JP2010025160A - 車両の制御装置 - Google Patents
車両の制御装置 Download PDFInfo
- Publication number
- JP2010025160A JP2010025160A JP2008184310A JP2008184310A JP2010025160A JP 2010025160 A JP2010025160 A JP 2010025160A JP 2008184310 A JP2008184310 A JP 2008184310A JP 2008184310 A JP2008184310 A JP 2008184310A JP 2010025160 A JP2010025160 A JP 2010025160A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- shift
- driving force
- abnormality
- range
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/0225—Failure correction strategy
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/02—Ensuring safety in case of control system failures, e.g. by diagnosing, circumventing or fixing failures
- B60W50/038—Limiting the input power, torque or speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/662—Electrical control in fluid-pressure brake systems characterised by specified functions of the control system components
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T13/00—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems
- B60T13/10—Transmitting braking action from initiating means to ultimate brake actuator with power assistance or drive; Brake systems incorporating such transmitting means, e.g. air-pressure brake systems with fluid assistance, drive, or release
- B60T13/66—Electrical control in fluid-pressure brake systems
- B60T13/68—Electrical control in fluid-pressure brake systems by electrically-controlled valves
- B60T13/686—Electrical control in fluid-pressure brake systems by electrically-controlled valves in hydraulic systems or parts thereof
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60T—VEHICLE BRAKE CONTROL SYSTEMS OR PARTS THEREOF; BRAKE CONTROL SYSTEMS OR PARTS THEREOF, IN GENERAL; ARRANGEMENT OF BRAKING ELEMENTS ON VEHICLES IN GENERAL; PORTABLE DEVICES FOR PREVENTING UNWANTED MOVEMENT OF VEHICLES; VEHICLE MODIFICATIONS TO FACILITATE COOLING OF BRAKES
- B60T7/00—Brake-action initiating means
- B60T7/12—Brake-action initiating means for automatic initiation; for initiation not subject to will of driver or passenger
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/04—Conjoint control of vehicle sub-units of different type or different function including control of propulsion units
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/10—Conjoint control of vehicle sub-units of different type or different function including control of change-speed gearings
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W10/00—Conjoint control of vehicle sub-units of different type or different function
- B60W10/18—Conjoint control of vehicle sub-units of different type or different function including control of braking systems
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W50/00—Details of control systems for road vehicle drive control not related to the control of a particular sub-unit, e.g. process diagnostic or vehicle driver interfaces
- B60W50/08—Interaction between the driver and the control system
- B60W50/14—Means for informing the driver, warning the driver or prompting a driver intervention
- B60W50/16—Tactile feedback to the driver, e.g. vibration or force feedback to the driver on the steering wheel or the accelerator pedal
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe ; Circumventing or fixing failures
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors , actuators or related electrical control means therefor
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2520/00—Input parameters relating to overall vehicle dynamics
- B60W2520/10—Longitudinal speed
- B60W2520/105—Longitudinal acceleration
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/10—Accelerator pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2540/00—Input parameters relating to occupants
- B60W2540/12—Brake pedal position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2710/00—Output or target parameters relating to a particular sub-units
- B60W2710/10—Change speed gearings
- B60W2710/1005—Transmission ratio engaged
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18036—Reversing
- B60W30/18045—Rocking, i.e. fast change between forward and reverse
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/44—Inputs being a function of speed dependent on machine speed, e.g. the vehicle speed
- F16H2059/446—Detecting vehicle stop, i.e. the vehicle is at stand still, e.g. for engaging parking lock
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/12—Detecting malfunction or potential malfunction, e.g. fail safe ; Circumventing or fixing failures
- F16H2061/1232—Bringing the control into a predefined state, e.g. giving priority to particular actuators or gear ratios
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H61/00—Control functions within control units of change-speed- or reversing-gearings for conveying rotary motion ; Control of exclusively fluid gearing, friction gearing, gearings with endless flexible members or other particular types of gearing
- F16H61/26—Generation or transmission of movements for final actuating mechanisms
- F16H61/28—Generation or transmission of movements for final actuating mechanisms with at least one movement of the final actuating mechanism being caused by a non-mechanical force, e.g. power-assisted
- F16H61/32—Electric motors , actuators or related electrical control means therefor
- F16H2061/326—Actuators for range selection, i.e. actuators for controlling the range selector or the manual range valve in the transmission
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/02—Selector apparatus
- F16H59/08—Range selector apparatus
- F16H59/10—Range selector apparatus comprising levers
- F16H59/105—Range selector apparatus comprising levers consisting of electrical switches or sensors
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/14—Inputs being a function of torque or torque demand
- F16H59/24—Inputs being a function of torque or torque demand dependent on the throttle opening
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/36—Inputs being a function of speed
- F16H59/44—Inputs being a function of speed dependent on machine speed, e.g. the vehicle speed
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/48—Inputs being a function of acceleration
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16H—GEARING
- F16H59/00—Control inputs to control units of change-speed- or reversing-gearings for conveying rotary motion
- F16H59/50—Inputs being a function of the status of the machine, e.g. position of doors or safety belts
- F16H59/54—Inputs being a function of the status of the machine, e.g. position of doors or safety belts dependent on signals from the brakes, e.g. parking brakes
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transportation (AREA)
- Automation & Control Theory (AREA)
- General Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Human Computer Interaction (AREA)
- Control Of Transmission Device (AREA)
- Regulating Braking Force (AREA)
- Gear-Shifting Mechanisms (AREA)
Abstract
【解決手段】シフトバイワイヤシステムの異常が検出され、且つ、車両停止が予測された場合、車両の駆動力を抑制する駆動力抑制手段134を備えるため、駆動力の抑制が車両停止が予測された場合のみ実施される。この状態では、仮に前後進切替操作が為されたときにシフトバイワイヤシステムの異常により前後進誤作動が発生しても、駆動力抑制手段134によって車両の駆動力が抑制されているため、運転者がアクセルを踏み込んでも車両の動き出しが鈍くなる。これより、車両の移動を最小限に抑制して、運転者がその異常に気付くことができる。
【選択図】図6
Description
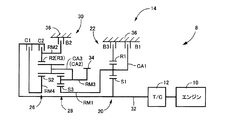
68:SBWアクチュエータ(シフト切替手段)
122:異常検出手段
134:駆動力抑制手段
Claims (9)
- レンジ切替信号をシフト切替装置に入力することにより、車両用変速機の走行レンジを切り換えるシフトバイワイヤシステムを有する車両の制御装置であって、
前記シフトバイワイヤシステムの異常を検出する異常検出手段を備え、
前記シフトバイワイヤシステムの異常が検出され、且つ、車両停止が予測された場合、車両の駆動力を抑制する駆動力抑制手段を備えることを特徴とする車両の制御装置。 - 前記車両停止の予測は、車速が所定値以下のときであることを特徴とする請求項1の車両の制御装置。
- 前記車両停止の予測は、ブレーキがオン操作されているときであることを特徴とする請求項1の車両の制御装置。
- 前記車両停止の予測は、車両の減速度が所定値以上のときであることを特徴とする請求項1の車両の制御装置。
- 前記駆動力抑制手段は、前記車両用変速機のギヤ段を高速ギヤ段側に切り替えることを特徴とする請求項1の車両の制御装置。
- 前記駆動力抑制手段は、車両の再発進が予測されると、車両の駆動力の抑制を中止することを特徴とする請求項1の車両の制御装置。
- 前記車両の再発進の予測は、車両の車速が所定値以上のときであることを特徴とする請求項6の車両の制御装置。
- 前記車両の再発進の予測は、アクセル開度が所定値以上のときであることを特徴とする請求項6の車両の制御装置。
- 前記車両の再発進の予測は、ブレーキがオフ操作されたときであることを特徴とする請求項6の車両の制御装置。
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184310A JP5131066B2 (ja) | 2008-07-15 | 2008-07-15 | 車両の制御装置 |
| CN200980127455.7A CN102089197B (zh) | 2008-07-15 | 2009-07-10 | 车辆的控制装置 |
| KR1020117003342A KR101265839B1 (ko) | 2008-07-15 | 2009-07-10 | 차량의 제어 장치 |
| US13/054,436 US8577567B2 (en) | 2008-07-15 | 2009-07-10 | Vehicle control device |
| PCT/JP2009/062638 WO2010007957A1 (ja) | 2008-07-15 | 2009-07-10 | 車両の制御装置 |
| EP09797882.9A EP2311706B1 (en) | 2008-07-15 | 2009-07-10 | Vehicular control apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008184310A JP5131066B2 (ja) | 2008-07-15 | 2008-07-15 | 車両の制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010025160A true JP2010025160A (ja) | 2010-02-04 |
| JP5131066B2 JP5131066B2 (ja) | 2013-01-30 |
Family
ID=41550360
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008184310A Expired - Fee Related JP5131066B2 (ja) | 2008-07-15 | 2008-07-15 | 車両の制御装置 |
Country Status (6)
| Country | Link |
|---|---|
| US (1) | US8577567B2 (ja) |
| EP (1) | EP2311706B1 (ja) |
| JP (1) | JP5131066B2 (ja) |
| KR (1) | KR101265839B1 (ja) |
| CN (1) | CN102089197B (ja) |
| WO (1) | WO2010007957A1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018075904A (ja) * | 2016-11-08 | 2018-05-17 | トヨタ自動車株式会社 | 車両制御装置 |
| CN115056768A (zh) * | 2022-04-26 | 2022-09-16 | 一汽奔腾轿车有限公司 | 一种防前碰撞预警误报的控制方法、系统、设备及存储介质 |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8510004B2 (en) * | 2009-03-06 | 2013-08-13 | Eaton Corporation | Transmission control module with valve control |
| CN103348164B (zh) * | 2011-02-14 | 2015-08-12 | 丰田自动车株式会社 | 车辆的控制装置 |
| DE102011018875A1 (de) * | 2011-04-28 | 2012-10-31 | Audi Ag | Bedieneinrichtung zur Steuerung des Betriebs eines einen Elektromotor umfassenden Kraftfahrzeugs und Kraftfahrzeug |
| US9091340B2 (en) | 2011-05-11 | 2015-07-28 | GM Global Technology Operations LLC | Latching shifter with override feature |
| JP5856778B2 (ja) * | 2011-08-08 | 2016-02-10 | アイシン・エーアイ株式会社 | 動力伝達装置の制御装置 |
| CN102390379B (zh) * | 2011-08-26 | 2014-12-10 | 三一汽车制造有限公司 | 一种车辆、车辆起步控制方法及控制系统 |
| DE102011082033A1 (de) * | 2011-09-02 | 2013-03-07 | Zf Friedrichshafen Ag | Shift-By-Wire-System |
| US8960040B2 (en) * | 2011-09-14 | 2015-02-24 | GM Global Technology Operations LLC | Electronic shifter with adaptive position |
| CN103115767A (zh) * | 2011-11-16 | 2013-05-22 | 中国北方车辆研究所 | 传动装置换挡试验的档位识别方法 |
| JP5747808B2 (ja) * | 2011-12-21 | 2015-07-15 | トヨタ自動車株式会社 | 車両の駆動制御装置 |
| US9611797B2 (en) * | 2012-10-30 | 2017-04-04 | National Instruments Corporation | Direct injection flexible multiplexing scheme |
| DE102013201355B4 (de) * | 2013-01-29 | 2025-03-13 | Robert Bosch Gmbh | Steuern des Treibstoffdrucks in einer Einspritzanlage |
| US9156475B2 (en) * | 2013-05-07 | 2015-10-13 | Denso Corporation | Actuator control apparatus |
| CN104343956B (zh) * | 2014-09-15 | 2016-08-24 | 山东理工大学 | 多挡线控自动变速器的变电流起步控制方法 |
| US10005463B2 (en) | 2014-12-03 | 2018-06-26 | Ford Global Technologies, Llc | System and method for generating vacuum via an engine |
| JP6578734B2 (ja) * | 2015-05-12 | 2019-09-25 | 株式会社タダノ | 作業機械の前後進誤作動報知装置 |
| JP6428553B2 (ja) * | 2015-10-02 | 2018-11-28 | 株式会社デンソー | 車両の制御装置 |
| KR101684181B1 (ko) * | 2015-10-13 | 2016-12-08 | 현대자동차주식회사 | 차량의 페일세이프 주행 제어방법 |
| JP6296066B2 (ja) * | 2016-01-08 | 2018-03-20 | マツダ株式会社 | 自動変速機のレンジ判定装置 |
| JP6520858B2 (ja) * | 2016-08-08 | 2019-05-29 | トヨタ自動車株式会社 | 車両走行制御装置 |
| KR101918355B1 (ko) * | 2016-10-21 | 2018-11-13 | 현대자동차주식회사 | 하이브리드 차량의 기어 체결방법 |
| CN108128156A (zh) * | 2016-12-01 | 2018-06-08 | 上海汽车集团股份有限公司 | 一种换挡杆位置的失效检测处理方法、装置及系统 |
| JP6852658B2 (ja) * | 2017-11-24 | 2021-03-31 | 株式会社デンソー | 車両用制御装置 |
| JP7163580B2 (ja) * | 2018-01-15 | 2022-11-01 | トヨタ自動車株式会社 | 車両の制御装置 |
| DE102018204900B4 (de) * | 2018-03-29 | 2021-02-25 | Volkswagen Aktiengesellschaft | Bremssystem für ein Fahrzeug mit einer zumindest teilautomatisierten Steuerungsfunktion |
| JP7200736B2 (ja) * | 2019-02-20 | 2023-01-10 | トヨタ自動車株式会社 | 駆動力制御装置 |
| CN111516897B (zh) * | 2020-04-29 | 2022-05-10 | 湖南双达机电有限责任公司 | 除冰车的行驶控制方法、控制系统以及除冰车 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004052819A (ja) * | 2002-07-16 | 2004-02-19 | Aisin Aw Co Ltd | 車輌のレンジ切替え装置 |
| JP2006336717A (ja) * | 2005-05-31 | 2006-12-14 | Denso Corp | 車両制御システム |
Family Cites Families (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2914068B2 (ja) | 1993-01-18 | 1999-06-28 | トヨタ自動車株式会社 | 自動変速機を備えた車両のエンジン制御装置 |
| JP4326605B2 (ja) | 1997-11-06 | 2009-09-09 | 富士重工業株式会社 | 車両制御装置 |
| DE19950663A1 (de) * | 1999-10-21 | 2001-04-26 | Zahnradfabrik Friedrichshafen | Verfahren zur Steuerung eines Automatikgetriebes für ein Kraftfahrzeug in einem Notfahrbetrieb |
| JP2004025819A (ja) * | 2002-06-24 | 2004-01-29 | Daisan Kanagata Seisakusho:Kk | 射出成形金型及びプラスチックフィルター |
| JP3835406B2 (ja) * | 2002-12-10 | 2006-10-18 | トヨタ自動車株式会社 | 自動変速機の制御装置 |
| US7313980B2 (en) * | 2004-10-15 | 2008-01-01 | Calsonic Kansei Corporation | Operating position select device for automatic transmission |
| DE102005012261A1 (de) * | 2005-03-17 | 2006-09-28 | Zf Friedrichshafen Ag | Verfahren und Vorrichtung zur Steuerung eines Kraftfahrzeug-Antriebsstranges |
| JP4624857B2 (ja) | 2005-05-31 | 2011-02-02 | 株式会社デンソー | 車両制御システム |
| JP2007009946A (ja) * | 2005-06-28 | 2007-01-18 | Denso Corp | 車両制御システム |
| JP4932362B2 (ja) * | 2006-07-19 | 2012-05-16 | 日立オートモティブシステムズ株式会社 | 自動車の制御装置,制御方法及び変速システム |
-
2008
- 2008-07-15 JP JP2008184310A patent/JP5131066B2/ja not_active Expired - Fee Related
-
2009
- 2009-07-10 CN CN200980127455.7A patent/CN102089197B/zh not_active Expired - Fee Related
- 2009-07-10 US US13/054,436 patent/US8577567B2/en not_active Expired - Fee Related
- 2009-07-10 EP EP09797882.9A patent/EP2311706B1/en not_active Not-in-force
- 2009-07-10 KR KR1020117003342A patent/KR101265839B1/ko not_active Expired - Fee Related
- 2009-07-10 WO PCT/JP2009/062638 patent/WO2010007957A1/ja not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004052819A (ja) * | 2002-07-16 | 2004-02-19 | Aisin Aw Co Ltd | 車輌のレンジ切替え装置 |
| JP2006336717A (ja) * | 2005-05-31 | 2006-12-14 | Denso Corp | 車両制御システム |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018075904A (ja) * | 2016-11-08 | 2018-05-17 | トヨタ自動車株式会社 | 車両制御装置 |
| US10464554B2 (en) | 2016-11-08 | 2019-11-05 | Toyota Jidosha Kabushiki Kaisha | Vehicle controller |
| CN115056768A (zh) * | 2022-04-26 | 2022-09-16 | 一汽奔腾轿车有限公司 | 一种防前碰撞预警误报的控制方法、系统、设备及存储介质 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102089197A (zh) | 2011-06-08 |
| CN102089197B (zh) | 2014-02-26 |
| US20110112736A1 (en) | 2011-05-12 |
| WO2010007957A1 (ja) | 2010-01-21 |
| KR20110036838A (ko) | 2011-04-11 |
| EP2311706A4 (en) | 2013-08-21 |
| EP2311706B1 (en) | 2018-04-25 |
| US8577567B2 (en) | 2013-11-05 |
| JP5131066B2 (ja) | 2013-01-30 |
| KR101265839B1 (ko) | 2013-05-20 |
| EP2311706A1 (en) | 2011-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5131066B2 (ja) | 車両の制御装置 | |
| JP4506655B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP4805127B2 (ja) | 自動変速機の油圧制御装置、及びそれを備えたハイブリッド駆動装置 | |
| JP4353148B2 (ja) | 自動変速機の制御装置 | |
| JP4490172B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP4158792B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP3849609B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP4715932B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP4779938B2 (ja) | 車両用油圧制御装置 | |
| JP2009293498A (ja) | 車両のシフトバイワイヤ制御装置 | |
| JP2009068655A (ja) | シフト装置 | |
| JP4577138B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP5131233B2 (ja) | 車両用動力伝達装置の制御装置 | |
| JP2009041622A (ja) | シフト制御装置 | |
| JP4830622B2 (ja) | 車両の制御装置 | |
| JP4735215B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP2008039114A (ja) | 車両用自動変速機の制御装置 | |
| JP2009281578A (ja) | 車両の走行制御装置 | |
| JP2005024060A (ja) | 車両用自動変速機の油圧制御装置 | |
| JP4613683B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP2009162334A (ja) | 車両用自動変速機の制御装置 | |
| JP2007107598A (ja) | 車両用自動変速機の油圧制御装置 | |
| JP4983230B2 (ja) | 車両用自動変速機の油圧制御装置 | |
| JP2009097581A (ja) | シフト装置 | |
| JP2008151190A (ja) | 車両用自動変速機の制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111206 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120522 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120614 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121009 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121022 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151116 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5131066 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151116 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |