JP2016508917A - ハンドルの手検出システム - Google Patents
ハンドルの手検出システム Download PDFInfo
- Publication number
- JP2016508917A JP2016508917A JP2015557218A JP2015557218A JP2016508917A JP 2016508917 A JP2016508917 A JP 2016508917A JP 2015557218 A JP2015557218 A JP 2015557218A JP 2015557218 A JP2015557218 A JP 2015557218A JP 2016508917 A JP2016508917 A JP 2016508917A
- Authority
- JP
- Japan
- Prior art keywords
- sensor
- detection system
- disposed
- handle
- mat
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/04—Hand wheels
- B62D1/046—Adaptations on rotatable parts of the steering wheel for accommodation of switches
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B62—LAND VEHICLES FOR TRAVELLING OTHERWISE THAN ON RAILS
- B62D—MOTOR VEHICLES; TRAILERS
- B62D1/00—Steering controls, i.e. means for initiating a change of direction of the vehicle
- B62D1/02—Steering controls, i.e. means for initiating a change of direction of the vehicle vehicle-mounted
- B62D1/04—Hand wheels
- B62D1/06—Rims, e.g. with heating means; Rim covers
- B62D1/065—Steering wheels with heating and ventilating means
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01L—MEASURING FORCE, STRESS, TORQUE, WORK, MECHANICAL POWER, MECHANICAL EFFICIENCY, OR FLUID PRESSURE
- G01L1/00—Measuring force or stress, in general
- G01L1/20—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress
- G01L1/205—Measuring force or stress, in general by measuring variations in ohmic resistance of solid materials or of electrically-conductive fluids; by making use of electrokinetic cells, i.e. liquid-containing cells wherein an electrical potential is produced or varied upon the application of stress using distributed sensing elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W40/00—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models
- B60W40/08—Estimation or calculation of non-directly measurable driving parameters for road vehicle drive control systems not related to the control of a particular sub unit, e.g. by using mathematical models related to drivers or passengers
Landscapes
- Engineering & Computer Science (AREA)
- Transportation (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Mathematical Physics (AREA)
- Steering Controls (AREA)
- Force Measurement Appropriate To Specific Purposes (AREA)
- Auxiliary Drives, Propulsion Controls, And Safety Devices (AREA)
- Traffic Control Systems (AREA)
Abstract
Description
Claims (42)
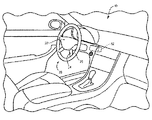
- 内側領域及び外側領域を有するハンドルと、
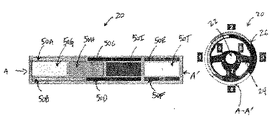
前記ハンドルに配置された複数のセンサループを含むセンサマットであって、前記センサマットの各々が検知区域を画定する、センサマットと、
前記検知区域のうちの1つ以上に対応する前記ハンドルの一部分を押す運転者の手を検出するように構成された制御ユニットであって、前記センサループのうちの1つ以上が、前記ハンドルの前記内側領域及び前記外側領域の各々に配置される、制御ユニットと、を備える、手検出システム。 - 前記センサループのうちの2つ以上は、前記内側領域及び前記外側領域のうちの少なくとも一方に離間されたパターンで配置される、請求項1に記載の手検出システム。
- 前記センサループのうちの前記2つ以上は、前記外側領域に前記離間されたパターンで配置される、請求項2に記載の手検出システム。
- 前記センサループの各々は、接触検知区域を画定する、請求項3に記載の手検出システム。
- 前記外側領域に配置された前記センサループの各々は、スワイプ検知区域を画定する、請求項3に記載の手検出システム。
- 前記外側領域に配置された前記センサループのうちの前記2つ以上の各々は、前記内側領域に配置された前記センサループのうちの前記1つ以上の各々の一部分と部分的に重なり合う、請求項3に記載の手検出システム。
- 前記センサループの前記重なり合う部分は、少なくとも2つのグリップ検知区域を画定する、請求項6に記載の手検出システム。
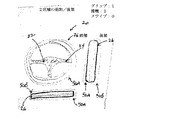
- 前記センサループの各々は、電気信号を前記制御ユニットに伝達するための導電性リード線をさらに備える、請求項3に記載の手検出システム。
- 前記センサループのうちの少なくとも1つに対する前記導電性リード線は、任意の隣接したセンサループによって画定された前記検知区域のうちのいずれかの一部分に延在することなく経路指定される、請求項8に記載の手検出システム。
- 前記センサループのうちの2つ以上は、前記内側領域及び前記外側領域の各々に離間されたパターンで配置される、請求項1に記載の手検出システム。
- 前記センサループの各々は、接触検知区域を画定する、請求項10に記載の手検出システム。
- 前記外側領域内の前記センサループの各々は、スワイプ検知区域を画定する、請求項10に記載の手検出システム。
- 前記外側領域に配置された前記センサループのうちの少なくとも1つは、前記内側領域に配置された前記センサループのうちの少なくとも2つの一部分と重なり合う、請求項10に記載の手検出システム。
- 前記センサループの前記重なり合う部分は、少なくとも2つのグリップ検知区域を画定する、請求項13に記載の手検出システム。
- 前記外側領域に配置された前記センサループのうちの前記少なくとも1つの中心点は、前記内側領域に配置された前記センサループのうちの前記少なくとも2つの各々の中心点に対しておよそ90度以下で位置決めされる、請求項13に記載の手検出システム。
- 前記センサループの各々は、電気信号を前記制御ユニットに伝達するための導電性リード線をさらに備える、請求項10に記載の手検出システム。
- 前記センサループのうちの少なくとも1つに対する前記導電性リード線は、任意の隣接したセンサループによって画定された前記検知区域のうちのいずれかの一部分に延在することなく経路指定される、請求項16に記載の手検出システム。
- 前記センサループのうちの前記少なくとも1つに対する前記導電性リード線は、前記外側領域に配置された前記センサループのうちの少なくとも1つに対する前記導電性リード線である、請求項17に記載の手検出システム。
- 前記外側領域に配置された前記センサループのうちの前記少なくとも1つに対する前記導電性リード線は、前記内側領域に配置された前記センサループのうちの少なくとも2つの間の空間を通って経路指定される、請求項18に記載の手検出システム。
- 前記センサループのうちの少なくとも1つに対する前記導電性リード線は、隣接したセンサループによって画定された前記検知区域の一部分を通って経路指定され、前記検知区域の前記一部分を通って経路指定される前記導電性リード線の少なくとも一区分は、遮蔽層を備える、請求項16に記載の手検出システム。
- 前記ハンドルは、
車両のステアリングコラムへの接続のためのハブと、
前記ハブの周囲に延在するリムであって、前記内側領域及び前記外側領域を有する、リムと、
前記ハブと前記リムを接続する複数のスポークであって、前記センサループのうちの前記少なくとも1つに対する前記導電性リード線は、前記リムから前記スポークのうちの1つが前記リムと接続する領域を通って経路指定される、複数のスポークと、をさらに備える、請求項17に記載の手検出システム。 - 前記ハンドルは、
車両のステアリングコラムへの接続のためのハブと、
前記ハブの周囲に延在するリムであって、前記内側領域及び前記外側領域を有する、リムと、
前記ハブと前記リムを接続する複数のスポークであって、前記センサループのうちの前記少なくとも1つに対する前記導電性リード線は、前記リムから前記スポークのうちの1つが前記リムと接続する領域を通って経路指定される、複数のスポークと、をさらに備える、請求項20に記載の手検出システム。 - 前記センサマットは、感圧材料を含む、請求項1に記載の手検出システム。
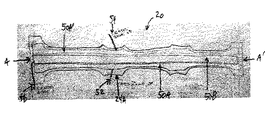
- 前記ハンドルに配置された少なくとも1つのヒーターマットと、
前記ハンドルに配置された少なくとも1つのオーバーモールド層と、さらに備え、前記オーバーモールド層は、前記少なくとも1つのヒーターマットと前記センサマットとの間に配置される、請求項1に記載の手検出システム。 - 前記少なくとも1つのオーバーモールド層は、ポリウレタン発泡体を含む、請求項24に記載の手検出システム。
- 前記少なくとも1つのオーバーモールド層は、熱可塑性エラストマー発泡体を含む、請求項24に記載の手検出システム。
- 前記ハンドルは、
前記ハンドルのリムを画定する電機子と、
前記電機子の少なくとも一部分の周囲に配置された外皮であって、前記センサマットのうちの少なくとも1つ及び前記少なくとも1つのヒーターマットの上に配置される、外皮と、をさらに備える、請求項24に記載の手検出システム。 - 少なくとも2つのオーバーモールド層をさらに備え、第1のオーバーモールド層が、前記センサマットと前記電機子との間に配置され、第2のオーバーモールド層が、前記センサマットと前記少なくとも1つのヒーターマットとの間に配置される、請求項27に記載の手検出システム。
- 前記オーバーモールド層のうちの少なくとも1つは、ポリウレタン発泡体を含む、請求項28に記載の手検出システム。
- 前記オーバーモールド層の少なくとも1つは、熱可塑性エラストマー発泡体を含む、請求項28に記載の手検出システム。
- 少なくとも2つのオーバーモールド層をさらに備え、第1のオーバーモールド層が、前記少なくとも1つのヒーターマットと前記電機子との間に配置され、第2のオーバーモールド層が、前記少なくとも1つのヒーターマットと前記センサマットとの間に配置される、請求項27に記載の手検出システム。
- 前記オーバーモールド層のうちの少なくとも1つは、ポリウレタン発泡体を含む、請求項31に記載の手検出システム。
- 前記オーバーモールド層の少なくとも1つは、熱可塑性エラストマー発泡体を含む、請求項31に記載の手検出システム。
- 前記センサマットは、交互の突出部及び切欠部を画定する対向縁部を有し、前記対向縁部の前記交互の突出部及び切欠部は、前記センサマットが前記ハンドルに配置されるときに交互配置領域を作成する、請求項1に記載の手検出システム。
- 前記対向縁部は、鋸歯パターン及び城郭パターンのうちの少なくとも一方を画定する、請求項34に記載の手検出システム。
- ハンドルと、
前記ハンドルに配置された検知区域を画定するセンサマットと、
前記ハンドルに配置された加熱区域を画定するヒーターマットと、
前記ハンドルに配置されたオーバーモールド層であって、前記ヒーターマットと前記センサマットとの間に配置される、オーバーモールド層と、
前記検知区域に対応する前記ハンドルの一部分を押す運転者の手を検出するように構成された制御ユニットと、を備える、手検出システム。 - 前記ハンドルは、
前記ハンドルのリムを画定する電機子と、
前記電機子の少なくとも一部分の周囲に配置された外皮であって、前記センサマット及び前記ヒーターマットのうちの少なくとも一方の上に配置される、外皮と、をさらに備える、請求項36に記載の手検出システム。 - 少なくとも2つのオーバーモールド層をさらに備え、第1のオーバーモールド層が、前記センサマットと前記電機子との間に配置され、第2のオーバーモールド層が、前記センサマットと前記ヒーターマットとの間に配置される、請求項37に記載の手検出システム。
- 少なくとも2つのオーバーモールド層をさらに備え、第1のオーバーモールド層が、前記ヒーターマットと前記電機子との間に配置され、第2のオーバーモールド層が、前記少なくとも1つのヒーターマットと前記センサマットとの間に配置される、請求項37に記載の手検出システム。
- 前記オーバーモールド層は、ポリウレタン発泡体または熱可塑性エラストマー発泡体を含む、請求項36に記載の手検出システム。
- ハンドルと、
前記ハンドルに配置された検知区域を画定するセンサマットと、
前記検知区域に対応する前記ハンドルの一部分を押す運転者の手を検出するように構成された制御ユニットと、を備え、前記センサマットは、交互の突出部及び切欠部を画定する対向縁部を有し、前記対向縁部の前記交互の突出部及び切欠部は、前記センサマットが前記ハンドルに配置されるときに交互配置領域を作成する、手検出システム。 - 前記対向縁部は、鋸歯パターン及び城郭パターンのうちの少なくとも一方を画定する、請求項41に記載の手検出システム。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361764265P | 2013-02-13 | 2013-02-13 | |
| US61/764,265 | 2013-02-13 | ||
| PCT/US2014/016023 WO2014126999A1 (en) | 2013-02-13 | 2014-02-12 | Steering wheel hand detection systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2016508917A true JP2016508917A (ja) | 2016-03-24 |
| JP6398994B2 JP6398994B2 (ja) | 2018-10-03 |
Family
ID=51296492
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015557218A Active JP6398994B2 (ja) | 2013-02-13 | 2014-02-12 | ハンドルの手検出システム |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9248851B2 (ja) |
| JP (1) | JP6398994B2 (ja) |
| CN (1) | CN105143015B (ja) |
| DE (1) | DE112014000795T5 (ja) |
| WO (1) | WO2014126999A1 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020152365A (ja) * | 2019-01-25 | 2020-09-24 | パナソニックIpマネジメント株式会社 | ステアリングヒータ |
| CN113396084A (zh) * | 2019-01-31 | 2021-09-14 | 奥托立夫开发公司 | 用于车辆方向盘的检测装置 |
| JP7454651B2 (ja) | 2019-08-23 | 2024-03-22 | オートリブ ディベロップメント エービー | 車両ステアリングホイール |
Families Citing this family (80)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9292471B2 (en) | 2011-02-18 | 2016-03-22 | Honda Motor Co., Ltd. | Coordinated vehicle response system and method for driver behavior |
| US8698639B2 (en) | 2011-02-18 | 2014-04-15 | Honda Motor Co., Ltd. | System and method for responding to driver behavior |
| DE102011084903A1 (de) | 2011-10-20 | 2013-04-25 | TAKATA Aktiengesellschaft | Sensorsysteme für ein Kraftfahrzeug |
| US9751534B2 (en) | 2013-03-15 | 2017-09-05 | Honda Motor Co., Ltd. | System and method for responding to driver state |
| US11254209B2 (en) | 2013-03-15 | 2022-02-22 | Honda Motor Co., Ltd. | System and method for controlling vehicle systems in a vehicle |
| US10358034B2 (en) | 2016-03-30 | 2019-07-23 | Honda Motor Co., Ltd. | System and method for controlling a vehicle display in a moving vehicle |
| US9475521B1 (en) | 2015-06-08 | 2016-10-25 | Honda Motor Co., Ltd. | Failsafe detection |
| US10499856B2 (en) | 2013-04-06 | 2019-12-10 | Honda Motor Co., Ltd. | System and method for biological signal processing with highly auto-correlated carrier sequences |
| GB2525840B (en) | 2014-02-18 | 2016-09-07 | Jaguar Land Rover Ltd | Autonomous driving system and method for same |
| DE102014007163B3 (de) * | 2014-05-15 | 2015-09-24 | Florian Gerber | Überwachungssystem für Kraftfahrzeuge |
| WO2015179730A1 (en) | 2014-05-22 | 2015-11-26 | Tk Holdings Inc. | Systems and methods for shielding a hand sensor system in a steering wheel |
| DE112015002601T5 (de) | 2014-06-02 | 2017-05-04 | Tk Holdings Inc. | Systeme und Verfahren zum Drucken von Sensorschaltkreisen auf eine Sensormatte für ein Lenkrad |
| DE102014218207A1 (de) * | 2014-09-11 | 2016-03-17 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Bedieneinheit |
| CN104386046B (zh) * | 2014-09-18 | 2018-03-20 | 李军廷 | 一种刹车方法、装置及汽车 |
| DE102014223128A1 (de) * | 2014-11-12 | 2016-05-12 | Bayerische Motoren Werke Ag | Lenkrad mit einem Sensoraufbau zur Belegterkennung einer beheizten Kontaktfläche, Lenkradsystem und Verfahren zur Belegterkennung einer beheizten Kontaktfläche |
| FR3023519A1 (fr) * | 2014-12-09 | 2016-01-15 | Continental Automotive France | Systeme pour detecter la presence et la position de main et/ou de doigt sur un volant |
| LU92732B1 (en) * | 2015-06-05 | 2016-12-06 | Iee Int Electronics & Eng Sa | Capacitive detection device and system for use in vehicle interior |
| DE102015211056A1 (de) * | 2015-06-16 | 2016-12-22 | Ford Global Technologies, Llc | Vorrichtung zur Belüftung einer Lenkradumgebung und Verfahren zum Betrieb der Vorrichtung |
| CN106240487B (zh) | 2015-09-28 | 2018-11-20 | 北京智谷睿拓技术服务有限公司 | 交互方法、交互装置及车载设备 |
| FR3043381B1 (fr) * | 2015-11-11 | 2018-04-27 | Autoliv Development Ab | Volant de vehicule |
| WO2017107005A1 (zh) * | 2015-12-21 | 2017-06-29 | 深圳市柔宇科技有限公司 | 车辆安全驾驶控制系统 |
| CN105691437A (zh) * | 2016-01-27 | 2016-06-22 | 苏州寅初信息科技有限公司 | 一种针对手体贴合面进行加热、冷却的方向盘 |
| CN105711634A (zh) * | 2016-01-27 | 2016-06-29 | 苏州寅初信息科技有限公司 | 一种基于环境温度进行加热、冷却的方向盘 |
| DE102016201406B4 (de) * | 2016-01-29 | 2020-03-26 | Joyson Safety Systems Germany Gmbh | Lenkrad für ein Kraftfahrzeug |
| CN108602434B (zh) | 2016-02-09 | 2021-04-13 | 克朗设备公司 | 用于材料处理车辆的安装杆组件 |
| FR3047718B1 (fr) * | 2016-02-17 | 2019-07-12 | Autoliv Development Ab | Volant de vehicule |
| DE102016204864A1 (de) | 2016-03-23 | 2017-09-28 | TAKATA Aktiengesellschaft | Lenkradbaugruppe |
| US10336361B2 (en) | 2016-04-04 | 2019-07-02 | Joyson Safety Systems Acquisition Llc | Vehicle accessory control circuit |
| US10293783B2 (en) | 2016-05-19 | 2019-05-21 | Ford Global Technologies, Llc | Driver detection steering wheel |
| US10043084B2 (en) * | 2016-05-27 | 2018-08-07 | Toyota Jidosha Kabushiki Kaisha | Hierarchical context-aware extremity detection |
| US10926662B2 (en) | 2016-07-20 | 2021-02-23 | Joyson Safety Systems Acquisition Llc | Occupant detection and classification system |
| US20180093696A1 (en) * | 2016-09-30 | 2018-04-05 | Ford Global Technologies, Llc | Steering wheel assembly and heated steering wheel system |
| JP6674556B2 (ja) * | 2016-10-28 | 2020-04-01 | 本田技研工業株式会社 | ステアリングホイールユニット |
| DE102017111297A1 (de) | 2016-12-15 | 2018-06-21 | UC Universal Consulting GmbH | Verfahren zur Herstellung eines Lenkrades mit einem Sensoraufbau zur Ein- und Mehrzonen- Hand-Belegterkennung und einer beheizbaren Kontaktfläche |
| FR3062106A1 (fr) * | 2017-01-23 | 2018-07-27 | Autoliv Development Ab | Volant de vehicule |
| JP6655825B2 (ja) * | 2017-03-13 | 2020-02-26 | パナソニックIpマネジメント株式会社 | グリップセンサ、ステアリングホイールおよび車両 |
| IT201700048117A1 (it) * | 2017-05-04 | 2018-11-04 | Irca Spa | Dispositivo di riscaldamento e rilevamento capacitivo per il volante di un veicolo |
| US11032875B2 (en) | 2017-05-15 | 2021-06-08 | Joyson Safety Systems Acquisition Llc | Systems and methods for heating and sensing proximity to vehicle components |
| US11211931B2 (en) | 2017-07-28 | 2021-12-28 | Joyson Safety Systems Acquisition Llc | Sensor mat providing shielding and heating |
| DE102017117610A1 (de) * | 2017-08-03 | 2019-02-07 | Trw Automotive Gmbh | Verfahren zum Erkennen von Händen eines Fahrers auf einem Lenkrad eines Fahrzeuges |
| FR3070635B1 (fr) * | 2017-09-05 | 2019-08-23 | Continental Automotive France | Palette tactile a effet optique sur volant de conduite pour detection de doigt |
| LU100509B1 (en) * | 2017-11-03 | 2019-05-08 | Iee Sa | System for Hand Detection on a Steering Wheel |
| KR102534668B1 (ko) * | 2018-01-05 | 2023-05-22 | 현대자동차주식회사 | 스티어링 휠 |
| JP6998782B2 (ja) * | 2018-02-06 | 2022-02-10 | 日本プラスト株式会社 | ハンドル用被覆部材、ハンドル、及びハンドルの製造方法 |
| JP7055661B2 (ja) * | 2018-02-22 | 2022-04-18 | 本田技研工業株式会社 | 車両制御装置 |
| JP6691568B2 (ja) * | 2018-03-29 | 2020-04-28 | 株式会社Subaru | 運転支援システム |
| LU100755B1 (en) * | 2018-03-30 | 2019-10-01 | Iee Sa | Sensor Arrangement for Capacitive Position Detection of an Object |
| DE102018113879A1 (de) * | 2018-06-11 | 2019-12-12 | Trw Automotive Safety Systems Gmbh | Verfahren zur Erkennung einer Berührung einer handbetätigten Lenkeinrichtung, insbesondere eines Fahrzeuglenkrads, und Vorrichtung zur Durchführung des Verfahrens |
| CN108791058A (zh) * | 2018-06-27 | 2018-11-13 | 梧州学院 | 一种基于方向盘握力的安全驾驶检测装置及其控制方法 |
| DE102018217333A1 (de) * | 2018-10-10 | 2020-04-16 | Mahle International Gmbh | Lenkeinrichtung für ein Fahrzeug |
| US10807628B2 (en) * | 2018-11-16 | 2020-10-20 | Aisin Seiki Kabushiki Kaisha | Steering apparatus |
| LU101018B1 (en) * | 2018-11-27 | 2020-05-27 | Iee Sa | Sensor Arrangement for Capacitive Position Detection of a Hand on a Steering Wheel |
| WO2020195620A1 (ja) * | 2019-03-25 | 2020-10-01 | アルプスアルパイン株式会社 | センサ装置及びステアリングホイール |
| CN111753589B (zh) * | 2019-03-28 | 2022-05-03 | 虹软科技股份有限公司 | 手握方向盘状态的检测方法及装置 |
| CN110032227B (zh) * | 2019-04-08 | 2021-03-30 | 北京小米移动软件有限公司 | 加热控制方法及装置、加热设备、机器可读存储介质 |
| CN109969248A (zh) * | 2019-04-29 | 2019-07-05 | 延锋百利得(上海)汽车安全系统有限公司 | 一种车辆方向盘 |
| US11001167B2 (en) | 2019-06-14 | 2021-05-11 | Joyson Safety Systems Acquisition Llc | Apparatus and method of producing a sensing substrate |
| CN114222694B (zh) * | 2019-07-10 | 2023-10-31 | Iee国际电子工程股份公司 | 利用方向盘中的双区传感器检测手握持的设备和方法 |
| LU101450B1 (en) * | 2019-10-18 | 2021-04-20 | Iee Sa | Device and Method for Detecting a Hand Grasp with a Two-Zone Sensor in the Steering Wheel |
| CN110356324A (zh) * | 2019-08-20 | 2019-10-22 | 浙江泰康电子有限公司 | 汽车方向盘手离检测系统 |
| US20230036695A1 (en) * | 2019-09-04 | 2023-02-02 | Lg Electronics Inc. | Method for transmitting and receiving message in wireless communication system and vehicle therefor |
| CN110562313A (zh) * | 2019-09-19 | 2019-12-13 | 安闻汽车技术(天津)有限公司 | 一种加热装置及方向盘 |
| FR3101597A1 (fr) * | 2019-10-03 | 2021-04-09 | Autoliv Development Ab | Câblage supporté par nappe |
| DE202019106523U1 (de) | 2019-11-22 | 2019-12-17 | MöllerTech Engineering GmbH | Interieurbauteil, Innenraumverkleidungsbauteil und Anordnung für ein Fahrzeug |
| DE102019134750B4 (de) * | 2019-12-17 | 2021-11-04 | Bayerische Motoren Werke Aktiengesellschaft | Lenkrad mit Zweihandberührungserkennung |
| FR3115262B1 (fr) * | 2020-10-16 | 2023-01-20 | Commissariat Energie Atomique | Dispositif de détection de contact multipoint et procédé |
| US11198387B1 (en) | 2020-12-09 | 2021-12-14 | Autoliv Asp, Inc. | Heat dissipation of a light bar assembly of a steering wheel |
| US11267499B1 (en) | 2020-12-09 | 2022-03-08 | Autoliv Asp, Inc. | Wrapping for a steering wheel |
| US11130443B1 (en) | 2020-12-09 | 2021-09-28 | Autoliv Asp, Inc. | Light bar assemblies for a steering wheel |
| US11312294B1 (en) | 2020-12-10 | 2022-04-26 | Autolive Asp, Inc. | Light bar assemblies for a steering wheel |
| IL279430A (en) * | 2020-12-14 | 2022-07-01 | Krishevski Aharon | Vehicle reporting system |
| CN112706708B (zh) * | 2021-01-15 | 2022-12-13 | 安闻汽车技术(天津)有限公司 | 一种方向盘内外辕分区探测的传感器系统及方向盘 |
| JP2022134603A (ja) * | 2021-03-03 | 2022-09-15 | 株式会社東海理化電機製作所 | 接触検知センサ及び接触検知装置 |
| CN113386847A (zh) * | 2021-04-30 | 2021-09-14 | 深圳市沃特沃德信息有限公司 | 车辆把手的保暖方法、装置和计算机设备 |
| DE102022110982A1 (de) * | 2021-05-19 | 2022-11-24 | Toyoda Gosei Co., Ltd. | Handgriff |
| US11702138B2 (en) | 2021-05-24 | 2023-07-18 | Toyota Research Institute, Inc. | Method for lateral control assistance to enable one-handed driving of a vehicle |
| FR3124475A1 (fr) | 2021-06-24 | 2022-12-30 | Autoliv Development Ab | Volant de véhicule avec une jante comprenant un dispositif électrique |
| CN114212143B (zh) * | 2021-12-20 | 2022-09-16 | 海安荣民汽车配件有限公司 | 一种安全性高的节能型方向盘加热垫 |
| CN114148401B (zh) * | 2021-12-31 | 2023-06-06 | 盐城同济汽车配件有限公司 | 一种带有加热机构的汽车方向盘骨架 |
| JP2023105693A (ja) * | 2022-01-19 | 2023-07-31 | 株式会社東海理化電機製作所 | ステアリング |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61146670A (ja) * | 1984-12-18 | 1986-07-04 | Daihatsu Motor Co Ltd | 自動車用内装品のハンドウオ−マ装置 |
| JPH03112772A (ja) * | 1989-09-28 | 1991-05-14 | Nippon Plast Co Ltd | ステアリングホイール |
| JPH09226597A (ja) * | 1996-02-20 | 1997-09-02 | Nippon Plast Co Ltd | ステアリングホイール |
| JP2000228126A (ja) * | 1999-02-05 | 2000-08-15 | Matsushita Electric Ind Co Ltd | ステアリング入力装置 |
| US6326593B1 (en) * | 1998-02-04 | 2001-12-04 | Takata-Petri Ag | Heating element for a part of an automobile which is held, especially the steering wheel |
| JP2006176037A (ja) * | 2004-12-24 | 2006-07-06 | Aisin Seiki Co Ltd | ハンドル冷却加熱装置 |
| WO2011016868A1 (en) * | 2009-08-06 | 2011-02-10 | North American Rescue, Llc | Direct application automotive steering wheel heater |
| JP2011219085A (ja) * | 2010-04-02 | 2011-11-04 | Tk Holdings Inc | 手の圧力を感知するステアリングホイール |
| US20120326735A1 (en) * | 2011-06-22 | 2012-12-27 | Tk Holdings Inc. | Sensor system for steering wheel for vehicle |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3585626A (en) | 1967-06-13 | 1971-06-15 | Cesare Tartarini | Safety alarm device for drivers |
| JPS61146671A (ja) | 1984-12-18 | 1986-07-04 | Daihatsu Motor Co Ltd | 自動車用内装品のハンドウオ−マ装置 |
| US6016103A (en) | 1997-09-25 | 2000-01-18 | Leavitt; Larry | Sleep-detecting driving gloves |
| US6172610B1 (en) | 1999-04-08 | 2001-01-09 | Robert S. Prus | Sleeping driver detector and alarm system |
| US6661345B1 (en) | 1999-10-22 | 2003-12-09 | The Johns Hopkins University | Alertness monitoring system |
| US7383283B2 (en) | 2001-10-16 | 2008-06-03 | Joseph Carrabis | Programable method and apparatus for real-time adaptation of presentations to individuals |
| JP3601511B2 (ja) | 2001-12-18 | 2004-12-15 | トヨタ自動車株式会社 | シートベルト装置 |
| US6590499B1 (en) | 2002-02-04 | 2003-07-08 | D'agosto Joseph | Monitor alarm for detecting vehicle driver's sleepiness |
| CN101248466A (zh) | 2005-05-06 | 2008-08-20 | 杰罗姆·阿诺德·鲍尔 | 睡眠警戒设备 |
| US7830265B2 (en) | 2005-05-06 | 2010-11-09 | Jerome Arnold Power | Sleep alert device |
| JP2007283932A (ja) | 2006-04-18 | 2007-11-01 | Toyota Motor Corp | 車両用乗員温熱装置 |
| JP2008059459A (ja) | 2006-09-01 | 2008-03-13 | Toyota Motor Corp | 車両用注意喚起システム |
| JP5347357B2 (ja) | 2008-07-15 | 2013-11-20 | 新日鐵住金株式会社 | 意識低下検出方法及びシステム、居眠り運転防止方法及びシステム、並びにプログラム |
| US20100102972A1 (en) | 2008-10-29 | 2010-04-29 | Transportation Safety Products, Inc. | Driver inattention detection system and methodology |
| JP2011063103A (ja) | 2009-09-16 | 2011-03-31 | Denso Corp | 車載機器操作システム |
| US20110257846A1 (en) * | 2009-11-13 | 2011-10-20 | William Bennett | Wheel watcher |
| US8405496B2 (en) | 2009-11-13 | 2013-03-26 | William Bennett | Wheel watcher |
| US8564424B2 (en) * | 2009-12-07 | 2013-10-22 | Inventioneers Etc., Llc | Steering wheel hand position sensing device |
| US9007190B2 (en) | 2010-03-31 | 2015-04-14 | Tk Holdings Inc. | Steering wheel sensors |
| US8547215B2 (en) * | 2010-11-24 | 2013-10-01 | Denso Corporation | Information presentation apparatus and system |
| US8738224B2 (en) | 2011-01-12 | 2014-05-27 | GM Global Technology Operations LLC | Steering wheel system |
| US20120232751A1 (en) | 2011-03-07 | 2012-09-13 | Jorge Guspan | Pressure-Sensitive Steering Wheel Controls |
| DE102011076174A1 (de) * | 2011-05-20 | 2012-11-22 | Robert Bosch Gmbh | Haptisches Lenkrad, Lenkradsystem und Fahrerassistenzsystem für ein Kraftfahrzeug |
| CN102745231B (zh) * | 2012-03-16 | 2014-05-14 | 浙江吉利汽车研究院有限公司 | 感应式汽车方向盘警示系统和控制方法 |
| US8757658B2 (en) | 2012-08-24 | 2014-06-24 | Feinstein Patents Llc | Adjustable grip steering wheel safety system to protect hands and upper extremities in low impact collisions |
-
2014
- 2014-02-12 US US14/178,578 patent/US9248851B2/en active Active
- 2014-02-12 CN CN201480008587.9A patent/CN105143015B/zh active Active
- 2014-02-12 JP JP2015557218A patent/JP6398994B2/ja active Active
- 2014-02-12 DE DE112014000795.1T patent/DE112014000795T5/de active Pending
- 2014-02-12 WO PCT/US2014/016023 patent/WO2014126999A1/en active Application Filing
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS61146670A (ja) * | 1984-12-18 | 1986-07-04 | Daihatsu Motor Co Ltd | 自動車用内装品のハンドウオ−マ装置 |
| JPH03112772A (ja) * | 1989-09-28 | 1991-05-14 | Nippon Plast Co Ltd | ステアリングホイール |
| JPH09226597A (ja) * | 1996-02-20 | 1997-09-02 | Nippon Plast Co Ltd | ステアリングホイール |
| US6326593B1 (en) * | 1998-02-04 | 2001-12-04 | Takata-Petri Ag | Heating element for a part of an automobile which is held, especially the steering wheel |
| JP2000228126A (ja) * | 1999-02-05 | 2000-08-15 | Matsushita Electric Ind Co Ltd | ステアリング入力装置 |
| JP2006176037A (ja) * | 2004-12-24 | 2006-07-06 | Aisin Seiki Co Ltd | ハンドル冷却加熱装置 |
| WO2011016868A1 (en) * | 2009-08-06 | 2011-02-10 | North American Rescue, Llc | Direct application automotive steering wheel heater |
| JP2013505865A (ja) * | 2009-08-06 | 2013-02-21 | ノース アメリカン レスキュー リミテッド ライアビリティー カンパニー | 自動車のハンドルへの直接適用ヒータ |
| JP2011219085A (ja) * | 2010-04-02 | 2011-11-04 | Tk Holdings Inc | 手の圧力を感知するステアリングホイール |
| US20120326735A1 (en) * | 2011-06-22 | 2012-12-27 | Tk Holdings Inc. | Sensor system for steering wheel for vehicle |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020152365A (ja) * | 2019-01-25 | 2020-09-24 | パナソニックIpマネジメント株式会社 | ステアリングヒータ |
| CN113396084A (zh) * | 2019-01-31 | 2021-09-14 | 奥托立夫开发公司 | 用于车辆方向盘的检测装置 |
| JP2022519582A (ja) * | 2019-01-31 | 2022-03-24 | オートリブ ディベロップメント エービー | 車両ステアリングホイール用の検知装置 |
| JP7245919B2 (ja) | 2019-01-31 | 2023-03-24 | オートリブ ディベロップメント エービー | 車両ステアリングホイール用の検知装置 |
| JP7454651B2 (ja) | 2019-08-23 | 2024-03-22 | オートリブ ディベロップメント エービー | 車両ステアリングホイール |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105143015B (zh) | 2018-06-29 |
| DE112014000795T5 (de) | 2015-10-29 |
| WO2014126999A1 (en) | 2014-08-21 |
| CN105143015A (zh) | 2015-12-09 |
| JP6398994B2 (ja) | 2018-10-03 |
| US20140224040A1 (en) | 2014-08-14 |
| US9248851B2 (en) | 2016-02-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6398994B2 (ja) | ハンドルの手検出システム | |
| JP6466307B2 (ja) | 手の圧力を感知するステアリングホイール | |
| US9007190B2 (en) | Steering wheel sensors | |
| US20200039559A1 (en) | Steering wheel assembly | |
| US9829979B2 (en) | Automotive touchscreen controls with simulated texture for haptic feedback | |
| EP1663720B1 (en) | Vehicle touch input device | |
| US20190001879A1 (en) | Smart functional leather for steering wheel and dash board | |
| US20170021762A1 (en) | Haptic System And Method Of Controlling A Haptic System | |
| EP3645340A1 (en) | Methods of making smart functional leather | |
| US10336361B2 (en) | Vehicle accessory control circuit | |
| EP3645341A1 (en) | Smart functional leather for recharging a portable electronic device | |
| US10802701B2 (en) | Vehicle including touch input device and control method of the vehicle | |
| JP2015093550A (ja) | 車載機器操作システム、及び操作装置 | |
| US10166868B2 (en) | Vehicle-mounted equipment operation support system | |
| JP3668834B2 (ja) | 車両用表示装置 | |
| JP2019123472A (ja) | 車両用入力装置 | |
| WO2018170689A1 (zh) | 汽车转向盘及车载电子设备交互控制方法 | |
| JP5821696B2 (ja) | 車両における操作対象装置の制御装置及び制御方法 | |
| CN110045853A (zh) | 触摸控制装置和具有该触摸控制装置的车辆 | |
| JP6557201B2 (ja) | 車載機器操作装置 | |
| JP6581867B2 (ja) | ステアリング用判別マーカー | |
| CN113074618A (zh) | 用于车辆的控制系统 | |
| JP2018125008A (ja) | 表示装置、及び車載機器操作システム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20170202 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171116 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180109 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180406 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180511 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180807 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180820 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6398994 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R360 | Written notification for declining of transfer of rights |
Free format text: JAPANESE INTERMEDIATE CODE: R360 |
|
| R371 | Transfer withdrawn |
Free format text: JAPANESE INTERMEDIATE CODE: R371 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316354 |
|
| SZ02 | Written request for trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316Z02 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R316531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R316533 |
|
| S803 | Written request for registration of cancellation of provisional registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316803 |
|
| SZ03 | Written request for cancellation of trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R313Z03 |
|
| S343 | Written request for registration of root pledge or change of root pledge |
Free format text: JAPANESE INTERMEDIATE CODE: R316354 |
|
| SZ02 | Written request for trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R316Z02 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R316531 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R316533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |