装置は、例えば、ロボット本体に設置されていてもよい。
また、前記実施形態では、撮像装置は、固定されているが、本発明では、これに限定されず、撮像装置は、例えば、移動可能に設置されていてもよい。
Claims (21)
- 複数のアームを回動可能に連結してなるアーム連結体と、前記アーム連結体に連結される力覚センサーと、前記力覚センサーに装着されて把持物を把持するハンドと、を含むロボット本体と、
前記ロボット本体の作動を制御するロボット制御装置と、を備え、
前記ロボット制御装置は、前記ハンドが把持した前記把持物の挿入部を押し当て面に押し当てつつ前記把持物を前記押し当て面に沿って移動させる第1の走査を、前記挿入部の押し当て方向と、前記把持物を把持する方向に対して垂直な把持軸と、のなす角度θを変更して行い、前記第1の走査の際、前記力覚センサーにより反力の検出を行い、前記力覚センサーの検出結果に基づいて前記角度θを設定する角度設定部と、
前記挿入部の押し当て方向と前記把持軸とのなす角度θを前記角度設定部により設定された値に設定した状態で、前記ハンドが把持した前記把持物の前記挿入部を挿入対象物に押し当てつつ前記把持物を前記挿入対象物に沿って移動させる第2の走査を行い、前記第2の走査の際、前記力覚センサーにより反力の検出を行い、前記力覚センサーの検出結果に基づいて前記挿入箇所の位置を特定する位置特定部と、
前記把持物の前記挿入部を前記挿入箇所に挿入する挿入動作制御部と、を備えることを特徴とするロボット。 - 前記角度設定部は、前記力覚センサーの検出結果に基づいて、前記挿入部と前記押し当て面との間の摩察力を求め、前記摩擦力に基づいて前記角度θを設定するよう構成されている請求項1に記載のロボット。
- 前記角度設定部は、前記第1の走査中に、前記角度θを徐々に増加または徐々に減少させるよう構成されている請求項1または2に記載のロボット。
- 前記角度設定部は、前記力覚センサーの検出結果に基づいて、前記挿入部と前記押し当て面との間の摩察力を求め、前記摩擦力が一定のときの前記角度θの値に前記角度θを設定するか、または前記摩擦力が徐々に増加または徐々に減少するときの前記角度θの値の範囲内に前記角度θを設定するよう構成されている請求項3に記載のロボット。
- 前記角度設定部は、前記角度θを変更して前記第1の走査を複数回行い、前記各回の前記第1の走査中は、それぞれ、前記角度θを一定にするよう構成されている請求項1に記載のロボット。
- 前記位置特定部は、前記力覚センサーの検出結果に基づいて、前記挿入部を前記挿入対象物に押し当てたときの前記挿入対象物からの反力を求め、前記挿入対象物からの反力に基づいて前記挿入箇所の位置を特定するよう構成されている請求項1ないし5のいずれか1項に記載のロボット。
- 前記位置特定部は、前記挿入対象物からの反力が減少したときの位置を前記挿入箇所の位置と認定するよう構成されている請求項6に記載のロボット。
- 前記位置特定部は、前記挿入対象物からの反力が閾値よりも小さいときの位置を前記挿入箇所の位置と認定するよう構成されている請求項6に記載のロボット。
- 前記位置特定部は、前記第2の走査の位置を変更して前記第2の走査を複数回行って、前記挿入箇所の位置を特定するよう構成されている請求項1ないし8のいずれか1項に記載のロボット。
- 前記位置特定部は、前記第2の走査の位置を変更して前記第2の走査を複数回行って、前記挿入対象物からの反力が最小のときの位置を前記挿入箇所の位置と認定するよう構成されている請求項6に記載のロボット。
- 前記押し当て面は、前記挿入対象物または前記ロボット本体の稼働範囲に設置された構造物に設けられたものである請求項1ないし10のいずれか1項に記載のロボット。
- 前記位置特定部が特定する前記挿入箇所の位置は、前記挿入対象物の表面に形成された開口の中心である請求項1ないし11のいずれか1項に記載のロボット。
- 前記ロボット制御装置は、前記第2の走査を行う走査領域を前記第2の走査の前に設定する走査領域設定部を有する請求項1ないし12のいずれか1項に記載のロボット。
- 前記ハンドと、前記把持物と、前記挿入対象物とを含む領域を撮像し、撮像データを得る撮像装置を有し、
前記走査領域設定部は、前記画像データに基づいて前記走査領域を設定するよう構成されている請求項13に記載のロボット。 - 前記角度θを変更する際は、前記把持物が軸回りに回動して傾倒し、
角度設定部は、前記第1の走査において、前記把持物を前記軸方向に移動させるよう構成されている請求項1ないし14のいずれか1項に記載のロボット。 - 前記角度θを変更する際は、前記把持物が軸回りに回動して傾倒し、
位置特定部は、前記第2の走査において、前記把持物を前記軸方向に移動させるよう構成されている請求項1ないし15のいずれか1項に記載のロボット。 - 複数のアームを回動可能に連結してなるアーム連結体と、前記アーム連結体に連結される力覚センサーと、前記力覚センサーに装着されて把持物を把持するハンドと、を含むロボット本体の作動を制御するロボット制御装置であって、
前記ハンドが把持した前記把持物の挿入部を押し当て面に押し当てつつ前記把持物を前記押し当て面に沿って移動させる第1の走査を、前記挿入部の押し当て方向と、前記把持物を把持する方向に対して垂直な把持軸と、のなす角度θを変更して行い、前記第1の走査の際、前記力覚センサーにより、前記挿入部と前記押し当て面との間の摩察力を検出し、前記力覚センサーの検出結果に基づいて前記角度θを設定する角度設定部と、
前記角度θを前記角度設定部により設定された値に設定した状態で、前記ハンドが把持した前記把持物の前記挿入部を挿入対象物に押し当てつつ前記把持物を前記挿入対象物に沿って移動させる第2の走査を行い、前記第2の走査の際、前記力覚センサーにより、前記挿入部を前記挿入対象物に押し当てたときの反力を検出し、前記力覚センサーの検出結果に基づいて前記挿入箇所の位置を特定する位置特定部と、
前記把持物の前記挿入部を前記挿入箇所に挿入する挿入動作制御部と、を備えることを特徴とするロボット制御装置。 - 前記角度設定部は、前記力覚センサーの検出結果に基づいて、前記挿入部と前記押し当て面との間の摩察力を求め、前記摩擦力に基づいて前記角度θを設定するよう構成されている請求項17に記載のロボット制御装置。
- 前記位置特定部は、前記力覚センサーの検出結果に基づいて、前記挿入部を前記挿入対象物に押し当てたときの前記挿入対象物からの反力を求め、前記挿入対象物からの反力に基づいて前記挿入箇所の位置を特定するよう構成されている請求項17または18に記載のロボット制御装置。
- 前記位置特定部は、前記挿入対象物からの反力が減少したときの位置を前記挿入箇所の位置と認定するよう構成されている請求項19に記載のロボット制御装置。
- 複数のアームが回動可能に連結してなるアーム連結体と、前記アーム連結体に連結される力覚センサーと、前記力覚センサーに装着されて把持物を把持するハンドと、を含み、
前記把持物を押し当て面へ押し当てる傾斜角度を変えながら移動させ、前記力覚センサーによる摩擦力の検出によって、前記把持物の押し当てられる部分が鋭角となる押し当て角度を探索し、
前記傾斜角度を前記押し当て角度に設定して、前記把持物の挿入部を挿入する挿入対象物の挿入箇所の位置を探索し、前記挿入部を前記挿入箇所に挿入することを特徴とするロボット。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013028664A JP2014155994A (ja) | 2013-02-18 | 2013-02-18 | ロボットおよびロボット制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013028664A JP2014155994A (ja) | 2013-02-18 | 2013-02-18 | ロボットおよびロボット制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2014155994A true JP2014155994A (ja) | 2014-08-28 |
| JP2014155994A5 JP2014155994A5 (ja) | 2016-04-07 |
Family
ID=51577232
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013028664A Withdrawn JP2014155994A (ja) | 2013-02-18 | 2013-02-18 | ロボットおよびロボット制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014155994A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105773592A (zh) * | 2016-04-13 | 2016-07-20 | 杨杰 | 一种用于医疗救助的可旋转单臂机器人 |
| KR101997797B1 (ko) * | 2018-09-21 | 2019-07-08 | 엘아이지넥스원 주식회사 | 다기능 근력지원 장치 |
| CN112297002A (zh) * | 2019-08-01 | 2021-02-02 | 发那科株式会社 | 进行多点嵌合的机器人控制系统 |
| CN113272105A (zh) * | 2019-01-22 | 2021-08-17 | 三菱电机株式会社 | 用于控制机器人臂的系统和方法 |
-
2013
- 2013-02-18 JP JP2013028664A patent/JP2014155994A/ja not_active Withdrawn
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105773592A (zh) * | 2016-04-13 | 2016-07-20 | 杨杰 | 一种用于医疗救助的可旋转单臂机器人 |
| KR101997797B1 (ko) * | 2018-09-21 | 2019-07-08 | 엘아이지넥스원 주식회사 | 다기능 근력지원 장치 |
| CN113272105A (zh) * | 2019-01-22 | 2021-08-17 | 三菱电机株式会社 | 用于控制机器人臂的系统和方法 |
| CN113272105B (zh) * | 2019-01-22 | 2024-05-03 | 三菱电机株式会社 | 用于控制机器人臂的系统和方法 |
| CN112297002A (zh) * | 2019-08-01 | 2021-02-02 | 发那科株式会社 | 进行多点嵌合的机器人控制系统 |
| JP2021024011A (ja) * | 2019-08-01 | 2021-02-22 | ファナック株式会社 | 複数点嵌合を行うロボット制御システム |
| JP7351667B2 (ja) | 2019-08-01 | 2023-09-27 | ファナック株式会社 | 複数点嵌合を行うロボット制御システム、制御方法、コンピュータのプログラム、および制御装置 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11090814B2 (en) | Robot control method | |
| US10532461B2 (en) | Robot and robot system | |
| US10589424B2 (en) | Robot control device, robot, and robot system | |
| US10434646B2 (en) | Robot control apparatus, robot, and robot system | |
| US10618181B2 (en) | Robot control device, robot, and robot system | |
| US10759051B2 (en) | Architecture and methods for robotic mobile manipulation system | |
| WO2017033351A1 (ja) | 遠隔操作ロボットシステム | |
| JP6661925B2 (ja) | 制御装置、ロボットおよびロボットシステム | |
| CN108972538B (zh) | 机器人控制装置、机器人及机器人系统 | |
| EP2832503A1 (en) | Robot system and product manufacturing method | |
| US20180194009A1 (en) | Robot control device and robotic system | |
| EP2489482A2 (en) | Work Picking System | |
| JP2014155994A (ja) | ロボットおよびロボット制御装置 | |
| JP2014240106A (ja) | ロボット、ロボット制御装置およびロボットの駆動方法 | |
| JP6322949B2 (ja) | ロボット制御装置、ロボットシステム、ロボット、ロボット制御方法及びロボット制御プログラム | |
| JP6665450B2 (ja) | ロボット、制御装置、及びロボットシステム | |
| JP2014188642A (ja) | ロボットおよびロボット制御方法 | |
| JP6314429B2 (ja) | ロボット、ロボットシステム、及びロボット制御装置 | |
| Bolopion et al. | Stable haptic feedback based on a dynamic vision sensor for microrobotics | |
| JP2019042853A (ja) | 画像情報処理装置、把持システム、および画像情報処理方法 | |
| JP2014188640A (ja) | ロボットおよびロボット制御方法 | |
| JP2015085499A (ja) | ロボット、ロボットシステム、制御装置及び制御方法 | |
| JP2014124734A (ja) | ロボットおよび動作軌道制御システム | |
| US11498218B2 (en) | Robot | |
| JP2004160614A (ja) | 自動作業教示システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20150109 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20160216 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160216 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20160610 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20160624 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161226 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170110 |
|
| A761 | Written withdrawal of application |
Free format text: JAPANESE INTERMEDIATE CODE: A761 Effective date: 20170203 |