以下に、本発明の好ましい実施形態を添付の図面に基づいて詳細に説明する。
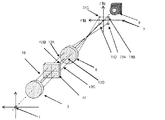
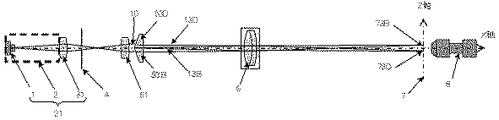
図1は本発明の第1の実施例の走査光学系用光源ユニットの調整装置の断面図、図2は斜視図である。
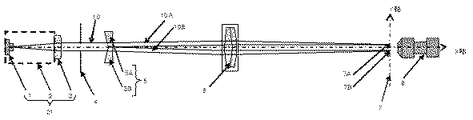
本実施例の調整装置は、偏向器を有する光走査装置に搭載される光源ユニットのレーザ光源と集光光学素子の相対的な位置関係を調整する調整装置であって、図1と図2に示すように、調整対象であるレーザ光源1及び集光光学素子としての集光レンズ3を含む光源ユニット21を固定するための取り付け部(不図示)、絞り(第2の絞り)4、瞳分割素子5、結像光学素子である工具レンズ6、受光センサ(受光素子)としての2次元CCDカメラ8により構成される。座標系は光軸がX軸、X軸に直交する面にY軸とZ軸を設ける。
本実施例の調整装置の構成を図1と図2を用いて説明する。
レーザ光源1および集光レンズ3は保持部材としてのレーザホルダ2によって保持されて走査光学系用の光源ユニット21を構成する。光源ユニット21は不図示の取り付け部により本実施例の調整装置に着脱可能である。レーザホルダ2に対し集光レンズ3が固定されて調整装置に装着される。レーザ光源1は、調整機構である不図示の工具ハンドにより保持され、レーザホルダ2(集光レンズ3)に対して3次元的に変位可能な構成を有する。後述する本件の調整方法によりレーザ光源1の位置を微調整して、集光レンズ3に対するレーザ光源1の相対位置を3次元的に所望の精度に追い込んだ後、レーザ光源1はレーザホルダ2に固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
絞り4はY方向に長軸をもつ楕円の穴を開けたプレートである。楕円開口を有する絞り4により光束10は楕円形状となり、Y方向に最大径となる。
瞳分割素子(分割素子)5は、プリズム5Aとプリズム5BをY方向に配列して構成されるプリズムアレイからなる。したがって、プリズムの配列方向は、光束の最大径方向と一致する。プリズム5Aとプリズム5Bは光軸を含むXZ平面に対して対称な形状となっている。図1及び図2では入射面はYZ平面に対して傾斜しており、出射面はYZ平面に対して平行な一つの平面から構成されている。図1及び図2では入射面の傾斜が光軸側の肉厚が薄くなるような傾斜であるが、逆に光軸側の肉厚が厚くなるような傾斜であってもよい。
工具レンズ6は入射したビームを像面7(受光素子上)に集光してビームスポット7Aと7Bを形成する。像面7に形成されたビームスポットは受光センサとしてのCCDカメラ8により画像として取込まれる。CCDカメラ8は対物レンズと受光画素が2次元的に配列されたCCDセンサから構成されている。不図示の画像処理システムは、CCDカメラ8により画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかを算出する。演算処理されたビームスポットのYZ座標に基づき、レーザ光源1を保持する不図示の工具ハンドを駆動制御することにより、レーザ光源と集光光学素子の相対位置を調整する。
より具体的な作用について図1と図2を用いて説明する。なお簡単のために図1では光束のマージナル光線のみを記載し、図2では光線の主光線のみを記載する。
光源ユニット21が不図示の取り付け部により本発明の調整装置に取り付けられ、レーザ光源1を点灯すると、レーザ光源1より出射したレーザビームは集光レンズ3により集光される。集光レンズ3の前側焦点位置にレーザ光源1を一致させることにより、レーザビームは平行光束に変換される。平行光束が所望の平行度となるためには集光レンズ3の前側焦点位置とレーザ光源1との光軸(X)方向の位置ズレの許容度は±0.050mm、より好ましくは±0.020mm以下に合わせる必要がある。また同様に集光レンズ3の光軸に対し、レーザ光源1が垂直方向(Y方向やZ方向)に大幅にずれると光走査装置の印字位置精度に影響を及ぼす。Y方向やZ方向の位置ズレの許容度は±0.100mm、より好ましくは±0.030mm以下に合わせる必要がある。
しかし光源ユニット21の組み立て時点では、光軸(X)方向、Y方向やZ方向において、この所望の精度で配置することは一般的に困難であり、組み立て後に微調整を行う必要がある。
集光レンズ3から出射した光束は、楕円開口を有する絞り4により光軸に対して垂直な断面において楕円状の光束10として制限されて(成形されて)使用される。調整装置において光源ユニット21の集光レンズ3から絞り4までの光軸方向の距離は、光走査装置内における集光レンズ3から絞り(第1の絞り)までの光軸方向の距離に一致させることが望ましい。もしくはこれと光学的に等価な位置に設定するとよい。
絞り4を通過した光束10は瞳分割素子5を構成するプリズム5Aとプリズム5Bに入射する。図1からわかるように光束10はY方向に2分割され、瞳プラス側の光束10Aと瞳マイナス側の光束10Bに分割される。瞳プラス側の光束10Aがプリズム5AによりY方向プラス側へ屈折し、瞳マイナス側の光束10Bがプリズム5BによりY方向マイナス側へ屈折する。
次に工具レンズ6に入射した光束10Aと光束10Bは、工具レンズ6によって結像作用を受け、工具レンズ6の像面7にビームスポット7Aと7Bを形成する。
像面7上のビームスポット7Aと7BはCCDカメラ8により画像として取込まれる。不図示の画像処理システムにより、画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。
理想状態で(設計位置に)レーザ光源1と集光レンズ3が配置され、集光レンズ3から射出されるレーザビームが所望の平行度の平行光束であるならば、像面7上における光軸上の点をYZ平面の原点(0,0)として表すと、ビームスポット7Aと7Bは像面7のY軸上でそれぞれ(+Yo、0)、(−Yo、0)の位置に結像するものとする。このとき、実際のレーザ光源1と集光レンズ3の相対位置がずれた場合に、ビームスポット7Aと7Bがどのように観測されるかを説明する。
まず、レーザ光源1と集光レンズ3とのX方向における距離が理想状態よりΔXだけ短い場合は、集光レンズ3から出射した光束10は発散気味の光束となる。図1からわかるように光束10が発散光束だと瞳分割素子5によって分割された光束10AはX軸からより遠ざかりY方向プラス側に変位する。このため工具レンズ6に入射した光束10AもX軸からより遠ざかりY方向プラス側に変位して集光されるため、像面7上のビームスポット7Aの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット7Aは像面7上で、(+Yo+dY、0)の位置にビームスポットとして観測される。
同様に光束10が発散光束だと瞳分割素子5によって分割された光束10BはX軸からより遠ざかりY方向マイナス側に変位する。このため工具レンズ6に入射した光束10BもX軸からより遠ざかりY方向マイナス側に変位して集光されるため、像面7上のスポット7Bの位置もマイナス側に変位する。この変位量を−dYとすると、ビームスポット7Bは像面7上で、(−Yo−dY、0)の位置にビームスポットとして観測される。
よって、レーザ光源1と集光レンズ3とのX方向における距離が理想状態よりΔXだけ短い場合は、ビームスポット7Aと7Bの間隔は2×dY広がって観察される。
次にレーザ光源1が集光レンズ3に対してY方向に理想状態よりΔY<0だけ移動した(Y軸方向マイナス側へ移動した)場合は、集光レンズ3から射出された光束10はY方向プラス側へ向かう角度を持つ。図1からわかるように光束10がY方向プラス側へ向かう角度を持つと瞳分割素子5によって分割された光束10AもY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束10AもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット7Aの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット7Aは(+Yo+dY、0)の位置にビームスポットとして観測される。
同様に光束10がY方向プラス側へ向かう角度を持つと瞳分割素子5によって分割された光束10BもY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束10BもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット7Bの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット7Bは(−Yo+dY、0)の位置にビームスポットとして観測される。
よってレーザ光源1が集光レンズ3に対してY方向に理想状態よりΔY<0だけ移動した場合は、ビームスポット7Aとビームスポット7Bの間隔は変化なく、そろってY方向にdYだけ変位して観察される。
次にレーザ光源1が集光レンズ3に対してZ方向に理想状態よりΔZ<0だけ移動した(Z軸方向マイナス側へ移動した)場合は、集光レンズ3から射出された光束10はZ方向プラス側へ向かう角度を持つ。図2からわかるように光束10がZ方向プラス側へ向かう角度を持つと瞳分割素子5によって分割された光束10AもZ方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束10AもZ方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット7Aの位置もプラス側に変位する。この変位量をdZとすると、ビームスポット7Aは(+Yo、dZ)の位置にビームスポットとして観測される。
同様に光束10がZ方向プラス側へ向かう角度を持つと瞳分割素子5によって分割された光束10BもZ方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束10BもZ方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット7Bの位置もプラス側に変位する。この変位量をdZとすると、ビームスポット7Bは(−Yo、dZ)の位置にビームスポットとして観測される。
よってレーザ光源1が集光レンズ3に対してZ方向に理想状態よりΔZ<0だけ移動した場合は、ビームスポット7Aとビームスポット7Bの間隔は変化なく、そろってZ方向にdZだけ変位して観察される。
レーザ光源1と集光レンズ3の相対位置の変化量に対してビームスポット7Aと7Bの間隔(2つのビームの像間の相対位置)や位置(2つのビームの像各々の光軸に対する位置)の変化量は、後述の数値実施例のようにリニアな比例関係がある。従ってビームスポット7Aと7Bの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光レンズ3の相対位置が理想状態に対してどれだけずれているか算出可能である。
本発明では像面7上のビームスポット7Aと7BをCCDカメラ8により画像として取込む。不図示の画像処理システムにより、画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。2次元CCDセンサ上のスポットの重心位置座標を算出する方法は既知の方法でよい。
算出されたビームスポット7Aと7BのYZ平面内の座標を(YA、ZA)、(YB、ZB)とする。装置に製造誤差がなければZA=ZBとなるが、実際は製造誤差があるのでZA≒ZBである。また理想状態(設計位置)の座標を(+Yo、0)、(−Yo、0)とする。
また、レーザ光源1と集光レンズ3の相対的な位置ズレに対するビームスポット7Aと7Bの座標変位敏感度を、
Ax=ピント(X方向)ズレ / ビームスポットY方向ズレ量 (1)
Ay=Y方向ズレ / ビームスポットY方向ズレ量 (2)
Az=Z方向ズレ / ビームスポットZ方向ズレ量 (3)
とする。これらはシミュレーションにより求めても、実験により求めてもよい。この座標変位敏感度を用いて、レーザ光源1と集光レンズ3のX、Y,Z方向相対位置ズレ量(ΔX、ΔY、ΔZ)は、それぞれ、
レーザ光源1と集光レンズ3のX方向相対位置ズレ量ΔX
=Ax×((YA−YB)−2×Yo) (4)
レーザ光源1と集光レンズ3のY方向相対位置ズレ量ΔY
=Ay×(YA+YB)/2 (5)
レーザ光源1と集光レンズ3のZ方向相対位置ズレ量ΔZ
=Az×(ZA+ZB)/2 (6)
と表せる。
X方向相対位置ズレ量ΔXはビームスポット7Aと7Bの距離が理想状態の距離からどの程度変位しているか差分をとり算出している。Y方向ズレはビームスポット7A,7Bが理想状態からY方向へどの程度変位しているか差分をとり、平均して算出している。Z方向ズレはビームスポット7A,7Cが理想状態からZ方向へどの程度変位しているか差分をとり平均して算出している。
算出されたΔX、ΔY、ΔZに基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光レンズ3の相対位置を所望の精度に追い込んだ後、レーザ光源1はレーザホルダ2に対して固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
この調整方法をアルゴリズムとしてまとめたものを図3に示す。図3に示す通り、各ビームスポットのプロファイルの読み込みは1度でよく、そこから算出された重心位置座標により、ピントずれ量ΔX、照射位置ズレΔY、ΔZを一回の測定結果のみから算出することが可能である。したがって本発明においては、比較例の図20を用いて例示したような、レンズやレーザ光源の位置を移動させて複数の位置条件における各ビームスポットのプロファイルを繰り返し読み込んでスポット径を算出する必要がない。
座標変位敏感度AyとAzは集光レンズ3の焦点距離と工具レンズ6の焦点距離によって決まるので所望の敏感度を得るために、調整対象である光源ユニットの集光レンズ3に応じて工具レンズ6の焦点距離を最適化すればよい。敏感度を高めて検知精度を上げるためには工具レンズ6の焦点距離を長くすればよい。
座標変位敏感度Axは集光レンズ3の焦点距離と工具レンズ6の焦点距離および光束10の光束幅で決まる。敏感度を高めて検知精度を上げるためには光束幅が広いほうが好ましく、瞳分割素子5を構成するプリズム5Aとプリズム5Bの配列方向を光束10の最大径方向と一致させるとよい。
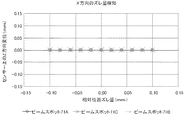
この理由を図4A、図4Bを用いて説明する。
図4Aは図1を誇張して記載している。図4A中の参照符号は図1と同じである。図4A,4Bではレーザ光源1が設計位置より集光レンズ3に近づいてレーザ光源1’になった場合の光路を破線で示している。また図中に示したY方向が瞳の最大径方向であり、瞳の最大径方向の光束幅をHとする。またに瞳の最大径の方向に瞳分割素子5A、5Bが配列している。図4A中では、簡単のために前記瞳分割素子5B側の光束の記載は省略している。レーザ光源が集光レンズ3に近づいたことで集光レンズ3を出射する光線は若干発散気味となる。このため瞳分割素子5Aを通過した光束10Aに対応する像面7上のビームスポット7Aは7A’へと変位している。
図4Bは、図4Aのレーザ光源1,1’と集光レンズ3の部分の拡大図であり、詳細に説明する図である。レーザ光源1、1’と集光レンズ3、及び、光束10Aの中心光束(実線がレーザ光源1、破線がレーザ光源1’)のみを示している。集光レンズ3の前側焦点距離Fの位置(理想状態、設計位置)にレーザ光源1が設けられている。工具レンズ6の焦点距離はFjとする。レーザ光源1が光軸にそってdXずれた位置にレーザ光源1’が実際に組み付けられたとする。集光レンズ3での中心光束と光軸の距離はH/4である。また図4Bに示すように、レーザ光源1’の位置における、レーザ光源1から出射した中心光束の光軸からの距離Δを定義し、レーザ光源1’およびレーザ光源1から出射した2つの中心光束の相対角度をεとする。このとき、
Δ=(F-dX)×ε≒F×ε (7)
と示せる。また図4Bの相似関係から
(H/4)/F=Δ/dX (8)
と示せる。式(7)及び(8)から
ε≒Δ/F=dX×H/(4×F2) (9)
と示せる。更に2つの中心光束が相対角度εで工具レンズ6に入射することからビームスポット7Aと7A’の間隔dYは、
dY=Fj×ε≒Fj×dX×H/(4×F2) (10)
と示すことができる。この式によれば、dYはHに比例しており、Hが大きいほど、つまり光束の瞳径が大きいほど、dYが大きく変動し敏感度が高くなることがわかる。従って、瞳分割素子5を構成するプリズム5Aと5Bの配列方向を光束10の最大径の方向と一致させるとよい。
また、式(10)を変形すれば、
dX≒dY×(4×F2)/H/Fj (11)
となり、式(1)で定義した座標変位敏感度Axは、
Ax≒(4×F2)/H/Fj (12)
と近似的に示すことができる。
つぎに図1で設計値どおりの配置の場合、瞳分割素子5で分離された光束10Aと10Bの2つの光束の相対角度をP(rad)とする。このとき、像面7上のスポット7Aと7Bの相対距離2Yoは、工具レンズ6の焦点距離Fjを用いて、
2Yo=P×Fj (13)
と示せる。
一方レーザ光源と集光光学素子が組立上生じる光軸方向の最大ズレ量の絶対値をXmaxとするとき、スポット7Aと7Bの位置はそれぞれ、
dY≒±Fj×Xmax×H/(4×F2) (14)
だけ変位するので、スポット7Aと7Bの相対距離の変位は
±Fj×Xmax×H/(4×F2)×2 (15)
の範囲で変動すると予測できる。従って、設計値どおりの配置の場合のスポット7Aと7Bの相対距離(式(13))と、組立上生じるスポット7Aと7Bの相対距離の変位(式(15))をきちんと設定しないとスポット7Aと7Bの順番が入れ替わってしまい、光軸方向のズレ労の算出が困難になる。そこで本発明では
2Yo=P×Fj > Fj×Xmax×H/(4×F2)×2 (16)
さらには、スポット7Aと7Bスポット径Spを勘案して、
2Yo+Sp=P×Fj+Sp > Fj×Xmax×H/(4×F2)×2 (17)
となるように設定する。
なお本実施例では先に集光レンズ3を固定しレーザ光源1を微調整したが、これとは逆にレーザ光源1を先に固定し集光レンズ3の位置を微調整してもよい。
理想的な配置でのビームスポットの座標はシミュレーションにより求めてもよいし、現物にあわせて作成したマスター光源ユニットでのビームスポットの座標を用いてもよい。
受光センサとして対物レンズと2次元CCDセンサからなるCCDカメラを示したが必ずしもこれに限るものではない。受光したビームスポットの重心位置座標を算出できれば既知の方式でよい。たとえば像面7に直接センサ受光面を置くとか、CMOSセンサを使用するとか、1次元ラインセンサを利用するなど様々な変形例で対応可能である。また瞳分割素子5のプリズムの角度の設定によりビームスポット7Aと7Bの間隔が広がり1台のセンサで受光できない場合は2台の受光センサを利用してもよいし、1台の受光センサを移動ステージに載せ、ビームスポット7Aと7Bの画像を順番に読み込んでもよい。また本実施例では集光レンズ3により平行光束を得る光源ユニットを想定したがこれに限られることなく、収束光束や発散光束を得る光源ユニットへも適応可能である。またレーザ光源ユニットを走査光学系に作り込むケースにも本件の瞳分割素子や工具レンズなどの光学系を応用することができる。
またプリズム5Aとプリズム5Bの入射面または出射面の少なくとも一方を平面ではなく同一の曲率を有する曲面を配列したレンズアレイとすることで工具レンズ6のパワーを軽減させるかもしくは工具レンズ6そのものを省略することができる。
さらに、本実施例においては、瞳分割素子5は、入射面がYZ平面に対して傾斜し、出射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイとして例示したが、本発明はこれに限定されることはない。出射面がYZ平面に対して傾斜し、入射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。つまり、入射面と出射面の内の一方がYZ平面に対して傾斜し、他方がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。
[数値実施例1]
次に、図1と図2に示した第1の実施例に係る調整装置の数値実施例を示す。
光学系の配置は表1に示すとおりである。表中、Rは面の曲率半径、dは第n面と第(n+1)面間の間隔、Nは屈折率を示す。
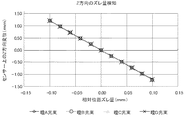
図5A〜5Fに、数値実施例1において、集光レンズ3に対してレーザ光源1が相対的に位置ズレを生じたときにビームスポット7Aと7Bの座標がどのように変位するかを示す。
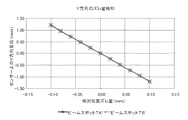
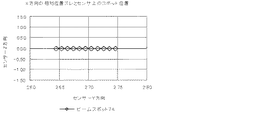
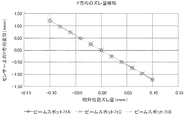
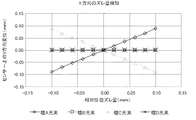
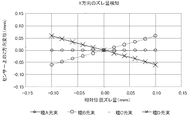
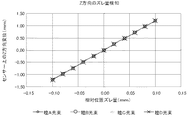
図5Aと図5Bに、集光レンズ3に対してレーザ光源1が相対的にX方向にずれた時のビームスポット7Aと7BのY座標及びZ座標の変位量を示す。相対位置ズレがマイナスの場合は、集光レンズ3とレーザ光源1の間隔が開く方向であることを示す。図5Aからわかるように集光レンズ3とレーザ光源1の間隔が変化するとビームスポット7Aと7BはY方向を逆方向に変位する。また。図5Bからわかるように集光レンズ3とレーザ光源1の間隔が変化するとビームスポット7Aと7BはZ方向に変位しない。図5AからわかるようにAx=0.1mm/0.102mmである。
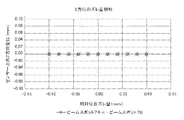
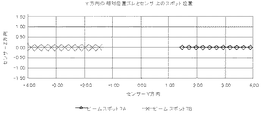
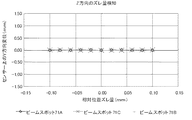
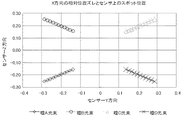
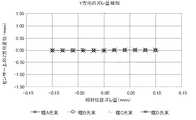
次に図5Cと図5Dは集光レンズ3に対してレーザ光源1が相対的にY方向にずれた時のビームスポット7Aと7BのY座標及びZ座標の変位量を示している。図5Cからわかるように集光レンズ3とレーザ光源1が相対的にY方向に変化するとビームスポット7Aと7BはY方向を同じ方向に変位する。また。図5Dからわかるように集光レンズ3とレーザ光源1が相対的にY方向に変化するとビームスポット7Aと7BはZ方向に変位しない。図5CからわかるようにAy=0.1mm/1.21mmである。
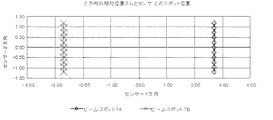
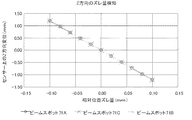
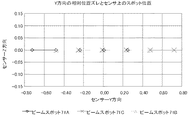
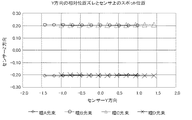
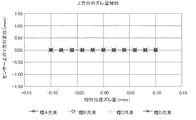
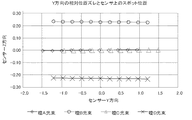
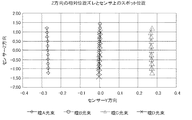
次に図5Eと図5Fは集光レンズ3に対してレーザ光源1が相対的にZ方向にずれた時のビームスポット7Aと7BのY座標及びZ座標の変位量を示している。図5Eからわかるように集光レンズ3とレーザ光源1が相対的にZ方向に変化するとビームスポット7Aと7BはY方向に変位しない。また。図5Fからわかるように集光レンズ3とレーザ光源1が相対的にZ方向に変化するとビームスポット7Aと7BはZ方向を同じ方向に変位する。図5FからわかるようにAz=0.1mm/1.21mmである。
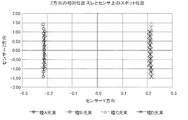
次に図5A〜5Fでの変位に対して、像面7上のYZ平面上でビームスポット7Aと7Bの軌跡をプロットしたものを図5G〜5Jに示す。
図5G,5Hは集光レンズ3に対してレーザ光源1が相対的にX方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。この場合、YZ平面上でのビームスポットはY方向を逆方向に変位する。
図5Iは集光レンズ3に対してレーザ光源1が相対的にY方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。この場合、YZ平面上でのビームスポットはY方向を同じ方向に変位する。
図5Jは集光レンズ3に対してレーザ光源1が相対的にZ方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。この場合、YZ平面上でのビームスポットはZ方向を同じ方向に変位する。
以上のように、レーザ光源1と集光レンズ3の相対位置の変化量に対してビームスポット7Aと7Bの間隔や位置の変化量は、リニアな比例関係がある。従ってビームスポット7Aと7Bの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光レンズ3の相対位置が理想状態に対してどれだけずれているか算出可能である。
上述した式(4)乃至(6)により算出されたΔX、ΔY、ΔZに基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光レンズ3の相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。またマルチビームのレーザ光源ユニットに適用できることは言うまでもない。
本発明の構成では、従来のようにビームスポット画像を読み込んでスポット径やピーク光量を算出するという工程を何度も回数を繰り返す必要がなく、1度ビームスポット画像を読み込んで演算処理することで3次元的な相対位置ずれ量を算出することが可能である。
また組み立てた光源ユニットのピントなどを再確認する際も少ない工数で確認できる。これにより組立工数を大幅に削減し低コストが可能となる。
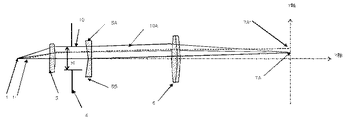
図6は本発明の第2の実施例の走査光学系用光源ユニットの調整装置の断面図、図7は斜視図である。
本実施例の調整装置は、第1の実施例の調整装置と同様の構成を有するが、第1の実施例の調整装置の瞳分割素子5に対し、本実施例では瞳分割素子51が用いられていることが異なる。
本実施例の調整装置の構成を図6と図7を用いて説明する。本実施例の調整装置の構成は、第1の実施例と瞳分割素子51を除いて同じであるので、重複する構成に関する説明は省略する。
瞳分割素子(分割素子)51は、プリズム51Aと平行平板部51Bとプリズム51CをY方向に配列して構成される。プリズム51Aとプリズム51Cは互いにXZ平面に対して対称な形状となっている。図6及び図7ではプリズム51Aとプリズム51Cの入射面がYZ平面に対して傾斜しており、出射面がYZ平面に対して平行な1つの面から構成されている。図6及び図7ではプリズム51Aとプリズム51Cの入射面の傾斜が光軸側の肉厚が薄くなるような傾斜であるが、逆に光軸側の肉厚が厚くなるような傾斜であってもよい。
瞳分割素子51を構成するプリズム51Aと平行平板部51Bとプリズム51Cの配列方向はY方向であり、光束10の最大径方向と一致させている。
工具レンズ6は入射したビームを像面7に集光してビームスポット71A,71B,71Cを形成する。像面7に形成されたビームスポットは受光センサとしてのCCDカメラ8により画像として取込まれる。CCDカメラ8は、対物レンズと受光画素が2次元的に配列されたCCDセンサから構成されている。CCDカメラ8により画像として取込まれたビームスポットは、不図示の画像処理システムにより各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。演算処理されたビームスポットのYZ座標に基づき、レーザ光源1を保持する不図示の工具ハンドを駆動制御する。
より具体的な作用について図6と図7を用いて説明する。なお簡単のために図6では光束のマージナル光線のみを記載し、図7では光線の主光線のみを記載する。本実施例の調整装置の構成は、第1の実施例と瞳分割素子51を除いては同じであるので、レーザ光源を出射してから瞳分割素子51に入射するまでの光路に関する説明は省略する。
絞り4を通過した光束10は瞳分割素子51を構成するプリズム51Aと平行平板部51Bとプリズム51Cに入射する。図6からわかるように光束10はY方向に3分割され、瞳プラス側の光束11Aと瞳中央の光束11Bと瞳マイナス側の光束11Cに分割される。瞳プラス側の光束11Aがプリズム51AによりY方向プラス側へ屈折し、瞳マイナス側の光束11Cがプリズム51CによりY方向マイナス側へ屈折する。瞳中央の光束11Bはそのまま平行平板51Bを透過する。
次に工具レンズ6に入射した光束11A、11B、11Cは、工具レンズ6に結像作用を受け、工具レンズ6の像面7にビームスポット71A,71B,71Cを形成する。
像面7上のビームスポット71A,71B,71CはCCDカメラ8により画像として取込まれる。不図示の画像処理システムにより、画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。
理想状態で(設計位置に)レーザ光源1と集光レンズ3が配置され、集光レンズ3から射出されるレーザビームが所望の平行度の平行光束であるならば、像面7上における光軸上の点をYZ平面の原点(0,0)として表すと、ビームスポット71A,71B,71Cは像面7のY軸上でそれぞれ(+Yo、0)、(0,0)、(−Yo、0)の位置に結像する。
レーザ光源1と集光レンズ3の相対位置がずれた場合にビームスポット71A,71B,71Cがどのように観測されるかを説明する。
まずレーザ光源1と集光レンズ3との距離が理想状態よりX方向においてΔXだけ短い場合は、集光レンズ3から出射した光束10は発散気味の光束となる。図6からわかるように光束10が発散光束だと瞳分割素子51によって分割された光束11AはX軸からより遠ざかりY方向プラス側に変位する。このため工具レンズ6に入射した光束11AもX軸からより遠ざかりY方向プラス側に変位して集光されるため、像面7上のビームスポット71Aの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット71Aは(+Yo+dY、0)の位置にビームスポットとして観測される。
同様に光束10が発散光束だと瞳分割素子51によって分割された光束11CはX軸からより遠ざかりY方向マイナス側に変位する。このため工具レンズ6に入射した光束11CもX軸からより遠ざかりY方向マイナス側に変位して集光されるため、像面7上のスポット71Cの位置もマイナス側に変位する。この変位量を-dYとすると、ビームスポット71Cは像面7上で、(−Yo−dY、0)の位置にビームスポットとして観測される。
よってレーザ光源1と集光レンズ3とのX方向における距離が理想状態よりΔXだけ短い場合は、ビームスポット71Aと71Cの間隔は2×dY広がって観察される。
一方、光束10が発散光束だと瞳分割素子51によって分割された光束11Bは光束11Aや光束11Cのような変位は生じず、(0,0)の位置にビームスポットとして観測される。
次にレーザ光源1が集光レンズ3に対してY方向に理想状態よりΔY<0だけ移動した(Y軸方向マイナス側へ移動した)場合は、集光レンズ3から射出された光束10はY方向プラス側へ向かう角度を持つ。図6からわかるように光束10がY方向プラス側へ向かう角度を持つと瞳分割素子51によって分割された光束11AもY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束11AもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット71Aの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット71Aは(+Yo+dY、0)の位置にビームスポットとして観測される。
同様に光束10がY方向プラス側へ向かう角度を持つと瞳分割素子51によって分割された光束11BもY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束11BもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット71Bの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット71Bは(+dY、0)の位置にビームスポットとして観測される。
同様に光束10がY方向プラス側へ向かう角度を持つと瞳分割素子51によって分割された光束11CもY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束11CもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット71Cの位置もプラス側に変位する。この変位量をdYとすると、ビームスポット71Cは(−Yo+dY、0)の位置にビームスポットとして観測される。
よってレーザ光源1が集光レンズ3に対してY方向に理想状態よりΔY<0だけ移動した場合は、ビームスポット71A,71B,71Cの間隔は変化なく、そろってY方向にdYだけ変位して観察される。
次にレーザ光源1が集光レンズ3に対してZ方向に理想状態よりΔZ<0だけ移動した(Z軸方向マイナス側へ移動した)場合は、集光レンズ3から射出された光束10はZ方向プラス側へ向かう角度を持つ。図7からわかるように光束10がZ方向プラス側へ向かう角度を持つと瞳分割素子51によって分割された光束11AもZ方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束11AもZ方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット71Aの位置もプラス側に変位する。この変位量をdZとすると、ビームスポット71Aは(+Yo、dZ)の位置にビームスポットとして観測される。
同様に光束10がZ方向プラス側へ向かう角度を持つと瞳分割素子51によって分割された光束11BもZ方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束11BもZ方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット71Bの位置もプラス側に変位する。この変位量をdZとすると、ビームスポット71Bは(0、dZ)の位置にビームスポットとして観測される。
同様に光束10がZ方向プラス側へ向かう角度を持つと瞳分割素子51によって分割された光束11CもZ方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束11CもZ方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット71Cの位置もプラス側に変位する。この変位量をdZとすると、ビームスポット71Cは(−Yo、dZ)の位置にビームスポットとして観測される。
よってレーザ光源1が集光レンズ3に対してZ方向に理想状態よりΔZ<0だけ移動した場合は、ビームスポット71A,71B,71Cの間隔は変化なく、そろってZ方向にdZだけ変位して観察される。
レーザ光源1と集光レンズ3の相対位置の変化量に対してビームスポット71A,71B,71Cの間隔(3つのビームの像間の相対位置)や位置(3つのビームの像各々の光軸に対する位置)の変化量は、後述の数値実施例のようにリニアな比例関係がある。従ってビームスポット71A,71B,71Cの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光レンズ3の相対位置が理想状態に対してどれだけずれているか算出可能である。
本発明では像面7上のビームスポット71A,71B,71CをCCDカメラ8により画像として取込む。不図示の画像処理システムにより、画像として取込まれたビームスポットは各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。2次元CCDセンサ上のスポットの重心位置座標を算出する方法は既知の方法でよい。
算出されたビームスポット71A,71B,71CのYZ平面上での座標を(YA、ZA)、(YB、ZB)、(YC、ZC)とする。また理想の状態の座標を(+Yo、0)、(0、0)(−Yo、0)とする。
また、レーザ光源1と集光レンズ3の相対的な位置ズレに対するビームスポット71A,71B,71Cの座標変位敏感度(式(1)、式(2)、式(3))は、シミュレーションにより求めても、実験により求めてもよい。この座標変位敏感度を用いて、レーザ光源1と集光レンズ3のX,Y,Z方向相対位置ズレ量(ΔX、ΔY、ΔZ)は、それぞれ、
レーザ光源1と集光レンズ3のX方向相対位置ズレ量ΔX
=Ax×((YA−YC)−2×Yo) (18)
レーザ光源1と集光レンズ3のY方向相対位置ズレ量ΔY
=Ay×(YA+YC)/2=Ax×YB (19)
レーザ光源1と集光レンズ3のZ方向相対位置ズレ量ΔZ
=Az×(ZA+ZC)/2=Ax×YB (20)
と表せる。
X方向相対位置ズレ量ΔXはビームスポット71Aと71Cの距離が理想状態の距離からどの程度変位しているか差分をとり算出している。Y方向ズレはビームスポット71A,71Cが理想状態からY方向へどの程度変位しているか差分をとり、平均して算出している。またこの平均はビームスポット71Bが理想状態からY方向へ変位した量に一致する。Z方向ズレはビームスポット71A,71Cが理想状態からZ方向へどの程度変位しているか差分をとり平均して算出している。またこの平均はビームスポット71Bが理想状態からZ方向へ変位した量に一致する。
算出されたΔX、ΔY、ΔZに基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光レンズ3の相対位置を所望の精度に追い込んだ後、レーザ光源1はレーザホルダ2に対して固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
座標変位敏感度AyとAzは集光レンズ3の焦点距離と工具レンズ6の焦点距離によって決まるので所望の敏感度を得るために、調整対象である光源ユニットの集光レンズ3に応じて工具レンズ6の焦点距離を最適化すればよい。敏感度を高めて検知精度を上げるためには工具レンズ6の焦点距離を長くすればよい。
座標変位敏感度Axは集光レンズ3の焦点距離と工具レンズ6の焦点距離および光束10の光束幅で決まる。敏感度を高めて検知精度を上げるためには光束幅が広いほうが好ましく、瞳分割素子51を構成するプリズム51Aとプリズム51Cの配列方向を光束10の最大径方向と一致させるとよい。
なお本実施例では先に集光レンズ3を固定しレーザ光源1を微調整したが、これとは逆にレーザ光源1を先に固定し集光レンズ3の位置を微調整してもよい。
受光センサとして対物レンズと2次元CCDセンサからなるCCDカメラを示したが必ずしもこれに限るものではない。受光したビームスポットの重心位置座標を算出できれば既知の方式でよい。たとえば像面7に直接センサ受光面を置くとか、CMOSセンサを使用するとか、1次元ラインセンサを利用するなど様々な変形例で対応可能である。また瞳分割素子51のプリズムの角度の設定によりビームスポット71A,71B,71Cの間隔が広がり1台のセンサで受光できない場合は複数の受光センサを利用してもよいし、1台の受光センサを移動ステージに載せ、ビームスポット71A,71B,71Cの画像を順番に読み込んでもよい。また本実施例では集光レンズ3により平行光束を得る光源ユニットを想定したがこれに限られることなく、収束光束や発散光束を得る光源ユニットへも適応可能である。またレーザ光源ユニットを走査光学系に作り込むケースにも本件の瞳分割素子や工具レンズなどの光学系を応用することができる。
またプリズム51Aとプリズム51Cと平行平板部51Bの入射面または出射面の少なくとも一方を平面ではなく同一の曲率を有する曲面を配列したレンズアレイとすることで工具レンズ6のパワーを軽減させるかもしくは工具レンズ6そのものを省略することができる。
さらに、本実施例において、瞳分割素子51は、入射面にYZ平面に対して傾斜する面を有し、出射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイとして例示したが、本発明はこれに限定されることはない。出射面がYZ平面に対して傾斜する面を有し、入射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。つまり、入射面と出射面の内の一方がYZ平面に対して傾斜する面を有し、他方がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。
[数値実施例2]
次に図6と図7に示した第2の実施例に係る調整装置の数値実施例を示す。
光学系の配置は表2に示すとおりである。
次に図8A〜8Fに、数値実施例2において、集光レンズ3に対してレーザ光源1が相対的に位置ズレを生じたときにビームスポット71A、71B、71Cの座標がどのように変位するかを示す。
図8Aと図8Bは集光レンズ3に対してレーザ光源1が相対的にX方向にずれた時のビームスポット71A、71B、71CのY座標及びZ座標の変位量を示す。相対位置ズレがマイナスの場合は、集光レンズ3とレーザ光源1の間隔が開く方向であることを示す。図8Aからわかるように集光レンズ3とレーザ光源1の間隔が変化するとビームスポット71A、71CはY方向を逆方向に変位し、71Bは変位しない。また。図8Bからわかるように集光レンズ3とレーザ光源1の間隔が変化するとビームスポット71A、71B、71CはZ方向に変位しない。図8AからわかるようにAx=0.1mm/0.183mmである。
次に図8Cと図8Dは集光レンズ3に対してレーザ光源1が相対的にY方向にずれた時のビームスポット71A、71B、71CのY座標及びZ座標の変位量を示している。図8Cからわかるように集光レンズ3とレーザ光源1が相対的にY方向に変化するとビームスポット71A、71B、71CはY方向を同じ方向に変位する。また。図8Dからわかるように集光レンズ3とレーザ光源1が相対的にY方向に変化するとビームスポット71A、71B、71CはZ方向に変位しない。図8CからわかるようにAy=0.1mm/1.21mmである。
次に図8Eと図8Fは集光レンズ3に対してレーザ光源1が相対的にZ方向にずれた時のビームスポット71A、71B、71CのY座標及びZ座標の変位量を示している。図8Eからわかるように集光レンズ3とレーザ光源1が相対的にZ方向に変化するとビームスポット71A、71B、71CはY方向に変位しない。また。図8Fからわかるように集光レンズ3とレーザ光源1が相対的にZ方向に変化するとビームスポット71A、71B、71CはZ方向を同じ方向に変位する。図8FからわかるようにAz=0.1mm/1.21mmである。
次に図8A〜8Fでの変位に対して、像面7上のYZ平面上でビームスポット71A、71B、71Cの軌跡をプロットしたものを図8G〜8Iに示す。図8Gは集光レンズ3に対してレーザ光源1が相対的にX方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。YZ平面上でのビームスポットは、Y方向を逆方向に変位する。
図8Hは集光レンズ3に対してレーザ光源1が相対的にY方向に0.02mmのピッチで±0.05mmずれた時のYZ平面上でのスポットの軌跡である。YZ平面上でのビームスポットは、Y方向を同じ方向に変位する。
図8Iは集光レンズ3に対してレーザ光源1が相対的にZ方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。YZ平面上でのビームスポットは、Z方向を同じ方向に変位する。
以上のように。レーザ光源1と集光レンズ3の相対位置の変化量に対してビームスポット71A、71B、71Cの間隔や位置の変化量は、リニアな比例関係がある。従って71A、71B、71Cの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光レンズ3の相対位置が理想状態に対してどれだけずれているか算出可能である。
また、ピント方向のズレについてはビームスポット71A、71Cに着目し、Y方向とZ方向のずれについてはビームスポット71Bに着目して算出してもよい。
上述した式(18)〜(20)により算出された、レーザ光源1と集光レンズ3のX,Y,Z方向相対位置ズレ量(ΔX、ΔY、ΔZ)に基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光レンズ3の相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。またマルチビームのレーザ光源ユニットに適用できることは言うまでもない。
本発明の構成では、従来のようにビームスポット画像を読み込んでスポット径やピーク光量を算出するという工程を何度も回数を繰り返す必要がなく、1度ビームスポット画像を読み込んで演算処理することで3次元的な相対位置ずれ量を算出することが可能である。
また組み立てた光源ユニットのピントなどを再確認する際も少ない工数で確認できる。これにより組立工数を大幅に削減し低コストが可能となる。
図9に、本発明の第3の実施例の走査光学系用光源ユニットの調整装置の斜視図を示す。本実施例の調整装置は、第1及び第2の実施例の調整装置とほぼ同様の構成を有し、第1、第2の実施例の調整装置の瞳分割素子に対し、本実施例では、瞳分割素子52を有することが異なる、また図10は本実施例に係る調整装置の瞳分割素子52を示す。
本実施例の調整装置の構成を図9と図10を用いて説明する。本実施例の調整装置の構成は、第1及び第2の実施例とは、瞳分割素子52を除いて同じであるので、重複する構成に関する説明は省略する。
絞り4は、図1(実施例1)や6(実施例2)と同じく、集光レンズ3の直後に設けられ(図9では不図示)、Y方向に長軸をもつ矩形の穴を開けたプレートである。矩形開口を有する絞り4により光束10は矩形形状となる。
瞳分割素子(分割素子)52は、プリズム52A,52B,52C,52DをY方向とZ方向に配列して構成される。プリズム52A,52B,52C,52Dから構成される瞳分割素子52は、光軸を含むXY平面及び光軸を含むXZ平面に対して対称な形状となっている。図9及び図10ではプリズムプリズム52A,52B,52C,52Dの入射面がYZ平面に対して傾斜しており、出射面がYZ平面に対して平行な1つの平面から形成されている。プリズム52A,52B,52C,52Dの入射面の傾斜が光軸側の肉厚が厚く、瞳分割素子52の外周の4隅側が薄くなるような傾斜を持たせている。
工具レンズ6は入射したビームを像面7(受光センサ上、受光素子上)に集光してビームスポット72A,72B,72C、72Dを形成する。像面7に形成されたビームスポットは受光センサとしてのCCDカメラ8により画像として取込まれる。CCDカメラ8は対物レンズと受光画素が2次元的に配列されたCCDセンサから構成されている。CCDカメラ8により画像として取込まれたビームスポットは不図示の画像処理システムにより各ビームスポットの重心が像面7のYZ座標系のどこにあるかを算出される。演算処理されたビームスポットのYZ座標に基づき、レーザ光源1を保持する不図示の工具ハンドを駆動制御する。
より具体的な作用について図9と図10を用いて説明する。なお簡単のために図9では光線の主光線のみを記載する。本実施例の調整装置の構成は、第1及び第2の実施例とは、瞳分割素子52を除いては同じであるので、レーザ光源を出射してから瞳分割素子52に入射するまでの光路に関する説明は省略する。
絞り4を通過した光束10は瞳分割素子52を構成するプリズム52A,52B,52C,52Dに入射する。図9からわかるように光束10はY方向とZ方向に4分割され、瞳A光束12A、瞳B光束12B、瞳C光束12C、瞳D光束12Dとなる。瞳A光束12A、瞳B光束12B、瞳C光束12C、瞳D光束12Dがそれぞれプリズム52A,52B,52C,52Dにより光軸(X軸)側へ屈折する。
本実施例においては、瞳分割素子52にて1本の光束10を像面7(受光センサ上、受光素子上)上に2次元方向に4分割し、瞳A光束12A、瞳B光束12B、瞳C光束12C、瞳D光束12Dとなるように構成している。
2次元方向に4分割したことで、主走査方向のピント位置と副走査方向のピント位置の差分(いわゆる非点収差)がある場合でも、主走査方向のピント位置と副走査方向のピント位置をそれぞれ個別に検知することが可能となる。
たとえば、本発明のレーザ光源1に端面発光タイプの半導体レーザを使用した場合には、素子構造上の理由で主走査断面内での半導体レーザ内の発光点と副走査断面内での半導体レーザ内の発光点が光軸方向にずれている。このような場合でも、実施例1(図2)の1次元方向に光束を分割する場合に比べて、瞳分割素子52にて1本の光束10を像面7(受光センサ上、受光素子上)上に2次元方向に4分割して、主走査方向のピントずれ量と副走査方向のピントずれ量を各々測定することでより良好なピントずれ補正が実現できる。
但し、実施例1(図2)のように、瞳分割素子5にて1本の光束10を像面7(受光センサ上、受光素子上)上に1次元方向(主走査方向)に2分割する光学系でも、実施例に述べたように、ピントずれ量の補正は可能である。
1次元方向(主走査方向)に2分割されたビームスポット7A、7Bの主走査方向の間隔を測定し、主走査方向のピントずれ量を算出する。
また、主走査断面内での半導体レーザ内の発光点と副走査断面内での半導体レーザ内の発光点が光軸方向にずれている量を予めテーブル値として測定しておく。
そして、主走査方向のピントずれ量、テーブル値を用いて、主走査方向のピントずれ量と副走査方向のピントずれ量をバランス良く補正できる量を算出すれば良い。
つまり、像面7上での非点収差を考慮して、主走査方向のピントずれ量と副走査方向のピントずれ量の違いを考慮した補正値を算出すれば良い。
次に工具レンズ6に入射した光束12A、12B、12C、12Dは、工具レンズ6に結像作用を受け、工具レンズ6の像面7にビームスポット72A,72B,72C、72Dを形成する。
像面7上のビームスポット72A,72B,72C、72DはCCDカメラ8により画像として取込まれる。不図示の画像処理システムにより、画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。
理想状態で(設計位置に)レーザ光源1と集光レンズ3が配置され、集光レンズ3から射出されるレーザビームが所望の平行度の平行光束であるならば、像面7上における光軸上の点をYZ平面の原点(0,0)として表すと、ビームスポット72A,72B,72C、72Dは像面7で(−Yo、−Zo)、(−Yo、Zo)、(Yo、Zo)、(Yo、−Zo)の位置に結像する。
レーザ光源1と集光レンズ3の相対位置がずれた場合にビームスポット72A,72B,72C、72Dがどのように観測されるかを説明する。
まずレーザ光源1と集光レンズ3との距離が理想状態よりX方向においてΔXだけ短い場合は、集光レンズ3から出射した光束10は発散気味の光束となる。図9からわかるように光束10が発散光束だと瞳分割素子52によって分割された光束12A、12B、12C、12DはX軸に近づく方向へ変位する。逆にレーザ光源1と集光レンズ3との距離が理想状態よりX方向においてΔXだけ長い場合は、集光レンズ3から出射した光束10は収束気味となり、工具レンズ6に入射した光束12A、12B、12C、12DはX軸から遠ざかる方向へ変位する。この結果、像面7上の72A,72B,72C、72Dは放射状の移動として観測される。
次にレーザ光源1が集光レンズ3に対してY方向に理想状態よりΔY<0だけ移動した(Y軸方向マイナス側へ移動した)場合は、集光レンズ3から射出された光束10はY方向プラス側へ向かう角度を持つ。図9からわかるように光束10がY方向プラス側へ向かう角度を持つと瞳分割素子52によって分割された光束12A、12B、12C、12DはそれぞれY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束12A、12B、12C、12DもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット72A,72B,72C、72Dの位置もY方向プラス側に変位して観察される。
次にレーザ光源1が集光レンズ3に対してZ方向に理想状態よりΔZ<0だけ移動した(Z軸方向マイナス側へ移動した)場合は、集光レンズ3から射出された光束10はZ方向プラス側へ向かう角度を持つ。図9からわかるように光束10がZ方向プラス側へ向かう角度を持つと瞳分割素子52によって分割された光束12A、12B、12C、12DはそれぞれZ方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束12A、12B、12C、12DもZ方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット72A,72B,72C、72Dの位置もZ方向プラス側に変位して観察される。
レーザ光源1と集光レンズ3の相対位置の変化量に対してビームスポット72A,72B,72C、72Dの間隔(4つのビームの像間の相対位置)や位置(4つのビームの像各々の光軸に対する位置)の変化量は、後述の数値実施例のようにリニアな比例関係がある。従ってビームスポット72A,72B,72C、72Dの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光レンズ3の相対位置が理想状態に対してどれだけずれているか算出可能である。
本発明では像面7上のビームスポット72A,72B,72C、72DをCCDカメラ8により画像として取込む。画像として取込まれたビームスポットは不図示の画像処理システムにより各ビームスポットの重心が像面7のYZ座標系のどこにあるかを算出する。2次元CCDセンサ上のスポットの重心位置座標を算出する方法は既知の方法でよい。
算出されたビームスポット72A,72B,72C、72DのYZ平面上の座標を(YA,ZA)、(YB,ZB)、(YC,ZC)、(YD,ZD)とする。また理想の状態の座標を(−Yo、−Zo)、(−Yo、Zo)、(Yo、Zo)、(Yo、−Zo)とする。
また、レーザ光源1と集光レンズ3の相対位置ズレに対するビームスポット72A,72B,72C、72Dの座標変位敏感度(式(1)、式(2)、式(3))は、シミュレーションにより求めても、実験により求めてもよい。この座標変位敏感度を用いて、レーザ光源1と集光レンズ3のX、Y,Z方向相対位置ズレ量(ΔX、ΔY、ΔZ)は、それぞれ、
レーザ光源1と集光レンズ3のX方向相対位置ズレ量ΔX
=Ay×(YA+YB+YC+YD)/4 (22)
レーザ光源1と集光レンズ3のZ方向相対位置ズレ量ΔZ
=Az×(ZA+ZB+ZC+ZD)/4 (23)
と表せる。
X方向相対位置ズレ量ΔXはビームスポット72Aと72Cの距離やビームスポット72Bと72Dの距離が理想状態の距離からどの程度変位しているか差分をとり、平均して算出している。Y方向ズレはビームスポット72A,72B,72C、72Dが理想状態からY方向へどの程度変位しているか差分をとり、平均して算出している。Z方向ズレはビームスポット72A,72B,72C、72Dが理想状態からZ方向へどの程度変位しているか差分をとり、平均して算出している。
算出されたΔX、ΔY、ΔZに基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光レンズ3の相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
なお本実施例では先に集光レンズ3を固定しレーザ光源1を微調整したが、これとは逆にレーザ光源1を先に固定し集光レンズ3の位置を微調整してもよい。
受光センサとして対物レンズと2次元CCDセンサからなるCCDカメラを示したが必ずしもこれに限るものではない。受光したビームスポットの重心位置座標を算出できれば既知の方式でよい。たとえば像面7に直接センサ受光面を置くとか、CMOSセンサを使用するとか、1次元ラインセンサを利用するなど様々な変形例で対応可能である。また瞳分割素子52のプリズムの角度の設定によりビームスポット72A,72B,72C、72Dの間隔が広がり1台のセンサで受光できない場合は複数の受光センサを利用してもよいし、1台の受光センサを移動ステージに載せ、ビームスポット72A,72B,72C、72Dの画像を順番に読み込んでもよい。また本実施例では集光レンズ3により平行光束を得る光源ユニットを想定したがこれに限られることなく、収束光束や発散光束を得る光源ユニットへも適応可能である。またレーザ光源ユニットを走査光学系に作り込むケースにも本件の瞳分割素子や工具レンズなどの光学系を応用することができる。
またプリズム52A,52B,52C,52Dの入射面または出射面の少なくとも一方を平面ではなく同一の曲率を有する曲面を配列したレンズアレイとすることで工具レンズ6のパワーを軽減させるかもしくは工具レンズ6そのものを省略することができる。
さらに、本実施例において、瞳分割素子52は、入射面はYZ平面に対して傾斜し、出射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイとして例示したが、本発明はこれに限定されることはない。出射面がYZ平面に対して傾斜し、入射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。つまり、入射面と出射面の内の一方がYZ平面に対して傾斜し、他方がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。
[数値実施例3−1]
次に図9と図10に示した第3の実施例に係る調整装置の数値実施例を示す。
光学系の配置は表3に示すとおりである。
次に図11A〜11Jに集光レンズ3に対してレーザ光源1が相対的に位置ズレを生じたときに瞳A光束12A、瞳B光束12B、瞳C光束12C、瞳D光束12Dが結像したビームスポットビームスポット72A,72B,72C、72Dの座標がどのように変位するかを示す。
図11Aと図11Bに、集光レンズ3に対してレーザ光源1が相対的にX方向にずれた時のビームスポット72A,72B,72C、72DのY座標及びZ座標の変位量を示す。相対位置ズレがマイナスの場合は、集光レンズ3とレーザ光源1の間隔が開く方向であることを示す。図11Aからわかるように、集光レンズ3とレーザ光源1の間隔が変化するとビームスポット72Aと72Dに対し、72Bと72CがY方向を逆方向に変位する。また。図11Bからわかるように集光レンズ3とレーザ光源1の間隔が変化するとビームスポット72Aと72Bに対し、72Cと72DがZ方向を逆方向に変位する。
次に図11Cと図11Dは集光レンズ3に対してレーザ光源1が相対的にY方向にずれた時のビームスポットビームスポット72A,72B,72C、72DのY座標及びZ座標の変位量を示している。図11Cからわかるように集光レンズ3とレーザ光源1が相対的にY方向に変化するとビームスポット72A,72B,72C、72DはY方向を同じ方向に変位する。また。図11Dからわかるように集光レンズ3とレーザ光源1が相対的にY方向に変化するとビームスポット72A,72B,72C、72D変位しない。
次に図11Eと図11Fは集光レンズ3に対してレーザ光源1が相対的にZ方向にずれた時のビームスポット72A,72B,72C、72DのY座標及びZ座標の変位量を示している。図11Eからわかるように集光レンズ3とレーザ光源1が相対的にZ方向に変化するとビームスポット72A,72B,72C、72DはY方向に変位しない。また。図11Fからわかるように集光レンズ3とレーザ光源1が相対的にZ方向に変化するとビームスポット72A,72B,72C、72DはZ方向を同じ方向に変位する。
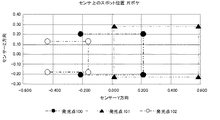
次に図11A〜11Fでの変位に対して、像面7上のYZ平面上でビームスポット72A,72B,72C、72Dの軌跡をプロットしたものを図11G〜11Iに示す。
図11Gは集光レンズ3に対してレーザ光源1が相対的にX方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。放射状に変位する。
図11Hは集光レンズ3に対してレーザ光源1が相対的にY方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。Y方向を同じ方向に変位する。
図11Iは集光レンズ3に対してレーザ光源1が相対的にZ方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。Z方向を同じ方向に変位する。
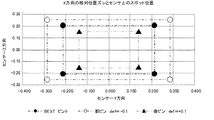
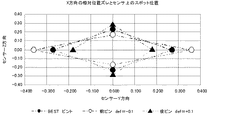
更に図11Jにはレーザ光源1が光軸(X)方向に±0.1mmずれた場合の像面7上のYZ平面上でビームスポット72A,72B,72C、72Dの軌跡をプロットしている。ここでは、レーザ光源1と集光レンズ3との間隔が、理想状態に対して、0.1mm長くなった場合(def=-0.1)と、0.1mm短くなった場合(def=+0.1)を示す。4つのビームスポットによって矩形が構成され、レーザ光源1が光軸(X)方向のズレによって矩形の大きさが変わる様に観測される。
以上のように。レーザ光源1と集光レンズ3の相対位置の変化量に対してビームスポット72A,72B,72C、72Dの間隔や位置の変化量は、リニアな比例関係がある。従ってビームスポット72A,72B,72C、72Dの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光レンズ3の相対位置が理想状態に対してどれだけずれているか算出可能である。
上述した式(21)、(22)、(23)によって算出された、レーザ光源1と集光レンズ3のX,Y,Z方向相対位置ズレ量(ΔX、ΔY、ΔZ)に基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光レンズ3の相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
本発明の構成では、従来のようにビームスポット画像を読み込んでスポット径やピーク光量を算出するという工程を何度も回数を繰り返す必要がなく、1度ビームスポット画像を読み込んで演算処理することで3次元的な相対位置ずれ量を算出することが可能である。
また組み立てた光源ユニットのピントなどを再確認する際も少ない工数で確認できる。これにより組立工数を大幅に削減し低コストが可能となる。
[数値実施例3−2]
次に図12に、第3の実施例に係る調整装置を適用した別の数値実施例を示す。本数値実施例は、レーザ光源1として複数の発光点を有するマルチビームのレーザ光源の調整に適用した事例である。調整対象である光源ユニットのレーザ光源は、発光点100,101,102を有する。中央部の発光点100は図9のレーザ光源1に相当する。
調整装置内の光学系の配置は数値実施例3−1(表3)と同等である。
調整対象であるレーザ光源の発光点の間隔は0.05mmである。図12に示すように発光点100,101,102は直線状に並びかつXY平面に対し傾斜角θを有する配置である。傾斜角度はθ=4.5度である。
レーザ光源1および集光レンズ3は保持部材としてのレーザホルダ2によって保持されて走査光学系用の光源ユニット21を構成する。光源ユニット21は不図示の取り付け部により調整装置に着脱可能である。レーザホルダ2に対し集光レンズ3が固定されて調整装置に装着される。レーザ光源1は不図示の工具ハンドにより保持され、レーザホルダ2に対して3次元的に変位可能な構成をとる。後述する本件の調整方法によりレーザ光源1の位置を微調整して、集光レンズ3に対するレーザ光源1の相対位置を、中心の発光点100のX、Y、Z方向の位置及び3つの発光点100,101,102の配列方向のX軸及びZ軸周りに対する回転角において、所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光レンズ3をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
絞り(第2の絞り)4は図9に示した数値実施例の場合と同じく、集光レンズ3の直後に設けられている。絞り4はY方向に長軸をもつ矩形の穴を開けたプレートである。矩形開口を有する絞り4により光束10は矩形形状となる。
瞳分割素子52はプリズム52A,52B,52C,52DをY方向とZ方向に配列して構成される。プリズム52A,52B,52C,52DはXY平面、XZ平面に対して対称な形状となっている。図9及び図10ではプリズムプリズム52A,52B,52C,52Dの入射面がYZ平面に対して傾斜しており、出射系面がYZ平面に対して平行となっている。プリズム52A,52B,52C,52Dの入射面の傾斜が光軸側の肉厚が厚く、瞳分割素子52の外周の4隅側が薄くなるような傾斜を持たせている。
工具レンズ6は入射したビームを像面7(受光センサ上、受光素子上)に集光してビームスポット72A(n),72B(n),72C(n)、72D(n)、ただしn=100,101,102を形成する。像面7に形成されたビームスポットは受光センサとしてのCCDカメラ8により画像として取込まれる。CCDカメラ8は対物レンズと受光画素が2次元的に配列されたCCDセンサから構成されている。不図示の画像処理システムにより、CCDカメラ8により画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。演算処理されたビームスポットのYZ座標に基づき、レーザ光源1を保持する不図示の工具ハンドを駆動制御する。
数値実施例3−2の調整装置の光学配置は数値実施例3−1の調整装置の光学配置(表2)と同等なので、レーザ光源1と集光レンズ3の相対位置のずれ量に対するビームスポット変位は数値実施例3−1と同等になる。すなわち図11A〜11Fと同じである。
像面7で観測されるビームスポットは合計12点である。発光点100からの光束が4分割されてビームスポット72A(100),72B(100),72C(100)、72D(100)を形成する。発光点101からの光束が4分割されてビームスポット72A(101),72B(101),72C(101)、72D(101)を形成する。発光点102からの光束が4分割されてビームスポット72A(102),72B(102),72C(102)、72D(102)を形成する。
図13Aにはレーザ光源1と集光レンズ3の相対位置が理想状態のときの12個のビームスポットが像面7上でどのように観測されるかを示している。なお図13Aで中央の発光点100による4つのビームスポットは、数値実施例3−1で示した図11Jのベストピントの状態と同じである。
図13Aに示すように、3つの発光点それぞれに対応する像面7上での各4つ組みのビームスポットは、前述の方法で集光レンズ3と3つ発光とY方向とZ方向の相対位置ずれを算出できる。またY方向とZ方向の相対位置ずれから、発光点の配列方向とY軸の傾き角度を算出できる。理想どおりの配置なら傾き角4.5度で観測される。もし3つの発光点が光軸回りに回転していた場合は4.5度とは異なる値となる。その場合は所望の角度差以下になるように不図示の工具ハンドでレーザ光源をX軸周りに回転して調整すれば良い。
図13Bにはレーザ光源1と集光レンズ3の相対位置が理想状態からピント(X軸)方向に0.1mm広がったとき12個のビームスポットが像面7上でどのように観測されるかを示している。なお図13Bで中央の発光点100による4つのビームスポットは、数値実施例3−1で示した図11Jのdef=-0.1の状態と同じである。
図13Cにはレーザ光源1と集光レンズ3の相対位置が理想状態からピント(X方向)に0.1mm縮まったとき12個のビームスポットが像面7上でどのように観測されるかを示している。なお図13Cで中央の発光点100による4つのビームスポットは、数値実施例3−1で示した図11Jのdef=+0.1の状態と同じである。
図13A〜図13Cを比較すればわかるように、レーザ光源1と集光レンズ3の相対位置が理想状態からピント(X方向)に変位した場合、ビームスポット72A(n),72B(n),72C(n)、72D(n)で形成される矩形は、発光点100,101,102によらず、同じように縮小拡大して観測される。数値実施例3−1で示したように、各発光点100,101,102に対応したビームスポットの座標を計測しピントズレ量をビームごとに算出可能である。図13A〜図13Cではピントズレ量が同じなのでビームスポットの変位量も同じである。
次に図13Dにはレーザ光源がZ軸周りに回転して所謂片ボケが生じた場合に観測されるビームスポットを示している。レーザ光源がZ軸周りに回転して、中央発光点100がベストピント、発光点101がDEF=−0.1、発光点102がDEF=+0.1となった場合を示している。3つの発光点それぞれに対応する像面7上での各4つ組みのビームスポットで形成される矩形が異なって観測される。それぞれ各4つ組みのビームスポットにてピントズレ量を算出し、その相対差を計算することで片ボケ量がわかる。
片ボケ量と発光点ピッチからZ軸周りに回転している量が特定されるので所望のピント差以下になるように不図示の工具ハンドでレーザ光源をZ軸周りに回転調整すれば良い。
図14に、本発明の第4の実施例の走査光学系用光源ユニットの調整装置の斜視図、図16はXY断面図、図17はXZ断面図を示す。本実施形態の調整装置は、偏向器を有する光走査装置に搭載される光源ユニットのレーザ光源と集光光学素子としての集光アナモフィックレンズの相対的な位置関係を調整する調整装置であって、図14に示すように、調整対象であるレーザ光源1及び集光アナモフィックレンズ31を含む光源ユニットを固定するための取り付け部(不図示)、絞り4(不図示)、工具アナモフィックレンズ61、瞳分割素子53、工具レンズ6、受光センサとしての2次元CCDカメラ8により構成される。座標系は光軸がX軸、X軸に直交する面にY軸とZ軸を設ける。第1乃至3の実施例の調整装置と比較して異なる構成要素は、瞳分割素子53であり、また、工具アナモフィックレンズ61を有することも異なる。図15に本実施例の瞳分割素子53を示す。
本実施例の調整装置の構成を図14〜図17を用いて説明する。
レーザ光源1および集光アナモフィックレンズ31は保持部材としてのレーザホルダ2によって保持されて走査光学系用の光源ユニット21を構成する。光源ユニット21は不図示の取り付け部により本実施例の調整装置に着脱可能である。レーザホルダ2に対し集光アナモフィックレンズ31が固定されて調整装置に装着される。レーザ光源1は不図示の工具ハンドにより保持され、レーザホルダ2に対して3次元的に変位可能な構成をとる。後述する本件の調整方法によりレーザ光源1の位置を微調整して、集光アナモフィックレンズ31に対するレーザ光源1の3次元的に相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光アナモフィックレンズ31をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
光学ユニットの集光アナモフィックレンズ31は、XY平面内のパワーとZX平面内のパワーが異なる集光レンズである。単一のレンズでもよいし、複合レンズでもよい。
絞り4はY方向に長軸をもつ矩形の穴を開けたプレートである。矩形開口を有する絞り4により光束10は矩形形状となる。
図15に示す瞳分割素子53はプリズム53A,53B,53C,53DをY方向とZ方向に配列して構成される。図10に示した実施例3の調整装置の瞳分割素子52に対して光軸周りに45度回転させた配置である。プリズム53A,53B,53C,53Dから構成される瞳分割素子53は、光軸を含むXY平面及び光軸を含むXZ平面に対して対称な形状となっている。図14及び図15ではプリズム53A,53B,53C,53Dの入射面がYZ平面に対して傾斜しており、出射面がYZ平面に対して平行な一つの平面から構成されている。プリズム53A,53B,53C,53Dの入射面の傾斜が光軸側の肉厚が厚く、瞳分割素子53の外周の4辺側が薄くなるような傾斜を持たせている。
工具レンズ6は入射したビームを像面7(受光センサ上、受光素子上)に集光してビームスポット73A,73B,73C、73Dを形成する。像面7に形成されたビームスポットは受光センサとしてのCCDカメラ8により画像として取込まれる。CCDカメラ8は対物レンズと受光画素が2次元的に配列されたCCDセンサから構成されている。CCDカメラ8により画像として取込まれたビームスポットは不図示の画像処理システムにより各ビームスポットの重心が像面7のYZ座標系のどこにあるかを算出される。演算処理されたビームスポットのYZ座標に基づき、レーザ光源1を保持する不図示の工具ハンドを駆動制御する。
より具体的な作用について図14〜図17を用いて説明する。なお簡単のために図14では光線の主光線のみ、図16に示したXY断面図と図17に示したXZ断面図にはマージナル光線のみを記載する。
光源ユニット21が不図示の取り付け部により本発明の調整装置に取り付けられ、レーザ光源1を点灯すると、レーザ光源1より出射したレーザビームは集光アナモフィックレンズ31により集光される。集光アナモフィックレンズ31の前側焦点位置にレーザ光源1を一致させることでレーザビームをXY平面内で平行光束に、ZX平面内で収束光束に変換させる。平行光束が所望の平行度となるためには集光アナモフィックレンズ31の前側焦点位置とレーザ光源1との光軸(X)方向の位置ズレの許容度は±0.050mm、より好ましくは±0.020mm以下に合わせる必要がある。また同様に集光アナモフィックレンズ31の光軸に対して垂直方向のY方向やZ方向に対してもレーザ光源1が大幅にずれると光走査装置の印字位置精度に影響を及ぼす。Y方向やZ方向の位置ズレの許容度は±0.100mm、より好ましくは±0.030mm以下に合わせる必要がある。
しかし光源ユニット21が製造時に組み立てられた時点では、光軸(X)方向、Y方向やZ方向に所望の位置精度で配置することは一般に困難であり、組み立て後に微調整を行う必要がある。
集光アナモフィックレンズ31から出射した光束は、矩形開口を有する絞り4により光軸に対して垂直な断面が矩形状の光束10に変換される。調整装置において光源ユニット21の集光アナモフィックレンズ31から絞り4までの光軸方向の距離は、光走査装置での集光アナモフィックレンズ31から絞り(第1の絞り)までの光軸方向の距離に一致させることが望ましい。もしくはこれと光学的に等価な位置に設定するとよい。
絞り4を通過した光束はZX平面内で1度集光した後、工具アナモフィックレンズ61により平行光となる。ZX平面内で集光アナモフィックレンズ31の後ろ側集光点と工具アナモフィックレンズ61の前側焦点は一致させてある。
工具アナモフィックレンズ61を通過した光束10は瞳分割素子53を構成するプリズム53A,53B,53C,53Dに入射する。図14からわかるように光束10はY方向とZ方向に対し45度方向に4分割され、瞳A光束13A、瞳B光束13B、瞳C光束13C、瞳D光束13Dに分割される。瞳A光束13A、瞳B光束13B、瞳C光束13C、瞳D光束13Dがそれぞれプリズム53A,53B,53C,53Dにより光軸(X軸)側へ屈折する。
次に工具アナモフィックレンズ61に入射した光束13A、13B、13C、13Dは、工具アナモフィックレンズ61に結像作用を受け、調整装置の像面7にビームスポット73A,73B,73C、73Dを形成する。
像面7上のビームスポット73A,73B,73C、73DはCCDカメラ8により画像として取込まれる。不図示の画像処理システムにより、画像として取込まれた各ビームスポットの重心が像面7のYZ座標系のどこにあるかが算出される。
理想状態どおりにレーザ光源1と集光アナモフィックレンズ31が配置され、集光アナモフィックレンズ31から射出されるレーザビームが所望の平行度の平行光束であるならば、ビームスポット73A,73B,73C、73Dは像面7で(0、−Zo)、(−Yo、0)、(0、Zo)、(Yo、0)、の位置に結像する。
レーザ光源1と集光アナモフィックレンズ31の相対位置ずれた場合にビームスポット73A,73B,73C、73Dがどのように観測されるかを説明する。
まずレーザ光源1が集光アナモフィックレンズ31に対してX方向の距離が理想状態よりΔXだけ近い場合は、集光アナモフィックレンズ31から出射した光束10は発散気味の光束となる。図14〜図17からわかるように光束10が発散光束だと集光アナモフィックレンズ31直後では光束13A、13B、13C、13DはX軸に近づく方向へ変位する。さらにZX平面内で1度集光した後、工具アナモフィックレンズ61に入射するときは、光束13A、13CはX軸に近づく方向へ、光束13B、13D、はX軸から離れる方向へ変位する。
この結果、像面7上の73A,73B,73C、73Dは放射状の移動であるが、光束13A、13Cに対して13Bと13D光束は反対方向の変位として観測される。
次にレーザ光源1が集光アナモフィックレンズ31に対してY方向に理想状態よりΔY<0だけ移動した(Y方向マイナス側へ移動した)場合は、集光アナモフィックレンズ31から出射した光束10は、Y方向プラス側へ向かう角度を持つ。図14〜図17からわかるように光束10がY方向プラス側へ向かう角度を持つと瞳分割素子53によって分割された光束13A、13B、13C、13DはそれぞれY方向プラス側へ向かう角度を持つ。このため工具レンズ6に入射した光束13A、13B、13C、13DもY方向プラス側へ向かう角度を持って進むため、像面7上のビームスポット73A,73B,73C、73Dの位置もY方向プラス側に変位して観察される。
次にレーザ光源1が集光アナモフィックレンズ31に対してZ方向に理想状態よりΔZ<0だけ移動した(Z方向マイナス側へ移動した)場合は、集光アナモフィックレンズ31から出射した光束10はZ方向プラス側へ向かう角度を持つ。一方、ZX平面内で1度集光した後、工具アナモフィックレンズ61に入射するため、工具アナモフィックレンズ61を通過後の光束はZ方向マイナス側へ向かう角度を持つ。よって像面7上のビームスポットビームスポット73A,73B,73C、73Dの位置もZ方向マイナス側に変位して観察される。
レーザ光源1と集光アナモフィックレンズ31の相対位置の変化量に対してビームスポット73A,73B,73C、73Dの間隔(4つのビームの像間の相対位置)や位置(4つのビームの像各々の光軸に対する位置)の変化量は、後述の数値実施例のようにリニアな比例関係がある。従ってビームスポット73A,73B,73C、73Dの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光アナモフィックレンズ31の相対位置が理想状態に対してどれだけずれているか算出可能である。
本発明では像面7上のビームスポット73A,73B,73C、73DをCCDカメラ8により画像として取込む。画像として取込まれたビームスポットは不図示の画像処理システムにより各ビームスポットの重心が像面7のYZ座標系のどこにあるかを算出する。2次元CCDセンサ上のスポットの重心位置座標を算出する方法は既知の方法でよい。
算出されたビームスポット73A,73B,73C、73Dの座標を(YA,ZA)、(YB,ZB)、(YC,ZC)、(YD,ZD)とする。また理想状態(設計位置)の座標を(−Yo、0)、(0、Zo)、(Yo、0)、(0、−Zo)とする。
また、レーザ光源1と集光アナモフィックレンズ31の相対位置ズレに対するビームスポット73A,73B,73C、73Dの座標変位敏感度、
Ax1=ピント(X方向)ズレ / ビームスポットY方向ズレ量 (24)
Ax2=ピント(X方向)ズレ / ビームスポットZ方向ズレ量 (25)
Ay=Y方向ズレ / ビームスポットY方向ズレ量 (26)
Az=Z方向ズレ / ビームスポットZ方向ズレ量 (27)
はシミュレーションにより求めても、実験により求めてもよい。この座標変位敏感度を用いて、レーザ光源1と集光アナモフィックレンズ31のX、Y,Z方向相対位置ズレ量(ΔX、ΔY、ΔZ)は、それぞれ、
レーザ光源1と集光アナモフィックレンズ31のX方向相対位置ズレ量ΔX
レーザ光源1と集光アナモフィックレンズ31のY方向相対方向相対方向相対量ΔY
=Ay×(YA+YB+YC+YD)/4 (29)
レーザ光源1と集光アナモフィックレンズ31のZ方向相対位置ズレ量ΔZ
=Az×(ZA+ZB+ZC+ZD)/4 (30)
と表せる。
X方向相対位置ズレ量ΔXは、ビームスポット73Aと73Cの距離やビームスポット73Bと73Dの距離が理想状態の距離からどの程度変位しているか差分をとり、平均して算出している。Y方向ズレはビームスポット73A,73B,73C、73Dが理想状態からY方向へどの程度変位しているか差分をとり、平均して算出している。Z方向ズレはビームスポット73A,73B,73C、73Dが理想状態からZ方向へどの程度変位しているか差分をとり、平均して算出している。
算出されたΔX、ΔY、ΔZに基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光アナモフィックレンズ31の相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光アナモフィックレンズ31をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
なお本実施例では先に集光アナモフィックレンズ31を固定しレーザ光源1を微調整したが、これとは逆にレーザ光源1を先に固定し集光アナモフィックレンズ31を微調整してもよい。
受光センサとして対物レンズと2次元CCDセンサからなるCCDカメラを示したが必ずしもこれに限るものではない。受光したビームスポットの重心位置座標を算出できれば既知の方式でよい。たとえば像面7に直接センサ受光面を置くとか、CMOSセンサを使用するとか、1次元ラインセンサを利用するなど様々な変形例で対応可能である。また瞳分割素子53のプリズムの角度の設定によりビームスポット73A,73B,73C、73Dの間隔が広がり1台のセンサで受光できない場合は複数の受光センサを利用してもよいし、1台の受光センサを移動ステージに載せ、ビームスポット73A,73B,73C、73Dの画像を順番に読み込んでもよい。また本実施例では集光アナモフィックレンズ31により平行光束を得る光源ユニットを想定したがこれに限られることなく、収束光束や発散光束を得る光源ユニットへも適応可能である。またレーザ光源ユニットを走査光学系に作り込むケースにも本件の瞳分割素子や工具レンズなどの光学系を応用することができる。
またプリズム53A,53B,53C,53Dの入射面または出射面の少なくとも一方を平面ではなく同一の曲率を有する曲面を配列したレンズアレイとすることで工具レンズ6のパワーを軽減させるかもしくは工具レンズ6そのものを省略することができる
さらに、本実施例において、瞳分割素子53は、入射面はYZ平面に対して傾斜し、出射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイとして例示したが、本発明はこれに限定されることはない。出射面がYZ平面に対して傾斜し、入射面がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。つまり、入射面と出射面の内の一方がYZ平面に対して傾斜し、他方がYZ平面に対して平行な一つの平面から構成されるプリズムアレイであっても、本発明の効果を享受できる。
[数値実施例4]
次に図14〜図17に示した第4の実施例に係る調整装置の数値実施例を示す。光学系の配置は表4に示すとおりである。表中、Ryは面のY方向曲率半径、Rzは面のZ方向曲率半径、dは第n面と第(n+1)面間の間隔、Nは屈折率を示す。
次に図18A〜18Jに集光アナモフィックレンズ31に対してレーザ光源1が相対的に位置ズレを生じたときに瞳A光束13A、瞳B光束13B、瞳C光束13C、瞳D光束13Dが結像したビームスポット73A,73B,73C、73Dの座標がどのように変位するかを示す。
図18Aと図18Bは集光アナモフィックレンズ31に対してレーザ光源1が相対的にX方向にずれた時のビームスポット73A,73B,73C、73DのY座標及びZ座標の変位量を示している。相対位置ズレがマイナスとは集光アナモフィックレンズ31とレーザ光源1の間隔が開く方向である。図18Aからわかるように集光アナモフィックレンズ31とレーザ光源1の間隔が変化するとビームスポット73Aと73CはY方向に変位し、73Bと73DはZ方向に変位する。
次に図18Cと図18Dは集光アナモフィックレンズ31に対してレーザ光源1が相対的にY方向にずれた時のビームスポット73A,73B,73C、73DのY座標及びZ座標の変位量を示している。図18Cからわかるように集光アナモフィックレンズ31とレーザ光源1が相対的にY方向に変化するとビームスポット73A,73B,73C、73DはY方向を同じ方向に変位する。また。図18Dからわかるように集光アナモフィックレンズ31とレーザ光源1が相対的にY方向に変化するとビームスポット73A,73B,73C、73DはZ方向に変位しない。
次に図18Eと図18Fは集光アナモフィックレンズ31に対してレーザ光源1が相対的にZ方向にずれた時のビームスポット73A,73B,73C、73DのY座標及びZ座標の変位量を示している。図18Eからわかるように集光アナモフィックレンズ31とレーザ光源1が相対的にZ方向に変化するとビームスポット73A,73B,73C、73DはY方向に変位しない。また、図18Fからわかるように集光アナモフィックレンズ31とレーザ光源1が相対的にZ方向に変化するとビームスポット73A,73B,73C、73DはZ方向を同じ方向に変位する。
次に図18A〜18Fでの変位に対して、像面7上のYZ平面上でビームスポット73A,73B,73C、73Dの軌跡をプロットしたものを図18G〜18Iに示す。
図18Gは集光アナモフィックレンズ31に対してレーザ光源1が相対的にX方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。放射状に変位する。
図18Hは集光アナモフィックレンズ31に対してレーザ光源1が相対的にY方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。Y方向を同じ方向に変位する。
図18Iは集光アナモフィックレンズ31に対してレーザ光源1が相対的にZ方向に0.02mmのピッチで±0.1mmずれた時のYZ平面上でのスポットの軌跡である。Z方向を同じ方向に変位する。
更に図18Jにはレーザ光源1が光軸(X)方向に±0.1mmずれた場合の像面7上のYZ平面上でビームスポット73A,73B,73C、73Dの軌跡をプロットしている。4つのビームスポットによって矩形が構成され、レーザ光源1が光軸(X)方向のズレによって矩形の大きさが変わる様に観測される。
以上のように。レーザ光源1と集光アナモフィックレンズ31の相対位置の変化量に対してビームスポット73A,73B,73C、73Dの間隔や位置の変化量は、リニアな比例関係がある。従ってビームスポット73A,73B,73C、73Dの座標を読み取り、間隔や位置の変化量を正確に計測すれば、レーザ光源1と集光アナモフィックレンズ31の相対位置が理想状態に対してどれだけずれているか算出可能である。
算出されたΔX、ΔY、ΔZに基づき、レーザ光源1を保持する不図示の工具ハンドを3次元的に駆動制御しレーザ光源1と集光アナモフィックレンズ31の相対位置を所望の精度に追い込んだ後、レーザ光源1は固定される。レーザ光源1や集光アナモフィックレンズ31をレーザホルダ2に固定する方法はねじ止めや勘合、接着など既知の方法による。
本発明の構成では、従来のようにビームスポット画像を読み込んでスポット径やピーク光量を算出するという工程を何度も回数を繰り返す必要がなく、1度ビームスポット画像を読み込んで演算処理することで3次元的な相対位置ずれ量を算出することが可能である。
また組み立てた光源ユニットのピントなどを再確認する際も少ない工数で確認できる。これにより組立工数を大幅に削減し低コストが可能となる。
上記した第1〜第4の実施例においては、調整対象である光源ユニット21内には絞り(第2の絞り)を含まない構成であり、前記光源ユニットが搭載される光走査装置内でのレーザ光源に対する絞り(第1の絞り)の位置と光学的に等価な調整装置内の位置に絞り4を設ける場合を例示して説明したが、本発明はこれに限定されることはない。光源ユニット21内に絞りを含む場合、すなわち、レーザ光源1と集光レンズ3の間の光路上に絞りが設置されている光源ユニットを調整対象とする場合には、本発明の調整装置は絞りを有する必要はなく、絞りを含む光源ユニットを本発明の調整装置の光源ユニットの取り付け部に固定することによって、本発明のメリットを享受して前記光源ユニットの調整をすることができることに留意されたい。
また、上記した第1〜第4の実施例においては、瞳分割素子を、出射面を同一の平面で構成し、入射面を互いに非平行な複数の平面から構成するものとして例示したが、本発明はこれに限定されることはない。入射面を同一の平面で構成し出射面を互いに非平行な複数の平面から構成される瞳分割素子としても良い。
さらに、上記した第1〜第4の実施例(数値実施例)においては、結像光学素子である工具レンズは、色消しのために2枚のレンズを接合した接合レンズとして例示したが、本発明はこの構成に限定されることはないことに留意されたい。
図19に本発明の第5の実施例における光走査装置の概略図であって、主走査断面での配置図を示す。光走査装置は、レーザ光源1、レーザホルダ2、集光レンズ3、絞り104、シリンダレンズ105、偏向器としてのポリゴンミラー106、第1走査レンズ107A、第2走査レンズ107Bからなる走査レンズ系107、カバーガラス108、被走査面(感光体)109を有する。またレーザースキャナ箱101内に、集光レンズ3、絞り104、シリンダレンズ105、ポリゴンミラー106、走査レンズ系107が収容されている。走査レンズ系107を経た光束は、カバーガラス108を介してレーザースキャナ箱101出射し、被走査面109を走査する。
第1走査レンズ107A、第2走査レンズ107Bは樹脂製の結像レンズである。
レーザ光源1から出射した発散光束は集光レンズ3によって平行光に変換される。平行光は絞り104により所望の光束幅に変換された後、シリンダレンズ105により副走査方向に収束する光束に変換され、偏向器106の偏向反射面近傍に集光する。よって偏向反射面近傍に光束は線像を形成している。
複数の偏向反射面で構成された偏向器106は、不図示の駆動系により図19の紙面に垂直な回転軸により回転駆動される。そして回転駆動する任意の偏向反射面で光束を偏向し走査レンズ系(Fθレンズ)107に導いている。
次に、走査レンズ系107の作用について述べる。走査光学系(Fθレンズ)は、樹脂製の第1結像レンズと樹脂製の第2結像レンズの2枚で構成される。偏向器106で反射偏向された光束を被走査面109上に結像しビームスポットを形成すると共に被走査面109上を等速で走査する。樹脂製の走査光学手段は、金型に樹脂を充填させ冷却後に型から取り出す既知の成形技術にて製造される。これによりガラスレンズを使用した従来の走査レンズより安価に製造できる。
主に主走査方向にパワーを有する第1の走査レンズ107Aは、レンズ面形状は既知の関数で表現された非球面形状である。第1の走査レンズ107Aは副走査断面内のパワーより主走査断面内のパワーの方が大きく、かつ、主走査断面が非円弧で偏向器106側に凹面を向けた凸メニスカス形状を有する。主走査断面内の形状は光軸に対して対称である。副走査方向に対しては入射面と出射面が同じ曲率の略ノンパワーであるが、例えば両面が副走査方向にフラットなシリンダー形状でもよい。入射した光束に対し主に主走査方向の結像を担う事になる。
一方の第2の走査レンズ107Bは主に副走査方向にパワーを持つアナモフィックレンズである。レンズ面形状は既知の関数で表現された非球面形状である。第2の走査レンズ107Bは主走査断面内のパワーより副走査断面内のパワーの方が大きく、かつ、主走査断面の入射面が円弧であり他の面が非円弧の形状をしている。第1、第2の走査レンズ107A、107Bからなる走査レンズ系107による副走査方向の結像関係は、偏向反射面と被走査面109が略共役関係となる所謂倒れ補正系となっている。
カバーガラス108は、紙面に垂直な副走査断面内で入射光束に対し角度を持つように傾けられている。これはカバーガラスでの表面反射光が光源に回帰しないようにするためである。表面反射光が光源に回帰してしまうと光源のレーザ発振が不安定になり光量が変動することがあるためである。
光源ユニット21はレーザ光源1と集光レンズ3はレーザホルダ2により保持されている。光源ユニット21はレーザ光源1と集光レンズ3の光軸方向及び光軸と直交する方向の相対位置の調整が可能であり、第1〜第4の実施例に示した調整装置により所望の精度で調整される。
レーザースキャナ箱101には、光源ユニット21と絞り104、シリンダレンズ105、偏向器としてのポリゴンミラー106、第1走査レンズ107A、第2走査レンズ107B、カバーガラス108が組みつけられている。レーザースキャナ箱101の光源ユニット取り付け座面102に勘合穴(不図示)があけられており、組立調整された光源ユニット21を組み付ける。
第1〜第4実施例に示した調整装置に光源ユニット21を取り付けるために、光源ユニット取り付け座面102や勘合穴(不図示)と同様の構成を調整装置に設けることで精度良い調整が可能となる。
本実施例では集光レンズ3とシリンダレンズ105の間に絞り104が設けられている。光源ユニット21の調整装置でも絞り104と光学的な等価な位置に絞り4を設けることが望ましい。具体的には光源1もしくは集光レンズ3からの光軸方向の距離が同じになるように、光走査装置の絞り104と第1〜第4の実施例に示した調整装置の絞り4を設ける。また絞り104と絞り4は同一形状の開口部を有している。
絞りの位置は必ずしも図19のように集光レンズ3とシリンダレンズ104の間でなくてもよい。例えばレーザ光源1と集光レンズ3の間とか、シリンダレンズ105と偏向器106の間、もしくはその両方に絞りを複数も受けてもよい。
レーザ光源1と集光レンズ3の間に絞り104を設ける場合はレーザホルダ2に作り込むとコストダウンになる。レーザホルダ2内に絞り104が構成された光源ユニット21のレーザ光源1と集光レンズ3の位置を調整するために用いられる調整装置においては、絞り4は不要となる。シリンダレンズ105と偏向器106の間に絞り104を有する光走査装置に使用される光源ユニット21のレーザ光源1と集光レンズ3の位置を調整するための調整装置においては、光走査装置内でのレーザ光源1に対する絞り104と光学的に等価な調整装置内の位置に絞り4を設けることが望ましい。具体的にはレーザ光源1もしくは集光レンズ3からの光軸方向の距離が同じになるように、光走査装置の絞り104と第1〜第4の実施例に示した調整装置の絞り4を設ける。また絞り104と絞り4は同一形状の開口部を有している。
レーザ光源1はシングルビームタイプでもモノリシックマルチビームタイプでも、VCSEL(面発光レーザ)でもよい。
本発明に係るレーザ光源と集光光学素子の相対位置調整の調整装置は、前記レーザ光源と集光光学素子からなる光源ユニットが光走査装置に搭載され使用されることを前提として記載したが、本発明の調整装置はこれに限定されることはない。光走査装置以外の光源ユニットのレーザ光源と集光光学素子の相対位置を調整するために使用しても、本発明の効果を享受することができる。
以上、本発明の好ましい実施例について説明したが、本発明はこれらの実施例に限定されず、その要旨の範囲内で種々の変形および変更が可能である。