JP2008058445A - レンズ駆動装置、像振れ補正装置および撮像装置 - Google Patents
レンズ駆動装置、像振れ補正装置および撮像装置 Download PDFInfo
- Publication number
- JP2008058445A JP2008058445A JP2006233122A JP2006233122A JP2008058445A JP 2008058445 A JP2008058445 A JP 2008058445A JP 2006233122 A JP2006233122 A JP 2006233122A JP 2006233122 A JP2006233122 A JP 2006233122A JP 2008058445 A JP2008058445 A JP 2008058445A
- Authority
- JP
- Japan
- Prior art keywords
- lens
- driving device
- movable
- frequency
- optical axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
































Classifications
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B27/00—Optical systems or apparatus not provided for by any of the groups G02B1/00 - G02B26/00, G02B30/00
- G02B27/64—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image
- G02B27/646—Imaging systems using optical elements for stabilisation of the lateral and angular position of the image compensating for small deviations, e.g. due to vibration or shake
Landscapes
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Studio Devices (AREA)
- Adjustment Of Camera Lenses (AREA)
Abstract
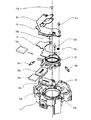
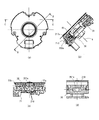
【解決手段】像振れ補正用の補正レンズを保持する保持部材36と、保持部材を光軸に直交する平面内で移動可能に支持する固定部材31と、保持部材の前記固定部材に対する相対的な位置を変化させる駆動手段と、保持部材と固定部材の間に配設され、0.3Hzから100Hzの帯域に転移領域を有する減衰剤45とを有する。
【選択図】図6
Description
1)摩擦が小さく目標への追従が良いこと
2)周波数特性を設計者が設計しやすいこと
などが挙げられる。これらを実現する機構が既に種々提案されている。
本発明の目的は、簡易な構造で、適切な粘性減衰をもって固定部材に対する保持部材の相対位置を変化させることのできるレンズ駆動装置、像振れ補正装置および撮像装置を提供しようとするものである。
a<b …(1)
を満たすように設けることが望ましい。永久変形を残さないためにはさらに
a<0.5b …(2)
の範囲であればより好適である。
G4=G1+0.9(G2−G1) …(4)
つまり、G3およびG4は、複素弾性率が実質的に変化する変化の幅の端から、それぞれ10%変化した点を表す。このG3およびG4の間にある領域を、本実施例においては転移領域(51b)とする。
このとき、図4で説明した様に、小さい摩擦しか受けない構成となっているため、一般的に粘性抵抗は小さく、cの値は小さな値になる。その結果、共振が強く見られる機構になる。つまり、小さな振幅の入力に対して適切に応答できるものの、外乱などの影響を受けやすい機構といえる。ここで、減衰比ζを次の式で定義する。
減衰比ζを用いてバネ質点系の共振峰の状態や過渡応答を把握することができる。共振周波数付近で減衰比ζが0.3程度となると制御性が良いが、一般的に用いられるコイルバネのみによる、減衰手段を介在させない機構では減衰比ζは0.1程度しか得られない。そのため、減衰手段を介在させない機構では共振の影響を受けやすく、制御性が必ずしも良くない。
F=m(d2x/dt2)+(c1+c2)(dx/dt)+(k1+k2)x
…(7)
の式で表される。
図9に示される条件で、減衰手段45を介在させたときと、介在させないときの計算結果による周波数応答線図を図10に示した。
b>c …(9)
を満たすように設けることが望ましい。なお、bは図6に示される間隔である。永久変形を残さないためにはさらに
0.5b>c …(10)
の範囲であればより好適である。
1)小さな摩擦の機構に適切な減衰を付加できる
2)組み付けが容易であり、低コストである
3)オープン駆動でも適切な制御性能を得ることができる
という効果を持たせたレンズ駆動装置3を得ることができる。
Gopen(s)=GdG1(s)G2(s) …(11)
で表される。
Gclose(s)=(GdGsG1(s)G2(s))
/(1+GdGsG1(s)G2(s)) …(12)
と表される。このときの周波数応答線図を、図24から図27に示した。
…(13)
この周波数応答線図を図28に示した。図28から明らかなように、減衰手段104がある方が外乱に対する実際のレンズ位置のゲインが小さく、影響を受けにくいことが分かる。
1)小さな摩擦の機構に適切な減衰を付加できる
2)組みつけが容易であり低コストである
3)フィードバック駆動でも安定した制御性および位相遅れを抑制することができる
という効果を持たせたレンズ駆動装置3を得ることができる。
1)適切な減衰を付加できる
2)不要なヨーイングやピッチング動作を抑制できる
3)フィードバック駆動でも安定した制御性および位相遅れを抑制することができる
という効果を持たせたレンズ駆動装置3を得ることができる。
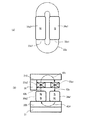
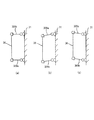
例えば、可動範囲を±0.3mmとして、ワイヤの長さを10mm程度に設定すると、光軸方向の変動は5μm以下となり、許容できる範囲である。つまり、ほぼ光軸に垂直な平面内を傾き無く案内できる。
1)適切な減衰を付加できる
2)不要なヨーイングやピッチング動作を抑制できる
3)オープン駆動でも適切な制御性能を得ることができる
という効果を持たせたレンズ駆動装置3を得ることができる。
2 撮像レンズ
3 レンズ駆動装置
6 撮像素子
8 振れセンサ
12 補正レンズ
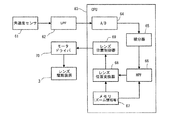
21 画像処理回路
25 カメラシステム制御回路
30 レンズシステム制御回路
31 ベース板
32a,32b,32c 球
33a,33b コイル
34a,34b 磁石
35a,35b,35c 弾性体
36 可動鏡筒
37 磁石吸着板
44a,44b 減衰手段取り付け部
45 減衰手段
61 角速度センサ
68 レンズ位置変換器
69 レンズ位置制御器
70 モータドライバ
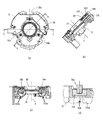
101 磁石吸着板
102 センサ
103 減衰手段取り付け部
104 減衰手段
111 レンズ位置センサ
209 LED
210 対向ヨーク
215 フォトインタラプタ
217 PSD
218 減衰手段取り付け部
219 減衰手段
301 弾性ワイヤ
302 固定ヨーク
310 減衰手段取り付け部
311 減衰手段
Claims (6)
- 像振れ補正用の補正レンズを保持する保持部材と、
前記保持部材を光軸に直交する平面内で移動可能に支持する固定部材と、
前記保持部材の前記固定部材に対する相対的な位置を変化させる駆動手段と、
前記保持部材と前記固定部材の間に配設され、0.3Hzから100Hzの帯域に転移領域を有する減衰剤とを有することを特徴とするレンズ駆動装置。 - 前記減衰剤は、ゲル剤であることを特徴とする請求項1に記載のレンズ駆動装置。
- 前記ゲル剤は紫外線硬化シリコーンゲルであり、硬化状態において前記帯域に転移領域を有することを特徴とする請求項2に記載のレンズ駆動装置。
- 前記減衰剤は、前記保持部材又は前記固定部材の一方に設けられた前記光軸に並行な軸部材と、他方に設けられた穴部との間隙に配設されることを特徴とする請求項1に記載のレンズ駆動装置。
- 請求項1ないし4のいずれかに記載のレンズ駆動装置を具備することを特徴とする像振れ補正装置。
- 請求項5に記載の像振れ補正装置を具備することを特徴とする撮像装置。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006233122A JP2008058445A (ja) | 2006-08-30 | 2006-08-30 | レンズ駆動装置、像振れ補正装置および撮像装置 |
| US11/841,365 US7742075B2 (en) | 2006-08-30 | 2007-08-20 | Lens driving device, image stabilizing unit, and image pickup apparatus |
| US12/775,371 US8319844B2 (en) | 2006-08-30 | 2010-05-06 | Lens driving device, image stabilizing unit, and image pickup apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006233122A JP2008058445A (ja) | 2006-08-30 | 2006-08-30 | レンズ駆動装置、像振れ補正装置および撮像装置 |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012043218A Division JP5414821B2 (ja) | 2012-02-29 | 2012-02-29 | 像ぶれ補正装置およびそれを備えた光学機器、撮像装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008058445A true JP2008058445A (ja) | 2008-03-13 |
| JP2008058445A5 JP2008058445A5 (ja) | 2009-10-08 |
Family
ID=39150916
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006233122A Pending JP2008058445A (ja) | 2006-08-30 | 2006-08-30 | レンズ駆動装置、像振れ補正装置および撮像装置 |
Country Status (2)
| Country | Link |
|---|---|
| US (2) | US7742075B2 (ja) |
| JP (1) | JP2008058445A (ja) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010072561A (ja) * | 2008-09-22 | 2010-04-02 | Canon Inc | 撮像装置 |
| JP2010204157A (ja) * | 2009-02-27 | 2010-09-16 | Nikon Corp | 振れ補正装置および光学機器 |
| JP2013050499A (ja) * | 2011-08-30 | 2013-03-14 | Sigma Corp | 光学式像振れ補正機構 |
| JP2014074828A (ja) * | 2012-10-05 | 2014-04-24 | Canon Inc | 像振れ補正装置、それを用いた光学機器 |
| JP2015099402A (ja) * | 2009-08-21 | 2015-05-28 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール及びカメラ |
| JP2015125397A (ja) * | 2013-12-27 | 2015-07-06 | 日本電産コパル株式会社 | レンズ駆動装置 |
| US9277131B2 (en) | 2012-03-08 | 2016-03-01 | Canon Kabushiki Kaisha | Image stabilization apparatus, optical apparatus, and image capturing apparatus |
| JP2016035598A (ja) * | 2015-12-01 | 2016-03-17 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュールおよびカメラ |
| JP2016212270A (ja) * | 2015-05-08 | 2016-12-15 | Tdk株式会社 | レンズ駆動装置 |
| JP2017138625A (ja) * | 2017-05-08 | 2017-08-10 | キヤノン株式会社 | 像振れ補正装置、それを用いた光学機器 |
| US10444532B2 (en) | 2015-04-23 | 2019-10-15 | Tdk Corporation | Lens driving device |
Families Citing this family (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4924351B2 (ja) * | 2007-10-09 | 2012-04-25 | 船井電機株式会社 | 撮像装置 |
| JP5242151B2 (ja) * | 2007-12-21 | 2013-07-24 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | 振動補正制御回路及びそれを備えた撮像装置 |
| JP5237622B2 (ja) * | 2007-12-21 | 2013-07-17 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | 振動補正制御回路及びそれを備えた撮像装置 |
| JP2009156945A (ja) * | 2007-12-25 | 2009-07-16 | Sanyo Electric Co Ltd | 撮像装置の防振制御回路 |
| JP5298269B2 (ja) * | 2007-12-25 | 2013-09-25 | セミコンダクター・コンポーネンツ・インダストリーズ・リミテッド・ライアビリティ・カンパニー | 振動補償制御回路 |
| US20090201380A1 (en) * | 2008-02-12 | 2009-08-13 | Decisive Analytics Corporation | Method and apparatus for streamlined wireless data transfer |
| JP5517431B2 (ja) * | 2008-09-29 | 2014-06-11 | キヤノン株式会社 | 光学装置および撮像装置 |
| KR101575631B1 (ko) | 2009-03-17 | 2015-12-08 | 삼성전자주식회사 | 손떨림 보정장치 |
| TWI417567B (zh) * | 2009-08-26 | 2013-12-01 | Largan Precision Co Ltd | 攝影模組 |
| JP2011145526A (ja) * | 2010-01-15 | 2011-07-28 | Tamron Co Ltd | 防振アクチュエータ、及びそれを備えたレンズユニット、カメラ |
| JP5609358B2 (ja) * | 2010-07-20 | 2014-10-22 | ソニー株式会社 | 撮像装置、制御装置及び撮像装置の制御方法 |
| JP5693163B2 (ja) * | 2010-11-11 | 2015-04-01 | キヤノン株式会社 | 振れ補正装置、レンズ鏡筒、及び光学機器 |
| TWI444753B (zh) * | 2010-11-16 | 2014-07-11 | Altek Corp | 影像擷取裝置及其曝光時間調整方法 |
| JP5624529B2 (ja) * | 2011-09-27 | 2014-11-12 | 株式会社東芝 | 手振れ補正装置及び撮像装置 |
| US9294661B2 (en) | 2011-11-18 | 2016-03-22 | Lg Innotek Co., Ltd. | Camera module |
| JP2013114167A (ja) * | 2011-11-30 | 2013-06-10 | Jvc Kenwood Corp | 撮像装置 |
| KR101300341B1 (ko) * | 2011-12-05 | 2013-08-28 | 삼성전기주식회사 | 카메라 모듈 |
| KR20140035672A (ko) | 2012-09-14 | 2014-03-24 | 삼성전자주식회사 | 손떨림 보정장치 및 이를 포함하는 디지털 촬영장치 |
| US9715612B2 (en) | 2012-12-26 | 2017-07-25 | Cognex Corporation | Constant magnification lens for vision system camera |
| DE102013200316A1 (de) * | 2013-01-11 | 2014-07-17 | Carl Zeiss Sports Optics Gmbh | Optisches System zur Abbildung eines Objekts |
| US11002854B2 (en) | 2013-03-13 | 2021-05-11 | Cognex Corporation | Lens assembly with integrated feedback loop and time-of-flight sensor |
| US10712529B2 (en) | 2013-03-13 | 2020-07-14 | Cognex Corporation | Lens assembly with integrated feedback loop for focus adjustment |
| US10830927B2 (en) | 2014-05-06 | 2020-11-10 | Cognex Corporation | System and method for reduction of drift in a vision system variable lens |
| US10795060B2 (en) | 2014-05-06 | 2020-10-06 | Cognex Corporation | System and method for reduction of drift in a vision system variable lens |
| US9560247B2 (en) * | 2014-05-30 | 2017-01-31 | Apple Inc. | Optical image stabilization compensations |
| JP6590541B2 (ja) * | 2015-06-11 | 2019-10-16 | オリンパス株式会社 | ぶれ補正装置 |
| CN113341526B (zh) * | 2016-01-11 | 2024-04-09 | Lg伊诺特有限公司 | 透镜驱动装置、相机模块以及光学装置 |
| JP2019008178A (ja) * | 2017-06-26 | 2019-01-17 | キヤノン株式会社 | 撮像装置およびその制御方法 |
| US11474416B2 (en) * | 2018-07-25 | 2022-10-18 | Tdk Taiwan Corp. | Optical member driving mechanism |
| CN110971789B (zh) * | 2018-09-28 | 2021-04-02 | 杭州海康威视数字技术股份有限公司 | 一种摄像机 |
| JP7218135B2 (ja) * | 2018-09-28 | 2023-02-06 | キヤノン株式会社 | 画像読取装置 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0281009A (ja) * | 1988-09-19 | 1990-03-22 | Canon Inc | 光学素子保持枠の支持構造 |
| JPH08184870A (ja) * | 1994-12-28 | 1996-07-16 | Canon Inc | 振れ補正装置 |
| JPH11211956A (ja) * | 1998-01-27 | 1999-08-06 | Olympus Optical Co Ltd | 光学素子または光学要素の支持装置 |
| JP2002139759A (ja) * | 2000-10-31 | 2002-05-17 | Canon Inc | 振れ補正装置および光学機器 |
| JP2005338298A (ja) * | 2004-05-25 | 2005-12-08 | Sumida Corporation | 振れ補正光学装置 |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS60143330A (ja) | 1983-12-29 | 1985-07-29 | Matsushita Electric Ind Co Ltd | 撮影装置 |
| JPH02232824A (ja) | 1989-03-07 | 1990-09-14 | Matsushita Electric Ind Co Ltd | 対物レンズ駆動装置 |
| US5579176A (en) * | 1993-04-30 | 1996-11-26 | Olympus Optical Co., Ltd. | Optical system supporting device with flowable damping material |
| JP2941647B2 (ja) * | 1994-05-10 | 1999-08-25 | 富士写真光機株式会社 | 像安定光学装置 |
| KR970011821B1 (ko) * | 1994-11-17 | 1997-07-16 | 대우전자 주식회사 | 광디스크플레이어의 광픽업액츄에이터 |
| JPH08273177A (ja) * | 1995-03-31 | 1996-10-18 | Olympus Optical Co Ltd | 光学系駆動装置 |
| US20040201707A1 (en) * | 1998-03-12 | 2004-10-14 | Kazuhiro Noguchi | Variable magnification lens having image stabilizing function |
| JP3969927B2 (ja) | 2000-04-06 | 2007-09-05 | キヤノン株式会社 | レンズ鏡筒、撮影装置及び観察装置 |
| US7710460B2 (en) * | 2004-07-21 | 2010-05-04 | Hewlett-Packard Development Company, L.P. | Method of compensating for an effect of temperature on a control system |
| US7734083B2 (en) * | 2005-07-08 | 2010-06-08 | Konica Minolta Opto, Inc. | Printed board, image pickup apparatus and camera |
| US7796878B2 (en) * | 2005-07-15 | 2010-09-14 | Panasonic Corporation | Lens barrel and imaging device including lens barrel |
| JP4958635B2 (ja) * | 2007-05-21 | 2012-06-20 | キヤノン株式会社 | 撮像装置及びその制御方法 |
-
2006
- 2006-08-30 JP JP2006233122A patent/JP2008058445A/ja active Pending
-
2007
- 2007-08-20 US US11/841,365 patent/US7742075B2/en not_active Expired - Fee Related
-
2010
- 2010-05-06 US US12/775,371 patent/US8319844B2/en active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0281009A (ja) * | 1988-09-19 | 1990-03-22 | Canon Inc | 光学素子保持枠の支持構造 |
| JPH08184870A (ja) * | 1994-12-28 | 1996-07-16 | Canon Inc | 振れ補正装置 |
| JPH11211956A (ja) * | 1998-01-27 | 1999-08-06 | Olympus Optical Co Ltd | 光学素子または光学要素の支持装置 |
| JP2002139759A (ja) * | 2000-10-31 | 2002-05-17 | Canon Inc | 振れ補正装置および光学機器 |
| JP2005338298A (ja) * | 2004-05-25 | 2005-12-08 | Sumida Corporation | 振れ補正光学装置 |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010072561A (ja) * | 2008-09-22 | 2010-04-02 | Canon Inc | 撮像装置 |
| JP2010204157A (ja) * | 2009-02-27 | 2010-09-16 | Nikon Corp | 振れ補正装置および光学機器 |
| JP2015099402A (ja) * | 2009-08-21 | 2015-05-28 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール及びカメラ |
| JP2015129960A (ja) * | 2009-08-21 | 2015-07-16 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュール及びカメラ |
| JP2013050499A (ja) * | 2011-08-30 | 2013-03-14 | Sigma Corp | 光学式像振れ補正機構 |
| US9277131B2 (en) | 2012-03-08 | 2016-03-01 | Canon Kabushiki Kaisha | Image stabilization apparatus, optical apparatus, and image capturing apparatus |
| JP2014074828A (ja) * | 2012-10-05 | 2014-04-24 | Canon Inc | 像振れ補正装置、それを用いた光学機器 |
| JP2015125397A (ja) * | 2013-12-27 | 2015-07-06 | 日本電産コパル株式会社 | レンズ駆動装置 |
| US10444532B2 (en) | 2015-04-23 | 2019-10-15 | Tdk Corporation | Lens driving device |
| JP2016212270A (ja) * | 2015-05-08 | 2016-12-15 | Tdk株式会社 | レンズ駆動装置 |
| JP2016035598A (ja) * | 2015-12-01 | 2016-03-17 | ミツミ電機株式会社 | レンズ駆動装置、カメラモジュールおよびカメラ |
| JP2017138625A (ja) * | 2017-05-08 | 2017-08-10 | キヤノン株式会社 | 像振れ補正装置、それを用いた光学機器 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7742075B2 (en) | 2010-06-22 |
| US20100214426A1 (en) | 2010-08-26 |
| US20080055421A1 (en) | 2008-03-06 |
| US8319844B2 (en) | 2012-11-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008058445A (ja) | レンズ駆動装置、像振れ補正装置および撮像装置 | |
| JP5132295B2 (ja) | 撮像装置および光学機器 | |
| KR102163416B1 (ko) | 조리개 모듈 및 이를 포함하는 카메라 모듈 | |
| US7710460B2 (en) | Method of compensating for an effect of temperature on a control system | |
| US20060017815A1 (en) | Flexible suspension for image stabilization | |
| EP1933198B1 (en) | Optical apparatus | |
| JP2006031027A (ja) | 画像安定化のためのマグネット構造 | |
| JP5693163B2 (ja) | 振れ補正装置、レンズ鏡筒、及び光学機器 | |
| JP2007286318A (ja) | 手振れ補正装置、レンズユニットおよび撮像装置 | |
| US11165325B2 (en) | Drive apparatus having drive unit using magnetic circuit | |
| JP2010266789A (ja) | 像振れ補正装置および撮像装置 | |
| JP2010286810A (ja) | ブレ補正装置および光学機器 | |
| JP5183098B2 (ja) | 像ぶれ補正装置およびそれを有する光学機器、撮像装置 | |
| TW201224626A (en) | Camera module | |
| JP2014074828A (ja) | 像振れ補正装置、それを用いた光学機器 | |
| JP5483988B2 (ja) | 像振れ補正装置 | |
| JP2008281949A (ja) | 振れ補正装置および撮像装置 | |
| JP5414821B2 (ja) | 像ぶれ補正装置およびそれを備えた光学機器、撮像装置 | |
| JP2008286929A (ja) | 振れ補正装置および撮像装置 | |
| JP5425335B2 (ja) | 像振れ補正装置およびそれを具備する撮像装置 | |
| KR20210041947A (ko) | 카메라 액추에이터 및 이를 포함하는 카메라 장치 | |
| US20060018644A1 (en) | Apparatus and method for heat sinking a sensor | |
| JP2008158233A (ja) | ブレ補正装置、及び光学装置 | |
| JP2006047054A (ja) | 位置検出装置、手ぶれ補正装置および撮像装置 | |
| JP2008292902A (ja) | 像振れ補正装置および撮像装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090826 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090826 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100520 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20100630 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110628 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110705 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110901 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20111129 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20120229 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20120308 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20120420 |