JP2006304559A - 変形構造体およびケーブルの支持装置 - Google Patents
変形構造体およびケーブルの支持装置 Download PDFInfo
- Publication number
- JP2006304559A JP2006304559A JP2005125723A JP2005125723A JP2006304559A JP 2006304559 A JP2006304559 A JP 2006304559A JP 2005125723 A JP2005125723 A JP 2005125723A JP 2005125723 A JP2005125723 A JP 2005125723A JP 2006304559 A JP2006304559 A JP 2006304559A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- deformable structure
- cable
- coupling
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 230000008878 coupling Effects 0.000 claims abstract description 159
- 238000010168 coupling process Methods 0.000 claims abstract description 159
- 238000005859 coupling reaction Methods 0.000 claims abstract description 159
- 238000006073 displacement reaction Methods 0.000 claims description 116
- 230000009466 transformation Effects 0.000 claims description 10
- 125000006850 spacer group Chemical group 0.000 abstract description 55
- 238000013459 approach Methods 0.000 abstract description 2
- 210000000707 wrist Anatomy 0.000 description 69
- 230000002093 peripheral effect Effects 0.000 description 29
- 238000003466 welding Methods 0.000 description 25
- 238000003780 insertion Methods 0.000 description 13
- 230000037431 insertion Effects 0.000 description 13
- 238000010586 diagram Methods 0.000 description 12
- 230000003511 endothelial effect Effects 0.000 description 8
- 230000000052 comparative effect Effects 0.000 description 6
- 239000012636 effector Substances 0.000 description 4
- 238000007654 immersion Methods 0.000 description 4
- 230000002452 interceptive effect Effects 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 239000000498 cooling water Substances 0.000 description 3
- 238000005520 cutting process Methods 0.000 description 3
- 239000012530 fluid Substances 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000007423 decrease Effects 0.000 description 2
- 238000012423 maintenance Methods 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 240000001973 Ficus microcarpa Species 0.000 description 1
- 238000005452 bending Methods 0.000 description 1
- 238000001816 cooling Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000009429 electrical wiring Methods 0.000 description 1
- 210000003038 endothelium Anatomy 0.000 description 1
- 238000005304 joining Methods 0.000 description 1
- 239000007788 liquid Substances 0.000 description 1
- 239000003973 paint Substances 0.000 description 1
- 230000002265 prevention Effects 0.000 description 1
- 238000010008 shearing Methods 0.000 description 1
Images

















Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L3/00—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets
- F16L3/01—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets for supporting or guiding the pipes, cables or protective tubing, between relatively movable points, e.g. movable channels
- F16L3/015—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets for supporting or guiding the pipes, cables or protective tubing, between relatively movable points, e.g. movable channels using articulated- or supple-guiding elements
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J19/00—Accessories fitted to manipulators, e.g. for monitoring, for viewing; Safety devices combined with or specially adapted for use in connection with manipulators
- B25J19/0025—Means for supplying energy to the end effector
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16G—BELTS, CABLES, OR ROPES, PREDOMINANTLY USED FOR DRIVING PURPOSES; CHAINS; FITTINGS PREDOMINANTLY USED THEREFOR
- F16G13/00—Chains
- F16G13/12—Hauling- or hoisting-chains so called ornamental chains
- F16G13/16—Hauling- or hoisting-chains so called ornamental chains with arrangements for holding electric cables, hoses, or the like
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L3/00—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets
- F16L3/26—Supports for pipes, cables or protective tubing, e.g. hangers, holders, clamps, cleats, clips, brackets specially adapted for supporting the pipes all along their length, e.g. pipe channels or ducts
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16L—PIPES; JOINTS OR FITTINGS FOR PIPES; SUPPORTS FOR PIPES, CABLES OR PROTECTIVE TUBING; MEANS FOR THERMAL INSULATION IN GENERAL
- F16L57/00—Protection of pipes or objects of similar shape against external or internal damage or wear
- F16L57/02—Protection of pipes or objects of similar shape against external or internal damage or wear against cracking or buckling
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02G—INSTALLATION OF ELECTRIC CABLES OR LINES, OR OF COMBINED OPTICAL AND ELECTRIC CABLES OR LINES
- H02G11/00—Arrangements of electric cables or lines between relatively-movable parts
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Electric Cable Arrangement Between Relatively Moving Parts (AREA)
- Flexible Shafts (AREA)
- Installation Of Indoor Wiring (AREA)
Abstract
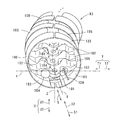
【課題】 ケーブルの支持装置に用いられる変形構造体であって、強度を向上して、予め定める変形形状に維持することができる変形構造体を提供する。
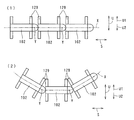
【解決手段】 一方の基部102に設けられるスペーサ部材104が、他方の基部102に当接することによって、延在方向に隣接する各結合部の第1軸線が互いに傾斜し、変形構造体83を円弧状に延ばすことができる。スペーサ部材104が他方の基部102に当接した状態から、スペーサ部材104の両側の2つの基部102がさらに近接する方向の外力が与えられた場合、スペーサ部材104によって、両側の基部102が互いに近接することが阻まれる。このような外力が与えられたとしても、基部102とスペーサ部材104とに力が与えられるのみで、構造的に強度の弱い結合部に与えられる力を抑えることができる。これによって結合部102が破損することを防止することができ、変形構造体の強度83を向上することができる。
【選択図】 図1
Description
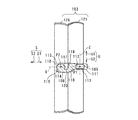
予め定める延在軸線に沿う延在方向に並んで互いに結合される結合部であって、結合される2つの結合部のうち一方の結合部が、他方の結合部に対して、一方の結合部に設定されて延在軸線に交差する第1軸線まわりに所定量の角変位が自在な複数の結合部と、
前記第1軸線に沿う第1方向に延びて、結合部が連なる基部と、
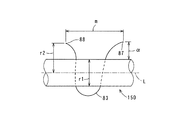
延在方向に隣接する2つの基部のうち、少なくとも一方の基部に設けられて第1方向に関して結合部と異なる位置から延在方向に突出する規制部であって、他方の基部に当接することで、延在方向に隣接する2つの基部にそれぞれ連なる各結合部の第1軸線が互いに傾斜する規制部とを含むことを特徴とする変形構造体である。
規制部は、一方の基部に対して着脱可能に設けられることを含むことを特徴とする。
(a)前記第1駆動部に固定される第1固定部と、
(b)前記第2駆動部に固定され、第1固定部に対して前記旋回軸線の軸線方向に間隔をあけて配置される第2固定部と、
(c)前記変形構造体であって、延在方向一端部が第1固定部に固定され、延在方向他端部が第2固定部に固定されて、前記駆動装置の外周にそって湾曲して延び、各結合部分は、隣接する結合部に対して前記旋回軸線に平行な軸線まわりの角変位が規制部によって防がれるとともに、前記旋回軸線に直交する軸線まわりの所定量の角変位を許容する変形構造体と、
(d)ケーブルを変形構造体の延在軸線に沿って保持する保持部とを含むことを特徴とするケーブルの支持装置である。
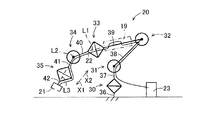
20 産業用ロボット
22 ケーブル
81 第1固定部
82 第2固定部
83 変形構造体
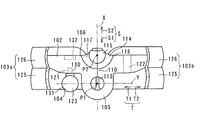
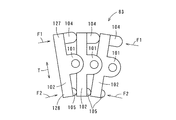
101 結合部
102 基部
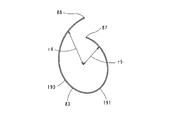
103 外套部
125 外皮部
126 内皮部
104 スペーサ部材
121 着座部
124 ワイヤー部材
123 対向面
129 制限部
132 当接部
S 延在方向
X 延在軸線
T 第1方向
Y 第1軸線
U 第2方向
Z 第2軸線
Claims (7)
- 可撓性を有するケーブルを支持するケーブル支持装置に用いられ、略円弧長尺状に形成されて予め定める方向に所定量変形可能な変形構造体であって、
予め定める延在軸線に沿う延在方向に並んで互いに結合される結合部であって、結合される2つの結合部のうち一方の結合部が、他方の結合部に対して、一方の結合部に設定されて延在軸線に交差する第1軸線まわりに所定量の角変位が自在な複数の結合部と、
前記第1軸線に沿う第1方向に延びて、結合部が連なる基部と、
延在方向に隣接する2つの基部のうち、少なくとも一方の基部に設けられて第1方向に関して結合部と異なる位置から延在方向に突出する規制部であって、他方の基部に当接することで、延在方向に隣接する2つの基部にそれぞれ連なる各結合部の第1軸線が互いに傾斜する規制部とを含むことを特徴とする変形構造体。 - 規制部は、結合部を挟んで基部の第1方向両側部分にそれぞれ設けられることを特徴とする請求項1記載の変形構造体。
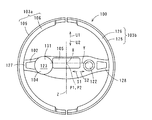
- 結合される2つの結合部のうち一方の結合部が、他方の結合部に対して、前記第1軸線と延在軸線とに対して直交する第2軸線まわりに角変位自在に形成され、
規制部は、一方の基部に対して着脱可能に設けられることを特徴とする請求項1または2記載の変形構造体。 - 規制部のうちで他方の基部に対向する対向面は、前記第1軸線まわりに湾曲し、第1軸線からの距離が一定の曲率半径を有する曲面に形成されることを特徴とする請求項1〜3のいずれか1つに記載の変形構造体。
- 他方の基部は、一方の基部に設けられる規制部が当接する当接部が形成され、当接部は、規制部が当接部に当接した状態で、延在軸線と第1軸線とを含んで構成される仮想平面に関して両側で、規制部に当接することを特徴とする請求項1〜4のいずれか1つに記載の変形構造体。
- 規制部が他方の基部に接触した状態に維持する維持部材をさらに含むことを特徴とする請求項1〜5のいずれか1つに記載の変形構造体。
- 第1駆動部と、前記第1駆動部に対して予め定められる旋回軸線まわりに相対角変位する第2駆動部とを含んで構成される駆動装置に設けられ、前記第1駆動部と前記第2駆動部とにわたって延びて、可撓性を有するケーブルを支持するケーブルの支持装置であって、
(a)前記第1駆動部に固定される第1固定部と、
(b)前記第2駆動部に固定され、第1固定部に対して前記旋回軸線の軸線方向に間隔をあけて配置される第2固定部と、
(c)請求項1〜6のいずれか1つに記載の変形構造体であって、延在方向一端部が第1固定部に固定され、延在方向他端部が第2固定部に固定されて、前記駆動装置の外周にそって湾曲して延び、各結合部分は、隣接する結合部に対して前記旋回軸線に平行な軸線まわりの角変位が規制部によって防がれるとともに、前記旋回軸線に直交する軸線まわりの所定量の角変位を許容する変形構造体と、
(d)ケーブルを変形構造体の延在軸線に沿って保持する保持部とを含むことを特徴とするケーブルの支持装置。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005125723A JP4376822B2 (ja) | 2005-04-22 | 2005-04-22 | 変形構造体およびケーブルの支持装置 |
| KR1020060036229A KR100808308B1 (ko) | 2005-04-22 | 2006-04-21 | 가변구조물과 케이블지지시스템 |
| EP06252180A EP1714751B1 (en) | 2005-04-22 | 2006-04-21 | Deformable structure and cable support system |
| US11/408,001 US7484351B2 (en) | 2005-04-22 | 2006-04-21 | Deformable structure and cable support system |
| CNB2006100777858A CN100445050C (zh) | 2005-04-22 | 2006-04-24 | 可变形结构和缆线支承系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005125723A JP4376822B2 (ja) | 2005-04-22 | 2005-04-22 | 変形構造体およびケーブルの支持装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006304559A true JP2006304559A (ja) | 2006-11-02 |
| JP4376822B2 JP4376822B2 (ja) | 2009-12-02 |
Family
ID=36763022
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005125723A Active JP4376822B2 (ja) | 2005-04-22 | 2005-04-22 | 変形構造体およびケーブルの支持装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US7484351B2 (ja) |
| EP (1) | EP1714751B1 (ja) |
| JP (1) | JP4376822B2 (ja) |
| KR (1) | KR100808308B1 (ja) |
| CN (1) | CN100445050C (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150139587A (ko) * | 2013-04-05 | 2015-12-11 | 이구스 게엠베하 | 다축 방향으로 각도 조정 가능한 링크를 포함하는 케이블 가이드 |
| KR20160139174A (ko) * | 2015-05-27 | 2016-12-07 | 주식회사 오피스안건사 | 케이블 정리용 조립식 홀더 |
| JP2018122404A (ja) * | 2017-02-01 | 2018-08-09 | 株式会社神戸製鋼所 | 多関節溶接ロボット |
| KR20180135937A (ko) * | 2016-04-20 | 2018-12-21 | 이구스 게엠베하 | 코일링 및 언코일링될 수 있는 적어도 하나의 공급 라인을 위한 라인 가이딩 시스템 및 이를 위한 로터리 가이드 |
| JP2019013138A (ja) * | 2017-05-11 | 2019-01-24 | ヘラーマンタイトン・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツングHellermannTyton GmbH | ケーブルチャネルモジュール、ケーブルチャネルモジュールのモジュール式アセンブリ、および、モジュール式アセンブリを組み立てる方法 |
Families Citing this family (33)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7644571B2 (en) * | 2005-06-01 | 2010-01-12 | Durr Systems, Inc. | Hose conduit element for a paint robot |
| ATE402356T1 (de) * | 2006-02-27 | 2008-08-15 | Bauer Maschinen Gmbh | Versorgungsband |
| AU2007308935B2 (en) * | 2006-10-24 | 2014-07-17 | Carnegie Mellon University | Steerable multi-linked device having a modular link assembly |
| EP2330965B1 (en) | 2008-09-05 | 2018-07-11 | Carnegie Mellon University | Multi-linked endoscopic device with spherical distal assembly |
| US7984605B2 (en) * | 2008-09-10 | 2011-07-26 | Netapp, Inc. | Cable chain return system and associated methods |
| US7552581B1 (en) * | 2008-09-10 | 2009-06-30 | Lsi Corporation | Articulating cable chain assembly |
| US8215592B2 (en) * | 2008-11-26 | 2012-07-10 | Obo Bettermann Of North America | EGC compliant wire mesh cable tray system |
| DE202009005546U1 (de) | 2009-04-16 | 2009-06-18 | Igus Gmbh | Kabelführung |
| DE102010003282B4 (de) * | 2010-03-25 | 2015-08-20 | Trumpf Werkzeugmaschinen Gmbh + Co. Kg | Leitungsführungseinrichtung, insbesondere Energieführungskette |
| JP4837117B2 (ja) | 2010-04-14 | 2011-12-14 | ファナック株式会社 | ロボットアーム部の線条体配設機構 |
| JP4865882B2 (ja) * | 2010-04-16 | 2012-02-01 | ファナック株式会社 | ロボット手首部の線条体配設機構 |
| US8297560B2 (en) * | 2010-08-10 | 2012-10-30 | Modernsolid Industrial Co., Ltd. | Line-management assembly |
| FR2965866B1 (fr) * | 2010-10-08 | 2013-11-01 | Peugeot Citroen Automobiles Sa | Dispositif pour transmettre des efforts de traction entre au moins deux cables |
| CN102918731B (zh) * | 2011-03-28 | 2015-12-02 | 株式会社润工社 | 线缆支承构件及线缆支承装置 |
| KR101289985B1 (ko) * | 2011-05-27 | 2013-07-26 | 한양대학교 에리카산학협력단 | 로봇 관절체 메커니즘 |
| US8549831B2 (en) | 2011-06-08 | 2013-10-08 | Lsi Corporation | Systems and methods for tool-less retractable storage of lengths of cable chain |
| JP5890653B2 (ja) * | 2011-10-28 | 2016-03-22 | 川崎重工業株式会社 | 多軸ロボット |
| JP5661718B2 (ja) | 2012-10-12 | 2015-01-28 | ファナック株式会社 | ロボットの線条体取付装置 |
| CN103878784B (zh) * | 2014-03-19 | 2016-03-09 | 苏州大学 | 一种水下蛇形机器人关节模块 |
| US9557005B2 (en) | 2014-05-23 | 2017-01-31 | Roger Neil Rovekamp | Planar non-compressible rigidizable chain assembly |
| CN104959996A (zh) * | 2015-06-26 | 2015-10-07 | 常州展华机器人有限公司 | 自动机器人机械手连接线保护管套 |
| US10577872B2 (en) * | 2015-07-28 | 2020-03-03 | Halliburton Energy Services, Inc. | Curbed links for wiring conduit |
| JP6501120B2 (ja) * | 2015-10-23 | 2019-04-17 | 住友電装株式会社 | 電線ガイド |
| CN106066903B (zh) * | 2016-01-26 | 2019-03-29 | 西北工业大学 | 一种面向机器人末端执行器的结构强度校核方法 |
| DE102016203361A1 (de) * | 2016-03-01 | 2017-09-07 | Kuka Roboter Gmbh | Industrieroboter mit einer Schutzmanschette |
| JP6734103B2 (ja) * | 2016-04-06 | 2020-08-05 | 川崎重工業株式会社 | ロボット制御装置および同制御装置を備えたロボット |
| DE202016105507U1 (de) * | 2016-10-04 | 2017-11-07 | Igus Gmbh | Drehdurchführung für Leitungen |
| CN107053258A (zh) * | 2017-05-26 | 2017-08-18 | 绵阳伦奇机器人有限公司 | 一种拖链的铰接结构 |
| CN107565494B (zh) * | 2017-09-27 | 2024-02-02 | 中国电子科技集团公司第五十四研究所 | 一种平面内旋转运动有限角度走线装置 |
| KR102159813B1 (ko) * | 2018-12-27 | 2020-09-24 | 재단법인대구경북과학기술원 | 순응 관절 |
| WO2021178230A1 (en) * | 2020-03-02 | 2021-09-10 | Corning Research & Development Corporation | Optical fiber cable tensile strength limiting system |
| US11848546B2 (en) | 2021-02-01 | 2023-12-19 | Magna Powertrain Of America, Inc. | High voltage wire protection system for electric vehicles |
| CN117189523A (zh) * | 2022-05-31 | 2023-12-08 | 金风科技股份有限公司 | 盘管装置、液冷系统以及风力发电机组 |
Family Cites Families (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4409455A (en) | 1982-03-05 | 1983-10-11 | Cincinnati Milacron Inc. | Dielectric heating section for blow molding machine |
| JPS58184293U (ja) * | 1982-06-02 | 1983-12-08 | 三機工業株式会社 | 旋回部のケ−ブル支持装置 |
| US4582281A (en) * | 1983-06-06 | 1986-04-15 | Sine Products Company | Flexible support and carrier assembly |
| JPS6234795A (ja) | 1985-08-01 | 1987-02-14 | フアナツク株式会社 | 産業用ロボツトのケ−ブル支持装置 |
| IT208046Z2 (it) * | 1986-09-15 | 1988-03-31 | Tecno Mobili E Forniture Per A | Organo passocavo flessibile a snodi bidirezionali. |
| AU673655B2 (en) * | 1991-09-03 | 1996-11-21 | Technology Finance Corporation (Proprietary) Limited | Electrical cable containment |
| US5824957A (en) * | 1991-09-03 | 1998-10-20 | Technology Finance Corporation (Proprietary) Limited | Electrical cable containment |
| JPH0573339U (ja) * | 1992-03-11 | 1993-10-08 | 大和電業株式会社 | 開放型ケーブルドラッグチェーン |
| DE19716695C1 (de) | 1997-04-21 | 1998-12-10 | Kabelschlepp Gmbh | Energieführungskette zum stationären Führen von Leitungen |
| DK174401B1 (da) * | 1997-05-15 | 2003-02-10 | Raunkjaer Hans Thyge | System til fremføring af bundter af ledninger |
| DE29913063U1 (de) * | 1999-07-30 | 2000-02-17 | Igus Spritzgußteile für die Industrie GmbH, 51147 Köln | Energiezuführungskette |
| JP3356758B2 (ja) * | 2000-09-13 | 2002-12-16 | 株式会社椿本チエイン | ケーブルドラグチェーン |
| DE20107003U1 (de) * | 2001-04-23 | 2002-09-19 | Igus Spritzgußteile für die Industrie GmbH, 51147 Köln | Energieführungskette |
| JP4142304B2 (ja) * | 2001-10-22 | 2008-09-03 | 株式会社安川電機 | アーク溶接用ロボット |
| DE10216081B4 (de) * | 2002-04-11 | 2005-03-31 | Kabelschlepp Gmbh | Roboter mit einer Leitungsführungseinrichtung |
| KR200292293Y1 (ko) * | 2002-07-25 | 2002-10-18 | 김두진 | 케이블체인용 체인구 |
| JP3717071B2 (ja) * | 2002-11-05 | 2005-11-16 | 株式会社椿本チエイン | 密閉型ケーブルドラグチェーン |
| DE20305677U1 (de) | 2003-04-07 | 2003-07-10 | Igus Spritzgußteile für die Industrie GmbH, 51147 Köln | Kabelführung |
-
2005
- 2005-04-22 JP JP2005125723A patent/JP4376822B2/ja active Active
-
2006
- 2006-04-21 EP EP06252180A patent/EP1714751B1/en active Active
- 2006-04-21 KR KR1020060036229A patent/KR100808308B1/ko not_active IP Right Cessation
- 2006-04-21 US US11/408,001 patent/US7484351B2/en active Active
- 2006-04-24 CN CNB2006100777858A patent/CN100445050C/zh active Active
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20150139587A (ko) * | 2013-04-05 | 2015-12-11 | 이구스 게엠베하 | 다축 방향으로 각도 조정 가능한 링크를 포함하는 케이블 가이드 |
| KR102284885B1 (ko) | 2013-04-05 | 2021-08-02 | 이구스 게엠베하 | 다축 방향으로 각도 조정 가능한 링크를 포함하는 케이블 가이드 |
| KR20160139174A (ko) * | 2015-05-27 | 2016-12-07 | 주식회사 오피스안건사 | 케이블 정리용 조립식 홀더 |
| KR101689756B1 (ko) * | 2015-05-27 | 2017-01-09 | 주식회사 오피스안건사 | 케이블 정리용 조립식 홀더 |
| KR20180135937A (ko) * | 2016-04-20 | 2018-12-21 | 이구스 게엠베하 | 코일링 및 언코일링될 수 있는 적어도 하나의 공급 라인을 위한 라인 가이딩 시스템 및 이를 위한 로터리 가이드 |
| JP2019520282A (ja) * | 2016-04-20 | 2019-07-18 | イグス ゲゼルシャフト ミット ベシュレンクター ハフトゥング | 巻取りおよび巻出しされ得る少なくとも1本の供給ラインのための線材案内システム、および線材案内システムのための回転式ガイド |
| US11235947B2 (en) | 2016-04-20 | 2022-02-01 | Igus Gmbh | Line guiding system for at least one supply line which can be coiled and uncoiled and rotary guide therefor |
| JP7084876B2 (ja) | 2016-04-20 | 2022-06-15 | イグス ゲゼルシャフト ミット ベシュレンクター ハフトゥング | 巻取りおよび巻出しされ得る少なくとも1本の供給ラインのための線材案内システム、および線材案内システムのための回転式ガイド |
| KR102554680B1 (ko) | 2016-04-20 | 2023-07-13 | 이구스 게엠베하 | 코일링 및 언코일링될 수 있는 적어도 하나의 공급 라인을 위한 라인 가이딩 시스템 및 이를 위한 로터리 가이드 |
| JP2018122404A (ja) * | 2017-02-01 | 2018-08-09 | 株式会社神戸製鋼所 | 多関節溶接ロボット |
| US11220011B2 (en) | 2017-02-01 | 2022-01-11 | Kobe Steel, Ltd. | Multi-jointed welding robot |
| JP2019013138A (ja) * | 2017-05-11 | 2019-01-24 | ヘラーマンタイトン・ゲゼルシャフト・ミット・ベシュレンクテル・ハフツングHellermannTyton GmbH | ケーブルチャネルモジュール、ケーブルチャネルモジュールのモジュール式アセンブリ、および、モジュール式アセンブリを組み立てる方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP1714751B1 (en) | 2012-05-16 |
| EP1714751A2 (en) | 2006-10-25 |
| EP1714751A3 (en) | 2007-12-26 |
| KR20060111407A (ko) | 2006-10-27 |
| KR100808308B1 (ko) | 2008-02-27 |
| JP4376822B2 (ja) | 2009-12-02 |
| US20060258229A1 (en) | 2006-11-16 |
| US7484351B2 (en) | 2009-02-03 |
| CN100445050C (zh) | 2008-12-24 |
| CN1850456A (zh) | 2006-10-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4376822B2 (ja) | 変形構造体およびケーブルの支持装置 | |
| CN110248778B (zh) | 多关节焊接机器人 | |
| EP1743748B1 (en) | Guiding structure comprising a flexible tabular guide member for an umbilical member of an industrial robot | |
| CN100411831C (zh) | 机器人手臂的线缆的配设构造及具备它的工业用机器人 | |
| EP1257390B1 (en) | Industrial robot | |
| CN109421065B (zh) | 机器人以及机器人系统 | |
| US20050011295A1 (en) | Industrial robot | |
| JP2007229874A (ja) | 産業用ロボット | |
| JP2009522121A (ja) | ロボットアーム | |
| KR102206699B1 (ko) | 산업용 로봇 | |
| CN104275707A (zh) | 机器人用驱动线缆的处理构造体和机器人装置 | |
| JP5833836B2 (ja) | 多関節型産業用ロボット | |
| KR102020278B1 (ko) | 산업용 로봇의 케이블 가이드 장치 | |
| CN110234474A (zh) | 机器人手臂的线束连接结构、以及多关节焊接机器人 | |
| JP5151514B2 (ja) | 線条体案内機構を備えた産業用ロボット | |
| JP4831867B2 (ja) | 産業用ロボットおよびその動作方法 | |
| US20060104791A1 (en) | Umbilical member managing system for industrial robot | |
| JP5151513B2 (ja) | 線条体案内機構を備えた産業用ロボット | |
| JP2006159372A (ja) | 産業用ロボット | |
| JP2004223635A (ja) | パラレルリンク機構の配線配管構造 | |
| US20190321906A1 (en) | Articulated welding robot | |
| JP2003311672A (ja) | ロボットの線条体案内装置 | |
| US20020007692A1 (en) | Manipulator | |
| JP2007175849A (ja) | ロボット | |
| JPH0724777A (ja) | 配管・配線を備えるロボットアーム構造 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070112 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20081028 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090309 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090526 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090727 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20090908 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20090909 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4376822 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120918 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20120918 Year of fee payment: 3 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20130918 Year of fee payment: 4 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20140918 Year of fee payment: 5 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |