JP2017008501A - 作業機械 - Google Patents
作業機械 Download PDFInfo
- Publication number
- JP2017008501A JP2017008501A JP2015122306A JP2015122306A JP2017008501A JP 2017008501 A JP2017008501 A JP 2017008501A JP 2015122306 A JP2015122306 A JP 2015122306A JP 2015122306 A JP2015122306 A JP 2015122306A JP 2017008501 A JP2017008501 A JP 2017008501A
- Authority
- JP
- Japan
- Prior art keywords
- pressure
- valve
- unit
- stop
- pilot pressure
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000012937 correction Methods 0.000 claims description 104
- 238000004364 calculation method Methods 0.000 claims description 75
- 230000008859 change Effects 0.000 claims description 40
- 230000004044 response Effects 0.000 claims description 4
- 239000003638 chemical reducing agent Substances 0.000 claims 1
- 230000000087 stabilizing effect Effects 0.000 abstract 2
- 239000003921 oil Substances 0.000 description 231
- 230000009467 reduction Effects 0.000 description 66
- 230000006641 stabilisation Effects 0.000 description 56
- 238000011105 stabilization Methods 0.000 description 56
- 238000000034 method Methods 0.000 description 40
- 239000010720 hydraulic oil Substances 0.000 description 25
- 230000006399 behavior Effects 0.000 description 24
- 238000001514 detection method Methods 0.000 description 22
- 230000007423 decrease Effects 0.000 description 15
- 238000010586 diagram Methods 0.000 description 13
- 230000036544 posture Effects 0.000 description 11
- 230000001133 acceleration Effects 0.000 description 10
- 238000011156 evaluation Methods 0.000 description 8
- 230000005484 gravity Effects 0.000 description 7
- 230000008569 process Effects 0.000 description 6
- 230000009471 action Effects 0.000 description 4
- 238000010276 construction Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000012545 processing Methods 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000003247 decreasing effect Effects 0.000 description 3
- 230000007246 mechanism Effects 0.000 description 2
- 230000004043 responsiveness Effects 0.000 description 2
- 239000002699 waste material Substances 0.000 description 2
- 230000008602 contraction Effects 0.000 description 1
- 238000005516 engineering process Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 230000005281 excited state Effects 0.000 description 1
- 239000012530 fluid Substances 0.000 description 1
- 230000001771 impaired effect Effects 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
Images










Classifications
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/36—Component parts
- E02F3/42—Drives for dippers, buckets, dipper-arms or bucket-arms
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2225—Control of flow rate; Load sensing arrangements using pressure-compensating valves
- E02F9/2228—Control of flow rate; Load sensing arrangements using pressure-compensating valves including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/28—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets
- E02F3/30—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom
- E02F3/32—Dredgers; Soil-shifting machines mechanically-driven with digging tools mounted on a dipper- or bucket-arm, i.e. there is either one arm or a pair of arms, e.g. dippers, buckets with a dipper-arm pivoted on a cantilever beam, i.e. boom working downwardly and towards the machine, e.g. with backhoes
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2203—Arrangements for controlling the attitude of actuators, e.g. speed, floating function
- E02F9/2207—Arrangements for controlling the attitude of actuators, e.g. speed, floating function for reducing or compensating oscillations
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2253—Controlling the travelling speed of vehicles, e.g. adjusting travelling speed according to implement loads, control of hydrostatic transmission
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2267—Valves or distributors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2264—Arrangements or adaptations of elements for hydraulic drives
- E02F9/2271—Actuators and supports therefor and protection therefor
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
- E02F9/267—Diagnosing or detecting failure of vehicles
- E02F9/268—Diagnosing or detecting failure of vehicles with failure correction follow-up actions
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B13/00—Details of servomotor systems ; Valves for servomotor systems
- F15B13/02—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors
- F15B13/06—Fluid distribution or supply devices characterised by their adaptation to the control of servomotors for use with two or more servomotors
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F3/00—Dredgers; Soil-shifting machines
- E02F3/04—Dredgers; Soil-shifting machines mechanically-driven
- E02F3/96—Dredgers; Soil-shifting machines mechanically-driven with arrangements for alternate or simultaneous use of different digging elements
- E02F3/963—Arrangements on backhoes for alternate use of different tools
- E02F3/964—Arrangements on backhoes for alternate use of different tools of several tools mounted on one machine
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/50—Pressure control
- F15B2211/575—Pilot pressure control
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Operation Control Of Excavators (AREA)
- Architecture (AREA)
- Fluid-Pressure Circuits (AREA)
- Chemical & Material Sciences (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electrochemistry (AREA)
Abstract
【解決手段】作業機械の安定状態に応じて駆動アクチュエータを緩やかに停止させる緩停止指令および上限動作速度を制限する動作速度制限指令を演算・出力する安定化制御演算部60aと、操作レバーの停止操作時に駆動アクチュエータを緩やかに停止させるようにパイロット圧を補正する停止特性変更部210と、駆動アクチュエータの動作速度を制限するようにパイロット圧を補正する動作速度制限部240とを有し、安定化制御演算部60aから緩停止指令および動作速度制限指令が入力された場合は比例減圧弁から出力されるパイロット圧を補正し、緩停止指令および動作速度制限指令が入力されない場合は比例減圧弁から出力されるパイロット圧を補正することなく流量制御弁に供給する。
【選択図】図3
Description
本発明は、上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、作業機械本体と、この作業機械本体に対して上下方向に揺動自在に取り付けられ複数の可動部を有する作業フロントと、この作業フロントの各可動部を駆動する駆動アクチュエータと、この駆動アクチュエータの駆動を制御する制御演算を行う演算装置と、前記駆動アクチュエータへの圧油の供給を制御する流量制御弁および操作レバーの操作に基づいて前記流量制御弁に供給するパイロット圧油を出力する比例減圧弁を有するアクチュエータ駆動油圧回路とを備えた作業機械において、前記演算装置は、作業機械の速度を推定する速度推定部と、前記速度推定部によって推定された速度と作業機械の姿勢に基づき、作業機械が急停止すると仮定した場合の作業機械の挙動を予測する急停止時挙動予測部と、前記急停止時挙動予測部によって予測された挙動に基づき前記作業機械の安定性を判定する安定性判定部と、前記安定性判定部の判定結果に基づき前記駆動アクチュエータの減速度を制限して前記駆動アクチュエータを緩やかに停止させる緩停止指令および前記駆動アクチュエータの上限動作速度を制限する動作速度制限指令を演算し、出力する動作制限決定部とを有し、前記アクチュエータ駆動油圧回路は、前記動作制限決定部からの前記緩停止指令および前記動作速度制限指令に応じて前記比例減圧弁から出力されるパイロット圧を補正するパイロット圧補正部を有し、このパイロット圧補正部は、前記操作レバーの停止操作時に前記駆動アクチュエータを緩やかに停止させるようにパイロット圧を補正する停止特性変更部と、前記駆動アクチュエータの動作速度を制限するようにパイロット圧を補正する動作速度制限部とから構成され、前記停止特性変更部および前記動作速度制限部は、前記動作制限決定部からの前記緩停止指令および前記動作速度制限指令によってそれぞれ駆動され、前記動作制限決定部から前記緩停止指令および前記動作速度制限指令が入力された場合は前記比例減圧弁から出力されるパイロット圧を補正し、前記動作制限決定部から前記緩停止指令および前記動作速度制限指令が入力されない場合には、前記比例減圧弁から出力されるパイロット圧を補正することなく前記流量制御弁に供給することを特徴とする。
本発明の作業機械の第1の実施形態を、図1乃至図9Bを用いて説明する。
図1に示すように、本実施形態に係る作業機械1は、走行体2と、走行体2の上部に旋回可能に取り付けられた旋回体3と、一端が旋回体3に連結された多関節型のリンク機構よりなる作業フロント6とを備えている。
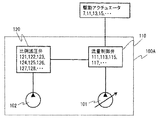
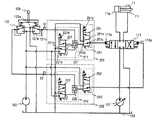
図2Aに油圧パイロット式操作装置を有する一般的な作業機械における駆動アクチュエータの駆動油圧回路の概念図を示す。
本実施形態に係る作業機械1には、作業中の不安定化を防ぐ安定化制御装置190が搭載されている。作業機械1では、オペレータが操作レバー50を操作することにより、種々の作業が行われるが、作業フロント6を伸ばした姿勢で作業を行う場合やアタッチメント23に加わる負荷が大きい場合には安定性が低下する。また、急操作を行った場合には、急激な速度変化に伴って大きな慣性力が作用し、その影響により、作業機械1の安定性が大きく変化する。特に、操作レバー50を操作状態から瞬時に停止指令状態に戻すような急停止操作時には、転倒方向に大きな慣性力が働き、作業機械1が不安定になりやすい。
作業機械1の主要部分には、状態量検出部30として、機械の状態量を検出するセンサが備えられる。以下、本実施形態に係る作業機械1に備えられる状態量検出部30の詳細について、図1および図3を参照して説明する。
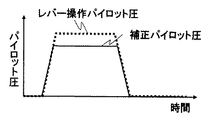
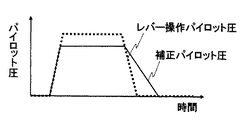
パイロット圧補正部200は、オペレータのレバー操作に応じて比例減圧弁群から出力されるパイロット圧油の圧力を、後述する演算装置60内の安定化制御演算部60aから指令される動作制限を満たす圧力に補正する機能ブロックである。本実施形態の安定化制御装置190では、安定化のための動作制限として、停止特性を変更して緩やかに停止させる緩停止と、動作速度に上限を設ける動作速度制限を行う。パイロット圧補正部200は、この2種類の動作制限を行うために、停止特性変更部210と動作速度制限部240とを備えている。
本実施形態のブーム伸長停止特性変更部211は、上述したように緩停止用電磁比例弁221と緩停止用高圧選択部231とから構成される。
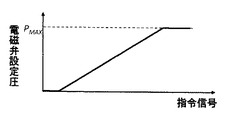
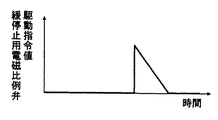
本実施形態では、上述したように、ブーム伸長動作速度制限部241として速度制限用電磁比例弁251を備えている。速度制限用電磁比例弁251は、ブーム流量制御弁111に供給されるパイロット圧油に対し、演算装置60内の安定化制御演算部60aによって指令された動作速度制限を満たすように上限圧を設定する。
演算装置60は図示しないCPU、ROM(Read Only Memory)、RAM(Random Access Memory)、およびフラッシュメモリ等からなる記憶部、およびこれらを備えているマイクロコンビュータ並びに図示しない周辺回路などから構成され、例えばROMに格納されるプログラムにしたがって作動する。
以下、図3を参照して演算部60zの詳細を説明する。
前述のように、本実施形態の安定化制御装置190では、作業機械1を安定に保つための動作制限として、緩停止と動作速度制限を行う。安定化制御演算部60aは、状態量検出部30の検出結果に基づいて作業機械1の安定性を評価し、この安定性評価結果に基づいて動作制限の要否を判定し、動作制限が必要な場合には緩停止指令値および動作速度制限値を出力する。
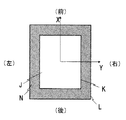
安定化制御演算部60aの各機能ブロックの詳細を説明する前に、本実施形態において作業機械1の安定性の評価に用いるZMPと、ZMPを用いた安定性判定方法(ZMP安定判別規範)について説明する。なお、ZMPの概念ならびにZMP安定判別規範については「LEGGED LOCOMOTION ROBOTS:Miomir Vukobratovic著(「歩行ロボットと人工の足:加藤一郎訳,日刊工業新聞社」)により詳しく記載されている。

mi:i番目の質点の質量
ri:i番目の質点の位置ベクトル
r”i:i番目の質点に加わる加速度ベクトル(重力加速度含む)
Mj:j番目の外力モーメント
sk:k番目の外力作用点位置ベクトル
Fk:k番目の外力ベクトル
なお、各ベクトルはX成分、Y成分、Z成分で構成される3次元ベクトルである。
速度推定部60bでは、状態量検出部30の検出結果をもとに、現在のレバー操作によって生じる各駆動アクチュエータの動作速度を推定する。一般に、作業機械1の各駆動アクチュエータの動作速度は、作業状況や負荷状態によって変化するものの、対応する操作レバー50の操作量、すなわちレバー操作パイロット圧に概ね比例して変化する。操作レバー50の操作と動作速度との間には油圧および機構による遅れが存在するため、レバー操作情報を用いることによって近未来の動作速度を予測することができる。そこで、速度推定部60bでは、過去のレバー操作パイロット圧と現在のレバー操作パイロット圧と現在の動作速度を用いて近未来の動作速度を予測する。
TL秒前のレバー操作パイロット圧Plev(t−TL)と現在の速度V(t)より以下の式(2)を用いて比例係数αvを算出する。
算出した比例係数αvと現在のレバー操作パイロット圧Plev(t)より以下の式(3)を用いてTL秒後の速度の推定値v(t+TL)を算出する。
急停止時挙動予測部60cでは、急停止指令が行われると仮定し、急停止指令時の作業機械1の挙動を予測する。現在の姿勢情報と速度推定部60bの速度推定結果と急停止モデルとから、急停止指令が行われてから駆動アクチュエータが完全に停止するまでの位置軌跡、速度軌跡、加速度軌跡を算出する。急停止モデルとしては、例えば、急停止時の速度軌跡をモデル化し、その速度軌跡から位置軌跡および加速度軌跡を算出する方法が考えられる。あらかじめ急停止指令時の速度軌跡をモデル化し、時刻tにおいて急停止指令が行われたときの時刻(操作レバー開放時刻)からte秒後のシリンダ速度をVstop(t,te)として与えたとき、te秒後のシリンダ長lstop(t,te)とシリンダ加速度astop(t,te)は、急停止開始時のシリンダ、長lstop(t,0)を用いて以下の式(4)で算出できる。
動作制限決定部60hでは、安定性判定部60dの判定結果を元に動作制限の要否を判定し、動作制限指令を算出する。本実施形態の安定化制御装置190では、作業機械1を安定に保つために緩停止と動作速度制限を行う。したがって、動作制限決定部60hは、動作制限指令として緩停止指令と動作速度制限指令を算出し、指令値生成部60iに出力する。
指令値生成部60iは、安定化制御演算部60aから出力された緩停止指令および動作速度制限指令に基づいて、パイロット圧補正部200の駆動指令値を生成し、演算装置60の出力部60yに出力する。
以上で説明したように、本実施形態によれば、作業機械1に対して無理な操作や誤った操作を行った場合にも、作業機械1を安定に保つために必要な動作制限が行われ、安定性を損なうことなく、作業を継続させることができる。また、本実施形態では、動作制限が必要な場合のみ、パイロット圧補正部200における補正を行い、動作制限の必要のない場合には従来と同様に比例減圧弁群から出力されるパイロット圧油を用いて駆動アクチュエータを駆動する構成を有しており、従来の操作性を損なうことなく、動作制限を行うことができる。したがって、本実施形態の安定化制御装置190により、操作性および安定性の高い作業機械を提供することができる。
<センサ構成>
上記の実施形態では、姿勢検出部49として作業機械1の傾きを検出するための姿勢センサ3bを設ける例を示したが、作業中に作業機械1の傾きが変化しない場合には、作業機械1の傾きを一定値とし、姿勢センサ3bを設けない構成としても良い。
上記の実施形態では、ブームシリンダ11、およびアームシリンダ13に対して動作制限を行う場合を例にとって説明したが、ブームシリンダ11、アームシリンダ13に加えて、旋回モータ7やアタッチメントシリンダ、15に対して動作制限を行うように構成しても良い。
以下では、パイロット圧補正部の変更例について、ブーム伸長パイロット圧油の補正を例にとって説明する。
上記の実施形態では、指令値生成部60iにおいて、レバー操作パイロット圧が指令された停止特性よりも急激に低下する場合のみ、緩停止用電磁比例弁221へ駆動指令を行う例を示した。そして、上記の例では、レバー操作パイロット圧が低下しない場合や、指令された停止特性よりも緩やかに低下する場合には指令信号を零とした。
上記の実施形態では、動作制限決定部60hにおいて動作速度制限ゲインを算出し、指令値生成部60iにおいて、動作速度制限ゲインとレバー操作パイロット圧とを用いて速度制限用電磁比例弁251の駆動指令値を算出する例を示した。このような構成とすることにより、パイロット圧と動作速度との関係が作業状態によって変化する場合においても、適切に動作速度制限を行うことができる。
本発明の作業機械の第2の実施形態を図10を用いて説明する。
本実施形態のパイロット圧補正部200は、第1の実施形態と同様、停止特性変更部210と動作速度制限部240とから構成される。安定化制御演算に基づく動作制限をブームシリンダ11およびアームシリンダ13に対して適用するために、作業機械1には、パイロット圧補正部200として、ブーム伸長パイロット圧補正部201、ブーム縮小パイロット圧補正部202、アーム伸長パイロット圧補正部(図示せず)、アーム縮小パイロット圧補正部(図示せず)が設けられる。各パイロット圧補正部201,202の構成はいずれについても同様の構成であり、ブーム伸長パイロット圧補正部201はブーム伸長停止特性変更部211とブーム伸長動作速度制限部241を備え、ブーム縮小パイロット圧補正部202はブーム縮小停止特性変更部212とブーム縮小動作速度制限部242を備えている。図示しないアーム伸長パイロット圧補正部も同様にアーム伸長停止特性変更部とアーム伸長動作速度制限部を備え、アーム縮小パイロット圧補正部もアーム縮小停止特性変更部とアーム縮小動作速度制限部を備えている。本実施形態の各動作速度制限部241,242…の構成は第1の実施形態と同様である。以下では、ブーム伸長パイロット圧油の補正を例にとり、ブーム伸長停止特性変更部211についてのみ説明する。
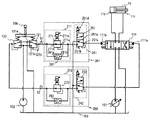
本実施形態のブーム伸長停止特性変更部211は、電磁比例圧力保持弁群としての緩停止用電磁比例圧力保持弁271と逆止弁群としての緩停止用逆止弁281とから構成される。
演算装置60は、第1の実施形態と同様に、作業機械1の各部に取り付けられた各センサからの信号が入力される入力部60x、入力部60xに入力される信号を受けて所定の演算を行う演算部60z、演算部60zからの出力信号を受けてパイロット圧補正部200への駆動指令を出力する出力部60yを備えている。演算部60zは、作業機械1を安定に保つための動作制限を算出する安定化制御演算部60aと、パイロット圧補正部200への駆動指令を算出する指令値生成部60iとから構成される。
本実施形態のブーム伸長停止特性変更部211は、緩停止用逆止弁281と緩停止用電磁比例圧力保持弁271とから構成されており、停止特性変更部211の出力するパイロット圧油が動作制限決定部60hから出力された緩停止指令を満たす圧力となるように、緩停止用電磁比例圧力保持弁271を駆動することにより、駆動アクチュエータを緩やかに停止させる。
本実施形態のような態様の停止特性変更部211を用いると、定常的な動作指令操作時や増速操作時等、レバー操作パイロット圧を低下させないような操作時には、レバーパイロット圧油は緩停止用逆止弁281を備えた油路を流通し、補正されることなく出力される。また、安定化制御演算部60aにより指令された緩停止の停止特性よりも緩やかに停止させるような操作が行われた場合にも、緩停止用電磁比例圧力保持弁271による補正は行われない。
本発明の作業機械の第3の実施形態を図11を用いて説明する。
本実施形態のパイロット圧補正部200は、第1および第2の実施形態と同様、停止特性変更部210と動作速度制限部240とから構成される。作業機械1には、パイロット圧補正部200として、ブーム伸長パイロット圧補正部201、ブーム縮小パイロット圧補正部202、アーム伸長パイロット圧補正部(図示せず)、アーム縮小パイロット圧補正部(図示せず)が設けられる。各パイロット圧補正部201,202の構成はいずれについても同様の構成であり、ブーム伸長パイロット圧補正部201はブーム伸長停止特性変更部211とブーム伸長動作速度制限部241を備え、ブーム縮小パイロット圧補正部202はブーム縮小停止特性変更部212とブーム縮小動作速度制限部242を備えている。図示しないアーム伸長パイロット圧補正部はアーム伸長停止特性変更部とアーム伸長動作速度制限部を備え、アーム縮小パイロット圧補正部もアーム縮小停止特性変更部とアーム縮小動作速度制限部を備えている。本実施形態の各動作速度制限部241,242…は第1の実施形態と同様である。以下では、ブーム伸長パイロット圧油の補正を例にとり、ブーム伸長停止特性変更部211についてのみ説明する。
本実施形態のブーム伸長停止特性変更部211は、緩停止用逆止弁281と緩停止用電磁比例流量制御弁291とから構成される。緩停止用逆止弁281は、圧油の流れ方向を制限する弁であり、緩停止用電磁比例流量制御弁291は、パイロット油路の圧油の作動油タンク103への排出を制御する弁である。
演算装置60は、第1および第2の実施形態と同様に、作業機械1の各部に取り付けられた各センサからの信号が入力される入力部60x、入力部60xに入力される信号を受けて所定の演算を行う演算部60z、演算部60zからの出力信号を受けて、パイロット圧補正部200への駆動指令を出力する出力部60yを備えている。演算部60zは、作業機械1を安定に保つための動作制限を算出する安定化制御演算部60aと、パイロット圧補正部200への駆動指令を算出する指令値生成部60iとから構成される。
本実施形態のブーム伸長停止特性変更部211は、緩停止用逆止弁281と緩停止用電磁比例流量制御弁291とから構成されており、緩停止用電磁比例流量制御弁291の内部に設けられた絞り291dの開度を適切に調整することによって、駆動アクチュエータの停止特性を所望の特性へ変更する。
本実施形態の停止特性変更部211を用いると、定常的な動作指令操作時や増速操作時等、レバー操作パイロット圧を低下させないような操作時には、レバーパイロット圧油は緩停止用逆止弁281を備えた油路を流通し、補正されることなく出力される。また、安定化制御演算部60aにより指令された緩停止の停止特性よりも緩やかに停止するような操作が行われた場合には、緩停止用電磁比例流量制御弁291の絞り291dによる流量制限の影響を受けず、レバー操作パイロット圧油は補正されない。
なお、本発明は、上記の実施形態に限定されるものではなく、様々な変形例が含まれる。上記の実施形態は本発明を分かりやすく説明するために詳細に説明したものであり、必ずしも説明した全ての構成を備えているものに限定されるものではない。また、ある実施形態の構成の一部を他の実施形態の構成に置き換えることも可能であり、また、ある実施形態の構成に他の実施形態の構成を加えることも可能である。また、各実施形態の構成の一部について、他の構成の追加・削除・置換をすることも可能である。
6…作業フロント
7…旋回モータ(駆動アクチュエータ)
11…ブームシリンダ(駆動アクチュエータ)
13…アームシリンダ(駆動アクチュエータ)
15…アタッチメントシリンダ(駆動アクチュエータ)
50…操作レバー
60…演算装置
60b…速度推定部
60c…急停止時挙動予測部
60d…安定性判定部
60h…動作制限決定部
100…アクチュエータ駆動油圧回路
111…ブーム流量制御弁(流量制御弁)
121…ブーム伸長比例減圧弁
122…ブーム縮小比例減圧弁
200…パイロット圧補正部
210…停止特性変更部
240…動作速度制限部
Claims (7)
- 作業機械本体と、この作業機械本体に対して上下方向に揺動自在に取り付けられ複数の可動部を有する作業フロントと、この作業フロントの各可動部を駆動する駆動アクチュエータと、この駆動アクチュエータの駆動を制御する制御演算を行う演算装置と、前記駆動アクチュエータへの圧油の供給を制御する流量制御弁および操作レバーの操作に基づいて前記流量制御弁に供給するパイロット圧油を出力する比例減圧弁を有するアクチュエータ駆動油圧回路とを備えた作業機械において、
前記演算装置は、作業機械の速度を推定する速度推定部と、前記速度推定部によって推定された速度と作業機械の姿勢に基づき、作業機械が急停止すると仮定した場合の作業機械の挙動を予測する急停止時挙動予測部と、前記急停止時挙動予測部によって予測された挙動に基づき前記作業機械の安定性を判定する安定性判定部と、前記安定性判定部の判定結果に基づき前記駆動アクチュエータの減速度を制限して前記駆動アクチュエータを緩やかに停止させる緩停止指令および前記駆動アクチュエータの上限動作速度を制限する動作速度制限指令を演算し、出力する動作制限決定部とを有し、
前記アクチュエータ駆動油圧回路は、前記動作制限決定部からの前記緩停止指令および前記動作速度制限指令に応じて前記比例減圧弁から出力されるパイロット圧を補正するパイロット圧補正部を有し、
このパイロット圧補正部は、前記操作レバーの停止操作時に前記駆動アクチュエータを緩やかに停止させるようにパイロット圧を補正する停止特性変更部と、前記駆動アクチュエータの動作速度を制限するようにパイロット圧を補正する動作速度制限部とから構成され、
前記停止特性変更部および前記動作速度制限部は、前記動作制限決定部からの前記緩停止指令および前記動作速度制限指令によってそれぞれ駆動され、前記動作制限決定部から前記緩停止指令および前記動作速度制限指令が入力された場合は前記比例減圧弁から出力されるパイロット圧を補正し、前記動作制限決定部から前記緩停止指令および前記動作速度制限指令が入力されない場合には、前記比例減圧弁から出力されるパイロット圧を補正することなく前記流量制御弁に供給する
ことを特徴とする作業機械。 - 請求項1に記載の作業機械において、
前記停止特性変更部は、前記動作制限決定部から出力される前記緩停止指令の停止特性よりも速やかに停止させる操作が行われた場合に、前記比例減圧弁から出力されるパイロット圧よりも高い圧力を生成して出力する弁装置であり、
前記動作速度制限部は、前記パイロット圧が前記動作制限決定部から出力される動作速度制限を満たすための上限圧よりも高い場合に、前記パイロット圧を前記上限圧まで減圧する弁装置である
ことを特徴とする作業機械。 - 請求項1に記載の作業機械において、
前記動作速度制限部は、電磁比例弁もしくは電磁比例リリーフ弁のいずれかを有する
ことを特徴とする作業機械。 - 請求項1に記載の作業機械において、
前記停止特性変更部は、電磁比例弁と高圧選択部とから構成され、
前記電磁比例弁は、前記比例減圧弁以外のパイロット圧油供給部と接続されており、前記動作制限決定部から指令される設定圧のパイロット圧を生成し、
前記高圧選択部は、前記比例減圧弁から出力されるパイロット圧と前記電磁比例弁から出力されるパイロット圧とのうち高圧側のパイロット圧を選択して出力する
ことを特徴とする作業機械。 - 請求項1に記載の作業機械において、
前記停止特性変更部は、逆止弁と電磁比例圧油排出制御弁とから構成され、
前記逆止弁および前記電磁比例圧油排出制御弁は、前記比例減圧弁と前記流量制御弁とを接続するパイロット油路に並列に設けられており、
前記逆止弁は、前記比例減圧弁から前記流量制御弁への圧油の流通を自由流れと、前記流量制御弁から前記比例減圧弁への圧油の流通を遮断とし、
前記電磁比例圧油排出制御弁は、前記演算装置からの指令信号に基づいて前記流量制御弁から前記比例減圧弁への圧油の流通を制御する
ことを特徴とする作業機械。 - 請求項5に記載の作業機械において、
前記電磁比例圧油排出制御弁は、前記流量制御弁に供給されるパイロット圧が前記演算装置からの指令信号によって設定される保持圧よりも低い場合には圧油の流通を遮断し、高い場合には圧油の流通を可能とする電磁比例圧力保持弁を有する
ことを特徴とする作業機械。 - 請求項5に記載の作業機械において、
前記電磁比例圧油排出制御弁は、前記演算装置からの指令信号によって開度を変更可能な絞りを有する電磁比例流量制御弁を有し、
前記演算装置は、前記動作制限決定部から出力される緩停止指令に基づいて前記電磁比例流量制御弁の絞り開度を決定する
ことを特徴とする作業機械。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122306A JP6619163B2 (ja) | 2015-06-17 | 2015-06-17 | 作業機械 |
| CN201610101989.4A CN106256966B (zh) | 2015-06-17 | 2016-02-24 | 作业机械 |
| KR1020160021711A KR101814657B1 (ko) | 2015-06-17 | 2016-02-24 | 작업 기계 |
| US15/183,132 US10024032B2 (en) | 2015-06-17 | 2016-06-15 | Work machine |
| EP16174832.2A EP3106572B1 (en) | 2015-06-17 | 2016-06-16 | Work machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015122306A JP6619163B2 (ja) | 2015-06-17 | 2015-06-17 | 作業機械 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2017008501A true JP2017008501A (ja) | 2017-01-12 |
| JP2017008501A5 JP2017008501A5 (ja) | 2018-04-19 |
| JP6619163B2 JP6619163B2 (ja) | 2019-12-11 |
Family
ID=56132871
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015122306A Expired - Fee Related JP6619163B2 (ja) | 2015-06-17 | 2015-06-17 | 作業機械 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10024032B2 (ja) |
| EP (1) | EP3106572B1 (ja) |
| JP (1) | JP6619163B2 (ja) |
| KR (1) | KR101814657B1 (ja) |
| CN (1) | CN106256966B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018145753A (ja) * | 2017-03-09 | 2018-09-20 | 日立建機株式会社 | 作業機械の操作支援装置 |
| WO2019053936A1 (ja) * | 2017-09-15 | 2019-03-21 | 日立建機株式会社 | 作業機械 |
| WO2019186840A1 (ja) * | 2018-03-28 | 2019-10-03 | 日立建機株式会社 | 作業機械 |
| WO2021059584A1 (ja) * | 2019-09-26 | 2021-04-01 | 日立建機株式会社 | 作業機械 |
| JP2021188669A (ja) * | 2020-05-29 | 2021-12-13 | 株式会社竹内製作所 | 作業用車両 |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2943939C (en) * | 2015-09-30 | 2021-10-19 | Deere & Company | Stability warning and control intervention system for a forestry vehicle |
| KR102403564B1 (ko) * | 2016-09-30 | 2022-05-27 | 스미도모쥬기가이고교 가부시키가이샤 | 쇼벨 |
| CN112267503A (zh) * | 2017-01-10 | 2021-01-26 | 株式会社小松制作所 | 作业车辆的控制方法 |
| US10900502B2 (en) * | 2017-08-25 | 2021-01-26 | Parker-Hannifin Corporation | Direct input pilot operated servo valve |
| WO2019053833A1 (ja) * | 2017-09-13 | 2019-03-21 | 日立建機株式会社 | 作業機械 |
| JP6807293B2 (ja) * | 2017-09-26 | 2021-01-06 | 日立建機株式会社 | 作業機械 |
| JP6957414B2 (ja) * | 2018-06-11 | 2021-11-02 | 日立建機株式会社 | 作業機械 |
| CN113677855A (zh) * | 2019-03-29 | 2021-11-19 | 住友建机株式会社 | 挖土机及挖土机的控制装置 |
| CN110925255A (zh) * | 2019-11-19 | 2020-03-27 | 宜昌宜硕塑业有限公司 | 一种比例流量阀 |
| US20230287660A1 (en) * | 2020-09-28 | 2023-09-14 | Nec Corporation | Work control method, work control system, work control apparatus, and non-transitory computer readable medium storing work control program |
| CN113211429A (zh) * | 2021-04-07 | 2021-08-06 | 新兴际华科技发展有限公司 | 消防机器人高精度稳定控制方法 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0551947A (ja) * | 1991-08-26 | 1993-03-02 | Hitachi Constr Mach Co Ltd | 建設機械のアクチユエータ制御装置 |
| JPH0885974A (ja) * | 1994-09-19 | 1996-04-02 | Hitachi Constr Mach Co Ltd | 建設機械の操作システム |
| JP2001199676A (ja) * | 2000-01-17 | 2001-07-24 | Hitachi Constr Mach Co Ltd | 建設機械の操作系油圧回路 |
| JP2006220193A (ja) * | 2005-02-09 | 2006-08-24 | Shin Caterpillar Mitsubishi Ltd | パイロット制御装置 |
| JP2006291647A (ja) * | 2005-04-14 | 2006-10-26 | Shin Caterpillar Mitsubishi Ltd | 作業機械の干渉回避制御装置 |
| WO2012169531A1 (ja) * | 2011-06-10 | 2012-12-13 | 日立建機株式会社 | 作業機械 |
| US20160115669A1 (en) * | 2014-10-22 | 2016-04-28 | Caterpillar Inc. | Boom Assist Management Feature |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2871105B2 (ja) | 1990-12-03 | 1999-03-17 | 油谷重工株式会社 | 解体作業機の安全装置 |
| JP3091667B2 (ja) * | 1995-06-09 | 2000-09-25 | 日立建機株式会社 | 建設機械の領域制限掘削制御装置 |
| JP3679848B2 (ja) * | 1995-12-27 | 2005-08-03 | 日立建機株式会社 | 建設機械の作業範囲制限制御装置 |
| JP3550260B2 (ja) * | 1996-09-30 | 2004-08-04 | コベルコ建機株式会社 | アクチュエータ作動特性制御装置 |
| JPH11182674A (ja) * | 1997-12-17 | 1999-07-06 | Komatsu Ltd | 油圧駆動車両の前後進切換制御装置および制御方法 |
| JP3124962B2 (ja) * | 1998-12-02 | 2001-01-15 | 新キャタピラー三菱株式会社 | 作業用機械の油圧制御回路 |
| DE102006018706A1 (de) * | 2006-04-21 | 2007-10-25 | Robert Bosch Gmbh | Hydraulische Steueranordnung |
| KR100791105B1 (ko) * | 2006-05-23 | 2008-01-02 | 볼보 컨스트럭션 이키프먼트 홀딩 스웨덴 에이비 | 굴삭기 붐 속도 증속장치 |
| JP4931048B2 (ja) * | 2006-07-31 | 2012-05-16 | キャタピラー エス エー アール エル | 作業機械の制御装置 |
| WO2009123134A1 (ja) * | 2008-03-31 | 2009-10-08 | 株式会社小松製作所 | 建設機械の旋回駆動制御システム |
| EP2530208A4 (en) * | 2010-01-28 | 2017-08-09 | Hitachi Construction Machinery Co., Ltd. | Hydraulic work machine |
| JP5363430B2 (ja) * | 2010-07-23 | 2013-12-11 | 日立建機株式会社 | ハイブリッド式建設機械 |
| JP5529241B2 (ja) * | 2012-11-20 | 2014-06-25 | 株式会社小松製作所 | 作業機械および作業機械の作業量計測方法 |
| JP6077015B2 (ja) * | 2013-01-17 | 2017-02-08 | 日立建機株式会社 | 作業機械の圧油エネルギ回収装置 |
| JP6053714B2 (ja) * | 2014-03-31 | 2016-12-27 | 日立建機株式会社 | 油圧ショベル |
| US20170121930A1 (en) * | 2014-06-02 | 2017-05-04 | Komatsu Ltd. | Construction machine control system, construction machine, and method of controlling construction machine |
| US9598841B2 (en) * | 2014-06-04 | 2017-03-21 | Komatsu Ltd. | Construction machine control system, construction machine, and construction machine control method |
| WO2015186214A1 (ja) * | 2014-06-04 | 2015-12-10 | 株式会社小松製作所 | 作業機械の姿勢演算装置、作業機械及び作業機械の姿勢演算方法 |
| DE102014214441B4 (de) * | 2014-07-23 | 2016-02-18 | Danfoss Power Solutions Gmbh & Co. Ohg | Verfahren und Anordnung zum Verzögern eines Hydrostatischen Antriebs |
| CN104452849B (zh) * | 2014-11-07 | 2017-04-05 | 中联重科股份有限公司渭南分公司 | 一种动臂优先控制设备、系统、方法及挖掘机 |
-
2015
- 2015-06-17 JP JP2015122306A patent/JP6619163B2/ja not_active Expired - Fee Related
-
2016
- 2016-02-24 CN CN201610101989.4A patent/CN106256966B/zh not_active Expired - Fee Related
- 2016-02-24 KR KR1020160021711A patent/KR101814657B1/ko not_active Expired - Fee Related
- 2016-06-15 US US15/183,132 patent/US10024032B2/en active Active
- 2016-06-16 EP EP16174832.2A patent/EP3106572B1/en not_active Not-in-force
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0551947A (ja) * | 1991-08-26 | 1993-03-02 | Hitachi Constr Mach Co Ltd | 建設機械のアクチユエータ制御装置 |
| JPH0885974A (ja) * | 1994-09-19 | 1996-04-02 | Hitachi Constr Mach Co Ltd | 建設機械の操作システム |
| JP2001199676A (ja) * | 2000-01-17 | 2001-07-24 | Hitachi Constr Mach Co Ltd | 建設機械の操作系油圧回路 |
| JP2006220193A (ja) * | 2005-02-09 | 2006-08-24 | Shin Caterpillar Mitsubishi Ltd | パイロット制御装置 |
| JP2006291647A (ja) * | 2005-04-14 | 2006-10-26 | Shin Caterpillar Mitsubishi Ltd | 作業機械の干渉回避制御装置 |
| WO2012169531A1 (ja) * | 2011-06-10 | 2012-12-13 | 日立建機株式会社 | 作業機械 |
| US20160115669A1 (en) * | 2014-10-22 | 2016-04-28 | Caterpillar Inc. | Boom Assist Management Feature |
Cited By (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018145753A (ja) * | 2017-03-09 | 2018-09-20 | 日立建機株式会社 | 作業機械の操作支援装置 |
| WO2019053936A1 (ja) * | 2017-09-15 | 2019-03-21 | 日立建機株式会社 | 作業機械 |
| JP2019052499A (ja) * | 2017-09-15 | 2019-04-04 | 日立建機株式会社 | 作業機械 |
| US11414836B2 (en) | 2017-09-15 | 2022-08-16 | Hitachi Construction Machinery Co., Ltd. | Work machine |
| WO2019186840A1 (ja) * | 2018-03-28 | 2019-10-03 | 日立建機株式会社 | 作業機械 |
| JPWO2019186840A1 (ja) * | 2018-03-28 | 2020-04-30 | 日立建機株式会社 | 作業機械 |
| US11149404B2 (en) | 2018-03-28 | 2021-10-19 | Hitachi Construction Machinery Co., Ltd. | Work machine |
| KR20210116569A (ko) * | 2019-09-26 | 2021-09-27 | 히다치 겡키 가부시키 가이샤 | 작업 기계 |
| CN113439140A (zh) * | 2019-09-26 | 2021-09-24 | 日立建机株式会社 | 作业机械 |
| JP2021055258A (ja) * | 2019-09-26 | 2021-04-08 | 日立建機株式会社 | 作業機械 |
| CN113439140B (zh) * | 2019-09-26 | 2022-06-28 | 日立建机株式会社 | 作业机械 |
| US11391020B2 (en) | 2019-09-26 | 2022-07-19 | Hitachi Construction Machinery Co., Ltd. | Work machine |
| WO2021059584A1 (ja) * | 2019-09-26 | 2021-04-01 | 日立建機株式会社 | 作業機械 |
| JP7269143B2 (ja) | 2019-09-26 | 2023-05-08 | 日立建機株式会社 | 作業機械 |
| KR102591520B1 (ko) | 2019-09-26 | 2023-10-20 | 히다치 겡키 가부시키 가이샤 | 작업 기계 |
| JP2021188669A (ja) * | 2020-05-29 | 2021-12-13 | 株式会社竹内製作所 | 作業用車両 |
Also Published As
| Publication number | Publication date |
|---|---|
| US20160369480A1 (en) | 2016-12-22 |
| EP3106572B1 (en) | 2018-06-06 |
| JP6619163B2 (ja) | 2019-12-11 |
| CN106256966A (zh) | 2016-12-28 |
| US10024032B2 (en) | 2018-07-17 |
| KR20160149139A (ko) | 2016-12-27 |
| CN106256966B (zh) | 2018-08-03 |
| KR101814657B1 (ko) | 2018-01-04 |
| EP3106572A1 (en) | 2016-12-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6619163B2 (ja) | 作業機械 | |
| JP6487872B2 (ja) | 作業機械の駆動制御装置 | |
| CN110546327B (zh) | 作业机械 | |
| KR100281009B1 (ko) | 2피스부움식 유압셔블의 간섭 방지장치 | |
| WO2018207267A1 (ja) | 作業機械 | |
| WO2019182128A1 (ja) | ショベル | |
| US5875701A (en) | Method and apparatus for controlling an implement of a work machine using linkage angles | |
| WO2019065122A1 (ja) | ホイールローダ | |
| JP5835297B2 (ja) | 建設機械 | |
| JP2003184133A (ja) | 油圧作業機の振動抑制装置 | |
| JP7610023B2 (ja) | 作業機械 | |
| JP3850594B2 (ja) | 油圧作業機の油圧制御装置 | |
| WO2020054507A1 (ja) | 建設機械 | |
| KR102054519B1 (ko) | 건설기계의 유압시스템 | |
| JP7681417B2 (ja) | 建設機械 | |
| JP7624505B2 (ja) | 作業機械 | |
| JP6591370B2 (ja) | 建設機械の油圧制御装置 | |
| JP3466371B2 (ja) | 建設機械の干渉防止装置 | |
| US20250223782A1 (en) | Work machine | |
| JP2012007656A (ja) | 作業機械の旋回用油圧制御装置 | |
| EP4484655A1 (en) | Work machine | |
| JP2023119409A (ja) | 建設機械の制御装置およびこれを備えた建設機械 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180309 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180309 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190109 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190212 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20190412 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190612 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20191112 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191114 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6619163 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |