JP2012060418A - 弾性表面波デバイス、電子機器及びセンサー装置 - Google Patents
弾性表面波デバイス、電子機器及びセンサー装置 Download PDFInfo
- Publication number
- JP2012060418A JP2012060418A JP2010201749A JP2010201749A JP2012060418A JP 2012060418 A JP2012060418 A JP 2012060418A JP 2010201749 A JP2010201749 A JP 2010201749A JP 2010201749 A JP2010201749 A JP 2010201749A JP 2012060418 A JP2012060418 A JP 2012060418A
- Authority
- JP
- Japan
- Prior art keywords
- idt
- saw
- angle
- electrode
- acoustic wave
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















Classifications
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/02535—Details of surface acoustic wave devices
- H03H9/02543—Characteristics of substrate, e.g. cutting angles
- H03H9/02551—Characteristics of substrate, e.g. cutting angles of quartz substrates
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/05—Holders; Supports
- H03H9/0538—Constructional combinations of supports or holders with electromechanical or other electronic elements
- H03H9/0542—Constructional combinations of supports or holders with electromechanical or other electronic elements consisting of a lateral arrangement
-
- H—ELECTRICITY
- H03—ELECTRONIC CIRCUITRY
- H03H—IMPEDANCE NETWORKS, e.g. RESONANT CIRCUITS; RESONATORS
- H03H9/00—Networks comprising electromechanical or electro-acoustic devices; Electromechanical resonators
- H03H9/02—Details
- H03H9/125—Driving means, e.g. electrodes, coils
- H03H9/145—Driving means, e.g. electrodes, coils for networks using surface acoustic waves
- H03H9/14544—Transducers of particular shape or position
- H03H9/14594—Plan-rotated or plan-tilted transducers
Abstract
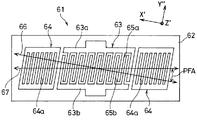
【解決手段】SAWデバイス11は、オイラー角(−1.5°≦φ≦1.5°,117°≦θ≦142°,42.79°≦|ψ|≦49.57°)の水晶基板12の主面に、ストップバンド上端モードのSAWを励振するIDT13、その両側に配置した一対の反射器14、IDTの電極指15a,15b間に凹設した電極指間溝17、及び反射器の導体ストリップ14a間に凹設した導体ストリップ間溝18を有する。電極指及び導体ストリップに直交する第1の方向(X´軸)と水晶基板の電機軸(X軸)とが角度ψをもって交差し、IDT及び反射器の少なくとも一部が、1.0°≦α≦2.75°の角度αをもって第1の方向と交差する第2の方向に配置される。
【選択図】図6
Description
H/λ≧0.1796η3−0.4303η2+0.2071η+0.0682
に設定することが開示されている。これによって、レイリー波をストップバンドの上限モードで励振させ、良好な周波数温度特性を実現することができる。
SAWの波長をλ、電極指間溝の深さをGとした場合に、0.01λ≦Gの関係を満たし、
かつ、IDTのライン占有率をηとした場合に、電極指間溝の深さGとライン占有率ηとが
の関係を満たすことを特徴とする。

の関係を満たすことを特徴とする。これにより、周波数温度特性の二次温度係数を小さく抑制することができる。
Δf=α×(T−T0)+β×(T−T0)2
ここで、Δfは温度Tと頂点温度T0間の周波数変化量(ppm)、αは1次温度係数(ppm/℃)、βは2次温度係数(ppm/℃2)、Tは温度、T0は周波数が最大となる温度(頂点温度)である。2次温度係数βの絶対値を最小に、好ましくは0.01(ppm/℃2)以下に、より好ましくは略零になるように設定して、周波数温度特性が三次曲線を示すようにすれば、広い動作温度範囲でも周波数変動量を小さくして高い周波数安定性が得られる。
−本実施形態のSAW共振子1の基本データ
H:0.02λ
G:変化
IDTライン占有率η:0.6
反射器ライン占有率ηr:0.8
オイラー角:(0°,123°,43.5°)
IDT対数:120
電極指交差幅:40λ(λ=10μm)
反射器本数(片側あたり):60
電極指の傾斜角度:なし
H:変化
G:ゼロ(無し)
IDTライン占有率η:0.4
反射器ライン占有率ηr:0.3
オイラー角(0°,123°,43.5°)
IDT対数:120
電極指交差幅:40λ(λ=10μm)
反射器本数(片側あたり):60
電極指の傾斜角度:なし
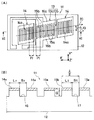
該水晶基板の主面に設けられた複数の電極指からなり、ストップバンド上端モードの弾性表面波を励振するIDTと、
弾性表面波の伝播方向に沿ってIDTを挟むようにその両側に配置した、それぞれ複数の導体ストリップからなる一対の反射器と、
IDTの隣り合う電極指間の水晶基板の表面に凹設した電極指間溝と、
反射器の隣り合う導体ストリップ間の水晶基板の表面に凹設した導体ストリップ間溝とを有し、
弾性表面波の波長λと電極指間溝の深さGとが、0.01λ≦Gの関係を満足し、
IDTのライン占有率ηと電極指間溝の深さGとが、
電極指及び導体ストリップに直交する第1の方向と水晶基板の電機軸とのなす角度がオイラー角ψであり、
IDT及び反射器の少なくとも一部が、第1の方向と角度αをもって交差する第2の方向に配置され、かつこの角度αが1.0°≦α≦2.75°の範囲内にあることを特徴とする。
SAW共振子11の仕様を次のように設定した。
水晶基板寸法:5.0×1.5(mm)
オイラー角:(0°,123°,45.8°)
IDT対数:180
反射器本数(片側あたり): 78
SAW波長λ:7.9(μm)、
電極材料:Al
電極指膜厚H:0.02λ(2%λ)=0.1580(μm)
電極指ピッチPt:λ/2=3.95(μm)、
電極指線幅Lt:0.625Pt=2.4688(μm)
(ライン占有率η:0.625)
電極材料:Al
導体ストリップ膜厚H:2%λ(0.02λ)=0.1580(μm)
導体ストリップピッチPr:λ/2=3.95(μm)、
導体ストリップ線幅:0.625Pt=2.4688(μm)
(ライン占有率η:0.625)
深さ:0.045λ(4.5%λ)=0.3555(μm)
電極指実効膜厚:0.065λ(6.5%λ)=0.5135(μm)
ψ=1.06α+43.69° …(4)
を満足することが判明した。更に、|β|≦0.01となる傾斜角αとオイラー角ψとの関係を検証したところ、それらは次の条件式、
ψ=1.06α+43.69°±0.05° …(5)
を満足することが判明した。
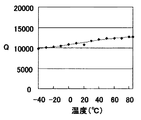
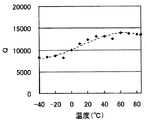
上記実施例1において、反射器14の導体ストリップ線幅を0.725Pr(=2.8638μm)、ライン占有率をηr=0.725に変更した。実施例2について、IDTの傾斜角α=0°,1.0°,1.5°,2.0°,2.5°,3.0°とした場合に、−40℃〜+85℃の広い動作温度範囲におけるQ値の変化をシミュレーションした。その結果を図11−1乃至図11−6に示す。
Claims (7)
- オイラー角(−1.5°≦φ≦1.5°,117°≦θ≦142°,42.79°≦|ψ|≦49.57°)の水晶基板と、
前記水晶基板の主面に設けられた複数の電極指からなり、ストップバンド上端モードの弾性表面波を励振するIDTと、
前記弾性表面波の伝播方向に沿って前記IDTを挟むようにその両側に配置した、それぞれ複数の導体ストリップからなる一対の反射器と、
前記IDTの隣り合う前記電極指間の前記水晶基板の表面に凹設した電極指間溝と、
前記反射器の隣り合う前記導体ストリップ間の前記水晶基板の表面に凹設した導体ストリップ間溝とを有し、
前記弾性表面波の波長λと前記電極指間溝の深さGとが、0.01λ≦Gの関係を満足し、
前記IDTのライン占有率ηと前記電極指間溝の深さGとが、
前記電極指及び前記導体ストリップに直交する第1の方向と前記水晶基板の電機軸とのなす角度が前記オイラー角ψであり、
前記IDT及び反射器の少なくとも一部が、前記第1の方向と角度αをもって交差する第2の方向に配置され、かつ前記角度αが1.0°≦α≦2.75°の範囲内にあることを特徴とする弾性表面波デバイス。 - 前記角度αと前記オイラー角ψとが、ψ=1.06α+43.69°+0.05°の関係を満足することを特徴とする請求項1記載の弾性表面波デバイス。
- 前記IDTのライン占有率ηが、
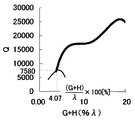
- 前記電極指間溝の深さGと前記電極指の膜厚Hとの和が、0.0407λ≦G+Hを満足することを特徴とする請求項1乃至3のいずれか記載の弾性表面波デバイス。
- 前記IDTを駆動するためのICを更に有することを特徴とする請求項1乃至4のいずれか記載の弾性表面波デバイス。
- 請求項1乃至5のいずれか記載の弾性表面波デバイスを備えることを特徴とする電子機器。
- 請求項1乃至5のいずれか記載の弾性表面波デバイスを備えることを特徴とするセンサー装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010201749A JP2012060418A (ja) | 2010-09-09 | 2010-09-09 | 弾性表面波デバイス、電子機器及びセンサー装置 |
| CN201110247975.0A CN102403978B (zh) | 2010-09-09 | 2011-08-26 | 声表面波器件、电子设备及传感器装置 |
| US13/223,530 US8723395B2 (en) | 2010-09-09 | 2011-09-01 | Surface acoustic wave device, electronic apparatus, and sensor apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010201749A JP2012060418A (ja) | 2010-09-09 | 2010-09-09 | 弾性表面波デバイス、電子機器及びセンサー装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012060418A true JP2012060418A (ja) | 2012-03-22 |
| JP2012060418A5 JP2012060418A5 (ja) | 2013-10-17 |
Family
ID=45805968
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010201749A Pending JP2012060418A (ja) | 2010-09-09 | 2010-09-09 | 弾性表面波デバイス、電子機器及びセンサー装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8723395B2 (ja) |
| JP (1) | JP2012060418A (ja) |
| CN (1) | CN102403978B (ja) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4645923B2 (ja) | 2009-02-27 | 2011-03-09 | セイコーエプソン株式会社 | 弾性表面波共振子、および弾性表面波発振器 |
| EP2403141B1 (en) * | 2009-02-27 | 2018-10-24 | Seiko Epson Corporation | Surface acoustic wave resonator, surface acoustic wave oscillator, and electronic device |
| JP5678486B2 (ja) | 2010-06-17 | 2015-03-04 | セイコーエプソン株式会社 | 弾性表面波共振子、弾性表面波発振器および電子機器 |
| JP5934464B2 (ja) | 2010-08-26 | 2016-06-15 | セイコーエプソン株式会社 | 弾性表面波共振子、および弾性表面波発振器、ならびに電子機器 |
| JP2012049817A (ja) | 2010-08-26 | 2012-03-08 | Seiko Epson Corp | 弾性表面波デバイス、および弾性表面波発振器、ならびに電子機器 |
| JP2012049818A (ja) | 2010-08-26 | 2012-03-08 | Seiko Epson Corp | 弾性表面波共振子、弾性表面波発振器、電子機器 |
| JP2012060419A (ja) | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060418A (ja) | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060421A (ja) | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060420A (ja) | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060422A (ja) * | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| CN105393455B (zh) * | 2013-06-28 | 2017-04-12 | 大河晶振科技有限公司 | 弹性波元件 |
| DE112014006013T5 (de) * | 2013-12-26 | 2016-09-08 | Murata Manufacturing Co., Ltd. | Vorrichtung für elastische Wellen und Filtervorrichtung |
| CN105245199B (zh) * | 2015-10-28 | 2018-08-03 | 江苏声立传感技术有限公司 | 应用于无线温度传感器的高q值单端对声表面波谐振器 |
| CN107241077B (zh) * | 2017-05-12 | 2020-12-29 | 电子科技大学 | 一种压电薄膜体声波谐振器及其制备方法 |
| US11621691B2 (en) * | 2018-07-16 | 2023-04-04 | Qorvo Us, Inc. | Reflective structures for surface acoustic wave devices |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS575418A (en) * | 1980-06-13 | 1982-01-12 | Nippon Telegr & Teleph Corp <Ntt> | Cavity type surface elastic wave resonator |
| JPS5799813A (en) * | 1980-12-13 | 1982-06-21 | Nippon Telegr & Teleph Corp <Ntt> | Surface acoustic wave resonator |
| JPS6468114A (en) * | 1987-09-09 | 1989-03-14 | Hiroshi Shimizu | Structure for idt exciting type piezoelectric resonator |
| JP3216137B2 (ja) * | 1994-09-29 | 2001-10-09 | セイコーエプソン株式会社 | Sawデバイス |
| JP2003188675A (ja) * | 2001-12-19 | 2003-07-04 | Alps Electric Co Ltd | 表面弾性波素子及びそれを備えたデュプレクサ |
| JP2005204275A (ja) * | 2003-12-12 | 2005-07-28 | Seiko Epson Corp | 弾性表面波素子片およびその製造方法並びに弾性表面波装置 |
| JP2006203408A (ja) * | 2005-01-19 | 2006-08-03 | Epson Toyocom Corp | 弾性表面波デバイス |
| JP2009225420A (ja) * | 2008-02-20 | 2009-10-01 | Epson Toyocom Corp | 弾性表面波デバイスおよび弾性表面波発振器 |
| JP2010016523A (ja) * | 2008-07-02 | 2010-01-21 | Murata Mfg Co Ltd | 弾性波共振子及びラダー型フィルタ |
| JP2010103720A (ja) * | 2008-10-23 | 2010-05-06 | Epson Toyocom Corp | 弾性表面波デバイス |
| WO2010098139A1 (ja) * | 2009-02-27 | 2010-09-02 | エプソントヨコム株式会社 | 弾性表面波共振子、弾性表面波発振器、及び電子機器 |
Family Cites Families (41)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| GB2078042B (en) | 1980-06-13 | 1984-08-08 | Nippon Telegraph & Telephone | Surface acoustic wave resonator |
| JPS6192011A (ja) | 1984-10-11 | 1986-05-10 | Nec Kansai Ltd | 弾性表面波素子の製造方法 |
| JPS6388910A (ja) | 1986-10-02 | 1988-04-20 | Toyo Commun Equip Co Ltd | 弾性表面波共振子 |
| JPS6434411A (en) | 1987-07-29 | 1989-02-03 | Hitachi Ltd | Controlling device for injection amount of flocculant in purification plant |
| JPH01231412A (ja) | 1988-03-11 | 1989-09-14 | Fujitsu Ltd | 弾性表面波ディバイスの周波数特性調整方法 |
| JPH02189011A (ja) | 1989-01-18 | 1990-07-25 | Fujitsu Ltd | 弾性表面波デバイスの製造方法 |
| JP2839104B2 (ja) | 1990-01-20 | 1998-12-16 | 株式会社シマノ | 釣用リールの変速装置 |
| JPH03266846A (ja) | 1990-03-16 | 1991-11-27 | Konica Corp | 感光性平版印刷版の処理方法及び処理装置 |
| JPH0590865A (ja) | 1991-09-30 | 1993-04-09 | Oki Electric Ind Co Ltd | 弾性表面波フイルタの中心周波数調整方法 |
| JP3411124B2 (ja) | 1994-05-13 | 2003-05-26 | 松下電器産業株式会社 | 弾性表面波モジュール素子の製造方法 |
| US5815900A (en) | 1995-03-06 | 1998-10-06 | Matsushita Electric Industrial Co., Ltd. | Method of manufacturing a surface acoustic wave module |
| JPH10270974A (ja) | 1997-03-25 | 1998-10-09 | Kenwood Corp | 表面弾性波素子 |
| JP3266846B2 (ja) | 1998-01-20 | 2002-03-18 | 東洋通信機株式会社 | 反射反転型弾性表面波変換器及びフィルタ |
| WO2001037426A1 (fr) | 1999-11-16 | 2001-05-25 | Mitsubishi Denki Kabushiki Kaisha | Dispositif a onde elastique |
| JP2002100959A (ja) | 2000-09-25 | 2002-04-05 | Toyo Commun Equip Co Ltd | 弾性表面波デバイス |
| AUPR507601A0 (en) * | 2001-05-21 | 2001-06-14 | Microtechnology Centre Management Limited | Surface acoustic wave sensor |
| JP3622202B2 (ja) | 2001-08-29 | 2005-02-23 | セイコーエプソン株式会社 | 弾性表面波装置の温度特性調整方法 |
| JP2003283282A (ja) | 2002-01-15 | 2003-10-03 | Murata Mfg Co Ltd | 電極を有する電子部品、及びその製造方法、通信装置 |
| JP3826877B2 (ja) | 2002-01-22 | 2006-09-27 | 株式会社村田製作所 | 弾性表面波装置およびそれを有する通信装置 |
| JP2004274696A (ja) * | 2002-10-04 | 2004-09-30 | Seiko Epson Corp | 弾性表面波装置および弾性表面波装置の温度特性調整方法 |
| JP4306458B2 (ja) * | 2003-03-20 | 2009-08-05 | セイコーエプソン株式会社 | 電圧制御型発振器、クロック変換器及び電子機器 |
| JP4246604B2 (ja) | 2003-11-18 | 2009-04-02 | 富士通メディアデバイス株式会社 | 弾性表面波デバイス |
| US7589451B2 (en) | 2004-04-01 | 2009-09-15 | Epson Toyocom Corporation | Surface acoustic wave device |
| JP2006013576A (ja) | 2004-06-22 | 2006-01-12 | Epson Toyocom Corp | Sawデバイスとこれを用いた装置 |
| JP2006148622A (ja) | 2004-11-22 | 2006-06-08 | Seiko Epson Corp | 弾性表面波装置および電子機器 |
| EP1675260A3 (en) * | 2004-12-03 | 2007-08-15 | Epson Toyocom Corporation | Surface acoustic wave device |
| JP3851336B1 (ja) | 2005-05-31 | 2006-11-29 | 隆彌 渡邊 | 弾性表面波装置 |
| JPWO2006137464A1 (ja) | 2005-06-21 | 2009-01-22 | エプソントヨコム株式会社 | 弾性表面波デバイス、モジュール、及び発振器 |
| JP4412292B2 (ja) * | 2006-02-06 | 2010-02-10 | セイコーエプソン株式会社 | 弾性表面波装置および電子機器 |
| JP2007267033A (ja) | 2006-03-28 | 2007-10-11 | Epson Toyocom Corp | 弾性表面波素子及び弾性表面波デバイス |
| JP4968510B2 (ja) * | 2006-04-27 | 2012-07-04 | セイコーエプソン株式会社 | 弾性表面波素子片の周波数温度特性調整方法、及び弾性表面波素子片、並びに弾性表面波デバイス |
| JP2007300287A (ja) | 2006-04-28 | 2007-11-15 | Epson Toyocom Corp | 弾性表面波素子および弾性表面波デバイス並びに電子機器 |
| US7504705B2 (en) | 2006-09-29 | 2009-03-17 | International Business Machines Corporation | Striped on-chip inductor |
| JP4645923B2 (ja) | 2009-02-27 | 2011-03-09 | セイコーエプソン株式会社 | 弾性表面波共振子、および弾性表面波発振器 |
| JP5678486B2 (ja) | 2010-06-17 | 2015-03-04 | セイコーエプソン株式会社 | 弾性表面波共振子、弾性表面波発振器および電子機器 |
| JP5934464B2 (ja) | 2010-08-26 | 2016-06-15 | セイコーエプソン株式会社 | 弾性表面波共振子、および弾性表面波発振器、ならびに電子機器 |
| JP2012060418A (ja) | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060420A (ja) * | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060421A (ja) * | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP2012060422A (ja) | 2010-09-09 | 2012-03-22 | Seiko Epson Corp | 弾性表面波デバイス、電子機器及びセンサー装置 |
| JP5648908B2 (ja) | 2010-12-07 | 2015-01-07 | セイコーエプソン株式会社 | 振動デバイス、並びに発振器、および電子機器 |
-
2010
- 2010-09-09 JP JP2010201749A patent/JP2012060418A/ja active Pending
-
2011
- 2011-08-26 CN CN201110247975.0A patent/CN102403978B/zh not_active Expired - Fee Related
- 2011-09-01 US US13/223,530 patent/US8723395B2/en active Active
Patent Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS575418A (en) * | 1980-06-13 | 1982-01-12 | Nippon Telegr & Teleph Corp <Ntt> | Cavity type surface elastic wave resonator |
| JPS5799813A (en) * | 1980-12-13 | 1982-06-21 | Nippon Telegr & Teleph Corp <Ntt> | Surface acoustic wave resonator |
| JPS6468114A (en) * | 1987-09-09 | 1989-03-14 | Hiroshi Shimizu | Structure for idt exciting type piezoelectric resonator |
| JP3216137B2 (ja) * | 1994-09-29 | 2001-10-09 | セイコーエプソン株式会社 | Sawデバイス |
| JP2003188675A (ja) * | 2001-12-19 | 2003-07-04 | Alps Electric Co Ltd | 表面弾性波素子及びそれを備えたデュプレクサ |
| JP2005204275A (ja) * | 2003-12-12 | 2005-07-28 | Seiko Epson Corp | 弾性表面波素子片およびその製造方法並びに弾性表面波装置 |
| JP2006203408A (ja) * | 2005-01-19 | 2006-08-03 | Epson Toyocom Corp | 弾性表面波デバイス |
| JP2009225420A (ja) * | 2008-02-20 | 2009-10-01 | Epson Toyocom Corp | 弾性表面波デバイスおよび弾性表面波発振器 |
| JP2010016523A (ja) * | 2008-07-02 | 2010-01-21 | Murata Mfg Co Ltd | 弾性波共振子及びラダー型フィルタ |
| JP2010103720A (ja) * | 2008-10-23 | 2010-05-06 | Epson Toyocom Corp | 弾性表面波デバイス |
| WO2010098139A1 (ja) * | 2009-02-27 | 2010-09-02 | エプソントヨコム株式会社 | 弾性表面波共振子、弾性表面波発振器、及び電子機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102403978B (zh) | 2015-04-01 |
| US20120062069A1 (en) | 2012-03-15 |
| US8723395B2 (en) | 2014-05-13 |
| CN102403978A (zh) | 2012-04-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012060418A (ja) | 弾性表面波デバイス、電子機器及びセンサー装置 | |
| US8723394B2 (en) | Surface acoustic wave device, electronic apparatus, and sensor apparatus | |
| JP5678486B2 (ja) | 弾性表面波共振子、弾性表面波発振器および電子機器 | |
| JP2012060422A (ja) | 弾性表面波デバイス、電子機器及びセンサー装置 | |
| US9048806B2 (en) | Surface acoustic wave device, electronic apparatus, and sensor apparatus | |
| JP5574200B2 (ja) | 弾性表面波共振子、弾性表面波発振器、及び電子機器 | |
| JP4591800B2 (ja) | 弾性表面波デバイスおよび弾性表面波発振器 | |
| JP2012060419A (ja) | 弾性表面波デバイス、電子機器及びセンサー装置 | |
| EP2224591B1 (en) | Surface acoustic wave resonator and surface acoustic wave oscillator | |
| JP5934464B2 (ja) | 弾性表面波共振子、および弾性表面波発振器、ならびに電子機器 | |
| JP5652606B2 (ja) | 弾性表面波共振子、弾性表面波発振器、及び電子機器 | |
| JP2007300287A (ja) | 弾性表面波素子および弾性表面波デバイス並びに電子機器 | |
| JP2012124677A (ja) | 振動デバイス、並びに発振器、および電子機器 | |
| JP2012049817A (ja) | 弾性表面波デバイス、および弾性表面波発振器、ならびに電子機器 | |
| JP2012060417A (ja) | 弾性表面波デバイス、電子機器及びセンサー装置 | |
| JP5850109B2 (ja) | 弾性表面波共振子、弾性表面波発振器、及び電子機器 | |
| JP5737490B2 (ja) | トランスバーサル型弾性表面波デバイス、弾性表面波発振器および電子機器 | |
| JP2015084534A (ja) | 二端子対弾性表面波共振子、弾性表面波発振器および電子機器 | |
| JP5750683B2 (ja) | 二端子対弾性表面波共振子、弾性表面波発振器および電子機器 | |
| JP2015029358A (ja) | 弾性表面波共振子、弾性表面波発振器および電子機器 | |
| JP2012049631A (ja) | 弾性表面波共振子、弾性表面波発振器、電子機器 | |
| JP2015084535A (ja) | トランスバーサル型弾性表面波デバイス、弾性表面波発振器および電子機器 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20120726 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130830 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130830 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140304 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140430 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140805 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20141003 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20141003 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20150224 |