JP2017123720A - 電流検出装置、モータ制御システム、画像処理装置及びシート搬送装置 - Google Patents
電流検出装置、モータ制御システム、画像処理装置及びシート搬送装置 Download PDFInfo
- Publication number
- JP2017123720A JP2017123720A JP2016001164A JP2016001164A JP2017123720A JP 2017123720 A JP2017123720 A JP 2017123720A JP 2016001164 A JP2016001164 A JP 2016001164A JP 2016001164 A JP2016001164 A JP 2016001164A JP 2017123720 A JP2017123720 A JP 2017123720A
- Authority
- JP
- Japan
- Prior art keywords
- current detection
- unit
- motor
- voltage
- current
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000001514 detection method Methods 0.000 title claims description 82
- 238000012545 processing Methods 0.000 title claims description 57
- 238000000034 method Methods 0.000 claims abstract description 12
- 238000012937 correction Methods 0.000 claims description 43
- 238000009499 grossing Methods 0.000 claims description 29
- 238000012935 Averaging Methods 0.000 claims description 8
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 claims description 8
- 230000008569 process Effects 0.000 claims description 6
- 230000007723 transport mechanism Effects 0.000 claims description 3
- 230000006870 function Effects 0.000 description 41
- 238000004891 communication Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 19
- 239000011521 glass Substances 0.000 description 15
- 238000004364 calculation method Methods 0.000 description 10
- 230000032258 transport Effects 0.000 description 8
- 230000003321 amplification Effects 0.000 description 7
- 230000000694 effects Effects 0.000 description 7
- 238000003199 nucleic acid amplification method Methods 0.000 description 7
- 230000002093 peripheral effect Effects 0.000 description 7
- 238000005259 measurement Methods 0.000 description 6
- 238000006243 chemical reaction Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 230000010365 information processing Effects 0.000 description 3
- 239000003990 capacitor Substances 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 1
- 239000003086 colorant Substances 0.000 description 1
- 230000003111 delayed effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 238000012886 linear function Methods 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 239000002985 plastic film Substances 0.000 description 1
- 239000000758 substrate Substances 0.000 description 1
Images













Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H7/00—Controlling article feeding, separating, pile-advancing, or associated apparatus, to take account of incorrect feeding, absence of articles, or presence of faulty articles
- B65H7/20—Controlling associated apparatus
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H5/00—Feeding articles separated from piles; Feeding articles to machines
- B65H5/06—Feeding articles separated from piles; Feeding articles to machines by rollers or balls, e.g. between rollers
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R15/00—Details of measuring arrangements of the types provided for in groups G01R17/00 - G01R29/00, G01R33/00 - G01R33/26 or G01R35/00
- G01R15/14—Adaptations providing voltage or current isolation, e.g. for high-voltage or high-current networks
- G01R15/146—Measuring arrangements for current not covered by other subgroups of G01R15/14, e.g. using current dividers, shunts, or measuring a voltage drop
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/65—Apparatus which relate to the handling of copy material
- G03G15/6529—Transporting
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G15/00—Apparatus for electrographic processes using a charge pattern
- G03G15/80—Details relating to power supplies, circuits boards, electrical connections
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/28—Arrangements for controlling current
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00127—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture
- H04N1/0032—Connection or combination of a still picture apparatus with another apparatus, e.g. for storage, processing or transmission of still picture signals or of information associated with a still picture with a medium handling apparatus, e.g. a sheet sorter
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00885—Power supply means, e.g. arrangements for the control of power supply to the apparatus or components thereof
- H04N1/00888—Control thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N1/00—Scanning, transmission or reproduction of documents or the like, e.g. facsimile transmission; Details thereof
- H04N1/00885—Power supply means, e.g. arrangements for the control of power supply to the apparatus or components thereof
- H04N1/00904—Arrangements for supplying power to different circuits or for supplying power at different levels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65H—HANDLING THIN OR FILAMENTARY MATERIAL, e.g. SHEETS, WEBS, CABLES
- B65H2403/00—Power transmission; Driving means
- B65H2403/90—Machine drive
- B65H2403/92—Electric drive
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R19/00—Arrangements for measuring currents or voltages or for indicating presence or sign thereof
- G01R19/0092—Arrangements for measuring currents or voltages or for indicating presence or sign thereof measuring current only
-
- G—PHYSICS
- G03—PHOTOGRAPHY; CINEMATOGRAPHY; ANALOGOUS TECHNIQUES USING WAVES OTHER THAN OPTICAL WAVES; ELECTROGRAPHY; HOLOGRAPHY
- G03G—ELECTROGRAPHY; ELECTROPHOTOGRAPHY; MAGNETOGRAPHY
- G03G2215/00—Apparatus for electrophotographic processes
- G03G2215/01—Apparatus for electrophotographic processes for producing multicoloured copies
- G03G2215/0103—Plural electrographic recording members
- G03G2215/0119—Linear arrangement adjacent plural transfer points
- G03G2215/0122—Linear arrangement adjacent plural transfer points primary transfer to an intermediate transfer belt
- G03G2215/0125—Linear arrangement adjacent plural transfer points primary transfer to an intermediate transfer belt the linear arrangement being horizontal or slanted
- G03G2215/0129—Linear arrangement adjacent plural transfer points primary transfer to an intermediate transfer belt the linear arrangement being horizontal or slanted horizontal medium transport path at the secondary transfer
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
- H02P27/08—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters with pulse width modulation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/0008—Connection or combination of a still picture apparatus with another apparatus
- H04N2201/001—Sharing resources, e.g. processing power or memory, with a connected apparatus or enhancing the capability of the still picture apparatus
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2201/00—Indexing scheme relating to scanning, transmission or reproduction of documents or the like, and to details thereof
- H04N2201/0077—Types of the still picture apparatus
- H04N2201/0094—Multifunctional device, i.e. a device capable of all of reading, reproducing, copying, facsimile transception, file transception
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Power Engineering (AREA)
- Mechanical Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
- Control Of Electric Motors In General (AREA)
- Control Or Security For Electrophotography (AREA)
Abstract
Description
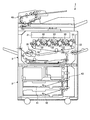
まず、図1に、第1の実施の形態の複合機1の断面図を示す。この第1の実施の形態となる複合機1は、一例としてコピー機能、スキャナ機能、プリンタ機能、およびファクシミリ機能を備えている。また、複合機1は、自動原稿搬送装置(ADF:Auto Document Feeder)40と、給紙部2と、画像形成部3とを備えている。給紙部2は、用紙サイズの異なる記録紙を収納する給紙カセット41,42と、給紙カセット41,42に収納された記録紙を、画像形成部3の画像形成位置まで搬送する各種ローラからなる給紙手段43とを有している。
次に、第2の実施の形態の複合機の説明をする。上述の第1の実施の形態の複合機1は、補正処理部173が、制御信号生成部171からの制御信号(CTL)で、シャント抵抗間電圧を補正し、補正したシャント抵抗間電圧及びシャント抵抗Rfの抵抗値「Rdet」でモータ104のコイル電流「i」を算出する例であった。これに対して、第2の実施の形態の複合機は、PWM変換部172により、パルス幅変調信号(PWM信号)の信号形態に変換された制御信号(Vctl)のパルス幅でシャント抵抗間電圧を補正して、コイル電流「i」を算出する例である。なお、上述の第1の実施の形態と、以下に説明する第2の実施の形態とでは、この点のみが異なる。このため、以下、差異の説明のみ行い、重複説明は省略する。
次に、第3の実施の形態の複合機の説明をする。上述の第2の実施の形態の複合機1は、補正処理部173において、パルス幅変調信号(PWM信号)の信号形態に変換された制御信号(Vctl)のパルス幅でシャント抵抗間電圧を補正して、コイル電流「i」を算出する例であった。これに対して、第3の実施の形態は、パルス幅変調信号(PWM信号)の信号形態に変換された制御信号(Vctl)を平均化処理し、この平均化処理した制御信号(Vctl)で、シャント抵抗間電圧を補正して、コイル電流「i」を算出する例である。なお、上述の第2の実施の形態と、以下に説明する第3の実施の形態とでは、この点のみが異なる。このため、以下、差異の説明のみ行い、重複説明は省略する。
次に、第4の実施の形態の複合機の説明をする。上述の第2の実施の形態の複合機1は、補正処理部173において、パルス幅変調信号(PWM信号)の信号形態に変換された制御信号(Vctl)のパルス幅でシャント抵抗間電圧を補正して、コイル電流「i」を算出する例であった。これに対して、第4の実施の形態は、シャント抵抗間電圧のパルス幅で、シャント抵抗間電圧を補正して、コイル電流「i」を算出する例である。なお、上述の第2の実施の形態と、以下に説明する第4の実施の形態とでは、この点のみが異なる。このため、以下、差異の説明のみ行い、重複説明は省略する。
次に、第5の実施の形態の複合機の説明をする。この第5の実施の形態の複合機は、シャント抵抗間電圧を二値化することで生成した、シャント抵抗間電圧のパルス幅を平滑化及び平均化した値で、シャント抵抗間電圧を補正して、コイル電流「i」を算出する例である。なお、上述の各実施の形態と、以下に説明する第5の実施の形態とでは、この点のみが異なる。このため、以下、差異の説明のみ行い、重複説明は省略する。
2 給紙部
3 画像形成部
10 読取部
11 コンタクトガラス
12 基準白板
13 光源
14 第1キャリッジ
15 第2キャリッジ
16 レンズ
17 センサボード
18 スキャナモータ
19 読み取り窓
21 原稿トレイ
22 原稿
23 搬送ドラム
24 排紙ローラ
25 排紙トレイ
26 背景部
28 カバー部材
31 露光装置
32 感光体ドラム
33 現像装置
34 転写ベルト
35 定着装置
39 基板
40 自動原稿搬送装置(ADF)
41 給紙カセット
42 給紙カセット
43 給紙手段
101 CPU
102 モータ制御部
103 ドライバ
104 モータ
105 負荷
106 差分検出部
107 電流検知回路
108 コイル電流推定部
109 回転速度検出部
110 回転位置検出部
159 入力処理回路
164 平滑化回路
165 非反転増幅回路
166 平滑化回路
167 ADC
171 制御信号生成部
172 PWM変換部
173 補正処理部
174 推定値算出部
181 サーバ装置
182 トルク推定処理部
200 カウンタ
211 第1の平滑化回路
212 第2の平滑化回路
213 第1のADC
214 第2のADC
222 二値化回路
230 二値化回路
231 第1の平滑化回路
232 第2の平滑化回路
241 第1のADC
242 第2のADC
310 本体
312 ROM
313 RAM
314 HDD
315 通信I/F
317 エンジン部
318 システムバス
320 操作部
321 CPU
322 RAM
324 フラッシュメモリ
327 操作パネル
328 システムバス
Claims (12)
- 対象物に与える駆動力を示す制御電圧値に基づいて制御信号を生成する駆動信号生成部と、
前記駆動信号生成部で生成される前記制御信号に基づいて出力される電流値を検知する電流検知部と、
前記電流検知部で検知された前記電流値を、前記制御電圧値の大きさに基づいて補正する補正部と
を有する電流検出装置。 - 前記電流検知部で検知された前記制御信号に基づいて出力される電流値を平滑化する平滑化部を、さらに備えること
を特徴とする請求項1に記載の電流検出装置。 - 前記補正部は、前記電流検知部で検知された前記電流値を、所定の電圧値に対する前記制御電圧値の大きさに基づいて補正すること
を特徴とする請求項1又は請求項2に記載の電流検出装置。 - 前記制御信号は、パルス幅変調信号であること
を特徴とする請求項1又は請求項2に記載の電流検出装置。 - 前記パルス幅変調信号である前記制御信号を平均化処理する平均化部を、さらに備え、
前記補正部は、前記電流検知部で検知された前記電流値を、前記平均化処理した前記制御信号で補正すること
を特徴とする請求項4に記載の電流検出装置。 - 前記電流検知部で検知される前記制御信号の電流値を二値化してパルス幅を検出するパルス幅検出部を、さらに備え、
前記補正部は、前記電流検知部で検知された前記電流値を、前記パルス幅検出部で検出したパルス幅で補正すること
を特徴とする請求項1又は請求項2に記載の電流検出装置。 - 前記パルス幅検出部で検出されたパルス幅を平均化処理する平均化処理部を、さらに備え、
前記補正部は、前記電流検知部で検知された前記電流値を、前記平均化処理部で平均化処理されたパルス幅で補正すること
を特徴とする請求項6に記載の電流検出装置。 - 前記電流検知部は、一端が前記駆動信号生成部に接続され、他端がグランドに接続されたシャント抵抗を備えること
を特徴とする請求項1から請求項7のうち、いずれか一項に記載の電流検出装置。 - 前記電流検知部は、一端が前記対象物の駆動電源側に接続され、他端が前記駆動信号生成部に接続されたシャント抵抗を備えること
を特徴とする請求項1から請求項7のうち、いずれか一項に記載の電流検出装置。 - 前記対象物であるモータと、
請求項1から請求項9のうち、いずれか一項に記載の電流検出装置と
を有するモータ制御システム。 - 画像処理を行う画像処理部と、
請求項1から請求項9のうち、いずれか一項に記載の電流検出装置と
を有する画像処理装置。 - シートの搬送機構と、
前記搬送機構を駆動する、前記対象物であるモータと、
請求項1から請求項9のうち、いずれか一項に記載の電流検出装置と
を有するシート搬送装置。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016001164A JP6672799B2 (ja) | 2016-01-06 | 2016-01-06 | 電流検出装置、モータ制御システム、画像処理装置及びシート搬送装置 |
| US15/397,054 US10472194B2 (en) | 2016-01-06 | 2017-01-03 | Current detecting device, motor controlling system, image forming apparatus, sheet conveying device, robot, and current detecting method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016001164A JP6672799B2 (ja) | 2016-01-06 | 2016-01-06 | 電流検出装置、モータ制御システム、画像処理装置及びシート搬送装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017123720A true JP2017123720A (ja) | 2017-07-13 |
| JP6672799B2 JP6672799B2 (ja) | 2020-03-25 |
Family
ID=59235339
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016001164A Active JP6672799B2 (ja) | 2016-01-06 | 2016-01-06 | 電流検出装置、モータ制御システム、画像処理装置及びシート搬送装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US10472194B2 (ja) |
| JP (1) | JP6672799B2 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019234826A1 (ja) * | 2018-06-05 | 2019-12-12 | シナノケンシ株式会社 | 監視システム |
| JP2020038313A (ja) * | 2018-09-05 | 2020-03-12 | コニカミノルタ株式会社 | 画像形成装置 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10763740B2 (en) | 2016-04-15 | 2020-09-01 | Emerson Climate Technologies, Inc. | Switch off time control systems and methods |
| US11387729B2 (en) | 2016-04-15 | 2022-07-12 | Emerson Climate Technologies, Inc. | Buck-converter-based drive circuits for driving motors of compressors and condenser fans |
| US10656026B2 (en) | 2016-04-15 | 2020-05-19 | Emerson Climate Technologies, Inc. | Temperature sensing circuit for transmitting data across isolation barrier |
| US10284132B2 (en) | 2016-04-15 | 2019-05-07 | Emerson Climate Technologies, Inc. | Driver for high-frequency switching voltage converters |
| US10305373B2 (en) | 2016-04-15 | 2019-05-28 | Emerson Climate Technologies, Inc. | Input reference signal generation systems and methods |
| US9933842B2 (en) | 2016-04-15 | 2018-04-03 | Emerson Climate Technologies, Inc. | Microcontroller architecture for power factor correction converter |
| US10277115B2 (en) | 2016-04-15 | 2019-04-30 | Emerson Climate Technologies, Inc. | Filtering systems and methods for voltage control |
| EP3686611B1 (en) * | 2019-01-25 | 2023-09-27 | Fluke Corporation | Electronic measuring device |
| JP2022061429A (ja) * | 2020-10-06 | 2022-04-18 | キヤノン株式会社 | 制御装置、画像形成装置及び制御方法 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09308281A (ja) * | 1996-05-16 | 1997-11-28 | Honda Motor Co Ltd | 電動車両におけるモータ駆動制御装置 |
| JPH10100914A (ja) * | 1996-10-01 | 1998-04-21 | Nippon Seiko Kk | 電動パワーステアリング装置の制御装置 |
| JPH1141979A (ja) * | 1997-07-11 | 1999-02-12 | Hitachi Ltd | インバータの制御方法 |
| US20100002744A1 (en) * | 2008-07-03 | 2010-01-07 | Emerson Electric Co. | Method And System For Calibrating A Motor Control Circuit To Improve Temperature Measurement In An Electrical Motor |
| JP2011135631A (ja) * | 2009-12-22 | 2011-07-07 | Hitachi Automotive Systems Ltd | パワーステアリング装置 |
| US20140049199A1 (en) * | 2012-08-17 | 2014-02-20 | Natsuko Ishizuka | Motor control device, motor control method, and image forming apparatus |
Family Cites Families (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001119957A (ja) | 1999-10-15 | 2001-04-27 | Yamaha Motor Co Ltd | 電源電流検出装置 |
| JP3951975B2 (ja) * | 2003-07-22 | 2007-08-01 | 株式会社日立製作所 | 交流電動機の制御装置,交流電動機の制御方法及びモジュール |
| JP4666970B2 (ja) * | 2004-07-28 | 2011-04-06 | キヤノン株式会社 | 搬送装置及び該装置を備えた記録装置 |
| CN101151793A (zh) * | 2005-03-29 | 2008-03-26 | 株式会社安川电机 | 电流控制器及其电流偏移校正方法 |
| JP5136568B2 (ja) | 2010-01-18 | 2013-02-06 | 三菱電機株式会社 | 電動機の制御回路、及びその制御回路を用いた空気調和機 |
| JP2012176827A (ja) | 2011-02-25 | 2012-09-13 | Ricoh Co Ltd | ジャム処理アシスト装置及び前記ジャム処理アシスト装置を備えた画像形成装置 |
| JP5811438B2 (ja) | 2011-04-22 | 2015-11-11 | 株式会社リコー | モータ駆動装置 |
| US8928270B2 (en) | 2011-09-26 | 2015-01-06 | Ricoh Company, Ltd. | Electric motor system and motor control method |
| US8662620B2 (en) * | 2011-11-21 | 2014-03-04 | Xerox Corporation | Indirect temperature monitoring for thermal control of a motor in a printer |
| JP6194583B2 (ja) | 2012-01-31 | 2017-09-13 | 株式会社リコー | モータ制御装置、モータ制御方法、モータシステム、搬送装置及び画像形成装置 |
| JP5713031B2 (ja) | 2012-02-06 | 2015-05-07 | 株式会社リコー | モータ制御装置、モータシステム、搬送装置、画像形成装置、モータ制御方法およびプログラム |
| JP5747831B2 (ja) | 2012-02-07 | 2015-07-15 | 株式会社リコー | モータ制御装置、搬送装置、画像形成装置、モータ制御方法およびプログラム |
| JP6064576B2 (ja) * | 2012-03-12 | 2017-01-25 | 株式会社リコー | モータ制御装置およびモータ制御方法 |
| JP2013219871A (ja) * | 2012-04-05 | 2013-10-24 | Canon Inc | モータ制御装置 |
| JP5974763B2 (ja) * | 2012-09-19 | 2016-08-23 | ブラザー工業株式会社 | 画像形成装置 |
| KR101994382B1 (ko) * | 2012-11-09 | 2019-06-28 | 휴렛-팩커드 디벨롭먼트 컴퍼니, 엘.피. | 모터 제어 장치, 이를 포함하는 화상형성장치 및 모터 제어 방법 |
| JP5900432B2 (ja) * | 2013-07-23 | 2016-04-06 | コニカミノルタ株式会社 | 画像形成装置 |
| JP2015080398A (ja) | 2013-09-13 | 2015-04-23 | 株式会社リコー | 負荷トルク推定装置、画像形成装置、負荷トルク推定方法及びプログラム |
| JP2015079488A (ja) | 2013-09-13 | 2015-04-23 | 株式会社リコー | 負荷トルク推定装置、画像形成装置、負荷トルク推定方法及びプログラム |
| JP6476992B2 (ja) | 2015-02-24 | 2019-03-06 | 株式会社リコー | 負荷トルク推定装置、画像形成装置、負荷トルク推定方法及びプログラム |
| JP2016176823A (ja) | 2015-03-20 | 2016-10-06 | 株式会社リコー | 電流計測装置、画像形成装置、搬送装置、及び電流計測方法 |
-
2016
- 2016-01-06 JP JP2016001164A patent/JP6672799B2/ja active Active
-
2017
- 2017-01-03 US US15/397,054 patent/US10472194B2/en not_active Expired - Fee Related
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH09308281A (ja) * | 1996-05-16 | 1997-11-28 | Honda Motor Co Ltd | 電動車両におけるモータ駆動制御装置 |
| JPH10100914A (ja) * | 1996-10-01 | 1998-04-21 | Nippon Seiko Kk | 電動パワーステアリング装置の制御装置 |
| JPH1141979A (ja) * | 1997-07-11 | 1999-02-12 | Hitachi Ltd | インバータの制御方法 |
| US20100002744A1 (en) * | 2008-07-03 | 2010-01-07 | Emerson Electric Co. | Method And System For Calibrating A Motor Control Circuit To Improve Temperature Measurement In An Electrical Motor |
| JP2011135631A (ja) * | 2009-12-22 | 2011-07-07 | Hitachi Automotive Systems Ltd | パワーステアリング装置 |
| US20140049199A1 (en) * | 2012-08-17 | 2014-02-20 | Natsuko Ishizuka | Motor control device, motor control method, and image forming apparatus |
| JP2014039417A (ja) * | 2012-08-17 | 2014-02-27 | Ricoh Co Ltd | モータ制御装置およびモータ制御方法、ならびに、画像形成装置 |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019234826A1 (ja) * | 2018-06-05 | 2019-12-12 | シナノケンシ株式会社 | 監視システム |
| JP2020038313A (ja) * | 2018-09-05 | 2020-03-12 | コニカミノルタ株式会社 | 画像形成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20170190530A1 (en) | 2017-07-06 |
| US10472194B2 (en) | 2019-11-12 |
| JP6672799B2 (ja) | 2020-03-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6672799B2 (ja) | 電流検出装置、モータ制御システム、画像処理装置及びシート搬送装置 | |
| US8849134B2 (en) | Image forming apparatus having banding correction function | |
| JP2020038313A (ja) | 画像形成装置 | |
| JP6221222B2 (ja) | シート搬送装置、画像形成装置、シート厚さ検出システム及びシート厚さ検出プログラム | |
| CN111342732B (zh) | 电动机控制装置以及图像形成装置 | |
| JP2009065737A (ja) | モータ駆動制御装置及び画像形成装置 | |
| EP3136585B1 (en) | Motor driving apparatus, motor control apparatus, conveyance apparatus and motor driving method | |
| JP2021192589A (ja) | モータ制御装置及び画像形成装置 | |
| JP2020150656A (ja) | モーター制御装置、ローターの磁極の初期位置推定方法、および画像形成装置 | |
| JP2017156246A (ja) | モータ接続検知装置及び方法、モータ駆動システム、並びにそれを適用した画像形成装置、及び搬送装置 | |
| CN110196538B (zh) | 图像形成装置 | |
| JPH1138700A (ja) | 画像補正方法及び画像形成装置 | |
| US11159110B2 (en) | Motor control apparatus and image forming apparatus | |
| JP4343508B2 (ja) | 画像形成装置およびその制御方法 | |
| JP6060068B2 (ja) | モーター駆動装置及び画像形成装置 | |
| JP4444556B2 (ja) | 画像形成装置およびその交流電圧調整方法 | |
| JP2006293233A (ja) | 画像形成装置およびモータ電流制御方法 | |
| US11635712B2 (en) | Motor control apparatus and image forming apparatus | |
| US11372360B2 (en) | Image forming apparatus, paper conveyance method, and non-transitory computer readable medium using both speed and position control | |
| US11483445B2 (en) | Temperature estimation of DC motor based on sensing voltage | |
| JP2019022252A (ja) | 回転異常判定装置、モータシステム、画像形成装置及び回転異常判定方法 | |
| US11323054B2 (en) | Motor control device and image forming apparatus | |
| US20220345580A1 (en) | Power control of fan driver of image forming apparatus based on pwm control signal | |
| JP2018061383A (ja) | モーター制御装置、及び画像形成装置 | |
| JP2022059809A (ja) | モータ駆動装置及び画像形成装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181207 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190925 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20191008 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20191205 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20200204 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20200217 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6672799 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |