以下、図面を参照して、本発明の実施の形態を説明する。なお、図面の寸法比率は、説明の都合上、誇張されて実際の比率とは異なる場合がある。
<第1実施形態>
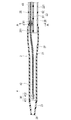
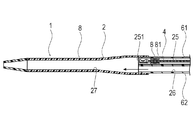
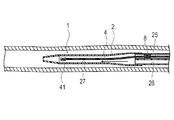
第1実施形態に係る医療用デバイス1は、図1〜4に示すように、内部に超音波診断のためのイメージングコア4を収容して生体管腔内に挿入される超音波カテーテルである。医療用デバイス1は、当該医療用デバイス1を保持してイメージングコア4を駆動させる外部駆動装置7(図7を参照)に接続されて、主として血管内を診断するために使用される。なお、本明細書では、生体の管腔に挿入する側を「先端」若しくは「先端側」、操作する手元側を「基端」若しくは「基端側」と称することとする。
医療用デバイス1は、管腔内に挿入されるシャフト部2と、管腔内組織に向けて超音波を送受信するイメージングコア4(撮像部)と、イメージングコア4が貫通しかつシャフト部2より基端側に位置するハブ5と、イメージングコア4を操作する操作部3と、マーカー8とを備えている。
シャフト部2は、シャフト先端部21と、シャフト先端部21の基端側に配置されるシャフト本体部22と、シャフト先端部21の基端側に配置される先端チップ23とを備える。
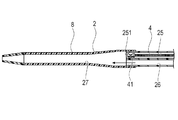
シャフト本体部22は、イメージングコア4が挿入される画像用ルーメン25と、ガイドワイヤWが挿入されるガイドワイヤルーメン26が先端側から基端側まで貫通して形成されている。シャフト本体部22は、先端側にて画像用ルーメン25およびガイドワイヤルーメン26が並んで形成されるシャフト中間部221と、シャフト中間部221から基端方向へ向かって分岐して延びる第1シャフト基端部222および第2シャフト基端部223を備えている。第1シャフト基端部222は、内部に画像用ルーメン25が形成され、第2シャフト基端部223は、内部にガイドワイヤルーメン26が形成されている。シャフト本体部22は、軸線方向の位置によって外径および内径が異なってもよい。例えば、基端側から先端側へ向かって、外径および内径をテーパ状に減少させて物性の極端な変化を生じさせないことで、高い押し込み性、通過性を実現しつつ、キンクの発生を抑制することができる。
シャフト本体部22は、画像用ルーメン25が形成される第1管体61と、ガイドワイヤルーメン26が形成される第2管体62とが熱融着(または接着)して形成されており、第1管体61および第2管体62の色が異なり、かつ内部を観察できる程度の透明度を有する。これにより、シャフト部2の内部を観察しつつ、ガイドワイヤWを、画像用ルーメン25ではなくガイドワイヤルーメン26へ選択的に挿入することができる。
シャフト先端部21は、画像用ルーメン25およびガイドワイヤルーメン26が合流する1つの共通ルーメン27(シングルルーメンともいう)が形成されている。したがって、共通ルーメン27は、ガイドワイヤルーメン26からガイドワイヤWが入り込むことが可能であるとともに、画像用ルーメン25からイメージングコア4が入り込むことが可能である。
先端チップ23は、シャフト先端部21の一部として構成され、柔軟な材料により形成されてシャフト先端部21の先端側に配置され、共通ルーメン27と連通する先端開口部28が形成される管体である。先端チップ23は、医療用デバイス1を生体管腔内で移動させる際に、接触する生体組織への負担を低減させる。
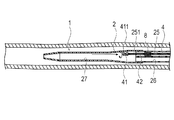
画像用ルーメン25内には、イメージングコア4がシャフト部2の軸線方向にスライド可能に配置されている。このイメージングコア4は、管腔内から生体組織に向けて超音波を送受信するための振動子ユニット41と、この振動子ユニット41を先端に取り付けるとともに回転させる駆動シャフト42とを備える。振動子ユニット41は、超音波を送受信する超音波振動子411と、超音波振動子411を収納するハウジング412とで構成されている。
シャフト先端部21は、超音波の透過性の高い材料により形成されている。シャフト先端部21は、可撓性を有する材料で形成され、その材料は、特に限定されず、例えば、スチレン系、ポリオレフィン系、ポリウレタン系、ポリエステル系、ポリアミド系、ポリイミド系、ポリブタジエン系、トランスポリイソプレン系、フッ素ゴム系、塩素化ポリエチレン系等の各種熱可塑性エラストマー等が挙げられ、これらのうちの1種または2種以上を組合せたもの(ポリマーアロイ、ポリマーブレンド、積層体等)を適用できる。
シャフト本体部22は、可撓性を有する材料で形成され、その材料は、特に限定されず、例えば、上述したシャフト先端部21に適用可能な材料を適用できる。
先端チップ23は、シャフト先端部21よりも柔軟な材料で形成され、その材料は、特に限定されず、例えば、上述したシャフト先端部21に適用可能な材料を適用できる。
駆動シャフト42は、柔軟で、しかも操作部3において生成された回転の動力を振動子ユニット41に伝達可能な特性をもち、たとえば、右左右と巻き方向を交互にしている3層コイルなどの多層コイル状の管体で構成されている。駆動シャフト42が回転の動力を伝達することによって、振動子ユニット41が回転し、血管などの管腔内の患部を周方向に亘って観察することができる。また、駆動シャフト42は、振動子ユニット41で検出された信号を操作部3に伝送するための信号線43が内部に通されている。
ハブ5は、第1シャフト基端部222に気密に連結される第1ハブ部51と、第2シャフト基端部223に気密に連結される第2ハブ部52と、第1ハブ部51および第2ハブ部52を覆うハブ用ケーシング53と、第1耐キンクプロテクタ54とを備えている。
第1ハブ部51には、イメージングコア4を操作するために外部駆動装置7に連結される操作部3が連結されている。操作部3は、第1ハブ部51に連結される外管32と、外管32の基端部に連結されるユニットコネクタ37と、外管32に対して軸線方向へ移動可能な内管34と、内管34の基端部に連結される操作基端部31とを備えている。
操作基端部31は、駆動シャフト42および内管34を保持する。操作基端部31が移動して内管34がユニットコネクタ37および外管32に押し込まれ(図1を参照)、または引き出されることによって(図8を参照)、駆動シャフト42が連動してシャフト部2内を軸線方向にスライドする。操作基端部31には、プライミングのための生理食塩液を注入するポート311が形成されている。ポート311は、画像用ルーメン25に連通している。
内管34を最も押し込んだときには、図1に示すように、内管34は、先端側の端部が外管32の内部を移動し、第1ハブ部51の付近まで到達する。そして、この状態では、振動子ユニット41は、図2に示すように、シャフト部2の共通ルーメン27の先端付近に位置する。
また、内管34を最も引き出したときには、図8に示すように、内管34は、先端に形成されたストッパー315がユニットコネクタ37の内壁に引っかかり、引っかかった先端付近以外が露出する。そして、この状態では、振動子ユニット41は、シャフト部2を残したままその内部を引き戻され、画像用ルーメン25の先端領域により構成される収容部251内に収容される。このように、振動子ユニット41は、血管などの断層画像を作成するために、共通ルーメン27および画像用ルーメン25の内部を、回転しながら軸線方向に沿って移動することができる。
操作基端部31は、ジョイント312と、駆動シャフト42の基端部に接続されたハブ側コネクタ313と、第2耐キンクプロテクタ314とを有する。
ジョイント312は、基端側に開口部を有し、ハブ側コネクタ313を内部に配置する。ハブ側コネクタ313は、ジョイント312の基端側から外部駆動装置7が有する駆動側コネクタ711(図7を参照)に連結可能であり、連結することで、外部駆動装置7とハブ側コネクタ313とが機械的および電気的に接続される。
ハブ側コネクタ313には、信号線43の一端が接続されており、この信号線43は、図2に示すように、駆動シャフト42内を通り抜けて、他端が振動子ユニット41に接続されている。外部駆動装置7から駆動側コネクタ711、ハブ側コネクタ313、信号線43を介して振動子ユニット41に送信される信号によって、振動子ユニット41から超音波が照射される。また、超音波を受けることにより振動子ユニット41で検出された信号は、信号線43、ハブ側コネクタ313、駆動側コネクタ711を介して外部駆動装置7へ伝送される。
第2耐キンクプロテクタ314は、内管34および操作基端部31の周囲に配置され、内管34のキンクを抑制する。
ユニットコネクタ37は、第1ハブ部51に取り付けられた外管32の基端部が内部に嵌合するように挿入され、この外管32の内部に、操作基端部31から伸びた内管34が挿入される。ユニットコネクタ37は、外部駆動装置9の保持部73(図7を参照)に接続可能である。
第1ハブ部51は、図1、4に示すように、基端側から外管32の先端部が嵌合して連結されるとともに、先端側から第1シャフト基端部222が挿入されて熱融着または接着して気密に連結されている。したがって、内管34および外管32を通り抜けた駆動シャフト42および生理食塩液は、第1ハブ部51を通って画像用ルーメン25へ移動可能である。第1ハブ部51の外周面には、ハブ用ケーシング53に連結するために、リング状に突出する第1連結用凸部511が形成されている。
第2ハブ部52は、先端側から第2シャフト基端部223が挿入されて熱融着または接着して気密に連結されている。したがって、第2ハブ部52は、ガイドワイヤルーメン26に連通しており、ガイドワイヤWが通過可能である。第2ハブ部52の外周面には、ハブ用ケーシング53に連結するために、リング状に突出する第2連結用凸部521が形成されている。
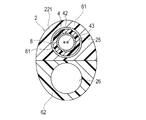
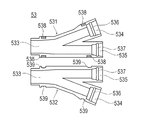
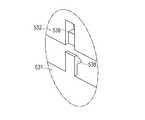
ハブ用ケーシング53は、図4〜6に示すように、シャフト本体部22、第1ハブ部51および第2ハブ部52の外周面を両側から挟むように割型構造で構成される2つの第1ケーシング531および第2ケーシング532を備えている。第1ケーシング531および第2ケーシング532は、シャフト本体部22、第1ケーシング531および第2ケーシング532を挟んで対称的な形状で形成されている。第1ケーシング531および第2ケーシング532は、シャフト本体部22が嵌合する先端側嵌合部533と、第1ハブ部51が嵌合する第1ハブ用嵌合部534と、第2ハブ部52が嵌合する第2ハブ用嵌合部535とが形成されている。
第1ハブ用嵌合部534には、第1ハブ部51の外周面に形成される第1連結用凸部511が嵌合可能な第1連結用凹部536が形成されている。第2ハブ用嵌合部535には、第2ハブ部52の外周面に形成される第2連結用凸部521が嵌合可能な第2連結用凹部537が形成されている。
第1ケーシング531および第2ケーシング532には、シャフト本体部22、第1ハブ部51および第2ハブ部52の外周面を両側から挟むように重ねることで、引っ掛かるように連結される連結用フック538および連結用段差部539が形成されている。第1ケーシング531および第2ケーシング532を重ねることで、連結用フック538が一旦撓んだ後に連結用段差部539に引っ掛かり、第1ケーシング531および第2ケーシング532が連結される。なお、第1ケーシング531および第2ケーシング532は、連結用フック538および連結用段差部539のような機械的な構造を用いずに、接着剤や熱融着により接合されてもよい。
そして、第1ハブ部51の第1連結用凸部511が第1連結用凹部536に嵌合し、かつ第2ハブ部52の第2連結用凸部521が第2連結用凹部537に嵌合した状態で、第1ケーシング531および第2ケーシング532が連結されると、第1ハブ部51および第2ハブ部52がハブ用ケーシング53に対して脱落不能に固定される。なお、第1ハブ部51およびハブ用ケーシング53は、第1連結用凸部511および第1連結用凹部536のような機械的な構造を用いずに、接着剤や熱融着により接合されてもよい。また、第2ハブ部52およびハブ用ケーシング53も、第2連結用凸部521および第2連結用凹部537のような機械的な構造を用いずに、接着剤や熱融着により接合されてもよい。
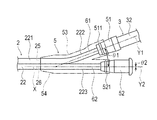
シャフト本体部22は、シャフト中間部221から基端方向に向かって第1シャフト基端部222および第2シャフト基端部223に分岐する部位が、ハブ用ケーシング53の内部に位置している。このため、第1管体61および第2管体62が接合されていないことでシャフト中間部221よりも剛性が低い第1シャフト基端部222および第2シャフト基端部223が、ハブ用ケーシング53の外に位置せず、高い押し込み性を発揮できる。
ハブ用ケーシング53内において、シャフト本体部22の基端部の軸線Xを基準線として、基準線Xに対する第1ハブ部51の中心軸Y1の傾き|θ1|は、基準線Xに対する第2ハブ部52の中心軸Y2の傾き|θ2|よりも大きい。
第1ハブ部51の傾き|θ1|を大きくし過ぎると、駆動シャフト42と第1シャフト基端部222との摩擦により、画像の回転むらが発生しやすくなる。また、イメージングコア4をプルバックする際に、断線や、イメージングコア4の移動が乱れるジャンピングによる画像むらが発生しやすくなる。したがって、傾き|θ1|は、イメージングコア4に回転むら、断線、ジャンピング等が生じない程度の角度であることが好ましい。
第2ハブ部52の傾き|θ2|を大きくし過ぎると、ガイドワイヤWと第2シャフト基端部223との摩擦により、ガイドワイヤWの操作性が低下する可能性がある。
したがって、上記の点を考慮すると、|θ1|≒0、|θ2|≒0であることが好ましいが、第1ハブ部51の中心軸Y1とハブ部52の中心軸Y2の間の角度|θ1−θ2|の値が小さくなるほど、術者によるガイドワイヤWの操作が、外部駆動装置7と干渉するため、|θ1−θ2|の値はできるだけ大きい方が好ましい。
また、ガイドワイヤWの剛性は、通常、駆動シャフト42の剛性よりかなり高いため、|θ2|≒0であることが好ましい。本実施形態では、|θ2|=0であり、|θ1|>0である。なお、|θ2|が|θ1|以上であってもよい。
そして、一般的には、ハブ内で曲がらないように配置されるべき駆動シャフト42が、本実施形態では、ハブ5内で曲がって配置される。なお、駆動シャフト42は、血管内で曲がりつつも駆動力を伝達できるように構成されているため、ハブ5内での曲がりを許容できる。そして、駆動シャフト42を収容する画像用ルーメン25が形成されている第1シャフト基端部222が、ハブ用ケーシング53内で、曲がりつつ延びて第1ハブ部51に連結されているため、ハブ用ケーシング53内で回転する駆動シャフト42の位置を適切に保持することができる。
また、ガイドワイヤWを収容するガイドワイヤルーメン26が形成されている第2シャフト基端部223が、ハブ用ケーシング53内で、第2ハブ部52に連結されているため、ハブ用ケーシング53内でガイドワイヤWの位置を適切に保持することができ、ガイドワイヤWの良好な操作が可能である。
第1耐キンクプロテクタ54は、図1に示すように、ハブ用ケーシング53の先端部およびハブ用ケーシング53から先端方向へ導出されるシャフト本体部22を囲み、シャフト本体部22のキンクを抑制する。
第1ハブ部51、第2ハブ部52、ハブ用ケーシング53、管32、内管34、ユニットコネクタ37および操作基端部31の構成材料は、特に限定されず、例えば、ポリ塩化ビニル、ポリエチレン、ポリプロピレン、環状ポリオレフィン、ポリスチレン、ポリ−(4−メチルペンテン−1)、ポリカーボネート、アクリル樹脂、アクリルニトリル−ブタジエン−スチレン共重合体、ポリエチレンテレフタレート、ポリエチレンナフタレート等のポリエステル、ブタジエン−スチレン共重合体、ポリアミド(例えば、ナイロン6、ナイロン6・6、ナイロン6・10、ナイロン12)のような各種樹脂が挙げられる。
画像用ルーメン25には、図1〜3に示すように、振動子ユニット41を収容可能な収容部251の基端側に、駆動シャフト41の回転運動および軸線方向への運動を許容しつつ流体の移動を規制するシール部材8(規制部材)が配置されている。シール部材8は、例えばOリングであり、駆動シャフト41の外周面と接触する。シール部材8は、画像用ルーメン25における流体の、先端方向および基端方向の両方への移動を規制する。シール部材8は、画像用ルーメン25内に嵌合する固定部材81によって軸線方向へ移動不能に固定されている。なおシール部材8は、流体の移動を規制できれば、Oリングでなくてもよく、例えばXリングであってもよい。
上述した医療用デバイス1は、図7に示すように、外部駆動装置7に接続されて駆動される。外部駆動装置7は、基台75上に、モータ等の外部駆動源を内蔵して駆動シャフト42を回転駆動させる駆動部71と、駆動部71を把持してモータ等により軸線方向へ移動させる移動手段72と、医療用デバイス1の一部を位置固定的に保持する保持部73とを備えている。外部駆動装置7は、駆動部71および移動手段72を制御する制御部79に接続されており、振動子ユニット41によって得られた画像は、制御部79に接続された表示部78に表示される。
移動手段72は、駆動部71を把持して固定することが可能であり、把持した駆動部71を、基台75上の溝レール76に沿って前後進させる送り機構である。
駆動部71は、医療用デバイス1のハブ側コネクタ313が接続可能な駆動用雌コネクタ711と、医療用デバイス1のジョイント312に接続可能なジョイント接続部712と、を有し、当該接続によって、振動子ユニット41との間で信号の送受信が可能となると同時に、駆動シャフト42を回転させることが可能となる。
医療用デバイス1における超音波走査(スキャン)は、図7、8に示すように、移動手段72を軸線方向へ移動させつつ、駆動部71内のモータの回転運動を駆動シャフト42に伝達し、駆動シャフト42の先端に固定されたハウジング412を回転させる。これにより、ハウジング412に設けられた超音波振動子411が長手方向に移動しつつ回転し、超音波振動子411で送受信される超音波を略径方向に走査することができる。これにより、血管内の軸方向にわたる包囲組織体における360°の断面画像を任意の位置まで走査的に得ることができる。
次に、第1実施形態に係る医療用デバイス1を用いて、血管などの生体管腔内から生体組織を観察する際の動作について説明する。
まず、医療用デバイス1のシャフト部2を管腔内に挿入する前に、当該医療用デバイス1内を生理食塩液で満たすプライミング操作を行う。プライミング操作を行うことによって、超音波振動子411から超音波で伝達可能となり、かつ医療用デバイス1内の空気を除去し、血管などの管腔内に空気が入り込むことを防止する。
プライミングを行うには、図8、9に示すように、ユニットコネクタ37から操作基端部31を基端側に最も引っ張った状態、すなわち、外管32から内管34が最も引き出された状態にし、振動子ユニット41を、画像用ルーメン25内の収容部251に収容する。次に、ガイドワイヤルーメン26が連通する第2ハブ部52の開口部に、図示しないチューブおよび三方活栓からなる器具を接続し、例えばシリンジ等を用いて、生理食塩液を注入する。注入された生理食塩液は、第2ハブ部52からガイドワイヤルーメン26内に充填されていく。ガイドワイヤルーメン26内の生理食塩液は、共通ルーメン27内に流入し、共通ルーメン27内に流入した生理食塩液は、さらに収容部251内に充填される。なお、収容部251に流入した生理食塩液は、シール部材8により基端方向への移動が規制され、画像用ルーメン25内のシール部材8よりも基端側には流入しない。
ガイドワイヤルーメン26から生理食塩液が流入する共通ルーメン27が、生理食塩液で充填されると、先端開口部28から生理食塩液が抜ける。これにより、振動子ユニット41が画像を取得するために移動する共通ルーメン27内および収容部251内の空気が、生理食塩液に置換された状態が確認され、プライミングが完了する。このように、画像用ルーメン25およびガイドワイヤルーメン26が共通ルーメン27で合流しているため、共通ルーメン27のプライミングを、ガイドワイヤルーメン26の基端側の開口部から行うことが可能である。さらに、シール部材8が設けられることで、画像用ルーメン25内の空気の共通ルーメン27への移動が抑制されるため、画像用ルーメン25内をプライミングする必要がなく、プライミング作業が容易となる。また、ガイドワイヤルーメン26からプライミングを行う場合、駆動シャフト42が存在する画像用ルーメン25からプライミングする場合よりも圧力損失が小さいため、小さな力で容易にプライミングを行うことができ、作業性に優れている。なお、振動子ユニット41を共通ルーメン27内に移動させた状態で、プライミングを行うこともできる。
次に、図7に示すように、医療用デバイス1を図示しない滅菌されたポリエチレン製の袋などで覆った外部駆動装置7に連結する。すなわち、医療用デバイス1の操作基端部31のジョイント312を、駆動部71のジョイント接続部712に接続する。これにより、振動子ユニット41と外部駆動装置7との間で信号の送受信が可能となると同時に、駆動シャフト42を回転させることが可能となる。そして、ユニットコネクタ37を保持部73に嵌合させると、連結は完了する。
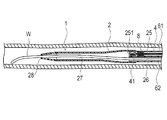
次に、セルジンガー法により経皮的に血管に挿入されたシースを介して、ガイドワイヤWを血管内に挿入する。次に、ガイドワイヤWの基端部を医療用デバイス1の先端開口部28から挿入して、共通ルーメン27を介してガイドワイヤルーメン26内に挿入する。このとき、図10に示すように、共通ルーメン27内にイメージングコア4が位置していないため、イメージングコア4の損傷を抑制できるとともに、ガイドワイヤWの移動が阻害されない。また、第1管体61および第2管体62は、色が異なり、かつ内部を観察できる程度の透明度を有するため、ガイドワイヤWを先端チップ23に形成される先端開口部28から挿入した後、シャフト部2の内部を観察しつつ、共通ルーメン27から画像用ルーメン25へ挿入することなく、ガイドワイヤルーメン26へ挿入することができる。なお、先端開口部28から挿入したガイドワイヤWを、共通ルーメン27からガイドワイヤルーメン26へ挿入する際には、シャフト部2を撓ませることで、画像用ルーメン25ではなくガイドワイヤルーメン26へ向かわせることができる。
ガイドワイヤWを第1ハブ部51から基端側へ導出させた後、医療用デバイス1をガイドワイヤWに沿って押し進め、医療用デバイス1の先端部を、観察する患部よりも奥側(先端側)に配置する。このとき、第1ハブ部51と第2ハブ部52は、異なる方向へ向いているため、操作部3や外部駆動装置7に干渉されずに、術者がガイドワイヤWを操作することができる。また、ガイドワイヤルーメン26が、手元の第2ハブ部52で開口しているため、シースから漏れる血液により濡れず、ガイドワイヤWを交換することが容易である。このため、任意の荷重・形状を持つガイドワイヤWを使い分けることにより、複雑な部位の深部に効率的に医療用デバイス1を到達させることが可能である。また、ガイドワイヤルーメン26が、手元の第2ハブ部52で開口しているため、ガイドワイヤルーメン26を介して、造影剤や薬剤を供給し、先端開口部28から生体内へ放出することもできる。
次に、図11に示すように、血管内でシャフト部2を移動しないように保持しつつ、ガイドワイヤWの先端がガイドワイヤルーメン26に収容されるまで、ガイドワイヤWを基端方向へ移動させる。このとき、ガイドワイヤWをガイドワイヤルーメン26から完全に引き抜いてもよい。ガイドワイヤWをガイドワイヤルーメン26から完全に引き抜いても、ガイドワイヤルーメン26が手元の第2ハブ部52で開口しているため、再びガイドワイヤWを挿入することができる。
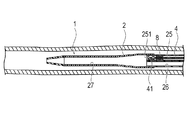
この状態で、シャフト部2を移動しないように保持しつつ、駆動部71を基台75上の溝レール76に沿って先端側に動かすことで(図7を参照)、操作基端部31を先端側へ移動させ、外管32に内管34が最も押し込まれた状態とする。これにより、図12に示すように、イメージングコア4は、共通ルーメン27の先端側に移動する。このとき、ガイドワイヤWが共通ルーメン27内に存在しないため、イメージングコア4の損傷を抑制できるとともに、イメージングコア4の動作がガイドワイヤWによって阻害されない。また、駆動シャフト42は、画像用ルーメン25内をシール部材8に接触しつつ先端方向へ移動するため、画像用ルーメン25内の空気が、共通ルーメン27内に移動することを抑制できる。
次に、図13に示すように、駆動シャフト42を駆動部71により回転させながらプルバック操作することで、超音波振動子411をラジアル走査しつつ患部よりも基端側へ軸線方向に沿って移動させて、管腔の軸線方向に沿って、患部を含む生体組織の断層画像を連続して取得する。
この後、医療用デバイス1を血管内から引き抜き、医療用デバイス1の操作が完了する。
以上のように、第1実施形態に係る医療用デバイス1は、画像用ルーメン25内の振動子ユニット41(撮像部)よりも基端側に、駆動シャフト42の回転運動および軸線方向への運動を許容しつつ流体の移動を規制するシール部材8が配置されており、画像用ルーメン25の先端側に、画像用ルーメン25およびガイドワイヤルーメン26と連通する共通ルーメン27が形成されている。このため、ガイドワイヤルーメン26のハブ5側の開口部からプライミングを行うことで、シール部材8により画像用ルーメン25内から共通ルーメン27内への気体の移動を規制しつつ、振動子ユニット41が移動する共通ルーメン27内を生理食塩液に置換することが容易となり、プライミングを効率よく行うことが可能となる。
また、シール部材8が、画像用ルーメン25の先端部にて共通ルーメン27と連通するとともに振動子ユニット41(撮像部)を収容可能な収容部251よりも基端側に配置されるため、ガイドワイヤWを共通ルーメン27に挿入する際に、振動子ユニット41を収容部251へ収容して振動子ユニット41の損傷を抑制できるとともに、ガイドワイヤWの操作性を維持できる。
また、画像用ルーメン25内に、先端側および基端側からの流体の流れを規制するシール部材8が設けられるため、シール部材8によって画像用ルーメン25内から共通ルーメン27内への気体の移動をより確実に規制し、振動子ユニット41への気泡の付着をより確実に抑制できる。
<第2実施形態>
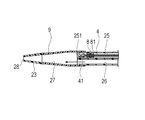
第2実施形態に係る医療用デバイスは、シャフト先端部の形態のみが、第1実施形態と異なる。なお、第1実施形態と同一の機能を有する部位には、同一の符号を付し、説明を省略する。
第2実施形態に係る医療用デバイスのシャフト先端部9は、図14に示すように、第1実施形態におけるシャフト先端部21よりも、軸線方向の長さが短い。このような構成とすることで、ガイドワイヤルーメン26のハブ5側の開口部からのプライミングがより容易となり、振動子ユニット41への気泡の付着をより確実に抑制できる。また、駆動シャフト42の軸線方向への移動範囲が短くなることで、シール部材8により画像用ルーメン25内から共通ルーメン27への気体の移動をより効果的に抑制できる。なお、振動子ユニット41を共通ルーメン27の先端側に移動させた状態で、プライミングを行うこともできる。この場合、共通ルーメン27が短いため、振動子ユニット41が、プライミングを行うガイドワイヤルーメン26から近い位置となり、振動子ユニット41への気泡の付着をより確実に抑制でき、より効率的なプライミングが可能となる。
<第3実施形態>
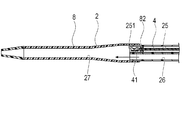
第3実施形態に係る医療用デバイスは、規制部材の形態のみが、第1実施形態と異なる。なお、第1実施形態と同一の機能を有する部位には、同一の符号を付し、説明を省略する。
第3実施形態に係る医療用デバイスの規制部材は、図15に示すように、流体の先端方向への移動を制限し、基端方向への移動を許容する逆止弁82である。逆止弁82は、画像用ルーメン25内から共通ルーメン27への気体の移動を規制しつつ、共通ルーメン27内から画像用ルーメン25への生理食塩液の流入を許容するように構成されている。このような構成とすることで、ガイドワイヤルーメン26のハブ5側の開口部からのプライミングを行うと、共通ルーメン27へ流入した生理食塩液が、逆止弁82を通って画像用ルーメン25へ流入し、画像用ルーメン25内の気体が生理食塩液に置換される。このため、画像用ルーメン25内から共通ルーメン27への気体の移動をより確実に抑制し、振動子ユニット41への気泡の付着をより確実に抑制できる。なお逆止弁の位置は、画像用ルーメン25内の先端側に限定されず、任意の位置に設置することができる。
<第4実施形態>
第4実施形態に係る医療用デバイスは、規制部材の形態のみが、第1実施形態と異なる。なお、第1実施形態と同一の機能を有する部位には、同一の符号を付し、説明を省略する。
第4実施形態に係る医療用デバイスは、図16に示すように、画像用ルーメン25内に、規制部材が設けられていない。ただし、操作基端部31のポート311(図1を参照)に、図示しないチューブおよび三方活栓からなる器具など(規制部材)を接続して密封する。このような構成とすることで、ガイドワイヤルーメン26のハブ5側の開口部からプライミングする際に、画像用ルーメン25内の内圧により、共通ルーメン27から画像用ルーメン25へ生理食塩液がほとんど流入しない。しかしながら、同時に、画像用ルーメン25内の気体の共通ルーメン27への移動も制限されるため、振動子ユニット41への気泡の付着を極力抑制することができる。
なお、本発明は、上述した実施形態のみに限定されるものではなく、本発明の技術的思想内において当業者により種々変更が可能である。例えば、上記実施の形態では、本発明を超音波カテーテルに適用する場合について説明したが、光干渉断層診断装置(OCT:Optical Coherence Tomography)や光学周波数領域画像化診断装置(OFDI:Optical Frequency Domain Imaging)などの光を利用して画像を取得する装置に適用することも可能である。