JP2007143316A - モータ制御装置 - Google Patents
モータ制御装置 Download PDFInfo
- Publication number
- JP2007143316A JP2007143316A JP2005334855A JP2005334855A JP2007143316A JP 2007143316 A JP2007143316 A JP 2007143316A JP 2005334855 A JP2005334855 A JP 2005334855A JP 2005334855 A JP2005334855 A JP 2005334855A JP 2007143316 A JP2007143316 A JP 2007143316A
- Authority
- JP
- Japan
- Prior art keywords
- motor
- voltage
- voltage command
- command value
- pwm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000008859 change Effects 0.000 abstract description 3
- 230000003247 decreasing effect Effects 0.000 abstract 2
- 238000000034 method Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 8
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 6
- 230000008569 process Effects 0.000 description 6
- 230000007704 transition Effects 0.000 description 5
- 230000015556 catabolic process Effects 0.000 description 2
- 238000007796 conventional method Methods 0.000 description 2
- 238000006731 degradation reaction Methods 0.000 description 2
- 229920006395 saturated elastomer Polymers 0.000 description 2
- 230000035939 shock Effects 0.000 description 2
- 230000001629 suppression Effects 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000007562 laser obscuration time method Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000005406 washing Methods 0.000 description 1
Images












Landscapes
- Control Of Ac Motors In General (AREA)
- Inverter Devices (AREA)
Abstract
【解決手段】モータに印可する電圧指令値とモータに印加するPWM電圧とに位相誤差が生じない変調率の値である上限変調率(kmax)を上限として、第1のモータ電圧指令値の変調率を補正して第2のモータ電圧指令値を生成することにより、キャリア信号を変更しない非同期PWMで過変調時に発生する位相誤差を減少させ、PWM出力電圧の低周波歪み成分を減少させることができる。
【選択図】図1
Description
図1はこの発明の実施の形態1におけるモータ制御装置の構成を示すものである。図1において、1は制御演算手段、2はPWMインバータ、3はモータ、4は電圧指令演算手段、5は基本波電圧線形化手段、6はキャリア信号生成手段、7はPWM波形生成手段、8は補償倍率リミッタ手段である。制御演算手段1はPWM信号Su,Sv,Swを介してPWMインバータ2と接続され、またPWMインバータ2の出力はU,V,W相の結線にてモータ3に接続されている。モータ3はU,V,W相に供給される交流電圧によりトルクを発生し運転する。
このような補正を行う変調率を求めるには図5の逆関数である図6に示すような関係にすれば良い。すなわち、電圧指令値に対するキャリア信号の振幅の割合を示す基本変調率(k0)が1よりも大きい場合には、予め保持しておいた図6に示すようなテーブルを参照して電圧指令値を補正する第1の変調率(k1)を決定する。
これにより、基本変調率(k0)が1以下の場合のみならず、基本変調率(k0)が1以上となる場合であっても電圧指令値と同一な基本波成分の出力電圧を得ることができる。
より具体的な数値にて例示すると、例えば図6において、電圧指令値を約1.10倍即ち基本変調率(k0)が約1.10の時、電圧指令値を補正する第1の変調率を5とすることで、図5に示されたように基本波成分は約1.10倍になり、電圧指令値と出力電圧の基本波成分が線形化される。
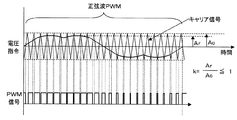
近年、マイコン等の性能向上に伴い、上記の実現手段としてはデジタル方式が広く用いられている。デジタル方式は所定周期毎に離散的に電圧指令値を演算してこの値を保持し、三角波状のキャリア信号と、前記記憶されている電圧指令値の大小を比較し、この比較結果をPWM信号として出力する方式である。
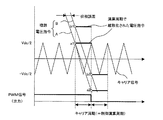
図7はマイコンでの電圧指令演算結果を示す。図7は電圧指令の演算周期とキャリア周期は同一である例であり、キャリアの山に同期して電圧指令が更新される。過変調PWMの場合、キャリア信号の振幅よりも電圧指令の振幅が大きいため、PWMのスイッチングが発生しない区間が現れ、この区間は変調率が大きいほど増加する。このような過変調PWM時の離散的演算により発生する位相誤差について図8により説明する。
電圧指令値がキャリア信号の振幅範囲内であれば、同一周期内でPWMのスイッチング(1周期内でのON−OFF動作)が発生するが、図8の電圧指令Aの様に離散化された電圧指令がキャリア振幅の範囲内を通過してしまうと、PWMのスイッチングはキャリア周期内で発生せず、結果、キャリア信号の所定タイミングで単一のスイッチングが発生することとなる。
図9のような、変調率Vk=1.155≒2/sqrt(3)とその倍の変調率Vk=2.309≒2・2/sqrt(3)の時の電圧指令波形を考えた場合、電圧指令値がVdc/2又は−Vdc/2を越えたところが100%デューティとなる、即ち、電圧指令値がVdc/2又は−Vdc/2の値に飽和した状態(以下、張付きという。)となり、正負いずれかの極性に張り付く。この張付き状態から他の極性の張付き状態に移行する部分、つまり、図9のステージ1とステージ4の部分にPWMのスイッチングが発生する。張付きが移行する位相角を張付き移行位相角θcng[rad]とすると、変調率kと張付き移行位相角θcngとに次式の関係がある。

図11は高速回転時の電圧指令およびPWM出力電圧波形を示す図である(キャリア信号の図示省略)。
非同期PWMでは電圧指令の演算周期は電圧指令の周波数と無関係であり、デジタル方式においては通常一定周期で離散的に演算される。このため、高速回転時ではたとえば図11(a)の丸印の如く、電圧指令の周期に対して演算周期が粗い結果となる。ここで変調率を無限大として考えた場合、PWM出力電圧の波形は図11(b)となる。すなわち電圧指令の演算周期と電圧指令の電圧極性にのみ依存するPWM波形となる。図11(b)はPWM出力電圧波形のパルス幅において電圧指令の演算周期の影響を受けて低周波の電圧誤差を生じ、図11(c)の如く歪み成分を伴う。このためモータには出力電圧周波数よりも低い周波数成分の電圧が印加される。これによりトルクあるいは電流が変動し運転特性に劣化が生じる。
PWMインバータ2は、前記PWM信号により生成したPWM出力電圧をモータ3に供給し、モータ3はPWM出力電圧によりトルクを発生し運転する。
図13は過変調時における、電圧指令とPWM信号との位相誤差を示す図である。図13(a)は変調率の上限制限がない従来方式の電圧指令波形及びPWM信号波形、図13(b)は本発明の電圧指令波形及びPWM信号波形である。
基本波電圧線形化手段5により、前記基本変調率(k0)の大きさが1を越える場合、前記上限変調率(kmax)を上限とする第1の変調率(k1)の値に基づき、前記第1のモータ電圧指令値Vu1* ,Vv1* ,Vw1* を補正して第2のモータ電圧指令値Vu2* ,Vv2* ,Vw2* を生成することにより、第1のモータ電圧指令値に対するPWM出力電圧の基本波成分が線形化され、且つ、第1の変調率(k1)の上限値を上限変調率(kmax)により制限しているので、電圧指令値のゼロクロス近傍でPWMのスイッチングが発生し、位相誤差が縮小される。
Claims (3)
- PWM制御を行い直流電圧を交流電圧に変換することでモータに印加する電圧を制御するモータ制御装置において、
電圧指令値に基づいてモータに印加する正弦波状電圧の指令値である第1のモータ電圧指令値を演算して求める電圧指令値演算手段と、
前記直流電圧で出力可能な正弦波状電圧の大きさに対する前記第1のモータ電圧指令値の大きさの割合を示す基本変調率(k0)を求め、該基本変調率(k0)に基づいて第1のモータ電圧指令値の補正をして第2のモータ電圧指令値を求める基本波電圧線形化手段と、
前記第2のモータ電圧指令値及びPWM生成キャリア信号に基づいてPWM信号を生成するPWM波形生成手段と、
前記第1のモータ電圧指令値の大きさとモータに印可するPWM出力電圧の基本波成分の大きさとの関係を線形化したときに、前記モータに印可する電圧指令値とモータに印加するPWM出力電圧とに位相誤差が生じない変調率の上限値である上限変調率(kmax)を求める補償倍率リミッタ手段と、
前記PWM信号に基づいて前記直流電圧を交流電圧に変換したPWM出力電圧をモータに供給するPWMインバータとを備え、
前記基本波電圧線形化手段は、前記基本変調率(k0)の大きさが1を越える場合には、前記基本変調率(k0)に基づいて、前記第1のモータ電圧指令値の大きさとモータに印可するPWM出力電圧の基本波成分の大きさとの関係を線形化する第1の変調率(k1)を求め、前記上限変調率(kmax)を上限値として、前記第1の変調率(k1)に基づいて前記第1のモータ電圧指令値を補正して前記第2のモータ電圧指令値を求めることを特徴とするモータ制御装置。 - 前記基本波電圧線形化手段は、前記基本変調率(k0)の大きさが1以下の場合には、前記基本変調率(k0)に基づいて第1のモータ電圧指令値の補正をして第2のモータ電圧指令値を求めることを特徴とする請求項1記載のモータ制御装置。
- 前記補償倍率リミッタ手段は、前記モータに印可する電圧の周波数の指令値と、前記第1のモータ電圧指令値生成の演算周期とに基づいて、前記上限変調率(kmax)を求めることを特徴とする請求項1記載のモータ制御装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005334855A JP4417323B2 (ja) | 2005-11-18 | 2005-11-18 | モータ制御装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005334855A JP4417323B2 (ja) | 2005-11-18 | 2005-11-18 | モータ制御装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2007143316A true JP2007143316A (ja) | 2007-06-07 |
| JP4417323B2 JP4417323B2 (ja) | 2010-02-17 |
Family
ID=38205496
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005334855A Active JP4417323B2 (ja) | 2005-11-18 | 2005-11-18 | モータ制御装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4417323B2 (ja) |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008156194A1 (ja) * | 2007-06-18 | 2008-12-24 | Toyota Jidosha Kabushiki Kaisha | 交流電動機の駆動制御装置 |
| EP2164156A1 (en) * | 2008-09-11 | 2010-03-17 | Sanyo Electric Co., Ltd. | Inverter control apparatus and motor drive system |
| JP2010068662A (ja) * | 2008-09-11 | 2010-03-25 | Mitsubishi Electric Corp | 電動機の駆動装置並びに冷凍空調装置 |
| JP2010081746A (ja) * | 2008-09-26 | 2010-04-08 | Mitsubishi Electric Corp | 電動機の駆動装置並びに冷凍空調装置 |
| JP2010093931A (ja) * | 2008-10-07 | 2010-04-22 | Mitsubishi Heavy Ind Ltd | 永久磁石型同期モータの制御装置及び制御方法 |
| JP2010104151A (ja) * | 2008-10-23 | 2010-05-06 | Toyota Motor Corp | 交流電動機の制御装置および制御方法 |
| JP2011066949A (ja) * | 2009-09-15 | 2011-03-31 | Hitachi Appliances Inc | インバータ装置及び、それを用いた空調機,洗濯機,冷蔵庫 |
| EP2437392A1 (en) * | 2009-05-29 | 2012-04-04 | Toyota Jidosha Kabushiki Kaisha | Control device and control method for alternating current motor |
| JP2012105393A (ja) * | 2010-11-08 | 2012-05-31 | Mitsubishi Electric Corp | Pwmインバータ装置 |
| JP2014093820A (ja) * | 2012-11-01 | 2014-05-19 | Toyota Motor Corp | モータ制御装置、モータ制御方法及び制御プログラム |
| WO2015004994A1 (ja) | 2013-07-09 | 2015-01-15 | 日立オートモティブシステムズ株式会社 | インバータ装置および電動車両 |
| JP2017169295A (ja) * | 2016-03-15 | 2017-09-21 | 株式会社日立産機システム | モータの制御装置および駆動システム |
| EP3276820A4 (en) * | 2015-03-24 | 2018-12-05 | Hitachi Industrial Equipment Systems Co., Ltd. | Motor control device |
| JP2019213443A (ja) * | 2018-05-31 | 2019-12-12 | エルエス産電株式会社Lsis Co., Ltd. | インバータ制御装置 |
| CN111682783A (zh) * | 2020-06-01 | 2020-09-18 | 新风光电子科技股份有限公司 | 一种采用梯形调制波的高压变频一体机及其控制方法 |
| JP2020167868A (ja) * | 2019-03-29 | 2020-10-08 | 株式会社富士通ゼネラル | モータ制御装置 |
| JP2021097526A (ja) * | 2019-12-18 | 2021-06-24 | 三菱電機株式会社 | 交流回転電機の制御装置 |
| JP2022012762A (ja) * | 2020-07-02 | 2022-01-17 | 株式会社ミツバ | モータ制御装置、モータユニット、及びモータ制御方法 |
| WO2023233682A1 (ja) * | 2022-06-02 | 2023-12-07 | 三菱電機株式会社 | 交流回転電機の制御装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11682998B2 (en) * | 2020-08-27 | 2023-06-20 | Nissan Motor Co., Ltd. | Motor control method and motor control apparatus |
-
2005
- 2005-11-18 JP JP2005334855A patent/JP4417323B2/ja active Active
Cited By (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7911177B2 (en) | 2007-06-18 | 2011-03-22 | Toyota Jidosha Kabushiki Kaisha | AC motor drive controller |
| JP2008312420A (ja) * | 2007-06-18 | 2008-12-25 | Toyota Central R&D Labs Inc | 交流電動機の駆動制御装置 |
| WO2008156194A1 (ja) * | 2007-06-18 | 2008-12-24 | Toyota Jidosha Kabushiki Kaisha | 交流電動機の駆動制御装置 |
| EP2164156A1 (en) * | 2008-09-11 | 2010-03-17 | Sanyo Electric Co., Ltd. | Inverter control apparatus and motor drive system |
| JP2010068662A (ja) * | 2008-09-11 | 2010-03-25 | Mitsubishi Electric Corp | 電動機の駆動装置並びに冷凍空調装置 |
| US8115431B2 (en) | 2008-09-11 | 2012-02-14 | Sanyo Electric Co., Ltd. | Inverter control apparatus and motor drive system |
| JP2010081746A (ja) * | 2008-09-26 | 2010-04-08 | Mitsubishi Electric Corp | 電動機の駆動装置並びに冷凍空調装置 |
| JP2010093931A (ja) * | 2008-10-07 | 2010-04-22 | Mitsubishi Heavy Ind Ltd | 永久磁石型同期モータの制御装置及び制御方法 |
| US8502493B2 (en) | 2008-10-23 | 2013-08-06 | Toyota Jidosha Kabushiki Kaisha | Control device and control method for alternating-current motor |
| JP4506889B2 (ja) * | 2008-10-23 | 2010-07-21 | トヨタ自動車株式会社 | 交流電動機の制御装置および制御方法 |
| JP2010104151A (ja) * | 2008-10-23 | 2010-05-06 | Toyota Motor Corp | 交流電動機の制御装置および制御方法 |
| EP2437392A1 (en) * | 2009-05-29 | 2012-04-04 | Toyota Jidosha Kabushiki Kaisha | Control device and control method for alternating current motor |
| EP2437392A4 (en) * | 2009-05-29 | 2013-10-23 | Toyota Motor Co Ltd | CONTROL DEVICE AND CONTROL METHOD FOR A AC MOTOR |
| CN102025318A (zh) * | 2009-09-15 | 2011-04-20 | 株式会社日立制作所 | 逆变装置以及使用该逆变装置的空调、洗衣机、冰箱 |
| CN102025318B (zh) * | 2009-09-15 | 2014-06-18 | 株式会社日立制作所 | 逆变装置以及使用该逆变装置的空调、洗衣机、冰箱 |
| JP2011066949A (ja) * | 2009-09-15 | 2011-03-31 | Hitachi Appliances Inc | インバータ装置及び、それを用いた空調機,洗濯機,冷蔵庫 |
| JP2012105393A (ja) * | 2010-11-08 | 2012-05-31 | Mitsubishi Electric Corp | Pwmインバータ装置 |
| JP2014093820A (ja) * | 2012-11-01 | 2014-05-19 | Toyota Motor Corp | モータ制御装置、モータ制御方法及び制御プログラム |
| US9819299B2 (en) | 2013-07-09 | 2017-11-14 | Hitachi Automotive Systems, Ltd. | Inverter device and electric vehicle |
| WO2015004994A1 (ja) | 2013-07-09 | 2015-01-15 | 日立オートモティブシステムズ株式会社 | インバータ装置および電動車両 |
| EP3276820A4 (en) * | 2015-03-24 | 2018-12-05 | Hitachi Industrial Equipment Systems Co., Ltd. | Motor control device |
| JP2017169295A (ja) * | 2016-03-15 | 2017-09-21 | 株式会社日立産機システム | モータの制御装置および駆動システム |
| WO2017159072A1 (ja) * | 2016-03-15 | 2017-09-21 | 株式会社 日立産機システム | モータの制御装置および駆動システム |
| JP2019213443A (ja) * | 2018-05-31 | 2019-12-12 | エルエス産電株式会社Lsis Co., Ltd. | インバータ制御装置 |
| JP2020167868A (ja) * | 2019-03-29 | 2020-10-08 | 株式会社富士通ゼネラル | モータ制御装置 |
| JP7222290B2 (ja) | 2019-03-29 | 2023-02-15 | 株式会社富士通ゼネラル | モータ制御装置 |
| JP2021097526A (ja) * | 2019-12-18 | 2021-06-24 | 三菱電機株式会社 | 交流回転電機の制御装置 |
| CN111682783A (zh) * | 2020-06-01 | 2020-09-18 | 新风光电子科技股份有限公司 | 一种采用梯形调制波的高压变频一体机及其控制方法 |
| JP2022012762A (ja) * | 2020-07-02 | 2022-01-17 | 株式会社ミツバ | モータ制御装置、モータユニット、及びモータ制御方法 |
| JP7548734B2 (ja) | 2020-07-02 | 2024-09-10 | 株式会社ミツバ | モータ制御装置、モータユニット、及びモータ制御方法 |
| WO2023233682A1 (ja) * | 2022-06-02 | 2023-12-07 | 三菱電機株式会社 | 交流回転電機の制御装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4417323B2 (ja) | 2010-02-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4417323B2 (ja) | モータ制御装置 | |
| JP4905777B2 (ja) | 交流交流直接変換器の制御装置 | |
| JP5510842B2 (ja) | 3相モータ制御装置、3相モータシステム、3相モータ制御方法及びプログラム | |
| EP2036195A1 (en) | Ac motor drive control device and method | |
| JP3892804B2 (ja) | 電力変換装置とその制御方法 | |
| JP5813934B2 (ja) | 電力変換装置 | |
| JP5412820B2 (ja) | 交流電動機の制御装置及び制御方法 | |
| WO2019176109A1 (ja) | 電動機制御方法及び電動機制御装置 | |
| JP2008220106A (ja) | Pwm制御装置 | |
| US11374505B2 (en) | Inverter device for performing a power conversion operation to convert DC power to AC power | |
| JP4539192B2 (ja) | 交流電動機の制御装置 | |
| JP5428744B2 (ja) | 電力変換装置の制御方法 | |
| JP2005168140A (ja) | モータ制御装置及びその制御方法 | |
| JP5862690B2 (ja) | 電動機駆動装置の制御装置および電動機駆動システム | |
| JP4905174B2 (ja) | 交流交流直接変換器の制御装置 | |
| JP7523693B2 (ja) | 電力変換器の制御部および電力変換装置 | |
| JP2000175491A (ja) | Acモータ駆動装置 | |
| WO2024157363A1 (ja) | 電動機制御装置および電動機制御方法 | |
| JP2015126607A (ja) | モータ制御システム | |
| WO2018220968A1 (ja) | 交流電動機の制御装置 | |
| WO2023037589A1 (ja) | インバータ制御装置 | |
| JP2009213321A (ja) | Pwmインバータ装置とその制御方法 | |
| WO2023281794A1 (ja) | モータ制御装置、モータ制御方法、ステアリングシステム、および車両駆動システム | |
| JP2023146537A (ja) | 運転制御システム及び空気調和機、並びに運転制御方法、並びに運転制御プログラム | |
| JP2020191754A (ja) | モータ駆動制御装置及びその制御方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090406 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090414 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090508 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20091117 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20091125 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4417323 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121204 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20121204 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20131204 Year of fee payment: 4 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |