JP2017013516A - 車両用の前照灯制御装置 - Google Patents
車両用の前照灯制御装置 Download PDFInfo
- Publication number
- JP2017013516A JP2017013516A JP2015128745A JP2015128745A JP2017013516A JP 2017013516 A JP2017013516 A JP 2017013516A JP 2015128745 A JP2015128745 A JP 2015128745A JP 2015128745 A JP2015128745 A JP 2015128745A JP 2017013516 A JP2017013516 A JP 2017013516A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- target
- mounting position
- preceding vehicle
- led
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 abstract description 30
- 230000005855 radiation Effects 0.000 abstract 2
- 238000012937 correction Methods 0.000 description 36
- 238000004364 calculation method Methods 0.000 description 21
- 238000012545 processing Methods 0.000 description 13
- 238000001514 detection method Methods 0.000 description 5
- 238000006073 displacement reaction Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 4
- 230000007423 decrease Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 238000005286 illumination Methods 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000001133 acceleration Effects 0.000 description 2
- 230000008033 biological extinction Effects 0.000 description 2
- 230000000903 blocking effect Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000758 substrate Substances 0.000 description 2
- 238000013459 approach Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 230000008094 contradictory effect Effects 0.000 description 1
- 230000005484 gravity Effects 0.000 description 1
- 230000015654 memory Effects 0.000 description 1
Images





















Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/06—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle
- B60Q1/08—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically
- B60Q1/085—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights adjustable, e.g. remotely-controlled from inside vehicle automatically due to special conditions, e.g. adverse weather, type of road, badly illuminated road signs or potential dangers
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q1/00—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor
- B60Q1/02—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments
- B60Q1/04—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights
- B60Q1/14—Arrangement of optical signalling or lighting devices, the mounting or supporting thereof or circuits therefor the devices being primarily intended to illuminate the way ahead or to illuminate other areas of way or environments the devices being headlights having dimming means
- B60Q1/1415—Dimming circuits
- B60Q1/1423—Automatic dimming circuits, i.e. switching between high beam and low beam due to change of ambient light or light level in road traffic
- B60Q1/143—Automatic dimming circuits, i.e. switching between high beam and low beam due to change of ambient light or light level in road traffic combined with another condition, e.g. using vehicle recognition from camera images or activation of wipers
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21S—NON-PORTABLE LIGHTING DEVICES; SYSTEMS THEREOF; VEHICLE LIGHTING DEVICES SPECIALLY ADAPTED FOR VEHICLE EXTERIORS
- F21S41/00—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps
- F21S41/10—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by the light source
- F21S41/14—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by the light source characterised by the type of light source
- F21S41/141—Light emitting diodes [LED]
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21S—NON-PORTABLE LIGHTING DEVICES; SYSTEMS THEREOF; VEHICLE LIGHTING DEVICES SPECIALLY ADAPTED FOR VEHICLE EXTERIORS
- F21S41/00—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps
- F21S41/10—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by the light source
- F21S41/14—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by the light source characterised by the type of light source
- F21S41/141—Light emitting diodes [LED]
- F21S41/143—Light emitting diodes [LED] the main emission direction of the LED being parallel to the optical axis of the illuminating device
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21S—NON-PORTABLE LIGHTING DEVICES; SYSTEMS THEREOF; VEHICLE LIGHTING DEVICES SPECIALLY ADAPTED FOR VEHICLE EXTERIORS
- F21S41/00—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps
- F21S41/10—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by the light source
- F21S41/14—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by the light source characterised by the type of light source
- F21S41/141—Light emitting diodes [LED]
- F21S41/151—Light emitting diodes [LED] arranged in one or more lines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21S—NON-PORTABLE LIGHTING DEVICES; SYSTEMS THEREOF; VEHICLE LIGHTING DEVICES SPECIALLY ADAPTED FOR VEHICLE EXTERIORS
- F21S41/00—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps
- F21S41/20—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by refractors, transparent cover plates, light guides or filters
- F21S41/25—Projection lenses
- F21S41/255—Lenses with a front view of circular or truncated circular outline
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F21—LIGHTING
- F21S—NON-PORTABLE LIGHTING DEVICES; SYSTEMS THEREOF; VEHICLE LIGHTING DEVICES SPECIALLY ADAPTED FOR VEHICLE EXTERIORS
- F21S41/00—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps
- F21S41/60—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by a variable light distribution
- F21S41/65—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by a variable light distribution by acting on light sources
- F21S41/663—Illuminating devices specially adapted for vehicle exteriors, e.g. headlamps characterised by a variable light distribution by acting on light sources by switching light sources
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/50—Constructional details
- H04N23/54—Mounting of pick-up tubes, electronic image sensors, deviation or focusing coils
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/05—Special features for controlling or switching of the light beam
- B60Q2300/056—Special anti-blinding beams, e.g. a standard beam is chopped or moved in order not to blind
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
- B60Q2300/112—Vehicle speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/10—Indexing codes relating to particular vehicle conditions
- B60Q2300/11—Linear movements of the vehicle
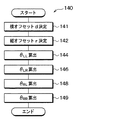
- B60Q2300/114—Vehicle acceleration or deceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/30—Indexing codes relating to the vehicle environment
- B60Q2300/32—Road surface or travel path
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/40—Indexing codes relating to other road users or special conditions
- B60Q2300/41—Indexing codes relating to other road users or special conditions preceding vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60Q—ARRANGEMENT OF SIGNALLING OR LIGHTING DEVICES, THE MOUNTING OR SUPPORTING THEREOF OR CIRCUITS THEREFOR, FOR VEHICLES IN GENERAL
- B60Q2300/00—Indexing codes for automatically adjustable headlamps or automatically dimmable headlamps
- B60Q2300/40—Indexing codes relating to other road users or special conditions
- B60Q2300/42—Indexing codes relating to other road users or special conditions oncoming vehicle
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/57—Mechanical or electrical details of cameras or camera modules specially adapted for being embedded in other devices
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Microelectronics & Electronic Packaging (AREA)
- Optics & Photonics (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Lighting Device Outwards From Vehicle And Optical Signal (AREA)
Abstract
【解決手段】ランプECUは、センサ取付位置Sから見た前方車両の対象光源HLの位置をセンサから取得し、取得した対象光源の位置に基づく目標位置TLを灯具取付位置QLから見た視差補正後方向θLLを、灯具取付位置QLとセンサ取付位置Sとの位置ずれ量D1に基づいて算出し、算出した前記視差補正後方向に基づいて遮光範囲を出力する。
【選択図】図12B
Description
(1)車内の操作部(例えばメカニカルスイッチ)に対して車両内のユーザが行ったビームモードの設定操作の内容
(2)自車両の車速
(3)現在の時刻
(4)自車両の現在の走行地域
等の情報が含まれる。
(L1)ステップ110で取得した自車両の車速が基準速度(例えば時速20km)以下である場合
(L2)ステップ110で取得した現在の時刻が昼間に相当する時間帯(例えば、午前9時以降かつ午後4時以前)内にある場合
(L3)ステップ110で取得した自車両の現在の走行地域が市街地である場合
またステップ120では、上記の条件(L1)、(L2)、(L3)が1つも満たされておらず、かつ、以下の条件(H1)が満たされている場合、ビームモードをHiモードに切り替えると共に、RAM中のマニュアルフラグをオフに設定する。
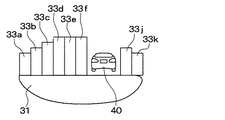
(H1)ステップ110で取得した画像センサ情報が、撮影画像中に1つも物標がないことを示している場合
またステップ120では、上記の条件(L1)、(L2)、(L3)、(H1)が1つも満たされていない場合、ビームモードをS−Hiモードに切り替えると共に、RAM中のマニュアルフラグをオフに設定する。なお、(L1)、(L2)、(L3)、(H1)の条件が1つも満たされていないということは、ステップ110で取得した画像センサ情報が、撮影画像中に1つ以上の物標があることを示していることになる。
XLL=L×tan(θL)+d1−D1
という式で算出され、前方車両が対向車であれば、図12C、図12Dに示す通り、
XLL=L×tan(θL)+d2−D1
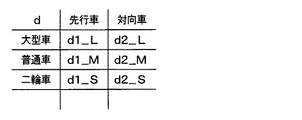
という式で算出される。ここで、d1、d2は、ステップ141で決定した横オフセット量である。また、量Lは、前方車両の自車両側端部(先行車の後端部、対向車の前端部)の、センサ取付位置Sに対する車両前後方向のずれ量に相当する車間距離である。この車間距離Lは、例えば、図示しない車間距離センサ(例えばミリ波レーダ、レーザーレーダ)の検出信号に基づいて特定される。また、θLは、センサ取付位置Sから見た前方車両の左側にある光源HLの水平面内角度であり、直前のステップ110で取得した画像センサ情報中の左座標に基づいて、あらかじめROM内に記録された対応テーブル等を用いて、特定される。
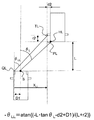
θLL=atan{(L・tanθL+d1−D1)/L}
という式で角度θLLを算出する。この場合、角度θLLは、目標位置TLを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLと同じ位置にある。つまり、ステップ142で算出した縦オフセット量は視差補正に用いられない。このようにするのは、仮に縦オフセット量を視差補正に用いてしまうと前方車両を照射することになり、眩惑を与える危険性があるからである。
−θLL=atan{(−L・tanθL−d1+D1)/(L+r1)}
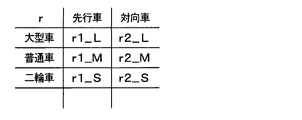
という式で角度θLLを算出する。ここで、量r1は、ステップ142で算出した先行車用の縦オフセット量である。この場合、角度θLLは、目標位置TLを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLから車両前後方向前側に縦オフセット量r1だけずれた位置である。
θLL=atan{(L・tanθL+d2)/L}
という式で角度θLLを算出する。この場合、角度θLLは、左灯具取付位置QLではなくセンサ取付位置Sから目標位置TLを見た方向を示す水平面内角度である。つまり、左灯具取付位置QLとセンサ取付位置Sの位置ずれに応じた視差補正は行われない。なお、この場合は、目標位置TLは基準位置PLと同じ位置にある。
−θLL=atan{(−L・tanθL−d2+D1)/(L+r2)}
という式で角度θLLを算出する。ここで、量r2は、ステップ142で算出した対向車用の縦オフセット量である。この場合、角度θLLは、目標位置TLを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLから車両前後方向前側に縦オフセット量r2だけずれた位置である。
XLR=L×tan(θR)−d1−D1
という式で算出され、前方車両が対向車であれば、図13C、図13Dに示す通り、
XLR=L×tan(θL)−d2−D1
という式で算出される。ここで、θRは、センサ取付位置Sから見た前方車両の右側にある光源HRの水平面内角度であり、直前のステップ110で取得した画像センサ情報中の右座標に基づいて、あらかじめROM内に記録された対応テーブル等を用いて、特定される。
θLR=atan{(L・tanθR−d1−D1)/(L+r1)}
という式で角度θLRを算出する。ここで量r1は、ステップ142で算出した先行車用の縦オフセット量である。この場合、角度θLRは、目標位置TRを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TRは基準位置PRから車両前後方向前側に縦オフセット量r1だけずれた位置である。
−θLR=atan{(−L・tanθR+d1+D1)/L}
という式で角度θLRを算出する。この場合、角度θLRは、目標位置TRを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TRは基準位置PRと同じ位置にある。つまり、ステップ142で算出した縦オフセット量は視差補正に用いられない。
θLR=atan{(L・tanθR−d2−D1)/(L+r2)}
という式で角度θLRを算出する。ここで、量r2は、ステップ142で算出した対向車用の縦オフセット量である。この場合、角度θLRは、目標位置TRを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TRは基準位置PRから車両前後方向前側に縦オフセット量r2だけずれた位置である。
−θLR=atan{(−L・tanθR+d2+D1)/L}
という式で角度θLRを算出する。この場合、角度θLRは、目標位置TRを左灯具取付位置QLから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLと同じ位置にある。
XRL=L×tan(θL)+d1+D2
という式で算出され、前方車両が対向車であれば、図14C、図14Dに示す通り、
XRL=L×tan(θL)+d2+D2
という式で算出される。ここで、D2は、センサ取付位置Sに対する右灯具取付位置QRの車両横方向の位置ずれ量の絶対値である。このずれ量の絶対値D2の値は、ROMに記録されたセンサ取付位置と右灯具取付位置の値に基づいて決定してもよい。あるいは、このずれ量の絶対値D2の値自体がランプECU11のROMに記録されている場合、それを読み出すことで、このずれ量の絶対値D2の値を決定してもよい。
θRL=atan{(L・tanθL+d1+D2)/L}
という式で角度θRLを算出する。この場合、角度θRLは、目標位置TLを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLと同じ位置にある。つまり、ステップ142で算出した縦オフセット量は視差補正に用いられない。
−θRL=atan{(−L・tanθL−d1−D2)/(L+r1)}
という式で角度θRLを算出する。この場合、角度θRLは、目標位置TLを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLから車両前後方向前側に縦オフセット量r1だけずれた位置である。
θRL=atan{(L・tanθL+d2+D2)/L}
という式で角度θRLを算出する。この場合、角度θRLは、目標位置TLを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLと同じ位置にある。
−θRL=atan{(−L・tanθL−d2−D2)/(L+r2)}
という式で角度θRLを算出する。この場合、角度θRLは、目標位置TLを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θLを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TLは基準位置PLから車両前後方向前側に縦オフセット量r2だけずれた位置である。
XRR=L×tan(θR)−d1+D2
という式で算出され、前方車両が対向車であれば、図15C、図15Dに示す通り、
XRR=L×tan(θR)−d2+D2
という式で算出される。ここで、D2は、センサ取付位置Sに対する右灯具取付位置QRの車両横方向の位置ずれ量の絶対値である。
θRR=atan{(L・tanθR−d2+D2)/(L+r2)}
という式で角度θRRを算出する。この場合、角度θRRは、目標位置TRを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TRは基準位置PRから車両前後方向前側に縦オフセット量r1だけずれた位置である。
−θRR=atan{(−L・tanθR+d1−D2)/L}
という式で角度θRRを算出する。この場合、角度θRRは、目標位置TRを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TRは基準位置PRと同じ位置にある。つまり、ステップ142で算出した縦オフセット量は視差補正に用いられない。
θRR=atan{(L・tanθR−d2+D2)/(L+r2)}
という式で角度θRRを算出する。この場合、角度θRRは、目標位置TRを右灯具取付位置QRから見た方向を示す水平面内角度であると共に、角度θRを視差補正した後の視差補正後方向を示す。なお、この場合は、目標位置TRは基準位置PRから車両前後方向前側に縦オフセット量r2だけずれた位置である。
−θRR=atan{(−L・tanθR+d2)/L}
という式で角度θRRを算出する。この場合、角度θRRは、右灯具取付位置QRではなくセンサ取付位置Sから目標位置TRを見た方向を示す水平面内角度である。つまり、右灯具取付位置QRとセンサ取付位置Sの位置ずれに応じた視差補正は行われない。なお、この場合は、目標位置TRは基準位置PRと同じ位置にある。
(a)センサ取付位置Sに対して灯具取付位置が車両横方向の或る側にずれている。
(b)対象光源は、前方車両の2つの光源のうち上記或る側の光源である。
(c)目標位置が、灯具取付位置に対して車両横方向の上記或る側にずれている。
本発明は上記した実施形態に限定されるものではなく、特許請求の範囲に記載した範囲内において適宜変更が可能である。また、また、上記実施形態において、実施形態を構成する要素は、特に必須であると明示した場合および原理的に明らかに必須であると考えられる場合等を除き、必ずしも必須のものではない。また、上記実施形態において、実施形態の構成要素の個数、数値、量、範囲等の数値が言及されている場合、特に必須であると明示した場合および原理的に明らかに特定の数に限定される場合等を除き、その特定の数に限定されるものではない。特に、ある量について複数個の値が例示されている場合、特に別記した場合および原理的に明らかに不可能な場合を除き、それら複数個の値の間の値を採用することも可能である。また、上記実施形態において、構成要素等の形状、位置関係等に言及するときは、特に明示した場合および原理的に特定の形状、位置関係等に限定される場合等を除き、その形状、位置関係等に限定されるものではない。また、本発明は、上記実施形態に対する以下のような変形例も許容される。なお、以下の変形例は、それぞれ独立に、上記実施形態に適用および不適用を選択できる。すなわち、以下の変形例のうち明らかに矛盾する組み合わせを除く任意の組み合わせを、上記実施形態に適用することができる。
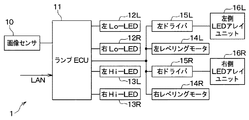
上記実施形態では、ドライバ15L、15Rは、各々の遮光範囲を照らすLEDを消灯するようになっているが、必ずしもこのようになっておらずともよい。例えば、ドライバ15L、15Rは、LEDアレイユニット16L、16Rから取得した命令中の遮光範囲に基づいて、当該遮光範囲を照らすLEDの輝度を、他のLEDよりも低下させるように制御してもよい。このようにすることでも、遮光範囲における前照灯の照射が抑制され、防眩がある程度実現する。
PL、PR 基準位置
TL、TR 目標位置
S センサ取付位置、参照位置
θLL、θLR、θRL、θRR 視差補正後方向
D1、D2 位置ずれ量
10 画像センサ
11 ランプECU
15L、15R ドライバ
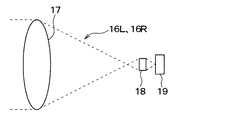
16L、16R LEDアレイユニット
Claims (8)
- 車両の所定の灯具取付位置(QL、QR)に取りつけられた前照灯(16L、16R)を制御する前照灯制御システムであって、
前記車両の所定のセンサ取付位置(S)に取り付けられるセンサ(10)から、前記センサ取付位置から見た前方車両の対象光源(HL、HR)の位置を取得し、取得した前記対象光源の位置に基づく目標位置(TL、TR)を前記灯具取付位置から見た視差補正後方向(θLL、θLR、θRL、θRR)を、前記灯具取付位置と前記センサ取付位置との位置ずれ量(D1、D2)に基づいて算出し、算出した前記視差補正後方向に基づいて、前記灯具取付位置から見た方向範囲であって前記前照灯の照射が抑制されるべき方向範囲を出力する範囲出力部(11)と、
前記範囲出力部が出力した前記方向範囲に基づいて前記前照灯を制御する制御部(15L、15R)とを備えた前照灯制御装置。 - 前記範囲出力部は、前記前方車両が先行車である場合、前記視差補正後方向を前記位置ずれ量に基づいて算出し、算出した前記視差補正後方向に基づいて、前記方向範囲を出力し、
また前記範囲出力部は、前記前方車両が対向車であり、かつ、前記センサ取付位置に対して前記灯具取付位置が前記車両の車両横方向の或る側にずれており、かつ、前記対象光源が前記車両の2つの光源のうち前記或る側の光源であり、かつ、前記灯具取付位置に対して前記目標位置が前記或る側にずれている場合、参照位置(S)から前記目標位置を見た方向に基づいて前記方向範囲を出力し、前記参照位置と前記灯具取付位置とを比べると、前記参照位置の方が前記センサ取付位置に近いことを特徴とする請求項1に記載の前照灯制御装置。 - 前記範囲出力部は、前記対象光源の位置から前記車両横方向外側へのオフセット量としてあらかじめ記憶媒体に記録された横オフセット量(d1、d2)に基づいて、前記目標位置を設定することを特徴とする請求項1または2に記載の前照灯制御装置。
- 前記範囲出力部は、前記横オフセット量を、前記前方車両の種類に応じて切り替えることを特徴とする請求項3に記載の前照灯制御装置。
- 前記範囲出力部は、前記横オフセット量を、前記前方車両が先行車か対向車かに応じて切り替えることを特徴とする請求項3または4に記載の前照灯制御装置。
- 前記範囲出力部は、前記対象光源の位置から前記車両の進行方向前側へのオフセット量としてあらかじめ記憶媒体に記録された縦オフセット量(r1、r2)に基づいて、前記目標位置を設定することを特徴とする請求項1ないし5のいずれか1つに記載の前照灯制御装置。
- 前記範囲出力部は、前記縦オフセット量を、前記前方車両の種類に応じて切り替えることを特徴とする請求項6に記載の前照灯制御装置。
- 前記範囲出力部は、前記縦オフセット量を、前記前方車両が先行車か対向車かに応じて切り替えることを特徴とする請求項6または7に記載の前照灯制御装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015128745A JP6319204B2 (ja) | 2015-06-26 | 2015-06-26 | 車両用の前照灯制御装置 |
| PCT/JP2016/067201 WO2016208408A1 (ja) | 2015-06-26 | 2016-06-09 | 車両用の前照灯制御装置 |
| US15/738,518 US10059252B2 (en) | 2015-06-26 | 2016-06-09 | Vehicle headlight control device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015128745A JP6319204B2 (ja) | 2015-06-26 | 2015-06-26 | 車両用の前照灯制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017013516A true JP2017013516A (ja) | 2017-01-19 |
| JP6319204B2 JP6319204B2 (ja) | 2018-05-09 |
Family
ID=57584932
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015128745A Active JP6319204B2 (ja) | 2015-06-26 | 2015-06-26 | 車両用の前照灯制御装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10059252B2 (ja) |
| JP (1) | JP6319204B2 (ja) |
| WO (1) | WO2016208408A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3517362A1 (en) | 2018-01-24 | 2019-07-31 | Stanley Electric Co., Ltd. | Lighting control device, lighting control method and lighting tool for vehicle |
| WO2023248748A1 (ja) * | 2022-06-23 | 2023-12-28 | スタンレー電気株式会社 | 車両用灯具の制御装置、車両用灯具システム |
| JP7565232B2 (ja) | 2021-02-24 | 2024-10-10 | 日産自動車株式会社 | 車両評価方法及び車両評価装置 |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6458488B2 (ja) * | 2014-12-24 | 2019-01-30 | 株式会社デンソー | 灯具制御システム |
| JP6350402B2 (ja) * | 2015-06-15 | 2018-07-04 | 株式会社デンソー | 車両用前照灯制御装置 |
| CA3038476A1 (en) * | 2016-09-26 | 2018-03-29 | Nissan Motor Co., Ltd. | Route setting method and route setting device |
| KR102690404B1 (ko) * | 2016-12-20 | 2024-08-01 | 현대자동차주식회사 | 차량 및 그 제어방법 |
| KR102614146B1 (ko) * | 2018-09-27 | 2023-12-14 | 현대자동차주식회사 | 차량용 조명장치 |
| DE112020002336T5 (de) * | 2019-06-12 | 2022-02-24 | Hitachi Astemo, Ltd. | Fahrzeuginternes System und fahrzeuginterne Vorrichtung |
| CN110979161A (zh) * | 2019-12-30 | 2020-04-10 | 北京海纳川汽车部件股份有限公司 | 车灯的控制方法、系统及车辆 |
| CN111123254A (zh) * | 2019-12-30 | 2020-05-08 | 北京海纳川汽车部件股份有限公司 | 车灯的控制方法、系统及车辆 |
| EP4394243A1 (de) * | 2022-12-28 | 2024-07-03 | ZKW Group GmbH | Leuchtmodul für eine kraftfahrzeugleuchte und verfahren zum betreiben eines solchen leuchtmoduls |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009112125A1 (de) * | 2008-03-14 | 2009-09-17 | Daimler Ag | Verfahren zur fahrlichtsteuerung eines fahrzeugs |
| JP2012126200A (ja) * | 2010-12-14 | 2012-07-05 | Stanley Electric Co Ltd | 配光制御システム及び配光制御装置 |
| JP2012187950A (ja) * | 2011-03-09 | 2012-10-04 | Stanley Electric Co Ltd | 配光制御システム |
| JP2012530634A (ja) * | 2009-05-25 | 2012-12-06 | ヴァレオ ビジョン | 自動車のヘッドライトを調節する方法 |
| JP2013079044A (ja) * | 2011-10-05 | 2013-05-02 | Stanley Electric Co Ltd | 車両用灯具の配光制御装置、車両用灯具の配光制御システム |
| JP2015016775A (ja) * | 2013-07-11 | 2015-01-29 | 株式会社小糸製作所 | 車両用前照灯の配光制御装置 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4720764B2 (ja) | 2006-11-16 | 2011-07-13 | 株式会社デンソー | 前照灯制御装置 |
| JP4458141B2 (ja) * | 2007-09-27 | 2010-04-28 | 株式会社デンソー | ライト制御装置 |
| EP2636946B1 (en) | 2012-03-08 | 2019-05-08 | Stanley Electric Co., Ltd. | Headlight controller |
| JP5976345B2 (ja) | 2012-03-08 | 2016-08-23 | スタンレー電気株式会社 | 車両用前照灯の点灯制御装置及び車両用前照灯システム |
| JP5768756B2 (ja) | 2012-04-17 | 2015-08-26 | 株式会社デンソー | 車両のヘッドランプの配光制御装置 |
| MY158602A (en) * | 2012-07-27 | 2016-10-18 | Nissan Motor | Three-dimensional object detection device, and three-dimensional object detection method |
| US9550448B2 (en) | 2013-07-11 | 2017-01-24 | Koito Manufacturing Co., Ltd. | Light distribution control method and light distribution control device for a vehicular headlamp |
-
2015
- 2015-06-26 JP JP2015128745A patent/JP6319204B2/ja active Active
-
2016
- 2016-06-09 US US15/738,518 patent/US10059252B2/en active Active
- 2016-06-09 WO PCT/JP2016/067201 patent/WO2016208408A1/ja active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2009112125A1 (de) * | 2008-03-14 | 2009-09-17 | Daimler Ag | Verfahren zur fahrlichtsteuerung eines fahrzeugs |
| JP2012530634A (ja) * | 2009-05-25 | 2012-12-06 | ヴァレオ ビジョン | 自動車のヘッドライトを調節する方法 |
| JP2012126200A (ja) * | 2010-12-14 | 2012-07-05 | Stanley Electric Co Ltd | 配光制御システム及び配光制御装置 |
| JP2012187950A (ja) * | 2011-03-09 | 2012-10-04 | Stanley Electric Co Ltd | 配光制御システム |
| JP2013079044A (ja) * | 2011-10-05 | 2013-05-02 | Stanley Electric Co Ltd | 車両用灯具の配光制御装置、車両用灯具の配光制御システム |
| JP2015016775A (ja) * | 2013-07-11 | 2015-01-29 | 株式会社小糸製作所 | 車両用前照灯の配光制御装置 |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3517362A1 (en) | 2018-01-24 | 2019-07-31 | Stanley Electric Co., Ltd. | Lighting control device, lighting control method and lighting tool for vehicle |
| US10654402B2 (en) | 2018-01-24 | 2020-05-19 | Stanley Electric Co., Ltd. | Lighting control device, lighting control method and lighting tool for vehicle |
| JP7565232B2 (ja) | 2021-02-24 | 2024-10-10 | 日産自動車株式会社 | 車両評価方法及び車両評価装置 |
| WO2023248748A1 (ja) * | 2022-06-23 | 2023-12-28 | スタンレー電気株式会社 | 車両用灯具の制御装置、車両用灯具システム |
Also Published As
| Publication number | Publication date |
|---|---|
| US10059252B2 (en) | 2018-08-28 |
| WO2016208408A1 (ja) | 2016-12-29 |
| JP6319204B2 (ja) | 2018-05-09 |
| US20180170241A1 (en) | 2018-06-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6319204B2 (ja) | 車両用の前照灯制御装置 | |
| JP6350402B2 (ja) | 車両用前照灯制御装置 | |
| JP6453669B2 (ja) | 車両用前照灯制御装置 | |
| US7575348B2 (en) | Vehicle headlamp device | |
| EP1970249A2 (en) | Vehicle operation support method and system | |
| US9783096B2 (en) | Automotive lamp and method of controlling the same | |
| US9193297B2 (en) | Vehicle light distribution control device and vehicle light distribution control method | |
| JP2015033944A (ja) | 車両用前照灯の点灯制御装置、車両用前照灯システム | |
| JP2016168915A (ja) | 車両灯具システム | |
| US20140246975A1 (en) | Vehicle headlamp control system | |
| US20130051041A1 (en) | Method and device for adjusting a light emission of at least one headlight of a vehicle | |
| CN110834580B (zh) | 前照灯的配光控制系统,配光控制装置,配光控制方法 | |
| WO2015159589A1 (ja) | 車両用前照灯の制御装置 | |
| US20190077304A1 (en) | Control device for vehicle headlight | |
| JP2013032121A (ja) | 前照灯制御装置 | |
| WO2016021154A1 (ja) | 照明装置と、それを搭載した自動車 | |
| CN114179712B (zh) | 车辆前照灯控制方法、电子设备及存储介质 | |
| WO2019049986A1 (ja) | 車両の前照灯の制御装置 | |
| JP6370534B2 (ja) | 車両用前照灯の配光制御装置 | |
| JP7055563B2 (ja) | 配光制御装置 | |
| WO2017163414A1 (ja) | 配光制御装置、配光制御方法及び配光制御プログラム | |
| JP2020026245A (ja) | 車両用灯具、車両用灯具の制御システム及び車両用灯具の制御方法 | |
| JP7103865B2 (ja) | 車両用前照灯装置及び車両用前照灯の制御方法 | |
| KR20140085859A (ko) | 자동차 | |
| JP2006160038A (ja) | 車両用照明装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171219 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180216 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180306 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180319 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6319204 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |